JP2016166741A - 磁気センサ - Google Patents
磁気センサ Download PDFInfo
- Publication number
- JP2016166741A JP2016166741A JP2015045477A JP2015045477A JP2016166741A JP 2016166741 A JP2016166741 A JP 2016166741A JP 2015045477 A JP2015045477 A JP 2015045477A JP 2015045477 A JP2015045477 A JP 2015045477A JP 2016166741 A JP2016166741 A JP 2016166741A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- component
- angle
- value
- ratio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
- G01R33/093—Magnetoresistive devices using multilayer structures, e.g. giant magnetoresistance sensors
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measuring Magnetic Variables (AREA)
Abstract
【解決手段】磁気センサは、基準位置における被検出磁界の方向が基準方向に対してなす角度と対応関係を有する角度検出値を生成する。磁気センサは、磁界検出部を備えている。被検出磁界の方向が所定の周期で回転する場合、角度検出値は、所定の周期の1/4の周期で変化する角度誤差成分を含む。磁界検出部における被検出磁界の強度が、20〜150mTの範囲内の一部である副範囲であって、上限と下限の差が30mT以上である副範囲内で変化するときの角度誤差成分の絶対値の最大値E4の変動量は、0.1°以下である。
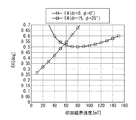
【選択図】図21
Description
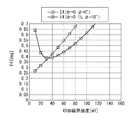
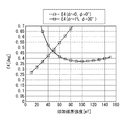
第1の実施例の磁気センサ1は、自由層51の第2の面の形状を、drが1%、αが0°である形状とし、且つオフセット角度φを25°としたものである。図20は、第1の実施例の磁気センサ1と比較例の磁気センサにおけるV3r,V5rのそれぞれの磁界強度依存性を示す特性図である。図21は、第1の実施例の磁気センサ1と比較例の磁気センサにおけるE4の磁界強度依存性を示す特性図である。図20では、第1の実施例の磁気センサ1におけるV3r,V5rをV3r(dr=1%,φ=25°),V5r(dr=1%,φ=25°)と表記し、比較例の磁気センサにおけるV3r,V5rをV3r(dr=0,φ=0°),V5r(dr=0,φ=0°)と表記している。また、図21では、第1の実施例の磁気センサ1におけるE4をE4(dr=1%,φ=25°)と表記し、比較例の磁気センサにおけるE4をE4(dr=0,φ=0°)と表記している。
第2の実施例の磁気センサ1は、自由層51の第2の面の形状を、drが0.1%、αが0°である形状とし、且つオフセット角度φを10°としたものである。図26は、第2の実施例の磁気センサ1と比較例の磁気センサにおけるV3r,V5rのそれぞれの磁界強度依存性を示す特性図である。図27は、第2の実施例の磁気センサ1と比較例の磁気センサにおけるE4の磁界強度依存性を示す特性図である。図26では、第2の実施例の磁気センサ1におけるV3r,V5rをV3r(dr=0.1%,φ=10°),V5r(dr=0.1%,φ=10°)と表記し、比較例の磁気センサにおけるV3r,V5rをV3r(dr=0,φ=0°),V5r(dr=0,φ=0°)と表記している。また、図27では、第2の実施例の磁気センサ1におけるE4をE4(dr=0.1%,φ=10°)と表記し、比較例の磁気センサにおけるE4をE4(dr=0,φ=0°)と表記している。
第3の実施例の磁気センサ1は、自由層51の第2の面の形状を、drが1%、αが0°である形状とし、且つオフセット角度φを30°としたものである。図28は、第3の実施例の磁気センサ1と比較例の磁気センサにおけるV3r,V5rのそれぞれの磁界強度依存性を示す特性図である。図29は、第3の実施例の磁気センサ1と比較例の磁気センサにおけるE4の磁界強度依存性を示す特性図である。図28では、第3の実施例の磁気センサ1におけるV3r,V5rをV3r(dr=1%,φ=30°),V5r(dr=1%,φ=30°)と表記し、比較例の磁気センサにおけるV3r,V5rをV3r(dr=0,φ=0°),V5r(dr=0,φ=0°)と表記している。また、図29では、第3の実施例の磁気センサ1におけるE4をE4(dr=1%,φ=30°)と表記し、比較例の磁気センサにおけるE4をE4(dr=0,φ=0°)と表記している。
Claims (10)
- 基準位置における被検出磁界の方向が基準方向に対してなす角度と対応関係を有する角度検出値を生成する磁気センサであって、
磁界検出部と演算部とを備え、
前記磁界検出部は、前記被検出磁界を検出する複数の磁気抵抗効果素子を含み、前記被検出磁界の方向が第1の方向に対してなす角度と対応関係を有する第1の信号と前記被検出磁界の方向が第2の方向に対してなす角度と対応関係を有する第2の信号とを出力し、
前記複数の磁気抵抗効果素子の各々は、磁化方向が固定された磁化固定層と、前記被検出磁界の方向に応じて磁化の方向が変化する自由層と、前記磁化固定層と自由層の間に配置された非磁性層とを有し、
前記演算部は、前記第1および第2の信号に基づいて前記角度検出値を算出し、
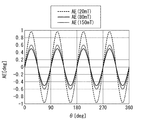
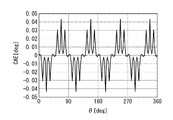
前記被検出磁界の方向が所定の周期で回転する場合、前記角度検出値は、前記所定の周期の1/4の周期で変化する角度誤差成分を含み、
前記磁界検出部における前記被検出磁界の強度が、20〜150mTの範囲の一部である副範囲であって、上限と下限の差が30mT以上である副範囲内で変化するときの前記角度誤差成分の絶対値の最大値の変動量は、0.1°以下であることを特徴とする磁気センサ。 - 前記被検出磁界の方向が前記所定の周期で回転する場合、前記第1の信号は、理想的な正弦曲線を描くように周期的に変化する第1の理想成分と、前記第1の理想成分に対する第3高調波に相当する誤差成分である第1の第3高調波成分と、前記第1の理想成分に対する第5高調波に相当する誤差成分である第1の第5高調波成分とを含み、前記第2の信号は、理想的な正弦曲線を描くように周期的に変化する第2の理想成分と、前記第2の理想成分に対する第3高調波に相当する誤差成分である第2の第3高調波成分と、前記第2の理想成分に対する第5高調波に相当する誤差成分である第2の第5高調波成分とを含み、
前記第1の理想成分が最大値をとるときの前記第1の理想成分に対する前記第1の第3高調波成分の比率を第1の比率とし、前記第1の理想成分が最大値をとるときの前記第1の理想成分に対する前記第1の第5高調波成分の比率を第2の比率とし、前記第2の理想成分が最大値をとるときの前記第2の理想成分に対する前記第2の第3高調波成分の比率を第3の比率とし、前記第2の理想成分が最大値をとるときの前記第2の理想成分に対する前記第2の第5高調波成分の比率を第4の比率とし、前記第1の比率と前記第3の比率の平均値を第3高調波成分比率とし、前記第2の比率と前記第4の比率の平均値を第5高調波成分比率としたときに、前記磁界検出部における前記被検出磁界の強度が前記副範囲内で変化するときの前記第3高調波成分比率と前記第5高調波成分比率との差の絶対値の変動量が0.18%以下であることを特徴とする請求項1記載の磁気センサ。 - 前記演算部は、前記角度検出値を算出する角度検出値算出部と、前記角度検出値に対して補正処理を行って補正後角度検出値を生成する補正処理部とを含み、前記補正後角度検出値の誤差の絶対値の最大値は、前記角度検出値の誤差の絶対値の最大値よりも小さいことを特徴とする請求項1または2記載の磁気センサ。
- 前記補正処理部は、前記磁界検出部における前記被検出磁界の強度が前記副範囲内のどの値であっても、前記補正後角度検出値の誤差の最大値と最小値の差の1/2が0.1°以下になるように、前記補正処理を行うことを特徴とする請求項3記載の磁気センサ。
- 前記磁界検出部における前記被検出磁界の強度が前記副範囲内で変化するときの前記角度誤差成分の絶対値の最大値の変動量は、0.05°以下であることを特徴とする請求項1記載の磁気センサ。
- 前記被検出磁界の方向が前記所定の周期で回転する場合、前記第1の信号は、理想的な正弦曲線を描くように周期的に変化する第1の理想成分と、前記第1の理想成分に対する第3高調波に相当する誤差成分である第1の第3高調波成分と、前記第1の理想成分に対する第5高調波に相当する誤差成分である第1の第5高調波成分とを含み、前記第2の信号は、理想的な正弦曲線を描くように周期的に変化する第2の理想成分と、前記第2の理想成分に対する第3高調波に相当する誤差成分である第2の第3高調波成分と、前記第2の理想成分に対する第5高調波に相当する誤差成分である第2の第5高調波成分とを含み、
前記第1の理想成分が最大値をとるときの前記第1の理想成分に対する前記第1の第3高調波成分の比率を第1の比率とし、前記第1の理想成分が最大値をとるときの前記第1の理想成分に対する前記第1の第5高調波成分の比率を第2の比率とし、前記第2の理想成分が最大値をとるときの前記第2の理想成分に対する前記第2の第3高調波成分の比率を第3の比率とし、前記第2の理想成分が最大値をとるときの前記第2の理想成分に対する前記第2の第5高調波成分の比率を第4の比率とし、前記第1の比率と前記第3の比率の平均値を第3高調波成分比率とし、前記第2の比率と前記第4の比率の平均値を第5高調波成分比率としたときに、前記磁界検出部における前記被検出磁界の強度が前記副範囲内で変化するときの前記第3高調波成分比率と前記第5高調波成分比率との差の絶対値の変動量が0.09%以下であることを特徴とする請求項5記載の磁気センサ。 - 前記演算部は、前記角度検出値を算出する角度検出値算出部と、前記角度検出値に対して補正処理を行って補正後角度検出値を生成する補正処理部とを含み、前記補正後角度検出値の誤差の絶対値の最大値は、前記角度検出値の誤差の絶対値の最大値よりも小さいことを特徴とする請求項5または6記載の磁気センサ。
- 前記補正処理部は、前記磁界検出部における前記被検出磁界の強度が前記副範囲内のどの値であっても、前記補正後角度検出値の誤差の最大値と最小値の差の1/2が0.05°以下になるように、前記補正処理を行うことを特徴とする請求項7記載の磁気センサ。
- 前記第2の方向は、前記第1の方向に直交していることを特徴とする請求項1ないし8のいずれかに記載の磁気センサ。
- 前記磁界検出部は、前記第1の信号を出力する第1の検出回路と、前記第2の信号を出力する第2の検出回路とを有し、
前記第1の検出回路と前記第2の検出回路の各々は、前記複数の磁気抵抗効果素子のうちの2つ以上が直列に接続されて構成された磁気抵抗効果素子列を含み、
前記複数の磁気抵抗効果素子の各々の前記自由層は、前記非磁性層に接する第1の面と、その反対側の第2の面とを有し、前記第2の面は、5回以上の回転対称とはならない4回対称の回転対称形状を有し、
前記磁気抵抗効果素子列を構成する2つ以上の磁気抵抗効果素子の数は、偶数であり、
前記磁気抵抗効果素子列を構成する2つ以上の磁気抵抗効果素子は、磁気抵抗効果素子の対を1つ以上含み、
前記対を構成する2つの磁気抵抗効果素子における磁化固定層の磁化方向は、0°および180°を除く所定の相対角度をなし、
前記第1の検出回路において、前記第1の方向は、前記対を構成する2つの磁気抵抗効果素子における磁化固定層の磁化方向の中間の方向またはそれとは反対の方向であり、
前記第2の検出回路において、前記第2の方向は、前記対を構成する2つの磁気抵抗効果素子における磁化固定層の磁化方向の中間の方向またはそれとは反対の方向であることを特徴とする請求項1ないし9のいずれかに記載の磁気センサ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015045477A JP6191838B2 (ja) | 2015-03-09 | 2015-03-09 | 磁気センサ |
| DE102016104285.4A DE102016104285C5 (de) | 2015-03-09 | 2016-03-09 | Magnetsensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015045477A JP6191838B2 (ja) | 2015-03-09 | 2015-03-09 | 磁気センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016166741A true JP2016166741A (ja) | 2016-09-15 |
| JP6191838B2 JP6191838B2 (ja) | 2017-09-06 |
Family
ID=56801290
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015045477A Active JP6191838B2 (ja) | 2015-03-09 | 2015-03-09 | 磁気センサ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6191838B2 (ja) |
| DE (1) | DE102016104285C5 (ja) |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018054584A (ja) * | 2016-09-30 | 2018-04-05 | Tdk株式会社 | 角度センサおよび角度センサシステム |
| CN108627082A (zh) * | 2017-03-24 | 2018-10-09 | Tdk株式会社 | 角度传感器系统 |
| JP2018162994A (ja) * | 2017-03-24 | 2018-10-18 | Tdk株式会社 | 角度センサシステム |
| WO2019151479A1 (ja) * | 2018-02-02 | 2019-08-08 | 株式会社三共製作所 | 移動体の運動による位置変化量を検出する方法及び装置 |
| KR20200013662A (ko) * | 2017-05-31 | 2020-02-07 | 섀플러 테크놀로지스 아게 운트 코. 카게 | 회전 부품, 특히 차량의 클러치 작동 시스템용 전기 모터의 각도 위치 결정 방법 |
| US20200064416A1 (en) * | 2017-05-29 | 2020-02-27 | Panasonic Intellectual Property Management Co., Ltd. | Magnetic sensor |
| CN113494928A (zh) * | 2020-04-08 | 2021-10-12 | Tdk株式会社 | 磁传感器,磁编码器及透镜位置检测装置 |
| CN113532486A (zh) * | 2020-04-20 | 2021-10-22 | Tdk株式会社 | 磁传感器、磁式编码器及透镜检测装置 |
| CN113811738A (zh) * | 2019-06-11 | 2021-12-17 | 株式会社村田制作所 | 磁传感器、磁传感器阵列、磁场分布测定装置及位置确定装置 |
| CN113960508A (zh) * | 2020-07-21 | 2022-01-21 | Tdk株式会社 | 磁传感器 |
| CN114791578A (zh) * | 2021-01-25 | 2022-07-26 | Tdk株式会社 | 磁传感器 |
| JP2022546363A (ja) * | 2019-08-28 | 2022-11-04 | アレグロ・マイクロシステムズ・エルエルシー | 磁場角度センサにおける角度誤差の低減 |
| CN115839653A (zh) * | 2019-11-08 | 2023-03-24 | Tdk株式会社 | 位置检测装置 |
| CN116243221A (zh) * | 2021-12-06 | 2023-06-09 | Tdk株式会社 | 磁传感器、电控制装置、校正方法及磁传感器的制造方法 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6288481B2 (ja) | 2016-06-24 | 2018-03-07 | Tdk株式会社 | 角度センサおよび角度センサシステム |
| DE102017222508B4 (de) * | 2017-12-12 | 2022-02-17 | Carl Zeiss Industrielle Messtechnik Gmbh | Verfahren und Vorrichtung zur Korrektur von Messsystemabweichungen |
| US11199424B2 (en) | 2018-01-31 | 2021-12-14 | Allegro Microsystems, Llc | Reducing angle error in a magnetic field angle sensor |
| US11175359B2 (en) | 2019-08-28 | 2021-11-16 | Allegro Microsystems, Llc | Reducing voltage non-linearity in a bridge having tunneling magnetoresistance (TMR) elements |
| US11467233B2 (en) | 2020-03-18 | 2022-10-11 | Allegro Microsystems, Llc | Linear bridges having nonlinear elements |
| US11408948B2 (en) | 2020-03-18 | 2022-08-09 | Allegro Microsystems, Llc | Linear bridge having nonlinear elements for operation in high magnetic field intensities |
| DE102021110733A1 (de) | 2021-04-27 | 2022-10-27 | Sensitec Gmbh | Magnetfeldbasierter Winkelsensor |
| US11719773B2 (en) | 2021-07-14 | 2023-08-08 | Globalfoundries U.S. Inc. | Magnetic field sensor with MTJ elements arranged in series |
| DE102022125821A1 (de) * | 2022-10-06 | 2024-04-11 | Tdk-Micronas Gmbh | Kompensation einer harmonischen |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63225124A (ja) * | 1987-03-14 | 1988-09-20 | Hitachi Ltd | 磁気的位置検出装置 |
| US6433537B1 (en) * | 1998-10-28 | 2002-08-13 | Koninklijke Philips Electronics, N.V. | Arrangement for measuring a relative linear position between an angle sensor and magnetic body |
| JP2005214920A (ja) * | 2004-02-02 | 2005-08-11 | Sankyo Seiki Mfg Co Ltd | 磁気センサ |
| US20060290545A1 (en) * | 2005-05-31 | 2006-12-28 | Wolfgang Granig | Method for Determining Residual Error Compensation Parameters for a Magnetoresistive Angle Sensor and Method for Reducing a Residual Angle Error in a Magnetoresistive Angle Sensor |
| JP2012522238A (ja) * | 2009-03-31 | 2012-09-20 | ヴァレオ エキプマン エレクトリク モトゥール | 多相回転電気機器の角度位置測定センサの機能故障を診断する方法および装置 |
| US20150066426A1 (en) * | 2013-08-27 | 2015-03-05 | Tdk Corporation | Rotating field sensor |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6633462B2 (en) | 2000-07-13 | 2003-10-14 | Koninklijke Philips Electronics N.V. | Magnetoresistive angle sensor having several sensing elements |
| JP5131339B2 (ja) | 2010-11-17 | 2013-01-30 | Tdk株式会社 | 回転磁界センサ |
| JP5590349B2 (ja) | 2012-07-18 | 2014-09-17 | Tdk株式会社 | 磁気センサシステム |
| WO2015030837A1 (en) * | 2013-08-27 | 2015-03-05 | Halliburton Energy Services, Inc. | Simulating fluid leak-off and flow-back in a fractured subterranean |
-
2015
- 2015-03-09 JP JP2015045477A patent/JP6191838B2/ja active Active
-
2016
- 2016-03-09 DE DE102016104285.4A patent/DE102016104285C5/de active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63225124A (ja) * | 1987-03-14 | 1988-09-20 | Hitachi Ltd | 磁気的位置検出装置 |
| US6433537B1 (en) * | 1998-10-28 | 2002-08-13 | Koninklijke Philips Electronics, N.V. | Arrangement for measuring a relative linear position between an angle sensor and magnetic body |
| JP2005214920A (ja) * | 2004-02-02 | 2005-08-11 | Sankyo Seiki Mfg Co Ltd | 磁気センサ |
| US20060290545A1 (en) * | 2005-05-31 | 2006-12-28 | Wolfgang Granig | Method for Determining Residual Error Compensation Parameters for a Magnetoresistive Angle Sensor and Method for Reducing a Residual Angle Error in a Magnetoresistive Angle Sensor |
| JP2012522238A (ja) * | 2009-03-31 | 2012-09-20 | ヴァレオ エキプマン エレクトリク モトゥール | 多相回転電気機器の角度位置測定センサの機能故障を診断する方法および装置 |
| US20150066426A1 (en) * | 2013-08-27 | 2015-03-05 | Tdk Corporation | Rotating field sensor |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018054584A (ja) * | 2016-09-30 | 2018-04-05 | Tdk株式会社 | 角度センサおよび角度センサシステム |
| CN108627082B (zh) * | 2017-03-24 | 2020-09-04 | Tdk株式会社 | 角度传感器系统 |
| CN108627082A (zh) * | 2017-03-24 | 2018-10-09 | Tdk株式会社 | 角度传感器系统 |
| JP2018162994A (ja) * | 2017-03-24 | 2018-10-18 | Tdk株式会社 | 角度センサシステム |
| JP2018162995A (ja) * | 2017-03-24 | 2018-10-18 | Tdk株式会社 | 角度センサシステム |
| US20200064416A1 (en) * | 2017-05-29 | 2020-02-27 | Panasonic Intellectual Property Management Co., Ltd. | Magnetic sensor |
| KR20200013662A (ko) * | 2017-05-31 | 2020-02-07 | 섀플러 테크놀로지스 아게 운트 코. 카게 | 회전 부품, 특히 차량의 클러치 작동 시스템용 전기 모터의 각도 위치 결정 방법 |
| KR102700958B1 (ko) * | 2017-05-31 | 2024-09-02 | 섀플러 테크놀로지스 아게 운트 코. 카게 | 회전 부품, 특히 차량의 클러치 작동 시스템용 전기 모터의 각도 위치 결정 방법 |
| US11378604B2 (en) | 2018-02-02 | 2022-07-05 | Sankyo Seisakusho Co. | Method and device for detecting positional change amount due to movement of moving body |
| JPWO2019151479A1 (ja) * | 2018-02-02 | 2021-02-04 | 株式会社三共製作所 | 移動体の運動による位置変化量を検出する方法及び装置 |
| JP7190454B2 (ja) | 2018-02-02 | 2022-12-15 | 株式会社三共製作所 | 移動体の運動による位置変化量を検出する方法及び装置 |
| WO2019151479A1 (ja) * | 2018-02-02 | 2019-08-08 | 株式会社三共製作所 | 移動体の運動による位置変化量を検出する方法及び装置 |
| CN113811738A (zh) * | 2019-06-11 | 2021-12-17 | 株式会社村田制作所 | 磁传感器、磁传感器阵列、磁场分布测定装置及位置确定装置 |
| JP2022546363A (ja) * | 2019-08-28 | 2022-11-04 | アレグロ・マイクロシステムズ・エルエルシー | 磁場角度センサにおける角度誤差の低減 |
| JP7482215B2 (ja) | 2019-08-28 | 2024-05-13 | アレグロ・マイクロシステムズ・エルエルシー | 磁場角度センサにおける角度誤差の低減 |
| CN115839653A (zh) * | 2019-11-08 | 2023-03-24 | Tdk株式会社 | 位置检测装置 |
| CN113494928A (zh) * | 2020-04-08 | 2021-10-12 | Tdk株式会社 | 磁传感器,磁编码器及透镜位置检测装置 |
| CN113532486A (zh) * | 2020-04-20 | 2021-10-22 | Tdk株式会社 | 磁传感器、磁式编码器及透镜检测装置 |
| CN113960508A (zh) * | 2020-07-21 | 2022-01-21 | Tdk株式会社 | 磁传感器 |
| CN113960508B (zh) * | 2020-07-21 | 2024-05-24 | Tdk株式会社 | 磁传感器 |
| CN114791578A (zh) * | 2021-01-25 | 2022-07-26 | Tdk株式会社 | 磁传感器 |
| CN116243221A (zh) * | 2021-12-06 | 2023-06-09 | Tdk株式会社 | 磁传感器、电控制装置、校正方法及磁传感器的制造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102016104285A1 (de) | 2016-09-15 |
| DE102016104285C5 (de) | 2026-01-08 |
| JP6191838B2 (ja) | 2017-09-06 |
| DE102016104285B4 (de) | 2019-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6191838B2 (ja) | 磁気センサ | |
| JP5590349B2 (ja) | 磁気センサシステム | |
| US8736256B2 (en) | Rotating field sensor | |
| JP5062454B2 (ja) | 磁気センサ | |
| JP2011038855A (ja) | 磁気センサ | |
| US10648787B2 (en) | Rotating field sensor | |
| JP6288482B1 (ja) | 角度センサおよび角度センサシステム | |
| JP6331177B1 (ja) | 角度センサシステム | |
| JP2016166748A (ja) | 磁気センサ | |
| US9200884B2 (en) | Magnetic sensor system including three detection circuits | |
| JP6331176B1 (ja) | 角度センサシステム | |
| JP6288481B2 (ja) | 角度センサおよび角度センサシステム | |
| US20160169707A1 (en) | Rotating field sensor | |
| JP6066134B2 (ja) | 磁気センサシステム | |
| JP6395060B2 (ja) | 角度センサおよびその補正方法ならびに角度センサシステム | |
| JP5928236B2 (ja) | 回転磁界センサ | |
| JP2014199182A (ja) | 磁気センサシステム | |
| JP6536632B2 (ja) | 角度センサおよび角度センサシステム | |
| JP6784283B2 (ja) | 角度センサシステム | |
| JP5812046B2 (ja) | 回転磁界センサ | |
| JP5062453B2 (ja) | 磁気センサ | |
| JP5928234B2 (ja) | 回転磁界センサ | |
| JP5365730B1 (ja) | 回転磁界センサ | |
| JP5928235B2 (ja) | 回転磁界センサ | |
| JP6003371B2 (ja) | 回転磁界センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170712 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170725 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6191838 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |