JP2016140130A - 振動波モータ - Google Patents
振動波モータ Download PDFInfo
- Publication number
- JP2016140130A JP2016140130A JP2015012083A JP2015012083A JP2016140130A JP 2016140130 A JP2016140130 A JP 2016140130A JP 2015012083 A JP2015012083 A JP 2015012083A JP 2015012083 A JP2015012083 A JP 2015012083A JP 2016140130 A JP2016140130 A JP 2016140130A
- Authority
- JP
- Japan
- Prior art keywords
- vibrator
- vibration wave
- wave motor
- pressing
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
【課題】振動波モータ薄型化を図り、よりコンパクトな構成の振動波モータが要請されている。
【解決手段】本発明の振動波モータは、圧電素子が固定されている振動子と、振動子と接触する摩擦接触面を有する摩擦部材と、振動子を付勢して摩擦接触面に押圧させる押圧部を備えた加圧部材と、振動子に印加される加圧部材による付勢力に対する反力を転動部材を介して受けるカバー部材とを備える。カバー部材は、転動部材を受ける第一の溝部を備え、第一の溝部は、振動子と摩擦部材とが相対移動する方向に延在する。加圧部材は、カバー部材の第一の溝部と協働して転動部材を挟持し、相対移動する方向に延在する第二の溝部を備えた案内部を有している。
【選択図】 図1
【解決手段】本発明の振動波モータは、圧電素子が固定されている振動子と、振動子と接触する摩擦接触面を有する摩擦部材と、振動子を付勢して摩擦接触面に押圧させる押圧部を備えた加圧部材と、振動子に印加される加圧部材による付勢力に対する反力を転動部材を介して受けるカバー部材とを備える。カバー部材は、転動部材を受ける第一の溝部を備え、第一の溝部は、振動子と摩擦部材とが相対移動する方向に延在する。加圧部材は、カバー部材の第一の溝部と協働して転動部材を挟持し、相対移動する方向に延在する第二の溝部を備えた案内部を有している。
【選択図】 図1
Description
本発明は振動子に超音波振動を発生させることにより駆動力を発生する超音波モータ等の振動波モータに関する。
従来から、動作音が無く、低速から高速までの駆動が可能であり、高トルク出力などの特徴を活かして、例えば、カメラやレンズの駆動源として振動波モータが採用されている。
特許文献1に開示された超音波モータは、弾性部材によって振動子が摩擦部材に対して付勢された状態である加圧接触状態で保持されている。その加圧接触状態下において振動子に超音波振動が励起され、振動子の摩擦部材と接している接触部に楕円運動が生じることで、振動子が直進駆動される。この際、振動子は、加圧力の作用する方向と同一線上で溝に挟持されて配置された転動部材が転動することにより案内される。
特許文献1に開示された超音波モータにおいて、振動子を加圧する部材と転動部材とは、振動子が摩擦部材の摩擦接触面と接触するように、振動子の加圧方向に沿って配置される。その為、振動子を被駆動部材に加圧接触させる機構に加え、被駆動部材を案内する転動部材や、転動部材を保持するベース部材の厚みが加わる。その結果、加圧方向における超音波モータの大きさが増大し、超音波モータが大型化してしまう。
本発明は、上述の問題に鑑み、振動子に発生する超音波振動等により駆動させる振動波モータにおいて、出力や駆動効率等を減少させることなく、シンプルな構成により薄型化された加圧機構により、薄型でコンパクトな振動波モータを提供することを目的とする。
上記目的を達成するために本発明の振動波モータは、圧電素子が固定されている振動子と、振動子と接触する摩擦接触面を有する摩擦部材と、振動子を付勢して摩擦接触面に押圧させる押圧部を備えた加圧部材と、振動子に印加される加圧部材による付勢力に対する反力を転動部材を介して受けるカバー部材とを備え、カバー部材は、転動部材を受ける第一の溝部を備え、第一の溝部は、振動子と摩擦部材とが相対移動する方向に延在し、加圧部材は、カバー部材の第一の溝部と協働して転動部材を挟持し、相対移動する方向に延在する第二の溝部を備えた案内部を有している。
本発明によれば、振動子に発生する超音波振動等により被駆動部を駆動させる振動波モータにおいて、出力や駆動効率等を減少させることなく、シンプルな構成により薄型化された加圧機構により、薄型でコンパクトな構成の振動波モータを提供することができる。
以下、図面を参照しながら本発明の好適な実施の形態を説明する。尚、以下の実施形態によりこの発明が限定されるものではない。
以下の各実施例の説明において図面との関連において理解を容易ならしめるべく、振動子と摩擦部材との相対移動方向を「X軸」と規定し、説明を行う。また、加圧部材により振動子が摩擦部材に対して加圧される方向を「Z軸」、X軸とZ軸とに直交する方向を「Y軸」と規定し、説明を行う。
(実施例1)
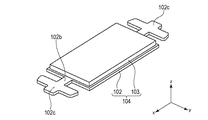
図1は、本発明の実施例1である振動波モータとしての超音波モータの分解斜視図である。なお、同一部材は同一記号で示されている。101は後述する振動子104が加圧接触する摩擦接触面101aを備える摩擦部材である。102は摩擦部材101の摩擦接触面101aに接触する突起部102aを備える振動板であり、103は振動板102に対して接着材などにより圧着される圧電素子である。そして、振動板102に圧電素子103が圧着された状態で圧電素子103に電圧を印加することで圧電素子103に超音波振動等の振動を励起させ、振動板102の突起部102aは楕円運動を発生する。なお、振動子104は振動板102と圧電素子103とにより構成される。105は振動子104を保持するための小基台である。106は、加圧部材107の押圧部107dに当接して加圧部材107の付勢力により振動子104を摩擦部材101に付勢する当接部材である。
図1は、本発明の実施例1である振動波モータとしての超音波モータの分解斜視図である。なお、同一部材は同一記号で示されている。101は後述する振動子104が加圧接触する摩擦接触面101aを備える摩擦部材である。102は摩擦部材101の摩擦接触面101aに接触する突起部102aを備える振動板であり、103は振動板102に対して接着材などにより圧着される圧電素子である。そして、振動板102に圧電素子103が圧着された状態で圧電素子103に電圧を印加することで圧電素子103に超音波振動等の振動を励起させ、振動板102の突起部102aは楕円運動を発生する。なお、振動子104は振動板102と圧電素子103とにより構成される。105は振動子104を保持するための小基台である。106は、加圧部材107の押圧部107dに当接して加圧部材107の付勢力により振動子104を摩擦部材101に付勢する当接部材である。
108は加圧部材107の案内部107fに設けられた第二の溝部107aに受け入れられる転動部材である。109は第一の溝部109aを備えるカバー部としてのカバー部材である。転動部材108は、加圧部材107に設けられた第二の溝部107aとカバー部材109に設けられた第一の溝部109aとに受け入れられて挟持される。110は摩擦部材101とカバー部材109とを保持するベース部材である。カバー部材109とベース部材110とは、例えばネジ等で締結される。しかし、カバー部材109とベース部材110とを一体で作製してもよい。また、摩擦部材101もベース部材110に対し、例えばネジ等で固定される。しかし、例えば接着や溶着により摩擦部材101とベース部材110とが固定されてもよい。
図2は、実施例1における振動板102と小基台105の接合状態を示す拡大斜視図であり、摩擦部材101の側から見た図である。図3は、実施例1における振動子104における振動板102と圧電素子103との接合状態を示す拡大斜視図である。
図2に示されるように、振動板102は、接着材、溶接等により振動板102の接合部102cにより小基台105に接合される。また、振動板102の中央部には、2箇所の突起部102aが形成されている。突起部102aの上端面、すなわち、摩擦部材101の摩擦接触面101aと当接する面は同一平面上に形成されている。
一方、図3に示されるように、振動板102の突起部102aが設けられた面の裏側の裏面部102bには圧電素子103が接着材等により圧着されている。なお、振動板102と圧電素子103との圧着は、圧着されればその方法は限定されない。圧電素子103は複数の圧電素子膜を積層して一体化したものである。そしてこの圧電素子103に所望の交流電圧を印加することで圧電素子103を励振させ、圧電素子103が圧着された振動板102は2つの振動モードで振動する。この2つの振動モードの振動位相が所望の位相差となるように設定することで、突起部102aには図2の矢印で示すような楕円運動Rが発生する。この楕円運動Rを振動子104で発生させ、摩擦部材101の摩擦接触面101aに伝達することで、摩擦部材101に対して振動子104を並進駆動させることが可能となる。なお、前述の圧電素子の積層構造や振動モードに関する詳細は特許文献2に記載された内容と同様である為、それらの説明は割愛する。
図4は実施例1の当接部材106と振動子104と小基台105との組み立て状態の斜視図となる。当接部材106は振動板102の突起部102aが設けられた面の裏側、すなわち、圧電素子103の側に取り付けられる。当接部材106は突起部106aを備え、後述する加圧部材107は突起部106aにて当接部材106に当接する。小基台105は第一の係合部105aと第二の係合部105bとを備え、後述する加圧部材107と係合する。
図5は、本実施例の超音波モータの並進移動方向及び加圧方向と平行な断面(XZ断面)であって、そのほぼ中心における断面を示した図となる。小基台105に設けられた第一の係合部105aと第二の係合部105bは、加圧部材107のプレート状の押圧部107dに設けられた穴に係合する。具体的には、押圧部107dには、小基台105の円柱形状の第一の係合部105aと係合するようにされた丸穴107bと、円柱形状の第二の係合部105bと係合するようにされた長穴107cが形成されている。丸穴107bは、第一の係合部105aの円形断面の直径とほぼ同じ若しくは若干大きい直径を有する丸穴形状で構成される。小基台105の第二の係合部105bと係合する長穴107cは、第二の係合部105bの円形断面の直径とほぼ同じ若しくは若干大きい直径を有する2つの半円部と、その2つの半円部をつなぐ直線部とから構成されている。長穴107cの直線部は超音波モータの並進移動方向に伸張している。丸穴107b及び長穴107cに第一の係合部105a及び第二の係合部105bがそれぞれ受け入れられることにより、小基台105と加圧部材107とは、振動子104の移動方向に一対で動くことができる。直線部が振動子104の移動方向に伸長している長穴107cに第二の係合部105bが受け入れられることにより、長穴107cと第二の係合部105bとの間には隙間が存在する。これにより、振動子104の楕円運動Rが、小基台105と加圧部材107との堅固な係合により低減してしまうことが防止される。
加圧部材107の押圧部107dに対し当接部材106に形成された突起部106aが当接するように構成される。後述する加圧部材107の弾性により発生する加圧力は、加圧部材107の押圧部107dにおいて突起部106aを介して当接部材106に伝達される。これにより、当接部材106と接する振動子104に加圧力が加わり、振動子104は摩擦部材101の摩擦接触面101aに対し加圧接触する。なお、本実施例は、当接部材106を介して加圧部材107の加圧力を振動子104に印加させているが、この態様に限定されることなく、加圧部材107による振動子104への加圧力を印加する態様はいかなる態様であってもよい。従って、当接部材106を介することなく、加圧部材107により直接的に振動子104に加圧力を印加するような構成であってもよい。
図6は実施例1における加圧部材107の斜視図である。加圧部材107は、プレート状の押圧部107dと、案内部107fと、押圧部107dと案内部107fとを接続する腕部107eとを備える。加圧部材107の案内部107fには、球形状の転動部材108を受け入れるためのV字形状の断面を有し、振動子104と摩擦部材101とが相対移動する方向(X軸方向)に延在する第二の溝部107aが形成されている。略矩形形状のプレート状の押圧部107dの周囲の4箇所に第二の溝部107aを有する案内部107fを配置している。加圧部材107の案内部107fを覆うようにカバー部材109が配置される。カバー部材109には、振動子104と摩擦部材101とが相対移動する方向(X軸方向)に延在する第一の溝部109aが形成されている。4つの転動部材108が、加圧部材107の第二の溝部107aとカバー部材109の第一の溝部109aとの協働により、それらに受け入れられて挟持される。これにより、振動子104と摩擦部材101とが相対移動する方向(X軸方向、以下「相対移動方向」という。)に加圧部材107はカバー部材に対してリニアに移動可能に案内される。
加圧部材107の案内部107fが、振動子104と摩擦部材101とが相対移動する方向と交差する方向に互いに対向配置するように、押圧部107dの該相対移動方向に延在し離間して対向する縁部において、腕部107eにより押圧部107dと案内部107fとが接続されている。この腕部107eを、弾性を有し他の部分よりも低い剛性を有するように、即ち、弾性変形可能に構成するようにしてもよい。これにより、4つの腕部107eにより案内部107fを独立して変位可能に押圧部107dに接続することができ、転動部材108を介して加圧力の反力をカバー部材109に適切に伝えることができる。
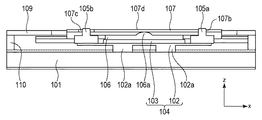
図7は、本実施例における超音波モータを振動子104の移動方向に直交し、加圧部材107による振動子104への加圧方向に平行な断面で切った断面図(YZ断面)である。腕部107eを介して案内部107fにおいて作用する加圧力に対する反力により、カバー部材109に対して転動部材108が付勢される。図7において、加圧部材107の第二の溝部107a又は案内部107fの裏面と押圧部107dの裏面との間隔を組立状態における距離Lとして示されている。この距離Lは組み立て前における寸法より小さくされている。これにより、図7に示すように、加圧部材107の押圧部107dには加圧力が働き、案内部107fの第二の溝部107aにはこの加圧力とは反対方向の反力が働くこととなる。押圧部107dで作用する加圧力により、振動子104を付勢し摩擦部材101の摩擦接触面101aに押圧している。
(実施例2)
実施例2は、実施例1で示した加圧部材107の変形例である。実施例2における加圧部材117の斜視図を図8に示す。図8において実施例1と同一の部材は同一の符号で示している。実施例2においては、加圧部材117における案内部107fの接続態様が実施例1のそれと異なっている。第二の溝部107aを有する案内部107fは、押圧部107dの周囲4箇所において弾性を有する腕部117aにより接続されている。更に、相対移動方向と交差する方向(Y軸方向)に互いに対向して配置されている加圧部材117の案内部同士が、弾性を有する補強部材117bにより直接接続されている。腕部117a及び補強部材117bの案内部107fへの接続構成の詳細については、図9を用いて以下に述べる。
実施例2は、実施例1で示した加圧部材107の変形例である。実施例2における加圧部材117の斜視図を図8に示す。図8において実施例1と同一の部材は同一の符号で示している。実施例2においては、加圧部材117における案内部107fの接続態様が実施例1のそれと異なっている。第二の溝部107aを有する案内部107fは、押圧部107dの周囲4箇所において弾性を有する腕部117aにより接続されている。更に、相対移動方向と交差する方向(Y軸方向)に互いに対向して配置されている加圧部材117の案内部同士が、弾性を有する補強部材117bにより直接接続されている。腕部117a及び補強部材117bの案内部107fへの接続構成の詳細については、図9を用いて以下に述べる。
図9は、実施例1において転動部材108が加圧部材107の第二の溝部107aの端部に位置した場合の説明図である。第二の溝部107aを有する案内部107fは、第二の溝部107aのほぼ中央において腕部107eにより押圧部107dに接続されている。図9は、超音波モータの振動子104と加圧部材107とが駆動されて移動し、転動部材108が相対移動方向(X軸方向)において案内部107fの第二の溝部107aの端部近傍まで転がった状態を示している。このような状態において、加圧力の反力のモーメントによる変位が第二の溝部107aの両端で図9に示す矢印の方向に発生する。そして、超音波モータの移動ストロークが大きくなるとそれに比例して発生し、転動部材108を介して加圧力に対する反力のカバー部材109への作用が不安定となったり、加圧部の押圧部107dによる加圧力が不安定となってしまうおそれがある。
実施例2にかかる加圧部117においては、図8に示すように、相対移動方向に延在する案内部107fの第二の溝部107aの内方側端部の近傍において、案内部107fは腕部117aにより押圧部107dに接続されている。更に、案内部107fは、第二の溝部107aの他方の端部、即ち、押圧部107dの中心に関して相対移動方向において腕部117aより遠い外方側端部の近傍において、相対移動方向と交差する方向(Y軸方向)に伸張する補強部材117bにより直接接続されている。
実施例2に係る構成によれば、転動部材108が大きな移動ストロークにより相対移動方向において案内部107fの第二の溝部107aの端部近傍に位置した場合でも、加圧力の反力のモーメントによる変位を抑えることが出来る。これにより、押圧部107dによる振動子104への安定した加圧力の印加を確保することが出来、また、転動部材を介して加圧力の反力を適切にカバー部材109に伝えることができる。
以上のとおり、本願発明によれば、シンプルな構成で加圧部による振動子への安定した加圧力を確保しつつ、超音波モータの薄型化を達成することができ、コンパクトな超音波モータを提供することができる。
以上本発明の好適な実施例について説明したが、本発明はこれらの実施例に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。
101 摩擦部材
101a 摩擦接触面
103 圧電素子
104 振動子
106 当接部材
107 加圧部材
107a 第二の溝部
107d 押圧部
107e 腕部
107f 案内部
108 転動部材
109 カバー部材
109a 第一の溝部
117 加圧部材
117a 腕部
117b 補強部材
101a 摩擦接触面
103 圧電素子
104 振動子
106 当接部材
107 加圧部材
107a 第二の溝部
107d 押圧部
107e 腕部
107f 案内部
108 転動部材
109 カバー部材
109a 第一の溝部
117 加圧部材
117a 腕部
117b 補強部材
Claims (11)
- 圧電素子が固定されている振動子と、
前記振動子と接触する摩擦接触面を有する摩擦部材と、
前記振動子を付勢して前記摩擦接触面に押圧させる押圧部を備えた加圧部材と、
前記振動子に印加される前記加圧部材による付勢力に対する反力を転動部材を介して受けるカバー部材と、
を備え、前記圧電素子により励起された振動により、前記振動子と前記摩擦部材とが相対移動する振動波モータであって、
前記カバー部材は、前記転動部材を受ける第一の溝部を備え、前記第一の溝部は、前記振動子と前記摩擦部材とが相対移動する方向に延在し、
前記加圧部材は、前記カバー部材の前記第一の溝部と協働して前記転動部材を挟持し、前記相対移動する方向に延在する第二の溝部を備えた案内部を有することを特徴とする振動波モータ。 - 前記加圧部材の前記案内部は、前記押圧部に対して弾性変形可能に接続されていることを特徴とする請求項1に記載の振動波モータ。
- 前記加圧部材の前記案内部は、弾性変形可能な腕部により前記押圧部に接続されていることを特徴とする請求項2に記載の振動波モータ。
- 前記加圧部材の前記案内部は、前記相対移動方向と交差する方向において前記押圧部を挟んで対向配置されていることを特徴とする請求項1乃至3のいずれか一項に記載の振動波モータ。
- 前記相対移動方向に伸張する前記押圧部の縁部が互いに対向して配置されており、二つの前記案内部が前記相対移動方向に離間して腕部により前記縁部の各々に接続されていることを特徴とする請求項1乃至4のいずれか一項に記載の振動波モータ。
- 前記加圧部材の前記案内部は、それぞれ独立して前記押圧部に対して腕部により弾性変形可能に接続されていることを特徴とする請求項5に記載の振動波モータ。
- 前記相対移動方向と交差する方向において互いに対向する各対の前記案内部同士が、前記相対移動方向と交差する方向に延在する補強部材に弾性変形可能に接続されていることを特徴とする請求項5又は6に記載の振動波モータ。
- 前記補強部材は前記押圧部の中心に関して前記腕部よりも遠い位置に配置されていることを特徴とする請求項7に記載の振動波モータ。
- 前記腕部は前記押圧部の中心に近い側の前記第二の溝部の端部の近傍に位置するように前記加圧部材の前記押圧部に接続されており、前記補強部材は前記第二の溝部の他の端部の近傍に位置するように前記案内部に接続されていることを特徴とする請求項8に記載の振動波モータ。
- 前記押圧部は当接部材を介して前記振動子を付勢することを特徴とする請求項1乃至9のいずれか一項に記載の振動波モータ。
- 前記振動波モータは、前記圧電素子により励起された振動が超音波振動である超音波モータであることを特徴とする請求項1乃至10のいずれか一項に記載の振動波モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015012083A JP2016140130A (ja) | 2015-01-26 | 2015-01-26 | 振動波モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015012083A JP2016140130A (ja) | 2015-01-26 | 2015-01-26 | 振動波モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016140130A true JP2016140130A (ja) | 2016-08-04 |
Family
ID=56560599
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015012083A Pending JP2016140130A (ja) | 2015-01-26 | 2015-01-26 | 振動波モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016140130A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019146434A (ja) * | 2018-02-23 | 2019-08-29 | キヤノン株式会社 | 振動波モータ及びレンズ駆動装置 |
-
2015
- 2015-01-26 JP JP2015012083A patent/JP2016140130A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019146434A (ja) * | 2018-02-23 | 2019-08-29 | キヤノン株式会社 | 振動波モータ及びレンズ駆動装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102916609B (zh) | 超声波马达和包括该超声波马达的镜头设备 | |
| JP5773900B2 (ja) | モータ | |
| KR101604991B1 (ko) | 초음파 모터 및 이를 갖는 렌즈 장치 | |
| US9705427B2 (en) | Ultrasonic motor and lens apparatus including the same | |
| JP6324208B2 (ja) | 超音波モータ | |
| KR20150085798A (ko) | 리니어 진동파 모터 | |
| JP6415195B2 (ja) | 駆動装置 | |
| CN108667341B (zh) | 振动波马达和光学装置 | |
| JP6257224B2 (ja) | モータ及びレンズ装置 | |
| JP4294061B2 (ja) | 超音波モータ及び超音波モータ付電子機器 | |
| JP2016140130A (ja) | 振動波モータ | |
| JP2016059121A5 (ja) | ||
| JP2009118735A (ja) | 超音波モータ及び超音波モータ付電子機器 | |
| JP2019039997A (ja) | 振動波モータおよび駆動装置 | |
| JP3444502B2 (ja) | 超音波リニアモータ | |
| JP3444504B2 (ja) | 超音波振動子 | |
| JP2016101022A (ja) | 駆動装置 | |
| JP2016082611A (ja) | 駆動装置 | |
| JP7207949B2 (ja) | 振動波モータ及び振動波モータを備えた駆動装置 | |
| JP6479238B2 (ja) | モータ | |
| JP5985013B2 (ja) | モータ及びレンズ鏡筒 | |
| JP2019187196A (ja) | 振動波モータ及び振動波モータを備えた駆動装置 | |
| JP2009027834A (ja) | 超音波モータ | |
| JP2014209819A (ja) | 駆動装置 | |
| JP6602037B2 (ja) | 駆動装置及びそれを有する光学装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20171214 |