JP2016181753A - 情報処理装置、情報処理方法、プログラムおよびシステム - Google Patents
情報処理装置、情報処理方法、プログラムおよびシステム Download PDFInfo
- Publication number
- JP2016181753A JP2016181753A JP2015059836A JP2015059836A JP2016181753A JP 2016181753 A JP2016181753 A JP 2016181753A JP 2015059836 A JP2015059836 A JP 2015059836A JP 2015059836 A JP2015059836 A JP 2015059836A JP 2016181753 A JP2016181753 A JP 2016181753A
- Authority
- JP
- Japan
- Prior art keywords
- instruction information
- captured image
- information processing
- subject
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two two-dimensional [2D] image sensors having a relative position equal to or related to the interocular distance
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
- G06T7/85—Stereo camera calibration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/246—Calibration of cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N17/00—Diagnosis, testing or measuring for television systems or their details
- H04N17/002—Diagnosis, testing or measuring for television systems or their details for television cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/633—Control of cameras or camera modules by using electronic viewfinders for displaying additional information relating to control or operation of the camera
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/64—Computer-aided capture of images, e.g. transfer from script file into camera, check of taken image quality, advice or proposal for image composition or decision on when to take image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20092—Interactive image processing based on input by user
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30204—Marker
- G06T2207/30208—Marker matrix
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Data Mining & Analysis (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Databases & Information Systems (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- General Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Studio Devices (AREA)
Abstract
【課題】撮像画像を補正するための補正パラメータの算出精度の低下を抑制可能な情報処理装置、情報処理方法、プログラム、および、システムを提供する。
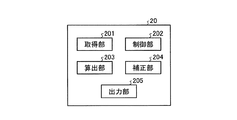
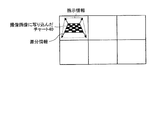
【解決手段】本発明に係る情報処理装置は、取得部と、制御部とを備える。取得部は、撮像装置による撮像で得られた撮像画像を取得する。制御部は、複数の特徴点を有する被写体のかざし方を指示するための指示情報を撮像画像に重畳した重畳画像を、表示装置に表示する制御を行う。
【選択図】図3
Description
上述した情報処理装置20のCPU21が実行するプログラムは、インストール可能な形式または実行可能な形式のファイルでCD−ROM、フレキシブルディスク(FD)、CD−R、DVD(Digital Versatile Disk)、USB(Universal Serial Bus)等のコンピュータで読み取り可能な記録媒体に記録して提供するように構成してもよいし、インターネット等のネットワーク経由で提供または配布するように構成してもよい。また、各種プログラムを、ROM等に予め組み込んで提供するように構成してもよい。
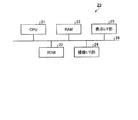
10 撮像装置
20 情報処理装置
21 CPU
22 ROM
23 RAM
24 撮像I/F部
25 表示I/F部
26 バス
30 表示装置
40 チャート
201 取得部
202 制御部
203 算出部
204 補正部
205 出力部
Claims (16)
- 撮像装置による撮像で得られた撮像画像を取得する取得部と、
複数の特徴点を有する被写体のかざし方を指示するための指示情報を前記撮像画像に重畳した重畳画像を、表示装置に表示する制御を行う制御部と、を備える、
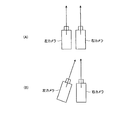
情報処理装置。 - 前記指示情報は、前記撮像装置に対する前記被写体の位置および姿勢を指示するための情報である、
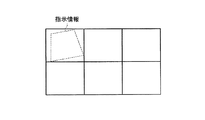
請求項1に記載の情報処理装置。 - 前記指示情報は、前記被写体の位置および姿勢が、前記指示情報に対応する位置および姿勢と一致する場合に前記撮像画像に映り込むべき前記被写体の形状を表す情報である、
請求項2に記載の情報処理装置。 - 前記制御部は、
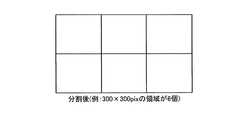
前記撮像画像の画像領域を分割する複数の領域ごとに、対応する2以上の前記指示情報を順次に生成し、前記指示情報を生成するたびに、その生成した前記指示情報を前記撮像画像に重畳した前記重畳画像を前記表示装置に表示する制御を行って、前記表示装置に表示する前記重畳画像を切り替える、
請求項1乃至3のうちの何れか1項に記載の情報処理装置。 - 前記制御部は、
前記複数の領域ごとに、該領域に対応して予め定められた前記被写体の2以上の位置および姿勢と1対1に対応する2以上の前記指示情報を順次に生成する、
請求項4に記載の情報処理装置。 - 前記制御部は、前記指示情報と、前記撮像画像に映り込んだ前記被写体との関係が所定の条件を満たす場合は、その場合の前記撮像画像と、その場合の前記撮像画像に映り込んだ前記複数の特徴点の位置とを含む特徴点データを取得して、次の前記指示情報を生成する、
請求項4または5に記載の情報処理装置。 - 前記指示情報は、前記被写体の位置および姿勢が、前記指示情報に対応する位置および姿勢と一致する場合に前記撮像画像に映り込むべき前記被写体の形状を表す情報であり、
前記制御部は、前記撮像画像から抽出された特徴点の数が第1の閾値以上であり、かつ、前記指示情報が表す形状と、前記撮像画像に映り込んだ前記被写体の形状との差分が第2の閾値未満の場合は、前記所定の条件を満たすと判断する、
請求項6に記載の情報処理装置。 - 前記制御部は、前記指示情報と、前記撮像画像に映り込んだ前記被写体との関係が前記所定の条件を満たさない場合は、前記被写体の位置および姿勢の変更を促す報知を行う、
請求項6または7に記載の情報処理装置。 - 前記制御部は、
前記複数の領域のうちの何れかの領域に対応する2以上の前記指示情報と1対1に対応する2以上の前記特徴点データを取得した場合、別の領域に対応する2以上の前記指示情報を順次に生成する、
請求項6乃至8のうちの何れか1項に記載の情報処理装置。 - 複数の前記特徴点データに基づいて、前記撮像画像を補正するための補正パラメータを算出する算出部をさらに備える、
請求項6乃至9のうちの何れか1項に記載の情報処理装置。 - 前記算出部は、前記複数の領域の各々について、該領域に対応する2以上の前記指示情報と1対1に対応する2以上の前記特徴点データが得られた場合、全ての前記指示情報と1対1に対応する複数の前記特徴点データに基づいて前記補正パラメータを算出する、
請求項10に記載の情報処理装置。 - 前記算出部は、前記複数の領域のうち、何れかの領域に対応する2以上の前記指示情報と1対1に対応する2以上の前記特徴点データが得られるたびに、その得られた2以上の前記特徴点データに基づいて前記補正パラメータを算出する、
請求項10に記載の情報処理装置。 - 前記指示情報は、前記被写体の位置および姿勢が、前記指示情報に対応する位置および姿勢と一致する場合に前記撮像画像に映り込むべき前記被写体の形状を表す情報であり、
前記制御部は、前記複数の領域の各々について、該領域に対応する2以上の前記指示情報のうちの少なくとも1つが表す前記被写体の形状は、該領域と、該領域に隣接する他の領域とに跨るよう、該領域に対応する2以上の前記指示情報を順次に生成する、
請求項4乃至12のうちの何れか1項に記載の情報処理装置。 - 撮像装置による撮像で得られた撮像画像を取得する取得ステップと、
複数の特徴点を有する被写体のかざし方を指示するための指示情報を前記撮像画像に重畳した重畳画像を、表示装置に表示する制御を行う制御ステップと、を含む、
情報処理方法。 - コンピュータに、
撮像装置による撮像で得られた撮像画像を取得する取得ステップと、
複数の特徴点を有する被写体のかざし方を指示するための指示情報を前記撮像画像に重畳した重畳画像を、表示装置に表示する制御を行う制御ステップと、を実行させるためのプログラム。 - 撮像装置と、情報処理装置と、表示装置とを含むシステムであって、
複数の特徴点を有する被写体のかざし方を指示するための指示情報を、前記撮像装置による撮像で得られた撮像画像に重畳した重畳画像を、前記表示装置に表示する制御を行う制御部を備える、
システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015059836A JP6682767B2 (ja) | 2015-03-23 | 2015-03-23 | 情報処理装置、情報処理方法、プログラムおよびシステム |
| US15/075,543 US9870616B2 (en) | 2015-03-23 | 2016-03-21 | Information processing device, information processing method, and system |
| EP16161712.1A EP3076336A1 (en) | 2015-03-23 | 2016-03-22 | Information processing device, information processing method, and system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015059836A JP6682767B2 (ja) | 2015-03-23 | 2015-03-23 | 情報処理装置、情報処理方法、プログラムおよびシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016181753A true JP2016181753A (ja) | 2016-10-13 |
| JP6682767B2 JP6682767B2 (ja) | 2020-04-15 |
Family
ID=55802171
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015059836A Active JP6682767B2 (ja) | 2015-03-23 | 2015-03-23 | 情報処理装置、情報処理方法、プログラムおよびシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9870616B2 (ja) |
| EP (1) | EP3076336A1 (ja) |
| JP (1) | JP6682767B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018007253A (ja) * | 2016-06-28 | 2018-01-11 | ダッソー システムズDassault Systemes | カメラを較正するコンピュータ実装方法 |
| JP2021513247A (ja) * | 2018-06-05 | 2021-05-20 | 上▲海▼商▲湯▼智能科技有限公司Shanghai Sensetime Intelligent Technology Co., Ltd. | 車載カメラ自己校正方法、車載カメラ自己校正装置、電子機器および記憶媒体 |
| JP2021093720A (ja) * | 2019-12-05 | 2021-06-17 | 株式会社デンソーウェーブ | 産業用カメラのキャリブレーション操作支援装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6747176B2 (ja) | 2016-08-25 | 2020-08-26 | 株式会社リコー | 画像処理装置、撮影装置、プログラム、機器制御システム及び機器 |
| CN108876863B (zh) * | 2018-07-25 | 2021-05-28 | 首都师范大学 | 高光谱相机成像校正方法及装置 |
| TWI720869B (zh) * | 2020-04-15 | 2021-03-01 | 致伸科技股份有限公司 | 相機模組之對位方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6437823B1 (en) * | 1999-04-30 | 2002-08-20 | Microsoft Corporation | Method and system for calibrating digital cameras |
| JP2007048113A (ja) * | 2005-08-11 | 2007-02-22 | Casio Comput Co Ltd | 画像読取装置及びその画像読取方法 |
| JP2007064684A (ja) * | 2005-08-29 | 2007-03-15 | Canon Inc | マーカ配置補助方法及び装置 |
| JP2010520560A (ja) * | 2007-03-08 | 2010-06-10 | マイクロスキャン システムズ インコーポレイテッド | 二次元コードの検出及びセグメント化 |
| JP2012115539A (ja) * | 2010-12-02 | 2012-06-21 | Konami Digital Entertainment Co Ltd | ゲーム装置、ゲーム装置の制御方法、及びプログラム |
| WO2012111664A1 (ja) * | 2011-02-15 | 2012-08-23 | 富士通フロンテック株式会社 | 認証装置、認証プログラム、および認証方法 |
| JP2014115939A (ja) * | 2012-12-12 | 2014-06-26 | Sony Corp | 情報処理装置、プログラム及び情報処理方法 |
| WO2014155814A1 (ja) * | 2013-03-27 | 2014-10-02 | 富士フイルム株式会社 | 撮像装置、キャリブレーション方法、プログラム及び記録媒体 |
| US20150091780A1 (en) * | 2013-10-02 | 2015-04-02 | Philip Scott Lyren | Wearable Electronic Device |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007276449A (ja) | 2006-03-15 | 2007-10-25 | Ricoh Co Ltd | 設定方法、画像記録装置、プログラム及び記録媒体 |
| JP2008100497A (ja) | 2006-09-19 | 2008-05-01 | Ricoh Co Ltd | 印写方法、画像形成装置、制御プログラム、当該プログラムを搭載した情報記録媒体、これらを具備する画像形成システム、印写用記録媒体、印写した記録物、及びインク |
| US7909253B2 (en) * | 2007-05-24 | 2011-03-22 | Northrop Grumman Systems Corporation | Image detection system and methods |
| JP5233188B2 (ja) | 2007-07-11 | 2013-07-10 | 株式会社リコー | 画像形成装置 |
| JP2009154499A (ja) | 2007-12-28 | 2009-07-16 | Ricoh Co Ltd | 画像形成方法、及びインクジェット記録装置 |
| US8416262B2 (en) * | 2009-09-16 | 2013-04-09 | Research In Motion Limited | Methods and devices for displaying an overlay on a device display screen |
| JP2012198031A (ja) | 2011-03-18 | 2012-10-18 | Ricoh Co Ltd | 画像補正方法及び画像補正装置 |
| CN103827917B (zh) | 2011-07-25 | 2017-06-09 | 科英布拉大学 | 用于使用棋盘图案的一幅或多幅图像的自动相机校准的方法和装置 |
| US20140263649A1 (en) * | 2013-03-14 | 2014-09-18 | Walter Gerard Antognini | Visualization through imaging of machine-recognizable graphic |
| US9986155B2 (en) | 2014-09-05 | 2018-05-29 | Htc Corporation | Image capturing method, panorama image generating method and electronic apparatus |
-
2015
- 2015-03-23 JP JP2015059836A patent/JP6682767B2/ja active Active
-
2016
- 2016-03-21 US US15/075,543 patent/US9870616B2/en not_active Expired - Fee Related
- 2016-03-22 EP EP16161712.1A patent/EP3076336A1/en not_active Withdrawn
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6437823B1 (en) * | 1999-04-30 | 2002-08-20 | Microsoft Corporation | Method and system for calibrating digital cameras |
| JP2007048113A (ja) * | 2005-08-11 | 2007-02-22 | Casio Comput Co Ltd | 画像読取装置及びその画像読取方法 |
| JP2007064684A (ja) * | 2005-08-29 | 2007-03-15 | Canon Inc | マーカ配置補助方法及び装置 |
| JP2010520560A (ja) * | 2007-03-08 | 2010-06-10 | マイクロスキャン システムズ インコーポレイテッド | 二次元コードの検出及びセグメント化 |
| JP2012115539A (ja) * | 2010-12-02 | 2012-06-21 | Konami Digital Entertainment Co Ltd | ゲーム装置、ゲーム装置の制御方法、及びプログラム |
| WO2012111664A1 (ja) * | 2011-02-15 | 2012-08-23 | 富士通フロンテック株式会社 | 認証装置、認証プログラム、および認証方法 |
| JP2014115939A (ja) * | 2012-12-12 | 2014-06-26 | Sony Corp | 情報処理装置、プログラム及び情報処理方法 |
| WO2014155814A1 (ja) * | 2013-03-27 | 2014-10-02 | 富士フイルム株式会社 | 撮像装置、キャリブレーション方法、プログラム及び記録媒体 |
| US20150091780A1 (en) * | 2013-10-02 | 2015-04-02 | Philip Scott Lyren | Wearable Electronic Device |
Non-Patent Citations (1)
| Title |
|---|
| "AprilCal : Assisted and repeatable camera calibration.", 2013 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS (IROS), JPN6018051907, 2013, ISSN: 0004103914 * |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018007253A (ja) * | 2016-06-28 | 2018-01-11 | ダッソー システムズDassault Systemes | カメラを較正するコンピュータ実装方法 |
| JP7195728B2 (ja) | 2016-06-28 | 2022-12-26 | ダッソー システムズ | カメラを較正するコンピュータ実装方法 |
| JP2021513247A (ja) * | 2018-06-05 | 2021-05-20 | 上▲海▼商▲湯▼智能科技有限公司Shanghai Sensetime Intelligent Technology Co., Ltd. | 車載カメラ自己校正方法、車載カメラ自己校正装置、電子機器および記憶媒体 |
| JP7082671B2 (ja) | 2018-06-05 | 2022-06-08 | 上▲海▼商▲湯▼智能科技有限公司 | 車載カメラ自己校正方法、車載カメラ自己校正装置、電子機器および記憶媒体 |
| JP2021093720A (ja) * | 2019-12-05 | 2021-06-17 | 株式会社デンソーウェーブ | 産業用カメラのキャリブレーション操作支援装置 |
| JP7583249B2 (ja) | 2019-12-05 | 2024-11-14 | 株式会社デンソーウェーブ | 産業用カメラのキャリブレーション操作支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160284088A1 (en) | 2016-09-29 |
| JP6682767B2 (ja) | 2020-04-15 |
| US9870616B2 (en) | 2018-01-16 |
| EP3076336A1 (en) | 2016-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6525570B2 (ja) | 画像表示システム、制御装置、制御方法及びプログラム | |
| JP6682767B2 (ja) | 情報処理装置、情報処理方法、プログラムおよびシステム | |
| JP7013896B2 (ja) | 投写システム、投写システムの制御方法、プロジェクター | |
| CN108028900B (zh) | 投影设备、投影方法和程序存储介质 | |
| JP2012159911A5 (ja) | ||
| JP2017050616A5 (ja) | ||
| JP2015135317A (ja) | 画像処理装置、システム、画像処理方法およびプログラム | |
| US20170142384A1 (en) | Image processing apparatus, image processing method, image projection system, and storage medium | |
| US10621694B2 (en) | Image processing apparatus, system, image processing method, calibration method, and computer-readable recording medium | |
| JP2017099616A5 (ja) | 医療システム、制御装置および制御方法、プログラム、並びに、手術システム | |
| JP6139141B2 (ja) | 外観画像生成方法及び外観画像生成装置 | |
| TWI584648B (zh) | 具有校正功能的影像擷取裝置與影像擷取裝置的校正方法 | |
| JP6969619B2 (ja) | 校正方法 | |
| US20170289493A1 (en) | Projection apparatus, image processing apparatus, and image processing method | |
| WO2015190031A1 (ja) | 情報処理装置、情報処理方法、プログラム、及び画像表示装置 | |
| WO2016194078A1 (ja) | 情報処理装置及びキャリブレーション方法及びキャリブレーション処理プログラム | |
| JP6175878B2 (ja) | 画像処理回路、画像処理装置及び画像処理方法 | |
| JP5955003B2 (ja) | 画像処理装置および画像処理方法、プログラム | |
| JP2014126943A (ja) | 画像中の対象物を検出するために画像処理を行う画像処理装置及び方法 | |
| JP2009104323A (ja) | マッピングテーブル生成装置、車両周辺画像生成装置およびマッピングテーブル生成方法 | |
| JP5845151B2 (ja) | あおり補正装置、あおり補正方法及びあおり補正用コンピュータプログラム | |
| WO2017033691A1 (ja) | 画像生成装置、画像生成方法、及びプログラム | |
| JP6307843B2 (ja) | 補間方法、プログラムおよび補間装置 | |
| JP6051592B2 (ja) | 画像処理装置および撮像装置 | |
| JP6317572B2 (ja) | 寸法測定装置、寸法測定方法及び校正用チャート |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150825 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200309 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6682767 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |