JP2016107003A - 医用画像処理装置及びその作動方法 - Google Patents
医用画像処理装置及びその作動方法 Download PDFInfo
- Publication number
- JP2016107003A JP2016107003A JP2014250227A JP2014250227A JP2016107003A JP 2016107003 A JP2016107003 A JP 2016107003A JP 2014250227 A JP2014250227 A JP 2014250227A JP 2014250227 A JP2014250227 A JP 2014250227A JP 2016107003 A JP2016107003 A JP 2016107003A
- Authority
- JP
- Japan
- Prior art keywords
- range
- angle
- radius
- radial
- image signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/90—Determination of colour characteristics
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus, e.g. for MRI, optical tomography or impedance tomography apparatus; Arrangements of imaging apparatus in a room
- A61B5/004—Features or image-related aspects of imaging apparatus, e.g. for MRI, optical tomography or impedance tomography apparatus; Arrangements of imaging apparatus in a room adapted for image acquisition of a particular organ or body part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/42—Detecting, measuring or recording for evaluating the gastrointestinal, the endocrine or the exocrine systems
- A61B5/4222—Evaluating particular parts, e.g. particular organs
- A61B5/4238—Evaluating particular parts, e.g. particular organs stomach
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6886—Monitoring or controlling distance between sensor and tissue
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30092—Stomach; Gastric
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30096—Tumor; Lesion
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Pathology (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Quality & Reliability (AREA)
- Endocrinology (AREA)
- Physiology (AREA)
- Gastroenterology & Hepatology (AREA)
- Endoscopes (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Geometry (AREA)
Abstract
Description
図1に示すように、第1A実施形態の内視鏡システム10は、内視鏡12と、光源装置14と、プロセッサ装置16と、モニタ18と、コンソール19とを有する。内視鏡12は光源装置14と光学的に接続されるとともに、プロセッサ装置16と電気的に接続される。内視鏡12は、被検体内に挿入される挿入部12aと、挿入部12aの基端部分に設けられた操作部12bと、挿入部12aの先端側に設けられる湾曲部12c及び先端部12dを有している。操作部12bのアングルノブ12eを操作することにより、湾曲部12cは湾曲動作する。この湾曲動作に伴って、先端部12dが所望の方向に向けられる。
(E1):R*=第2R画像信号の画素値×Yin/Yout
(E2):G*=第2G画像信号の画素値×Yin/Yout
(E3):B*=第2B画像信号の画素値×Yin/Yout
なお、「R*」は明るさ調整後の第2R画像信号を、「G*」は明るさ調整後の第2G画像信号を、「B*」は明るさ調整後の第2B画像信号を表している。また、「kr」、「kg」、「kb」は「0」〜「1」の範囲にある任意の定数である。
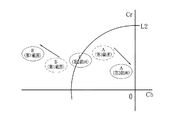
上記第1A実施形態では、信号比算出部72で第1RGB画像信号からB/G比、G/R比を求め、これらB/G比、G/R比から形成される特徴空間において角度等倍処理、角度拡張又は収縮処理、動径等倍処理、及び動径拡張又は収縮処理を行っているが、第1B実施形態では、色情報として色差信号Cr、Cbを求め、色差信号Cr、Cbから形成される特徴空間において角度等倍処理、角度拡張又は収縮処理、動径等倍処理、及び動径拡張又は収縮処理を行う。
第1C実施形態では、第1RGB画像信号をLab変換部(本発明の「色情報取得部」に対応する)でLab変換してa*、b*(色情報であるCIE Lab空間の色味の要素a*、b*を表す。以下同様)を取得し、これらa*、b*から形成される特徴空間(ab空間)において、角度等倍処理、角度拡張又は収縮処理、動径等倍処理、動径拡張又は収縮処理を行う。なお、CIE Labとは、CIE(国際照明委員会)が定める表色系のことをいう。
第2実施形態では、第1実施形態で示した4色のLED20a〜20dの代わりに、レーザ光源と蛍光体を用いて観察対象の照明を行う。それ以外については、第1実施形態と同様である。
第3実施形態では、第1実施形態で示した4色のLED20a〜20dの代わりに、キセノンランプなどの広帯域光源と回転フィルタを用いて観察対象の照明を行う。また、カラーの撮像センサ48に代えて、モノクロの撮像センサで観察対象の撮像を行う。それ以外については、第1実施形態と同様である。
第4実施形態では、挿入型の内視鏡12及び光源装置14に代えて、飲み込み式のカプセル内視鏡を用いて、通常画像又は特殊画像の生成に必要なRGB画像信号を取得する。
72 信号比算出部(色情報取得部)
74 角度調整部
75 動径調整部
77 RGB変換部(カラー画像信号変換部)
81 明るさ調整部
85 輝度・色差信号変換部(色情報取得部)
Claims (15)
- 第1カラー画像信号を入力処理する画像信号入力処理部と、
前記第1カラー画像信号から複数の色情報を取得する色情報取得部と、
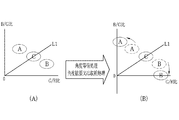
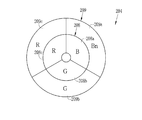
前記複数の色情報で形成される特徴空間において、観察対象である第1範囲、第2範囲、及び第3範囲のうち前記第2範囲を通る第1基準線を含む一定の範囲R1x内の角度を、角度変化率W1xに基づいて、等倍する角度等倍処理と、前記範囲R1xの範囲外となる範囲R1y内の角度を、前記角度変化率W1xよりも大きい又は小さい角度変化率W1yで変化させる角度拡張又は収縮処理とを行う角度調整部と、
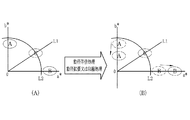
前記第2範囲を通り、且つ前記第1基準線と交差する第2基準線を含む一定の範囲R2x内の動径を、動径変化率W2xに基づいて、等倍する動径等倍処理と、前記範囲R2xの範囲外となる範囲R2yの動径を、前記動径変化率W2xよりも大きい又は小さい動径変化率W2yで変化させる動径拡張又は収縮処理とを行う動径調整部と、
を備える医用画像処理装置。 - 前記角度変化率W1x及び前記動径変化率W2xは1.0倍である請求項1記載の医用画像処理装置。
- 前記角度拡張又は収縮処理は、前記範囲R1yのうち前記第1基準線の一方側にある範囲の角度と他方側にある範囲の角度を、角度方向に対して、それぞれ前記第1基準線から離れるように変化させる請求項1または2記載の医用画像処理装置。
- 前記第1基準線に対する角度をθとし、前記第1基準線に対して一方側の角度θをプラスの角度とし、前記第1基準線に対して他方側の角度θをマイナスの角度としたときに、
前記範囲R1xは、角度θが、「0」よりも小さい「−θ1」から、「0」よりも大きい「+θ2」までの範囲であり、前記範囲R1xにおいて、前記角度等倍処理前の角度θと前記角度等倍処理後の角度θとは等しく、
前記範囲R1yは、角度θが、「−θ1」よりも小さい「−θ3」から、「−θ1」までの角度マイナス範囲と、「θ2」から、「θ2」よりも大きい「θ4」までの角度プラス範囲から構成され、前記角度マイナス範囲において、前記角度拡張又は収縮処理前の角度θは前記角度拡張又は収縮処理後の角度θよりも小さくなり、前記角度プラス範囲において、前記角度拡張又は収縮処理前の角度θは前記角度拡張又は収縮処理後の角度θよりも大きくなる請求項1ないし3いずれか1項記載の医用画像処理装置。 - 前記角度調整部は、前記角度θが「θ4」よりも大きい場合、又は、前記角度が「−θ3」よりも小さい場合には、角度変化率W1xに基づいて、前記角度θを等倍する請求項4記載の医用画像処理装置。
- 前記動径拡張又は収縮処理は、前記範囲R2yのうち前記第2基準線の一方側にある範囲の角度と他方側にある範囲の動径を、動径方向に対して、それぞれ前記第2基準線から離れるように変化させる請求項1ないし5いずれか1項記載の医用画像処理装置。
- 前記第1基準線に対応する動径rを動径rcとしたときに、
前記範囲R2xは、動径rが、「rc」よりも小さい「r1」から、「rc」よりも大きい「r2」までの範囲であり、前記範囲R2xにおいて、前記動径等倍処理前の動径rと前記動径等倍処理後の動径rとは等しく、
前記範囲R2yは、動径rが、「r1」よりも小さい「r3」から、「r1」までの小動径範囲と、「r2」から、「r2」よりも大きい「r4」までの大動径範囲から構成され、前記小動径範囲において、前記動径拡張又は収縮処理前の動径rは前記動径拡張又は収縮処理後の動径rよりも小さくなり、前記大動径範囲において、前記動径拡張又は収縮処理前の動径rは前記動径拡張又は収縮処理後の動径rよりも大きくなる請求項1ないし6いずれか1項記載の医用画像処理装置。 - 前記動径調整部は、前記動径rが「r4」よりも大きい場合、又は、前記動径rが「r3」よりも小さい場合には、動径変化率W2xに基づいて、前記動径rを等倍する請求項7記載の医用画像処理装置。
- 前記第1基準線に対して一方側に前記第1範囲があり、他方側に前記第3範囲がある請求項1ないし8いずれか1項記載の医用画像処理装置。
- 前記第2基準線に対して一方側に前記第1範囲があり、他方側に前記第3範囲がある請求項1ないし9いずれか1項記載の医用画像処理装置。
- 前記第1カラー画像信号は3色の画像信号であり、前記複数の色情報は、前記3色の画像信号のうち2色の画像信号間の第1信号比と、前記第1信号比と異なる2色の画像信号間の第2信号比であり、前記特徴空間は前記第1信号比と前記第2信号比で形成される信号比空間である請求項1ないし10いずれか1項記載の医用画像処理装置。
- 前記特徴空間は、前記複数の色情報である色差信号Cr、Cbで形成されるCbCr空間、又は、前記複数の色情報であるCIE Lab空間の色味の要素a*、b*で形成されるab空間のいずれかである請求項1ないし10いずれか1項記載の医用画像処理装置。
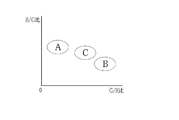
- 前記角度等倍処理、前記角度拡張又は収縮処理、前記動径等倍処理、及び前記動径拡張又は収縮処理によって、前記第2範囲は、H(色相)と彩度(S)からなるHS空間における位置を維持し、前記第1範囲と前記第3範囲は、前記HS空間において、色相方向と彩度方法に対してそれぞれ異なる方向に移動する請求項1ないし12いずれか1項記載の医用画像処理装置。
- 前記角度等倍処理、前記角度拡張又は収縮処理、前記動径等倍処理、及び前記動径拡張又は収縮処理を行った後の複数の色情報を第2カラー画像信号に変換するカラー画像信号変換部と、
前記第1カラー画像信号から得られる第1明るさ情報及び前記第2カラー画像信号から得られる第2明るさ情報から、前記第2カラー画像信号の画素値を調整する明るさ調整部とを有する請求項1ないし13いずれか1項記載の医用画像処理装置。 - 画像信号入力処理部が、第1カラー画像信号を入力処理するステップと、
色情報取得部が、前記第1カラー画像信号から複数の色情報を取得するステップと、
角度調整部が、前記複数の色情報で形成される特徴空間において、観察対象である第1範囲、第2範囲、及び第3範囲のうち前記第2範囲を通る第1基準線を含む一定の範囲R1x内の角度を、角度変化率W1xに基づいて、等倍する角度等倍処理と、前記範囲R1xの範囲外となる範囲R1y内の角度を、前記角度変化率W1xよりも大きい又は小さい角度変化率W1yで変化させる角度拡張又は収縮処理とを行うステップと、
動径調整部が、前記第2範囲を通り、且つ前記第1基準線と交差する第2基準線を含む一定の範囲R2x内の動径を、動径変化率W2xに基づいて、等倍する動径等倍処理と、前記範囲R2xの範囲外となる範囲R2y内の動径を、前記動径変化率W2xよりも大きい又は小さい動径変化率W2yで変化させる動径拡張又は収縮処理とを行うステップと、
を備える医用画像処理装置の作動方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014250227A JP2016107003A (ja) | 2014-12-10 | 2014-12-10 | 医用画像処理装置及びその作動方法 |
| US14/963,776 US9734592B2 (en) | 2014-12-10 | 2015-12-09 | Medical image processing device and method for operating the same |
| CN201510900983.9A CN105701792A (zh) | 2014-12-10 | 2015-12-09 | 医用图像处理装置以及其工作方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014250227A JP2016107003A (ja) | 2014-12-10 | 2014-12-10 | 医用画像処理装置及びその作動方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016107003A true JP2016107003A (ja) | 2016-06-20 |
Family
ID=56111659
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014250227A Pending JP2016107003A (ja) | 2014-12-10 | 2014-12-10 | 医用画像処理装置及びその作動方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9734592B2 (ja) |
| JP (1) | JP2016107003A (ja) |
| CN (1) | CN105701792A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018181156A1 (ja) * | 2017-03-31 | 2018-10-04 | Hoya株式会社 | 電子内視鏡システム |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6461739B2 (ja) * | 2015-07-28 | 2019-01-30 | 富士フイルム株式会社 | 画像処理装置及び内視鏡システム並びに画像処理装置の作動方法 |
| CN107677641A (zh) * | 2017-09-29 | 2018-02-09 | 南京科兴新材料科技有限公司 | 一种幽门螺杆菌诊断器 |
| CN108670203A (zh) * | 2018-06-01 | 2018-10-19 | 深圳开立生物医疗科技股份有限公司 | 一种成像设备 |
| CN109567757B (zh) * | 2018-12-29 | 2020-01-21 | 深圳普门科技股份有限公司 | 一种基于颜色检测的Hp微型检测治疗一体胶囊 |
| WO2021060158A1 (ja) * | 2019-09-24 | 2021-04-01 | 富士フイルム株式会社 | 内視鏡システム及びその作動方法 |
| WO2024137308A1 (en) * | 2022-12-21 | 2024-06-27 | Stryker Corporation | Systems and methods for low-light image enhancement |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013111420A (ja) * | 2011-11-30 | 2013-06-10 | Olympus Corp | 画像処理装置、画像処理方法、及び画像処理プログラム |
| WO2014156937A1 (ja) * | 2013-03-27 | 2014-10-02 | 富士フイルム株式会社 | 画像処理装置及び内視鏡システムの作動方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5550582A (en) * | 1993-03-19 | 1996-08-27 | Olympus Optical Co., Ltd. | Endoscope-image processing apparatus for performing image processing of emphasis in endoscope image by pigment concentration distribution |
| JP2003220019A (ja) | 1999-05-26 | 2003-08-05 | Olympus Optical Co Ltd | 画像診断装置及び内視鏡装置 |
| US8111286B2 (en) * | 2006-09-28 | 2012-02-07 | Fujifilm Corporation | Image processing apparatus, endoscope, and computer readable medium |
| JP2010187756A (ja) * | 2009-02-16 | 2010-09-02 | Olympus Corp | 画像処理装置、画像処理方法および画像処理プログラム |
| JP5597429B2 (ja) * | 2010-03-31 | 2014-10-01 | 富士フイルム株式会社 | 医用画像処理装置および方法、並びにプログラム |
| US8502154B2 (en) * | 2011-04-21 | 2013-08-06 | Kabushiki Kaisha Toshiba | Method and system for organ specific PET imaging |
| JP5830295B2 (ja) * | 2011-07-29 | 2015-12-09 | オリンパス株式会社 | 画像処理装置、画像処理装置の作動方法、及び画像処理プログラム |
| JP5647752B1 (ja) * | 2013-03-27 | 2015-01-07 | 富士フイルム株式会社 | 画像処理装置及び内視鏡システムの作動方法 |
| JP5932894B2 (ja) * | 2014-03-24 | 2016-06-08 | 富士フイルム株式会社 | 医用画像処理装置及びその作動方法 |
| JP6121368B2 (ja) * | 2014-06-27 | 2017-04-26 | 富士フイルム株式会社 | 医用画像処理装置及びその作動方法並びに内視鏡システム |
| JP6461739B2 (ja) * | 2015-07-28 | 2019-01-30 | 富士フイルム株式会社 | 画像処理装置及び内視鏡システム並びに画像処理装置の作動方法 |
-
2014
- 2014-12-10 JP JP2014250227A patent/JP2016107003A/ja active Pending
-
2015
- 2015-12-09 CN CN201510900983.9A patent/CN105701792A/zh active Pending
- 2015-12-09 US US14/963,776 patent/US9734592B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013111420A (ja) * | 2011-11-30 | 2013-06-10 | Olympus Corp | 画像処理装置、画像処理方法、及び画像処理プログラム |
| US20140270377A1 (en) * | 2011-11-30 | 2014-09-18 | Olympus Corporation | Image processing apparatus, image processing method, and computer-readable recording device |
| WO2014156937A1 (ja) * | 2013-03-27 | 2014-10-02 | 富士フイルム株式会社 | 画像処理装置及び内視鏡システムの作動方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018181156A1 (ja) * | 2017-03-31 | 2018-10-04 | Hoya株式会社 | 電子内視鏡システム |
| JPWO2018181156A1 (ja) * | 2017-03-31 | 2019-11-14 | Hoya株式会社 | 電子内視鏡システム |
| US10939801B2 (en) | 2017-03-31 | 2021-03-09 | Hoya Corporation | Electronic endoscope system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160171718A1 (en) | 2016-06-16 |
| US9734592B2 (en) | 2017-08-15 |
| CN105701792A (zh) | 2016-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6461739B2 (ja) | 画像処理装置及び内視鏡システム並びに画像処理装置の作動方法 | |
| JP5932894B2 (ja) | 医用画像処理装置及びその作動方法 | |
| JP6121368B2 (ja) | 医用画像処理装置及びその作動方法並びに内視鏡システム | |
| JP6313884B2 (ja) | 内視鏡システム及びその作動方法 | |
| JP6099603B2 (ja) | 医用画像処理装置及びその作動方法並びに内視鏡システム | |
| JP6050286B2 (ja) | 医用画像処理装置及びその作動方法並びに内視鏡システム | |
| JP5972312B2 (ja) | 医用画像処理装置及びその作動方法 | |
| JP2016107003A (ja) | 医用画像処理装置及びその作動方法 | |
| JP6392486B1 (ja) | 内視鏡システム | |
| JP6690003B2 (ja) | 内視鏡システム及びその作動方法 | |
| WO2018230396A1 (ja) | 医用画像処理装置及び内視鏡システム並びに医用画像処理装置の作動方法 | |
| JP6047536B2 (ja) | 医用画像処理装置及びその作動方法 | |
| JP6247784B2 (ja) | 医用画像処理装置及び内視鏡システム | |
| JP7628871B2 (ja) | 医用画像処理装置及びその作動方法 | |
| JP6659817B2 (ja) | 医用画像処理装置 | |
| JP2021184924A (ja) | 医用画像処理装置 | |
| JP6113116B2 (ja) | 医用画像処理装置及びその作動方法並びに内視鏡システム | |
| JP6383829B2 (ja) | 医用画像処理装置及びその作動方法並びに内視鏡システム | |
| JP6456459B2 (ja) | 医用画像処理装置 | |
| JP6276149B2 (ja) | 内視鏡システム及びその作動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180214 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180620 |