JP2016055865A - 自転車用装置およびこれを備える自転車用電動システム - Google Patents
自転車用装置およびこれを備える自転車用電動システム Download PDFInfo
- Publication number
- JP2016055865A JP2016055865A JP2015179694A JP2015179694A JP2016055865A JP 2016055865 A JP2016055865 A JP 2016055865A JP 2015179694 A JP2015179694 A JP 2015179694A JP 2015179694 A JP2015179694 A JP 2015179694A JP 2016055865 A JP2016055865 A JP 2016055865A
- Authority
- JP
- Japan
- Prior art keywords
- operation unit
- unit
- output
- assist motor
- bicycle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Landscapes
- Gear-Shifting Mechanisms (AREA)
Abstract
【解決手段】自転車用装置の変速ケーブル58は、一般的にアウターケーブルと、インナーケーブルを含む。しかし、従来技術ではインナーケーブルの動きを検出するために、アウターケーブルを分割、または取り除く必要がある。このため、インナーケーブルの耐久性を低下させるおそれがある。変速機52に変速ケーブル58を連結する連結部54を設け、連結部54の動きを検出する検出部とを備えることで、変速ケーブル58に特別な加工を加えなくても変速を検出または変速を予測することができる自転車用装置およびこれを備える自転車用電動システムを提供する。
【選択図】図2
Description
〔2〕前記自転車用装置の一形態によれば、前記変速機は、自転車のハブと一体化されたものであり、前記連結部は、ハブ軸に直接的または間接的に設けられる固定部と、前記ハブ軸に対して回転可能に設けられる回転体とを備え、前記検出部は、前記固定部と前記回転体との相対回転位置を検出する。
〔4〕前記自転車用装置の一形態によれば、前記回転体の外周には、前記ケーブルの一端が巻き掛けられる。
〔6〕前記自転車用装置の一形態によれば、前記変速機をさらに備える。
操作者の操作により、図4に示す第2の操作部86が周方向の一方に回されたとき、第2の操作部86が周方向の一方に回転する。そして、第2の操作部86が第2初期位置から第2所定位置に向かって移動を開始する。第2の操作部86の凹部86Bの内面が第2の検出部96と接触すると、第2の検出部96がオン信号を出力する。そして、さらに第2の操作部86の相対回転位置が図7に示す第2所定位置に達したとき、第2の操作部86が第1の操作部84を押すことによって、変速可能である場合に第1の操作部84が周方向の一方に回転する。図7では、第2の操作部86は、第2の検出部96を介して第1の操作部84を押しているが、第2の操作部86および第1の操作部84の少なくともいずれか一方に、第2の検出部96のスイッチの接点が閉じた後に、第2の操作部86および第1の操作部84の周方向の一方への相対回転を規制する規制部を設けることもできる。この場合、第2の操作部86は、この規制部を介して第1の操作部84を押すことができる。規制部を設けることによって、第2の検出部96に過度な力が加えられることを防止できる。なお、変速可能である場合とは、シフトアップ側への操作においては、現在の変速段が最大の変速段よりも小さい場合である。シフトダウン側への操作においては、現在の変速段が最小の変速段よりも大きい場合である。
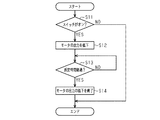
ステップS11に示されるように制御部28は、第1の検出部94または第2の検出部96のスイッチがオンされたか否かを判定する。具体的には、第1の検出部94または第2の検出部96からオン信号が入力されたとき、第1の検出部94または第2の検出部96のスイッチがオンされた旨を判定し、ステップS12に進む。
次に、制御部28は、アシストモータ42の出力を低下させてから所定時間TXが経過したか否かを判定する。所定時間TXは、変速機52(図2参照)による変速段の変更に必要と考えられる標準的な時間よりも十分に大きい時間が設定されることが好ましい。
(1)シフター70は、巻取部76に対する操作部82の動きに応じて制御部28にオン信号を出力する。このため、制御部28は、変速機52による変速比の変更の動作に応じたアシストモータ42の出力の制御を行うことができる。このため、変速性能が向上する。
本実施形態の自転車用電動システムは、アシスト機構22、変速装置26、制御部28、および、図10に示されるレバー型のシフター100を備えている。
図11に示されるように、本体部102は、ハンドルバー14にホルダ104A(図10参照)を介して取り付けられるケース104、ケーブル58を巻き取る巻取部106、巻取部106に連結されて巻取部106の回転を規制するラチェット108を備えている。巻取部106は、ボビンであり、ケーブル58の端部が嵌め込まれる溝106Aを備えている。ラチェット108は、円盤状または扇形の部材である。ラチェット108は、外周部に複数のラチェット歯を備える。
操作者の操作により、シフトアップ用の操作部110が押されたとき、第2の操作部118が第1の操作部114に近づく。すなわち、第2の操作部118の位置が初期位置から第2所定位置に向かって移動を開始する。第2の操作部118の位置が第2の操作部118が第1の検出部134と接触する中間位置に達したとき、第1の検出部134がオン信号を出力する。そして、さらに第2の操作部118の位置が第2所定位置に達したとき、第1の操作部114と第2の操作部118とが連動して第1の操作部114を回動させる。
本実施形態の自転車用電動システムは、アシスト機構22、シフター70、制御部28、および、図12に示される外装型の変速機140を備えている。また、リアスプロケット38(図1参照)は、歯数の異なる複数のリアスプロケット38が軸方向に並べられたものである。
変速機140は、ベース部材142、連結機構144、および、支持部材146を含む。ベース部材142は、フレーム12(図1参照)に取り付け可能である。
連結機構144は、インナーリンク148、アウターリンク150、および、可動部材152を含む。
変速機140は、チェーン40を異なるリアスプロケット38に巻き掛けることにより自転車10の変速比を変更する。
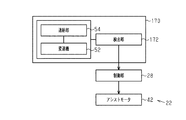
図13を参照して、第4実施形態の自転車用電動システムについて説明する。
自転車用電動システムは、変速装置170、制御部28、および、アシスト機構22を備えている。変速装置170は、図2に示す変速機52、図3に示す連結部54、および、検出部172を備えている。検出部172は、変速機52の動きに応じた信号を制御部28に出力する。例えば、検出部172は、連結部54の回転体の動きを検出して、制御部28に信号を出力する。検出部172は、たとえばポテンショメータ、磁気センサまたはロータリーエンコーダなどによって構成されてもよく、連結部54の固定部と回転体56との相対回転位置を検出可能なセンサであればよい。制御部28は、検出部172からの信号に基づいて、変速装置170による変速比の変更が行われていると判定したとき、アシストモータ42の出力を低下させる。自転車用電動システムによれば、変速装置170による変速比の変更の動作に応じたアシストモータ42の出力の制御を行うことができる。このため、変速性能が向上する。
図14を参照して、第5実施形態の自転車用電動システムについて説明する。
自転車用電動システムは、変速装置182、制御部28、アシスト機構22、および、シフター180を備えている。
変速装置182は、図2に示す変速機52、図14に示す電動アクチュエータ184、および、検出部186を備えている。電動アクチュエータ184は、電動モータを含み、さらに減速機を含んでいてもよい。検出部186は、電動アクチュエータ184の動きに応じた信号を制御部28に出力する。例えば、検出部186は、電動アクチュエータ184の出力軸、減速機の中間軸、または電動モータ軸の回転角度に応じた信号を制御部28に出力する。制御部28は、検出部186からの信号に基づいて、変速装置182による変速比の変更が行われていると判定したとき、アシストモータ42の出力を低下させる。検出部186は、たとえばポテンショメータ、磁気センサまたはロータリーエンコーダなどによって構成される。自転車用電動システムによれば、変速装置182による変速比の変更の動作に応じたアシストモータ42の出力の制御を行うことができる。このため、変速性能が向上する。
図15を参照して、第6実施形態の自転車用電動システムについて説明する。
自転車用電動システムは、変速装置190、制御部28、アシスト機構22、および、シフター180を備えている。
本自転車用電動システム等が取り得る具体的な形態は、上記実施形態に例示された形態に限定されない。本自転車用電動システム等は、上記実施形態とは異なる各種の形態を取り得る。以下に示される上記実施形態の変形例は、本自転車用電動システム等が取り得る各種の形態の一例である。
・第1実施形態の第1の操作部84を省略して、巻取部76の外周に第2の操作部86を設ける構成としてもよい。この場合、巻取部76のうちの第2の操作部86に外囲される部分の形状を第1の操作部84の形状と同様に形成すればよい。
・各実施形態の変速装置は、フロントディレイラおよびフロント内装変速装置などのフロント変速装置であってもよい。
26,170,182,190…変速装置
28…制御部
42…アシストモータ
52,140,192…変速機
54…連結部
58…ケーブル
70,100…シフター
76,106…巻取部
82,110,112…操作部
84,114,122…第1の操作部
86,118,126…第2の操作部
90,120,128…復帰機構
92,132,172,186,196…検出部
184,194…電動アクチュエータ
Claims (10)
- 変速機を動かすケーブルおよび前記変速機を連結する連結部と、
前記連結部の動きを検出する検出部とを備える
自転車用装置。 - 前記変速機は、自転車のハブと一体化されたものであり、
前記連結部は、ハブ軸に直接的または間接的に設けられる固定部と、前記ハブ軸に対して回転可能に設けられる回転体とを備え、
前記検出部は、前記固定部と前記回転体との相対回転位置を検出する、請求項1に記載の自転車用装置。 - 前記回転体は、前記変速機に対して着脱可能である、請求項2に記載の自転車用装置。
- 前記回転体の外周には、前記ケーブルの一端が巻き掛けられる、請求項2または3に記載の自転車用装置。
- 前記検出部は、ポテンショメータ、磁気センサまたはロータリーエンコーダを含む、請求項1〜4のいずれか一項に記載の自転車用装置。
- 前記変速機をさらに備える、請求項1〜5のいずれか一項に記載の自転車用装置。
- 請求項6記載の自転車用装置と、
人力駆動力をアシストするアシストモータを前記検出部の出力信号に基づいて制御する制御部と
を備え、
前記制御部は前記出力信号に基づいて前記アシストモータの出力を低下させる、または、前記アシストモータの出力をオフする
自転車用電動システム。 - 前記制御部は前記出力信号が入力される時間が閾値以上のときに前記アシストモータの出力を低下させる、または、前記アシストモータの出力をオフする
請求項7に記載の自転車用電動システム。 - 前記制御部は前記アシストモータの出力を低下させている時間が閾値以上のとき、前記アシストモータの出力を増加させる、または、前記アシストモータの出力をオフしている時間が閾値以上のとき、前記アシストモータの出力をオンする
請求項7または8に記載の自転車用電動システム。 - 前記変速機の変速が完了したことに応じて信号を出力する変速検出部をさらに備え、
前記制御部は前記アシストモータの出力を低下させているとき、または、前記アシストモータの出力をオフしているときに前記変速検出部の信号が入力されたとき、前記アシストモータの出力を増加させる、または、前記アシストモータの出力をオンする
請求項7〜9のいずれか一項に記載の自転車用電動システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015179694A JP6185027B2 (ja) | 2015-09-11 | 2015-09-11 | 自転車用電動システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015179694A JP6185027B2 (ja) | 2015-09-11 | 2015-09-11 | 自転車用電動システム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014181748A Division JP5937649B2 (ja) | 2014-09-05 | 2014-09-05 | 自転車用シフターおよびこれを備える自転車用電動システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017143314A Division JP6434578B2 (ja) | 2017-07-25 | 2017-07-25 | 自転車用電動システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016055865A true JP2016055865A (ja) | 2016-04-21 |
| JP6185027B2 JP6185027B2 (ja) | 2017-08-23 |
Family
ID=55757363
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015179694A Active JP6185027B2 (ja) | 2015-09-11 | 2015-09-11 | 自転車用電動システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6185027B2 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53535A (en) * | 1976-06-24 | 1978-01-06 | Suzuki Motor Co | Shifting speed position indicator for bicycle |
| JPS5849592A (ja) * | 1981-09-18 | 1983-03-23 | 三洋電機株式会社 | 自転車用電動変速装置 |
| JPH04358989A (ja) * | 1991-06-05 | 1992-12-11 | Yamaha Motor Co Ltd | 自転車の変速装置 |
| JPH0710069A (ja) * | 1993-06-29 | 1995-01-13 | Shimano Inc | 自転車用内装変速ハブ |
| JPH1035566A (ja) * | 1996-07-23 | 1998-02-10 | Shimano Inc | 自転車用表示装置 |
| JP2004268854A (ja) * | 2003-03-11 | 2004-09-30 | Shimano Inc | 二輪車用変速制御装置 |
| JP2008296652A (ja) * | 2007-05-30 | 2008-12-11 | Bridgestone Cycle Co | 電動アシスト自転車用変速装置 |
| JP2009196570A (ja) * | 2008-02-25 | 2009-09-03 | Panasonic Corp | 電動自転車の自動変速方法 |
-
2015
- 2015-09-11 JP JP2015179694A patent/JP6185027B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53535A (en) * | 1976-06-24 | 1978-01-06 | Suzuki Motor Co | Shifting speed position indicator for bicycle |
| JPS5849592A (ja) * | 1981-09-18 | 1983-03-23 | 三洋電機株式会社 | 自転車用電動変速装置 |
| JPH04358989A (ja) * | 1991-06-05 | 1992-12-11 | Yamaha Motor Co Ltd | 自転車の変速装置 |
| JPH0710069A (ja) * | 1993-06-29 | 1995-01-13 | Shimano Inc | 自転車用内装変速ハブ |
| JPH1035566A (ja) * | 1996-07-23 | 1998-02-10 | Shimano Inc | 自転車用表示装置 |
| JP2004268854A (ja) * | 2003-03-11 | 2004-09-30 | Shimano Inc | 二輪車用変速制御装置 |
| JP2008296652A (ja) * | 2007-05-30 | 2008-12-11 | Bridgestone Cycle Co | 電動アシスト自転車用変速装置 |
| JP2009196570A (ja) * | 2008-02-25 | 2009-09-03 | Panasonic Corp | 電動自転車の自動変速方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6185027B2 (ja) | 2017-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5937649B2 (ja) | 自転車用シフターおよびこれを備える自転車用電動システム | |
| US9994284B2 (en) | Bicycle assist unit | |
| EP0811548B1 (en) | Bicycle shifting control unit | |
| JP3850808B2 (ja) | 自転車用シフト制御装置 | |
| EP2042782B1 (en) | Transmission for vehicles | |
| TWI665129B (zh) | 變速機 | |
| US20160207589A1 (en) | Bicycle control apparatus for bicycle assist device and bicycle assist device | |
| JP2001050389A (ja) | 車両用の電動式変速機切換え装置 | |
| JP2009035252A (ja) | 内装変速ハブ | |
| JP5798465B2 (ja) | 自転車のギアシフト部に用いられる制御ケーブル用の作動装置 | |
| TW201736759A (zh) | 自行車用變速器 | |
| TWI661972B (zh) | 內裝變速機 | |
| KR100983985B1 (ko) | 자전거용 변속장치 | |
| JP2004352237A (ja) | 自転車シフト制御装置 | |
| TWI737864B (zh) | 自行車用變速機及自行車用內裝變速輪轂 | |
| JP6434578B2 (ja) | 自転車用電動システム | |
| KR20120133762A (ko) | 자동화 수동 변속기용 액츄에이터 | |
| JP6185027B2 (ja) | 自転車用電動システム | |
| JP3300024B2 (ja) | 自転車用変速操作装置 | |
| JP2006052803A (ja) | 電動多段変速機 | |
| CN214331451U (zh) | 辅助换档装置 | |
| JP2007120770A (ja) | 車両用動力伝達装置 | |
| CN210068862U (zh) | 一种雪橇车的电控换挡系统 | |
| KR101798470B1 (ko) | 자전거용 전자제어방식의 변속기 | |
| KR101197896B1 (ko) | 자전거용 변속장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170329 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170627 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170726 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6185027 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |