JP2016100629A - ポーラループ歪み補償回路 - Google Patents
ポーラループ歪み補償回路 Download PDFInfo
- Publication number
- JP2016100629A JP2016100629A JP2014233691A JP2014233691A JP2016100629A JP 2016100629 A JP2016100629 A JP 2016100629A JP 2014233691 A JP2014233691 A JP 2014233691A JP 2014233691 A JP2014233691 A JP 2014233691A JP 2016100629 A JP2016100629 A JP 2016100629A
- Authority
- JP
- Japan
- Prior art keywords
- amplifier
- voltage
- amplitude
- signal
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Amplifiers (AREA)
- Transmitters (AREA)
- Control Of Amplification And Gain Control (AREA)
Abstract
【課題】広帯域な信号に対しても歪み補償を良好に行うことのできるポーラループ歪み補償回路を得る。
【解決手段】振幅比較器3は、増幅器2からフィードバックした信号と入力信号の振幅を比較する。電圧可変装置6は、振幅比較器3から比較の結果として出力される電圧を調整する。制御部5は、入力信号の平均電力を検出する電力検出器4で検出した値に応じて電圧可変装置6で調整される電圧の重みづけを行う。増幅器2の前段側に設けられた可変利得増幅器1は、電圧可変装置6から出力された電圧を制御電圧として増幅器2の振幅歪みの補償を行う。
【選択図】図1
【解決手段】振幅比較器3は、増幅器2からフィードバックした信号と入力信号の振幅を比較する。電圧可変装置6は、振幅比較器3から比較の結果として出力される電圧を調整する。制御部5は、入力信号の平均電力を検出する電力検出器4で検出した値に応じて電圧可変装置6で調整される電圧の重みづけを行う。増幅器2の前段側に設けられた可変利得増幅器1は、電圧可変装置6から出力された電圧を制御電圧として増幅器2の振幅歪みの補償を行う。
【選択図】図1
Description
本発明は、変調波信号を増幅する増幅器における信号の非線形性を補償するポーラループ歪み補償回路に関するものである。
一般に、通信に用いられる増幅器では、信号を増幅する際に信号波形に歪みが生じる非線形性を有している。通信では線形な信号伝送が求められるため、増幅器で発生する歪みを補償するために歪み補償回路が用いられる。
歪み補償回路は、負帰還型、フィードフォワード型、プリディスト−ション型の3つに大きく分類される。負帰還型は狭帯域の変調波に対して主に用いられ、フィードフォワード型とプリディスト−ション型は基地局用増幅器などに用いられる。プリディストーション型はディジタル信号処理を用いたディジタル・プリディストーションとしてよく用いられている。
負帰還形の歪み補償回路として有名な構成はカルテシアンフィードバック構成とポーラループ構成である。両構成ともに被補償対象の増幅器の一部をフィードバックさせ、カルテシアンフィードバックではベースバンド帯域で、ポーラループ構成ではRF帯域で負帰還をかけて補償する。両構成の問題点は、広い帯域の信号には用いられない点である。広帯域信号を歪み補償する場合、負帰還形では広帯域にわたりループ利得を持つ必要がある。ところが、被補償対象の増幅器の経路とフィードバック経路の群遅延時間により、広帯域に利得を持つと、ある周波数で正帰還がかかり、発振してしまう。
従来、このようなポーラループ歪み補償回路としては例えば特許文献1に示されたものがあった。特許文献1に示された回路は、ポーラループ構成で歪み補償回路の広帯域化を図ったものである。特許文献1ではポーラループ型歪み補償回路において、被補償対象の電力増幅器の前から分岐させた信号と電力増幅器の後から分岐させた信号とを比較し、比較した信号を元の信号と比較する構成であるため、増幅器の出力電力に対する群遅延時間の揺らぎについて改善でき、この効果により広帯域化を図ることができる。
しかしながら、特許文献1に記載の方法では、増幅器の出力電力に対する群遅延時間偏差に対して一定の効果があるが、広帯域な信号に対しては依然解決すべき点が残されていた。すなわち、ポーラループ歪み補償回路では元の信号と増幅器を通過してフィードバックしてきた信号とを比較するため、元の信号とフィードバック信号とに群遅延時間偏差が発生してしまう。群遅延偏差は元の信号系の群遅延時間を遅延回路等で偏差を小さくできるが、ループ利得が大きくなるほど、信号の変調帯域が広くなるほど群遅延時間の偏差により生じる歪み量が大きくなる。したがって、群遅延時間偏差によって生じる歪み量が元の信号の歪み量より悪化してしまうということがあった。
この発明は上記のような課題を解決するためになされたもので、広帯域な信号に対しても歪み補償を良好に行うことのできるポーラループ歪み補償回路を得ることを目的とする。
この発明に係るポーラループ歪み補償回路は、入力信号を増幅する増幅器と、増幅器の前段側に設けられ、増幅器で発生する振幅歪みを補償する可変利得増幅器と、増幅器からフィードバックした信号と入力信号の振幅を比較する振幅比較器と、振幅比較器から比較の結果として出力される電圧を調整する電圧可変装置と、入力信号の平均電力を検出する電力検出器と、電力検出器で検出した値に応じて電圧可変装置で調整される電圧の重みづけを行う制御部とを備え、可変利得増幅器は、電圧可変装置から出力された電圧を制御電圧として前記振幅歪みの補償を行うようにしたものである。
この発明のポーラループ歪み補償回路は、入力電力に応じて電圧可変装置で調整される電圧の重みづけを行い、可変利得増幅器は、電圧可変装置から出力された電圧を制御電圧として振幅歪みの補償を行うようにしたので、広帯域な信号に対しても歪み補償を良好に行うことができる。
実施の形態1.
図1は、この発明の実施の形態1によるポーラループ歪み補償回路を示す構成図である。
図1に示すポーラループ歪み補償回路は、可変利得増幅器1、増幅器2、振幅比較器3、電力検出器4、制御部5、電圧可変装置6、遅延回路7、可変移相器8、可変減衰器9、カップラ10,11,12を備えている。
可変利得増幅器1は、電圧可変装置6から出力される制御電圧に基づいて、カップラ10から入力された変調波信号を増幅する増幅器2の振幅歪みを補償するための回路である。増幅器2は、可変利得増幅器1を介して入力された変調波信号を増幅してカップラ12に出力する回路である。振幅比較器3は、遅延回路7を介して入力された信号と可変移相器8及び可変減衰器9を介して入力されたフィードバック信号(これについては後述する)とを比較し、その差信号を電圧可変装置6に対して送出する回路である。電力検出器4は、カップラ10から入力された変調波信号の平均電力の値を検出する回路である。制御部5は、電力検出器4で検出された値に基づいて、電圧可変装置6から出力される電圧の重みづけを行う回路である。電圧可変装置6は、振幅比較器3の出力を制御部5によって重みづけされた調整電圧とする回路である。遅延回路7は、カップラ10からの信号に対して遅延を行う回路である。可変移相器8及び可変減衰器9は、増幅器2からのフィードバック信号に対して位相及び振幅を調整するための回路である。カップラ10は入力側のカップラ、カップラ11は入力された信号を電力検出器4に入力させるためのカップラ、カップラ12は出力側のカップラである。
図1は、この発明の実施の形態1によるポーラループ歪み補償回路を示す構成図である。
図1に示すポーラループ歪み補償回路は、可変利得増幅器1、増幅器2、振幅比較器3、電力検出器4、制御部5、電圧可変装置6、遅延回路7、可変移相器8、可変減衰器9、カップラ10,11,12を備えている。
可変利得増幅器1は、電圧可変装置6から出力される制御電圧に基づいて、カップラ10から入力された変調波信号を増幅する増幅器2の振幅歪みを補償するための回路である。増幅器2は、可変利得増幅器1を介して入力された変調波信号を増幅してカップラ12に出力する回路である。振幅比較器3は、遅延回路7を介して入力された信号と可変移相器8及び可変減衰器9を介して入力されたフィードバック信号(これについては後述する)とを比較し、その差信号を電圧可変装置6に対して送出する回路である。電力検出器4は、カップラ10から入力された変調波信号の平均電力の値を検出する回路である。制御部5は、電力検出器4で検出された値に基づいて、電圧可変装置6から出力される電圧の重みづけを行う回路である。電圧可変装置6は、振幅比較器3の出力を制御部5によって重みづけされた調整電圧とする回路である。遅延回路7は、カップラ10からの信号に対して遅延を行う回路である。可変移相器8及び可変減衰器9は、増幅器2からのフィードバック信号に対して位相及び振幅を調整するための回路である。カップラ10は入力側のカップラ、カップラ11は入力された信号を電力検出器4に入力させるためのカップラ、カップラ12は出力側のカップラである。
次に、実施の形態1のポーラループ歪み補償回路の動作原理について説明する。
入力された変調波信号はカップラ10を通過し、可変利得増幅器1に向かう。カップラ10を通過する信号の一部は遅延回路7を通り、カップラ11へ向かう。可変利得増幅器1を通過した信号は増幅器2で変調波信号が増幅され、カップラ12を通過し、出力される。カップラ12を通過した信号の一部は可変減衰器9及び可変移相器8を通過し振幅比較器3へ向かう。この信号をフィードバック信号という。振幅比較器3では、カップラ11を通過した信号とフィードバック信号とを比較する。その際、遅延回路7でフィードバック信号との群遅延時間差を小さくし、可変減衰器9と可変移相器8でフィードバック信号の振幅と位相を調整している。振幅比較器3で比較した信号はフィードバック信号との電力差に応じて電圧を発生させる。発生した電圧は電圧可変装置6を通り、可変利得増幅器1の制御電圧として印加される。制御電圧は、カップラ11を通過する信号の一部を電力検出器4で検出された電力をもとに制御部5で重みづけされ、電圧可変装置6により電力に応じた制御電圧が可変利得増幅器1に印加される。
上記のような動作により、増幅器2で発生した振幅歪み成分を除去することができる。
入力された変調波信号はカップラ10を通過し、可変利得増幅器1に向かう。カップラ10を通過する信号の一部は遅延回路7を通り、カップラ11へ向かう。可変利得増幅器1を通過した信号は増幅器2で変調波信号が増幅され、カップラ12を通過し、出力される。カップラ12を通過した信号の一部は可変減衰器9及び可変移相器8を通過し振幅比較器3へ向かう。この信号をフィードバック信号という。振幅比較器3では、カップラ11を通過した信号とフィードバック信号とを比較する。その際、遅延回路7でフィードバック信号との群遅延時間差を小さくし、可変減衰器9と可変移相器8でフィードバック信号の振幅と位相を調整している。振幅比較器3で比較した信号はフィードバック信号との電力差に応じて電圧を発生させる。発生した電圧は電圧可変装置6を通り、可変利得増幅器1の制御電圧として印加される。制御電圧は、カップラ11を通過する信号の一部を電力検出器4で検出された電力をもとに制御部5で重みづけされ、電圧可変装置6により電力に応じた制御電圧が可変利得増幅器1に印加される。
上記のような動作により、増幅器2で発生した振幅歪み成分を除去することができる。
歪み補償動作について、以下、更に詳細に説明する。
周波数帯域、入力電力及び温度のうち少なくともいずれかが異なっても、振幅比較器3で比較される信号の群遅延時間及び平均電力が揃っていれば、本発明の回路はなくても理想的に歪み補償をかけることができる。ところが、周波数帯域、入力電力及び温度の少なくともいずれかが異なると振幅比較器3で比較される信号の群遅延時間及び平均電力が異なってくる。元の信号よりフィードバック信号の平均電力が大きい場合は、可変利得増幅器1での振幅制御が過小になり、逆の場合は過大になるため、理想的に歪み補償をすることができない。図2の(a)は元の信号よりフィードバック信号の平均電力が大きい場合の変調波信号の時間波形をみたものである。実線が元の信号、破線がフィードバック信号である。わかりやすくするために、信号は歪ませていない。信号が歪んでいないということは振幅比較器3において元の信号とフィードバック信号の波形が一致していなければならない。この例では一致していないため、元の信号になるように振幅を小さくする方向に可変利得増幅器1を動作させる。元々、歪みは発生させていないので歪みが大きくなる方向に動作する。
周波数帯域、入力電力及び温度のうち少なくともいずれかが異なっても、振幅比較器3で比較される信号の群遅延時間及び平均電力が揃っていれば、本発明の回路はなくても理想的に歪み補償をかけることができる。ところが、周波数帯域、入力電力及び温度の少なくともいずれかが異なると振幅比較器3で比較される信号の群遅延時間及び平均電力が異なってくる。元の信号よりフィードバック信号の平均電力が大きい場合は、可変利得増幅器1での振幅制御が過小になり、逆の場合は過大になるため、理想的に歪み補償をすることができない。図2の(a)は元の信号よりフィードバック信号の平均電力が大きい場合の変調波信号の時間波形をみたものである。実線が元の信号、破線がフィードバック信号である。わかりやすくするために、信号は歪ませていない。信号が歪んでいないということは振幅比較器3において元の信号とフィードバック信号の波形が一致していなければならない。この例では一致していないため、元の信号になるように振幅を小さくする方向に可変利得増幅器1を動作させる。元々、歪みは発生させていないので歪みが大きくなる方向に動作する。
次に群遅延時間に対して説明する。元の信号よりフィードバック信号の群遅延時間が大きい場合も小さい場合も、時間軸上で信号を比較すると振幅がずれてみえてしまうため、可変利得増幅器1での振幅制御で誤った方向へ補償するため理想的に歪み補償をすることができない。図2の(b)は元の信号よりフィードバック信号の群遅延時間が大きい場合の変調波信号の時間波形をみたものである。平均電力は一定として、信号は増幅器2で歪ませていない。信号が歪んでいないということは振幅比較器3において元の信号とフィードバック信号の波形が一致していなければならない。この例では一致していないため、元の信号になるように振幅を大きくまたは小さくする方向に可変利得増幅器1を動作させる。元々歪みは発生させていないので歪みが大きくなる方向に動作する。
次に平均電力も群遅延時間も異なる場合を示す。図2の(c)は元の信号より平均電力が大きく、フィードバック信号の群遅延時間が大きい場合の変調波信号の時間波形をみたものである。同様にして元々歪みは発生させていないので歪みが大きくなる方向に動作することがわかる。
これを改善するため、通常は可変減衰器9と可変移相器8を用いて最適な点へ調整する。ところが、変調波帯域が広くなると周波数特性等により振幅比較器3において偏差が生じてしまう。
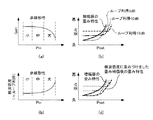
図3(a)に元の信号とフィードバック系の群遅延時間差であるループの群遅延時間差に対する歪み特性をループ利得15dB時の変調波帯域依存性を示す。変調波帯域が広がるほどに同じ時ループの群遅延時間差の場合、歪み特性が悪いことが分かる。このとき、信号の平均電力は一定で増幅器2で歪ませていない。したがって、ループの群遅延時間差と変調波帯域とループ利得から歪みの良し悪しが決定されている。図3(a)中の矢印のループの群遅延時間差時のスペクトルを図3(b)に示す。変調帯域が広がるにつれてフロアノイズが上昇していることが分かる。次に、図3(c)にループの群遅延時間差に対する歪み特性を変調帯域10MHz時のループ利得依存性を示す。ループ利得が下がるにつれて歪み特性が良くなることが分かる。このときも、信号は平均電力が一定で歪ませていない。図3(c)中の矢印のループの群遅延時間差時のスペクトルを図3(d)に示す。ループ利得が小さくなるにつれてフロアノイズが下降していることが分かる。
次に増幅器2の特性を図4(a)のように振幅特性を非線形にする。変調帯域10MHz場合の歪み補償なしの歪み特性を図4(b)に示す。図中には増幅器2の歪み特性と示している。これに対して、図3(c)の矢印の位置のループの群遅延時間をもったポーラループ歪み補償回路でループ利得を可変した場合の歪み特性を図4(b)に合わせて示す。ループ利得を大きくするほど出力電力(Pout)が大きい場合に改善効果があるが、出力電力が小さい場合ループ利得が小さい場合のほうが改善している。ループ利得が高い場合は、増幅器2単体の特性より悪化する場合もある。
そこで、本実施の形態では、ループ利得に入力電力依存性を持たせる。ループ利得とは可変利得増幅器1の感度A(dB/V)と振幅比較器3の検波感度B(V/dB)から決定される。図4(a)のような増幅器特性の場合、入力電力が小さい場合、非線形性は小さく、入力電力が大きくなると非線形性は大きくなる。ループ利得が大きくなるに従って理想的には歪みの改善は良くなるが、上記に示したように、ループの群遅延時間差が大きいと変調帯域依存性により、ノイズフロアが悪化する。そこで、カップラ11から取り出した一部の入力電力を電力検出器4で検出し、そのデータをもとに制御部5から電圧可変装置6に制御信号を送り、振幅比較器3から出力された検波電圧を制御して、入力電力に対して重みづけをした検波電圧を可変利得増幅器1に入力する。図4(c)に入力に対する検波感度依存性を示す。検波感度はループ利得と言い換えてもよい。図4(d)に増幅器2の歪み特性と検波感度に重みづけをした歪み補償後の歪み特性を示す。合わせて、図4(b)のループ利得依存性も示す。検波感度に重みづけをした歪み特性は、ループ利得依存性の良好な部分を用いているのが分かる。
以上のように、入力電力に対してループ利得(検波感度)に重みづけすることにより、変調帯域が広くなっても歪み特性を改善できる。
以上のように、入力電力に対してループ利得(検波感度)に重みづけすることにより、変調帯域が広くなっても歪み特性を改善できる。
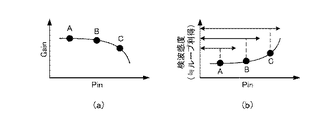
以下、入力電力に対してループ利得(検波感度)に重みづけする方法を図5を用いて更に詳細に説明する。カップラ10から入力された電力の一部はカップラ11で分波され、電力検出器4で平均電力として検出される。検出された信号の平均電力に応じて制御部5と電圧可変装置6により振幅比較器3で検出された電圧に入力電力に応じて重みづけを行う。例として図5(a)に示すように平均電力A,B,Cの場合について説明する。
平均電力Aの場合、入力電力は低く、増幅器2での線形性がよい。入力された変調波のPAPR(Peak to Average Power Ratio)の分だけ、平均電力より高い尖頭値をもち、尖頭値の一部が非線形領域にかかっている。このような場合、図5(b)に示すように、制御部5と電圧可変装置6により、検波感度を小さくし、結果的にループ利得を下げるように動作させる。図5(b)中のAに対応した矢印で示す範囲は平均電力Aのときに変調波電力が取り得る値を示している。このように平均電力Aのときにはほとんど検波感度が小さいままである。
次に平均電力がBの場合である。この場合、増幅器2での線形性は、平均電力B付近で悪化し始めている。ただし、平均電力より小さい電力時にはほとんど線形性が高い。このような場合、制御部5と電圧可変装置6により、平均電力より入力電力が小さい場合に検波感度を小さくし、平均電力より入力電力が大きい場合に検波感度を大きくすることで、線形性を改善しつつ、電力が小さいときにループ利得を上げないようにする(図5(b)中、Bに対応した矢印の範囲参照)。
次に平均電力がCの場合である。この場合、増幅器2での線形性は、平均電力C付近で悪化しており、さらに電力が大きくなるとさらに悪化する。このような場合、制御部5と電圧可変装置6により、平均電力より入力電力が小さい場合に有る程度、検波感度を小さくしつつ、平均電力より入力電力が大きい場合にさらに検波感度を大きくすることで、線形性を改善しつつ、電力が小さいときにループ利得を上げすぎないようにする(図5(b)中、Cに対応した矢印の範囲参照)。このようにすることで、図4(d)のように歪みを小さくすることのできる特性を得ることができる。
図6(a)に電圧可変装置6から出力される検波感度と電圧との関係を示す。ここで、振幅比較器3の検波感度は図6(b)に示す通り一定である。電圧可変装置6から出力される電圧は、平均電力Aに比べて平均電力B、さらに平均電力Cとなるほど大きくなっている。
なお、以上説明した例は一例であり、これ以外にも、電力検出器4をエンベロープ検出器に置き換え、動的に重みづけを変化させたり、LUT(Look up table)を用いて制御部5の処理を軽くしたり、重みづけ方法を多項式近似するなど、当業者が容易に推測できるものも範疇とする。
次に、実施の形態1において、入力電力の平均電力に対して検波感度を一意に決定する場合と検波感度を動的に変化させる場合について説明する。
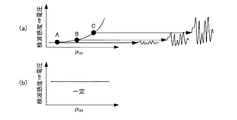
図7は、入力電力の平均電力に対して検波感度を一意に決定する場合の特性を示す説明図である。図7(b)では、群遅延時間差無しの0.2V/dBと、群遅延時間差がある場合の特性として、0.01V/dB〜0.2V/dBを示している。このような特性を用いて、検波感度を一意に決定する場合は、例えば、出力電力が区間701では検波感度を0.01V/dB、区間702では検波感度を0.02V/dB、区間703では検波感度を0.04V/dB、区間704では検波感度を0.1V/dB、区間705では検波感度を0.2V/dBとして一意に決定する。なお、横軸の出力電力は入力電力から換算した値である。また、図7(a)は、図7(b)中のA、B、C点と利得(Gain)との関係を示している。
図7は、入力電力の平均電力に対して検波感度を一意に決定する場合の特性を示す説明図である。図7(b)では、群遅延時間差無しの0.2V/dBと、群遅延時間差がある場合の特性として、0.01V/dB〜0.2V/dBを示している。このような特性を用いて、検波感度を一意に決定する場合は、例えば、出力電力が区間701では検波感度を0.01V/dB、区間702では検波感度を0.02V/dB、区間703では検波感度を0.04V/dB、区間704では検波感度を0.1V/dB、区間705では検波感度を0.2V/dBとして一意に決定する。なお、横軸の出力電力は入力電力から換算した値である。また、図7(a)は、図7(b)中のA、B、C点と利得(Gain)との関係を示している。
図8は、入力電力の平均電力に対して検波感度を動的に変化させる場合の特性を示す説明図である。例えば点Cについて説明すると、以下の通りである。
・入力電力が変調波であることから、振幅一定ではないので電力に幅をもつ→利得のグラフ(図8(a))の点Cにおいても矢印のように変動する。
・同じく入力電力が変調波であるので検波感度も幅を持つ→検波感度のグラフ(図8(b))の点Cにおいても矢印のように変動する(図8(c)に示すように、0.04V/dB〜0.2V/dB動いたとする)。
変調波は図2で示したように振幅が変化している、つまり電力が時間的に変動している。図2(c)の振幅が0.04V/dB〜0.2V/dBであるとした場合、その平均電力C(=利得のグラフ点C,検波感度のグラフ点C)は、時間的には常に電力が変化しており、その変化に応じて、検波感度が変化する。その重みづけが図8(b)に示されている特性である。
・入力電力が変調波であることから、振幅一定ではないので電力に幅をもつ→利得のグラフ(図8(a))の点Cにおいても矢印のように変動する。
・同じく入力電力が変調波であるので検波感度も幅を持つ→検波感度のグラフ(図8(b))の点Cにおいても矢印のように変動する(図8(c)に示すように、0.04V/dB〜0.2V/dB動いたとする)。
変調波は図2で示したように振幅が変化している、つまり電力が時間的に変動している。図2(c)の振幅が0.04V/dB〜0.2V/dBであるとした場合、その平均電力C(=利得のグラフ点C,検波感度のグラフ点C)は、時間的には常に電力が変化しており、その変化に応じて、検波感度が変化する。その重みづけが図8(b)に示されている特性である。
以上説明したように、実施の形態1のポーラループ歪み補償回路によれば、入力信号を増幅する増幅器と、増幅器の前段側に設けられ、増幅器で発生する振幅歪みを補償する可変利得増幅器と、増幅器からフィードバックした信号と入力信号の振幅を比較する振幅比較器と、振幅比較器から比較の結果として出力される電圧を調整する電圧可変装置と、入力信号の平均電力を検出する電力検出器と、電力検出器で検出した値に応じて電圧可変装置で調整される電圧の重みづけを行う制御部とを備え、可変利得増幅器は、電圧可変装置から出力された電圧を制御電圧として振幅歪みの補償を行うようにしたので、広帯域な信号に対しても振幅に関する歪み補償を良好に行うことができる。
また、実施の形態1のポーラループ歪み補償回路によれば、制御部は、入力される電力が高くなるにつれて検波感度を上げる特性とする重みづけを行うようにしたので、増幅器の特性が、入力電力が低いときは線形で入力電力が高くなると非線形性が大きくなる特性に対して良好に歪み補償を行うことができる。
また、実施の形態1のポーラループ歪み補償回路によれば、電力検出器をエンベロープ検出器としたので、エンベロープの時間的変動に追従しながら重みづけを行うことになり、このような構成でも動的に重みづけを行うことができる。
実施の形態2.
実施の形態1では、入力される平均電力が高くなるにつれて検波感度が上がる特性の重みづけを電圧可変装置6を用いて行ったが、振幅比較器3に予め検波感度の電力依存性を持たせ、この振幅比較器3への入力信号とフィードバック信号に対して制御することも可能であり、これを実施の形態2として以下に示す。
実施の形態1では、入力される平均電力が高くなるにつれて検波感度が上がる特性の重みづけを電圧可変装置6を用いて行ったが、振幅比較器3に予め検波感度の電力依存性を持たせ、この振幅比較器3への入力信号とフィードバック信号に対して制御することも可能であり、これを実施の形態2として以下に示す。
図9は、実施の形態2のポーラループ歪み補償回路を示す構成図である。
実施の形態2のポーラループ歪み補償回路は、可変利得増幅器1、増幅器2、振幅比較器3a、電力検出器4、制御部5a、遅延回路7、可変移相器8、可変減衰器9、カップラ10,11,12、可変利得器13を備えている。
振幅比較器3aは、検波感度の電力依存性を有している。図10はこの電力依存性を示す説明図である。制御部5aは電力検出器4からの出力に基づいて、可変減衰器9と可変利得器13とを制御し、振幅比較器3aへの入力電力を制御する。可変利得器13は、カップラ11と振幅比較器3aとの間に接続されて制御部5aによって制御され、振幅比較器3aへの入力電力を見かけ上変えるための可変利得器である。これ以外の構成は実施の形態1と同様である。
実施の形態2のポーラループ歪み補償回路は、可変利得増幅器1、増幅器2、振幅比較器3a、電力検出器4、制御部5a、遅延回路7、可変移相器8、可変減衰器9、カップラ10,11,12、可変利得器13を備えている。
振幅比較器3aは、検波感度の電力依存性を有している。図10はこの電力依存性を示す説明図である。制御部5aは電力検出器4からの出力に基づいて、可変減衰器9と可変利得器13とを制御し、振幅比較器3aへの入力電力を制御する。可変利得器13は、カップラ11と振幅比較器3aとの間に接続されて制御部5aによって制御され、振幅比較器3aへの入力電力を見かけ上変えるための可変利得器である。これ以外の構成は実施の形態1と同様である。
このように構成されたポーラループ歪み補償回路は、図10に示すように実施の形態1の電圧可変装置6からの出力と同様の出力を振幅比較器3aで得ることができる。
以上説明したように、実施の形態2のポーラループ歪み補償回路によれば、入力信号を増幅する増幅器と、増幅器の前段側に設けられ、増幅器で発生する振幅歪みを補償する可変利得増幅器と、入力される電力が高くなるにつれて検波感度が上がる特性を有し、増幅器からフィードバックした信号と入力信号の振幅を比較する振幅比較器と、入力信号の平均電力を検波する電力検出器と、電力検出器で検出した電力に応じて振幅比較器への入力信号とフィードバックした信号とを制御するための制御信号を送出する制御部とを備え、可変利得増幅器は、振幅比較器から出力された電圧を制御電圧として振幅歪みの補償を行うようにしたので、広帯域な信号に対しても振幅に関する歪み補償を良好に行うことができる。
実施の形態3.
図11は実施の形態3におけるポーラループ歪み補償回路を示す構成図である。実施の形態3のポーラループ歪み補償回路は、増幅器2、電力検出器4、制御部5、電圧可変装置6、遅延回路7、可変移相器8、可変減衰器9、カップラ10,11,12、可変移相器14、位相比較器15を備えている。可変移相器14は、電圧可変装置6から出力される制御電圧に基づいて増幅器2で発生する位相歪みを補償するための回路である。位相比較器15は、実施の形態1の振幅比較器3の振幅比較と同様に、フィードバック信号の位相と入力信号の位相比較を行う回路である。その他の構成は、実施の形態1と同様であるため、対応する部分に同一符号を付してその説明を省略する。
図11は実施の形態3におけるポーラループ歪み補償回路を示す構成図である。実施の形態3のポーラループ歪み補償回路は、増幅器2、電力検出器4、制御部5、電圧可変装置6、遅延回路7、可変移相器8、可変減衰器9、カップラ10,11,12、可変移相器14、位相比較器15を備えている。可変移相器14は、電圧可変装置6から出力される制御電圧に基づいて増幅器2で発生する位相歪みを補償するための回路である。位相比較器15は、実施の形態1の振幅比較器3の振幅比較と同様に、フィードバック信号の位相と入力信号の位相比較を行う回路である。その他の構成は、実施の形態1と同様であるため、対応する部分に同一符号を付してその説明を省略する。
次に、実施の形態3のポーラループ歪み補償回路の動作について説明する。
入力された変調波信号はカップラ10を通過し、可変移相器14に向かう。カップラ10を通過する信号の一部は遅延回路7を通り、カップラ11へ向かう。可変移相器14を通過した信号は増幅器2で変調波信号が増幅され、カップラ12を通過し、出力される。カップラ12を通過した信号の一部は可変減衰器9及び可変移相器8を通過し、位相比較器15へ向かう。この信号をフィードバック信号という。位相比較器15では、カップラ11を通過した信号とフィードバック信号を比較する。その際に遅延回路7でフィードバック信号との群遅延時間差を小さくし、可変減衰器9と可変移相器8でフィードバック信号の振幅と位相を調整している。位相比較器15で比較した信号はフィードバック信号との電力差に応じて電圧を発生させる。発生した電圧は電圧可変装置6を通り、可変移相器14の制御電圧として印加される。制御電圧は、カップラ11を通過する信号の一部を電力検出器4で検出された電力をもとに制御部5で重みづけされ、電圧可変装置6により電力に応じた制御電圧が可変移相器14に印加される。
以上の動作により、増幅器2で発生した位相歪み成分を除去することができる。
入力された変調波信号はカップラ10を通過し、可変移相器14に向かう。カップラ10を通過する信号の一部は遅延回路7を通り、カップラ11へ向かう。可変移相器14を通過した信号は増幅器2で変調波信号が増幅され、カップラ12を通過し、出力される。カップラ12を通過した信号の一部は可変減衰器9及び可変移相器8を通過し、位相比較器15へ向かう。この信号をフィードバック信号という。位相比較器15では、カップラ11を通過した信号とフィードバック信号を比較する。その際に遅延回路7でフィードバック信号との群遅延時間差を小さくし、可変減衰器9と可変移相器8でフィードバック信号の振幅と位相を調整している。位相比較器15で比較した信号はフィードバック信号との電力差に応じて電圧を発生させる。発生した電圧は電圧可変装置6を通り、可変移相器14の制御電圧として印加される。制御電圧は、カップラ11を通過する信号の一部を電力検出器4で検出された電力をもとに制御部5で重みづけされ、電圧可変装置6により電力に応じた制御電圧が可変移相器14に印加される。
以上の動作により、増幅器2で発生した位相歪み成分を除去することができる。
詳細な動作原理は実施の形態1の振幅を位相に置き換えたものと同じである。例えば、実施の形態1の図4及び図5に相当する図面を図12及び図13として示す。図12(a)に示すように、増幅器2の位相特性は非線形となっている。基本的な動作としては、図4及び図5における振幅が位相に置き換わっているだけであるため、ここでの詳細な説明は省略する。
なお、実施の形態3では、実施の形態1における構成で振幅を位相に置き換えた例を説明したが、実施の形態2の構成で振幅を位相に置き換えた構成でも同様に適用可能である。すなわち、この場合は実施の形態2の可変利得増幅器1が可変移相器14に、振幅比較器3aが位相比較器15となる。
以上説明したように、実施の形態3のポーラループ歪み補償回路によれば、入力信号を増幅する増幅器と、増幅器の前段側に設けられ、増幅器で発生する位相歪みを補償する可変移相器と、増幅器からフィードバックした信号と入力信号の位相を比較する位相比較器と、位相比較器から比較の結果として出力される電圧を調整する電圧可変装置と、入力信号の平均電力を検出する電力検出器と、電力検出器で検出した値に応じて電圧可変装置で調整される電圧の重みづけを行う制御部とを備え、可変移相器は、電圧可変装置から出力された電圧を制御電圧として位相歪みの補償を行うようにしたので、広帯域な信号に対しても位相に関する歪み補償を良好に行うことができる。
また、実施の形態3のポーラループ歪み補償回路によれば、入力信号を増幅する増幅器と、増幅器の前段側に設けられ、増幅器で発生する位相歪みを補償する可変移相器と、入力される電力が高くなるにつれて検波感度が上がる特性を有し、増幅器からフィードバックした信号と入力信号の位相を比較する位相比較器と、入力信号の平均電力を検波する電力検出器と、電力検出器で検出した電力に応じて位相比較器への入力信号とフィードバックした信号とを制御するための制御信号を送出する制御部とを備え、可変移相器は、位相比較器から出力された電圧を制御電圧として位相歪みの補償を行うようにしたので、広帯域な信号に対しても位相に関する歪み補償を良好に行うことができる。
実施の形態4.
図14は、実施の形態4におけるポーラループ歪み補償回路を示す構成図である。実施の形態4のポーラループ歪み補償回路は、実施の形態1と実施の形態3の構成を備えたものであり、可変利得増幅器1、増幅器2、振幅比較器3、電力検出器4、制御部5、第1の電圧可変装置6a、第2の電圧可変装置6b、遅延回路7、可変移相器8、可変減衰器9、カップラ10,11,12、可変移相器14、位相比較器15を備えている。第1の電圧可変装置6aは、実施の形態1の電圧可変装置6に相当し、振幅比較器3の出力を制御部5によって重みづけされた調整電圧とする回路である。第2の電圧可変装置6bは、実施の形態3の電圧可変装置6に相当し、位相比較器15の出力を制御部5によって重みづけされた調整電圧とする回路である。その他の構成は、図1または図11に示した構成と同様である。
図14は、実施の形態4におけるポーラループ歪み補償回路を示す構成図である。実施の形態4のポーラループ歪み補償回路は、実施の形態1と実施の形態3の構成を備えたものであり、可変利得増幅器1、増幅器2、振幅比較器3、電力検出器4、制御部5、第1の電圧可変装置6a、第2の電圧可変装置6b、遅延回路7、可変移相器8、可変減衰器9、カップラ10,11,12、可変移相器14、位相比較器15を備えている。第1の電圧可変装置6aは、実施の形態1の電圧可変装置6に相当し、振幅比較器3の出力を制御部5によって重みづけされた調整電圧とする回路である。第2の電圧可変装置6bは、実施の形態3の電圧可変装置6に相当し、位相比較器15の出力を制御部5によって重みづけされた調整電圧とする回路である。その他の構成は、図1または図11に示した構成と同様である。
実施の形態4の動作については、実施の形態1で説明した歪み補償動作と、実施の形態3で説明した歪み補償動作の両方の動作を行うものであるが、それぞれの動作は実施の形態1,3と同様であるため、ここでの説明は省略する。
なお、実施の形態4においても、実施の形態2の構成を用いて、振幅と位相の両方の歪み補償を行う構成としてもよい。
以上説明したように、実施の形態4のポーラループ歪み補償回路によれば、入力信号を増幅する増幅器と、増幅器の前段側に設けられ、増幅器で発生する振幅歪みを補償する可変利得増幅器と、増幅器の前段側に設けられ、増幅器で発生する位相歪みを補償する可変移相器と、増幅器からフィードバックした信号と入力信号の振幅を比較する振幅比較器と、増幅器からフィードバックした信号と入力信号の位相を比較する位相比較器と、振幅比較器から比較の結果として出力される電圧を調整する第1の電圧可変装置と、位相比較器から比較の結果として出力される電圧を調整する第2の電圧可変装置と、入力信号の平均電力を検出する電力検出器と、電力検出器で検出した値に応じて第1及び第2の電圧可変装置で調整される電圧の重みづけを行う制御部とを備え、可変利得増幅器は、第1の電圧可変装置から出力された電圧を制御電圧として振幅歪みの補償を行い、可変移相器は、第2の電圧可変装置から出力された電圧を制御電圧として位相歪みの補償を行うようにしたので、広帯域な信号に対しても振幅と位相に関する歪み補償を良好に行うことができる。
また、実施の形態4のポーラループ歪み補償回路によれば、入力信号を増幅する増幅器と、増幅器の前段側に設けられ、増幅器で発生する振幅歪みを補償する可変利得増幅器と、増幅器の前段側に設けられ、増幅器で発生する位相歪みを補償する可変移相器と、入力される電力が高くなるにつれて検波感度が上がる特性を有し、増幅器からフィードバックした信号と入力信号の振幅を比較する振幅比較器と、入力される電力が高くなるにつれて検波感度が上がる特性を有し、増幅器からフィードバックした信号と入力信号の位相を比較する位相比較器と、入力信号の平均電力を検波する電力検出器と、電力検出器で検出した電力に応じて振幅比較器及び位相比較器への入力信号とフィードバックした信号とを制御するための制御信号を送出する制御部とを備え、可変利得増幅器は、振幅比較器から出力された電圧を制御電圧として振幅歪みの補償を行い、可変移相器は、位相比較器から出力された電圧を制御電圧として位相歪みの補償を行うようにしたので、広帯域な信号に対しても振幅と位相に関する歪み補償を良好に行うことができる。
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
1 可変利得増幅器、2 増幅器、3,3a 振幅比較器、4 電力検出器、5,5a 制御部、6 電圧可変装置、6a 第1の電圧可変装置、6b 第2の電圧可変装置、7 遅延回路、8 可変移相器、9 可変減衰器、10,11,12 カップラ、13 可変利得器、14 可変移相器、15 位相比較器。
Claims (8)
- 入力信号を増幅する増幅器と、
前記増幅器の前段側に設けられ、前記増幅器で発生する振幅歪みを補償する可変利得増幅器と、
前記増幅器からフィードバックした信号と前記入力信号の振幅を比較する振幅比較器と、
前記振幅比較器から前記比較の結果として出力される電圧を調整する電圧可変装置と、
前記入力信号の平均電力を検出する電力検出器と、
前記電力検出器で検出した値に応じて前記電圧可変装置で調整される電圧の重みづけを行う制御部とを備え、
前記可変利得増幅器は、前記電圧可変装置から出力された電圧を制御電圧として前記振幅歪みの補償を行うことを特徴とするポーラループ歪み補償回路。 - 入力信号を増幅する増幅器と、
前記増幅器の前段側に設けられ、前記増幅器で発生する振幅歪みを補償する可変利得増幅器と、
入力される電力が高くなるにつれて検波感度が上がる特性を有し、前記増幅器からフィードバックした信号と前記入力信号の振幅を比較する振幅比較器と、
前記入力信号の平均電力を検波する電力検出器と、
前記電力検出器で検出した電力に応じて前記振幅比較器への入力信号と前記フィードバックした信号とを制御するための制御信号を送出する制御部とを備え、
前記可変利得増幅器は、前記振幅比較器から出力された電圧を制御電圧として前記振幅歪みの補償を行うことを特徴とするポーラループ歪み補償回路。 - 入力信号を増幅する増幅器と、
前記増幅器の前段側に設けられ、前記増幅器で発生する位相歪みを補償する可変移相器と、
前記増幅器からフィードバックした信号と前記入力信号の位相を比較する位相比較器と、
前記位相比較器から前記比較の結果として出力される電圧を調整する電圧可変装置と、
前記入力信号の平均電力を検出する電力検出器と、
前記電力検出器で検出した値に応じて前記電圧可変装置で調整される電圧の重みづけを行う制御部とを備え、
前記可変移相器は、前記電圧可変装置から出力された電圧を制御電圧として前記位相歪みの補償を行うことを特徴とするポーラループ歪み補償回路。 - 入力信号を増幅する増幅器と、
前記増幅器の前段側に設けられ、前記増幅器で発生する位相歪みを補償する可変移相器と、
入力される電力が高くなるにつれて検波感度が上がる特性を有し、前記増幅器からフィードバックした信号と前記入力信号の位相を比較する位相比較器と、
前記入力信号の平均電力を検波する電力検出器と、
前記電力検出器で検出した電力に応じて前記位相比較器への入力信号と前記フィードバックした信号とを制御するための制御信号を送出する制御部とを備え、
前記可変移相器は、前記位相比較器から出力された電圧を制御電圧として前記位相歪みの補償を行うことを特徴とするポーラループ歪み補償回路。 - 入力信号を増幅する増幅器と、
前記増幅器の前段側に設けられ、前記増幅器で発生する振幅歪みを補償する可変利得増幅器と、
前記増幅器の前段側に設けられ、前記増幅器で発生する位相歪みを補償する可変移相器と、
前記増幅器からフィードバックした信号と前記入力信号の振幅を比較する振幅比較器と、
前記増幅器からフィードバックした信号と前記入力信号の位相を比較する位相比較器と、
前記振幅比較器から前記比較の結果として出力される電圧を調整する第1の電圧可変装置と、
前記位相比較器から前記比較の結果として出力される電圧を調整する第2の電圧可変装置と、
前記入力信号の平均電力を検出する電力検出器と、
前記電力検出器で検出した値に応じて前記第1及び第2の電圧可変装置で調整される電圧の重みづけを行う制御部とを備え、
前記可変利得増幅器は、前記第1の電圧可変装置から出力された電圧を制御電圧として前記振幅歪みの補償を行い、前記可変移相器は、前記第2の電圧可変装置から出力された電圧を制御電圧として前記位相歪みの補償を行うことを特徴とするポーラループ歪み補償回路。 - 入力信号を増幅する増幅器と、
前記増幅器の前段側に設けられ、前記増幅器で発生する振幅歪みを補償する可変利得増幅器と、
前記増幅器の前段側に設けられ、前記増幅器で発生する位相歪みを補償する可変移相器と、
入力される電力が高くなるにつれて検波感度が上がる特性を有し、前記増幅器からフィードバックした信号と前記入力信号の振幅を比較する振幅比較器と、
入力される電力が高くなるにつれて検波感度が上がる特性を有し、前記増幅器からフィードバックした信号と前記入力信号の位相を比較する位相比較器と、
前記入力信号の平均電力を検波する電力検出器と、
前記電力検出器で検出した電力に応じて前記振幅比較器及び前記位相比較器への入力信号と前記フィードバックした信号とを制御するための制御信号を送出する制御部とを備え、
前記可変利得増幅器は、前記振幅比較器から出力された電圧を制御電圧として前記振幅歪みの補償を行い、前記可変移相器は、前記位相比較器から出力された電圧を制御電圧として前記位相歪みの補償を行うことを特徴とするポーラループ歪み補償回路。 - 前記制御部は、入力される電力が高くなるにつれて検波感度を上げる特性とする重みづけを行うことを特徴とする請求項1、請求項3、または請求項5のうちのいずれか1項記載のポーラループ歪み補償回路。
- 前記電力検出器は、エンベロープ検出器であることを特徴とする請求項1から請求項7のうちのいずれか1項記載のポーラループ歪み補償回路。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014233691A JP2016100629A (ja) | 2014-11-18 | 2014-11-18 | ポーラループ歪み補償回路 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014233691A JP2016100629A (ja) | 2014-11-18 | 2014-11-18 | ポーラループ歪み補償回路 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016100629A true JP2016100629A (ja) | 2016-05-30 |
Family
ID=56077546
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014233691A Pending JP2016100629A (ja) | 2014-11-18 | 2014-11-18 | ポーラループ歪み補償回路 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016100629A (ja) |
-
2014
- 2014-11-18 JP JP2014233691A patent/JP2016100629A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104300915B (zh) | 利用自适应包络跟踪的系统和方法 | |
| JP3772031B2 (ja) | 増幅器のプリディストータと増幅装置 | |
| US7561636B2 (en) | Digital predistortion apparatus and method in power amplifier | |
| JP5742186B2 (ja) | 増幅装置 | |
| US7456688B2 (en) | Signal extraction circuit and distortion-compensated amplifier incorporating the same | |
| AU2007211189B2 (en) | Supply voltage control for a power amplifier | |
| JP3850649B2 (ja) | 歪補償増幅器 | |
| US7330073B2 (en) | Arbitrary waveform predistortion table generation | |
| US6833758B2 (en) | Power amplifier | |
| WO2011086752A1 (ja) | 増幅装置及び信号処理装置 | |
| JP2002076785A (ja) | 歪補償装置 | |
| JP2009273110A (ja) | ポーラ変調送信装置及びポーラ変調送信方法 | |
| US20080068191A1 (en) | Amplifier failure detection apparatus | |
| JP5124655B2 (ja) | 歪補償増幅器 | |
| JP2015026968A (ja) | 歪補償装置および歪補償方法 | |
| JP6098178B2 (ja) | 増幅装置、歪補償装置および歪補償方法 | |
| US10979001B2 (en) | Method and system for linearizing an amplifier using transistor-level dynamic feedback | |
| JP5049562B2 (ja) | 電力増幅器 | |
| JP5441817B2 (ja) | 送信回路及び送信方法 | |
| JP4700623B2 (ja) | 電子回路 | |
| JP2016100629A (ja) | ポーラループ歪み補償回路 | |
| US12424993B2 (en) | Amplifier and amplification method | |
| JP6056956B2 (ja) | 通信装置及びその歪み抑制方法 | |
| WO2015052803A1 (ja) | 電力増幅器 | |
| JP5795218B2 (ja) | Et電力増幅装置 |