JP2016198738A - 液滴吐出方法、液滴吐出装置、プログラム - Google Patents
液滴吐出方法、液滴吐出装置、プログラム Download PDFInfo
- Publication number
- JP2016198738A JP2016198738A JP2015081650A JP2015081650A JP2016198738A JP 2016198738 A JP2016198738 A JP 2016198738A JP 2015081650 A JP2015081650 A JP 2015081650A JP 2015081650 A JP2015081650 A JP 2015081650A JP 2016198738 A JP2016198738 A JP 2016198738A
- Authority
- JP
- Japan
- Prior art keywords
- discharge
- droplet
- nozzles
- droplets
- nozzle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 76
- 239000000758 substrate Substances 0.000 claims abstract description 55
- 238000007599 discharging Methods 0.000 claims description 22
- 239000007788 liquid Substances 0.000 abstract description 21
- 239000011248 coating agent Substances 0.000 abstract description 2
- 238000000576 coating method Methods 0.000 abstract description 2
- 238000005259 measurement Methods 0.000 description 36
- 238000010586 diagram Methods 0.000 description 16
- 101000746134 Homo sapiens DNA endonuclease RBBP8 Proteins 0.000 description 11
- 101000969031 Homo sapiens Nuclear protein 1 Proteins 0.000 description 11
- 102100021133 Nuclear protein 1 Human genes 0.000 description 11
- 239000010408 film Substances 0.000 description 7
- 230000006870 function Effects 0.000 description 5
- 230000005499 meniscus Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 4
- 238000005303 weighing Methods 0.000 description 4
- 101000710013 Homo sapiens Reversion-inducing cysteine-rich protein with Kazal motifs Proteins 0.000 description 3
- 101000661807 Homo sapiens Suppressor of tumorigenicity 14 protein Proteins 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 101000911772 Homo sapiens Hsc70-interacting protein Proteins 0.000 description 2
- 101001139126 Homo sapiens Krueppel-like factor 6 Proteins 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000002940 repellent Effects 0.000 description 2
- 239000005871 repellent Substances 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 229910001111 Fine metal Inorganic materials 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- NBVXSUQYWXRMNV-UHFFFAOYSA-N fluoromethane Chemical compound FC NBVXSUQYWXRMNV-UHFFFAOYSA-N 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
- 238000005019 vapor deposition process Methods 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C—APPARATUS FOR APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C5/00—Apparatus in which liquid or other fluent material is projected, poured or allowed to flow on to the surface of the work
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C—APPARATUS FOR APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C11/00—Component parts, details or accessories not specifically provided for in groups B05C1/00 - B05C9/00
- B05C11/10—Storage, supply or control of liquid or other fluent material; Recovery of excess liquid or other fluent material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05D—PROCESSES FOR APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05D1/00—Processes for applying liquids or other fluent materials
- B05D1/26—Processes for applying liquids or other fluent materials performed by applying the liquid or other fluent material from an outlet device in contact with, or almost in contact with, the surface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
Landscapes
- Coating Apparatus (AREA)
- Application Of Or Painting With Fluid Materials (AREA)
Abstract
【課題】液滴の吐出量のばらつきを抑え、塗布ムラの発生をより抑制できる液滴吐出方法を提供する。【解決手段】複数のノズルを有する液滴吐出ヘッドと、複数の液滴着弾領域が配設された基板とを相対的に移動させながら、ノズルから液滴着弾領域内に液滴を吐出する液滴吐出方法であって、ノズルから液滴を連続吐出する際に、液滴の吐出順番に関する吐出量情報に基づいて記液滴の吐出量を補正する、液滴吐出方法。【選択図】図12
Description
本発明は、液滴吐出方法、液滴吐出装置、プログラムに関する。
近年、機能性材料を含む液滴を複数の微小ノズルから基板に対して吐出し、基板上に配置された液滴を固化して薄膜を形成することで、目的の描画像を描画する方法が提案されている。この薄膜の代表的な例として、カラーフィルター膜や、有機ELパネルの発光層等を挙げることができる。
特に有機ELパネル等の有機半導体の分野では、従来の蒸着プロセスでは、材料の使用効率が悪くコストがかかるという課題や、蒸着時の高温によりファインメタルマスクがずれ、成膜パターンの精度が低下するという課題を有しており、上述のようなインクジェット技術を利用した印刷方法に注目が集まっている。
インクジェット方式では、液滴着弾領域内に配置された液滴を乾燥固化することで、着色膜や発光層等の機能膜を形成するが、ノズル自体や使用状況による特性のばらつきによって液滴の吐出量が変化し、機能膜にムラが生じることがあった。例えば、特許文献1では、使用ノズル数やノズルの組み合わせによって生じる吐出量の変動を補正する方法が提案されている。
しかし、近年のより高精細な描画品位に対する要求に伴い、わずかなムラも問題となってきた。そのため、よりムラの発生を抑制できる液滴の吐出量制御が求められている。特に、一つの液滴着弾領域内に配置される総着弾数が10滴程度の有機半導体素子等では、1滴ごとの機能膜への寄与がより大きい。そのため、有機半導体素子等では、スジ状のムラがより発生しやすい。
本発明は、液滴の吐出量のばらつきを抑え、塗布ムラの発生をより抑制できる液滴吐出方法、液滴吐出装置、及びプログラムを提供することを目的の一つとする。
本発明の態様によれば、複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体とを相対的に移動させながら、前記複数のノズルから前記液滴着弾領域内に複数の液滴を吐出する液滴吐出方法であって、前記複数のノズルのうち少なくとも一つのノズルから前記複数の液滴を吐出する際に、前記複数の液滴の各々の吐出順番に関する吐出量情報に基づいて、前記複数の液滴の各々の吐出量を補正する、液滴吐出方法が提供される。
この方法によれば、複数の液滴を連続して吐出する際のノズルメニスカスの残留振動による液滴の吐出量のばらつきを補正することができ、均一な量で液滴を吐出することができる。
この方法によれば、複数の液滴を連続して吐出する際のノズルメニスカスの残留振動による液滴の吐出量のばらつきを補正することができ、均一な量で液滴を吐出することができる。
前記複数の液滴の吐出順番に関する吐出量情報は、前記液滴吐出ヘッドから媒体に対して液滴を連続吐出し、吐出ごとに前記媒体上の液滴の合計重量を測定する工程と、吐出ごとの前記合計重量の差分から、吐出順番ごとの液滴の吐出量を算出する工程と、前記吐出順番ごとの前記液滴の吐出量を比較し、前記吐出順番に対する吐出量の関数を導出する工程と、を含む工程により規定される吐出量の関数である方法としてもよい。
本発明の態様によれば、複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体とを相対的に移動させながら、前記複数のノズルの各々から前記液滴着弾領域内に液滴を吐出する液滴吐出方法であって、前記複数のノズルの各々から前記液滴を吐出する際に、前記複数のノズルのうち隣り合う前記ノズルの吐出状態に関する吐出量情報に基づいて前記液滴の吐出量を補正する、液滴吐出方法が提供される。
この方法によれば、隣り合うノズル同士の動作に伴う容量変化などの構造的クロストークによって生じる液滴の吐出量のばらつきを補正することができ、均一な量で液滴を吐出することができる。
この方法によれば、隣り合うノズル同士の動作に伴う容量変化などの構造的クロストークによって生じる液滴の吐出量のばらつきを補正することができ、均一な量で液滴を吐出することができる。
前記複数のノズルは、第1のノズルと、前記第1のノズルの両隣のノズルである第2のノズル、及び第3のノズルを含み、前記隣り合うノズルの吐出状態に関する吐出量情報は、第1のノズルの両隣の第2のノズル及び第3のノズルから液滴を吐出させない状態で前記第1のノズルから液滴を吐出して単独吐出時の吐出量を測定する工程と、第1のノズルと前記第2のノズルから同時に液滴を吐出して前記第1のノズルの吐出量を測定し、測定した前記第1のノズルの吐出量と前記単独吐出時の吐出量とを比較することで、単独吐出時の吐出量に対する片側同時吐出時の吐出量の関数を取得する工程と、前記第1から第3のノズルから同時に液滴を吐出して前記第1のノズルの吐出量を測定し、測定した前記第1のノズルの吐出量と前記単独吐出時の吐出量とを比較することで、単独吐出時の吐出量に対する両側同時吐出時の吐出量の関数を取得する工程と、を含む工程により規定される吐出量の関数である方法としてもよい。
前記複数のノズルの各々から前記液滴を吐出する際に、前記複数のノズルのうち同時に液滴を吐出する前記ノズルの数に関する吐出量情報に基づいて前記液滴の吐出量を補正する方法としてもよい。
この方法によれば、使用ノズル数の変化に伴う吐出量のばらつきを補正することができる。
この方法によれば、使用ノズル数の変化に伴う吐出量のばらつきを補正することができる。
前記液滴吐出ヘッドは、前記複数のノズルの各々に設けられた駆動素子と、前記駆動素子に駆動電圧を供給する複数の駆動回路と、前記駆動素子と前記駆動回路とを選択接続する選択回路と、を有しており、前記複数のノズルの各々から前記液滴を吐出する際に、前記駆動素子に接続される前記駆動回路に関する吐出情報に基づいて前記液滴の吐出量を補正する方法としてもよい。
この方法によれば、駆動回路の個体差に起因する吐出量のばらつきを補正することができる。
この方法によれば、駆動回路の個体差に起因する吐出量のばらつきを補正することができる。
前記液滴吐出ヘッドは、前記複数のノズルの各々に設けられた駆動素子と、前記駆動素子に駆動電圧を供給する複数の駆動回路と、前記駆動素子と前記駆動回路とを選択接続する選択回路と、を有しており、前記複数のノズルの各々から前記液滴を吐出する際に、前記駆動回路ごとの前記駆動素子の接続数に関する吐出情報に基づいて前記液滴の吐出量を補正する方法としてもよい。
この方法によれば、駆動回路ごとの駆動ノズル数の差に伴う吐出量のばらつきを補正することができる。
この方法によれば、駆動回路ごとの駆動ノズル数の差に伴う吐出量のばらつきを補正することができる。
本発明の態様によれば、複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体を支持するステージと、前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、前記複数のノズルのうち少なくとも一つのノズルから複数の液滴を吐出する際に、前記複数の液滴の各々の吐出順番に関する吐出量情報に基づいて、前記複数の液滴の各々の吐出量を補正する制御装置と、を有する、液滴吐出装置が提供される。
この構成によれば、連続吐出時のノズルメニスカスの残留振動による液滴の吐出量のばらつきを補正することができ、均一な量で液滴を吐出することができる液滴吐出装置が提供される。
この構成によれば、連続吐出時のノズルメニスカスの残留振動による液滴の吐出量のばらつきを補正することができ、均一な量で液滴を吐出することができる液滴吐出装置が提供される。
本発明の態様によれば、複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体を支持するステージと、前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、前記複数のノズルの各々から吐出する液滴の吐出量を、前記複数の液滴の各々のうち隣り合う前記ノズルの吐出状態に関する吐出量情報に基づいて補正する制御装置と、を有する、液滴吐出装置が提供される。
この構成によれば、隣り合うノズル同士の動作に伴う容量変化などの構造的クロストークによって生じる液滴の吐出量のばらつきを補正することができ、均一な量で液滴を吐出することができる液滴吐出装置が提供される。
この構成によれば、隣り合うノズル同士の動作に伴う容量変化などの構造的クロストークによって生じる液滴の吐出量のばらつきを補正することができ、均一な量で液滴を吐出することができる液滴吐出装置が提供される。
本発明の態様によれば、複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体を支持するステージと、前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、前記複数のノズルの各々から吐出する液滴の吐出量を、前記複数の液滴の各々のうち同時に液滴を吐出する前記ノズルの数に関する吐出量情報に基づいて前記液滴の吐出量を補正する制御装置と、を有する、液滴吐出装置が提供される。
この構成によれば、使用ノズル数の変化に伴う吐出量のばらつきを補正することができる。
この構成によれば、使用ノズル数の変化に伴う吐出量のばらつきを補正することができる。
本発明の態様によれば、複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体を支持するステージと、前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、を備え、前記液滴吐出ヘッドは、前記ノズルの各々に設けられた駆動素子と、前記駆動素子に駆動電圧を供給する複数の駆動回路と、前記駆動素子と前記駆動回路とを選択接続する選択回路と、を有し、前記ノズルから前記液滴を吐出する際に、前記駆動素子に接続される前記駆動回路に関する吐出情報に基づいて前記液滴の吐出量を補正する制御装置を有する、液滴吐出装置が提供される。
この構成によれば、駆動回路の個体差に起因する吐出量のばらつきを補正することができる。
この構成によれば、駆動回路の個体差に起因する吐出量のばらつきを補正することができる。
本発明の態様によれば、複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体を支持するステージと、前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、を備え、前記液滴吐出ヘッドは、前記ノズルの各々に設けられた駆動素子と、前記駆動素子に駆動信号を供給する複数の駆動回路と、前記駆動素子と前記駆動回路とを選択接続する駆動信号選択回路と、を有し、前記ノズルから前記液滴を吐出する際に、前記駆動回路ごとの前記駆動素子の接続数に関する吐出情報に基づいて前記液滴の吐出量を補正する制御装置を有する、液滴吐出装置が提供される。
この構成によれば、駆動回路ごとの駆動ノズル数の差に伴う吐出量のばらつきを補正することができる。
この構成によれば、駆動回路ごとの駆動ノズル数の差に伴う吐出量のばらつきを補正することができる。
本発明の態様によれば、複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体とを相対的に移動させながら、前記ノズルから前記液滴着弾領域内に液滴を吐出する動作をコンピューターに実行させるプログラムであって、上記の吐出量の補正動作を実行するステップを有する、プログラムが提供される。
この構成によれば、液滴吐出装置における吐出量ばらつきを効果的に補正することができる。
この構成によれば、液滴吐出装置における吐出量ばらつきを効果的に補正することができる。
以下、図面を用いて本発明の実施の形態について説明する。
なお、本発明の範囲は、以下の実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で任意に変更可能である。また、以下の図面においては、各構成をわかりやすくするために、実際の構造と各構造における縮尺や数等を異ならせる場合がある。
なお、本発明の範囲は、以下の実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で任意に変更可能である。また、以下の図面においては、各構成をわかりやすくするために、実際の構造と各構造における縮尺や数等を異ならせる場合がある。
(基板(基体))
本実施形態の液滴吐出方法において使用される基板(基体)について、図1および図2を参照して説明する。図1は液滴が吐出される基板の平面図である。図2は、液滴が吐出される基板の断面図である。
本実施形態の液滴吐出方法において使用される基板(基体)について、図1および図2を参照して説明する。図1は液滴が吐出される基板の平面図である。図2は、液滴が吐出される基板の断面図である。
図1、図2に示す基板1はカラー表示装置に用いられる。基板1は、R(赤)、G(緑)、B(青)を構成する複数の液滴着弾領域(例えば、画素)2と、液滴着弾領域2の間の領域に形成されたバンク3とを有する。図1に示す例では、液滴着弾領域2は、いわゆるストライプ配列であるが、デルタ配列やモザイク配列であってもよい。液滴着弾領域2は矩形に限られず、三角形状、ハニカム形状等でもよい。
基板1は、例えばガラスからなる基板本体4を有する。基板本体4上にバンク3によって区画された複数の区画領域6が形成されている。これらのバンク3により囲まれた区画領域6内に、液滴を吐出することで、各液滴着弾領域2内に着色膜や発光層を形成する。バンク3の下部には、遮光材料からなる遮光部5が形成されていてもよい。本実施形態の場合、複数の区画領域6は、全て同じ形状、大きさである。
基板1において、液滴着弾領域2の露出面に親液化処理を施してもよい。またバンク3の表面に撥液化処理を施してもよい。バンク3の撥液化処理は、例えば、酸素やフッ化炭素のプラズマ表面処理により実現できる。このように選択的に親液化領域(液滴着弾領域2の露出面)と撥液化領域(バンク3の表面)を形成することで、基板1に着弾した液滴が液滴着弾領域2の外に溢れるのを抑制することができる。
(液滴吐出装置)
次に、液滴吐出装置の構成について図3及び図4を参照して説明する。図3は、液滴吐出装置の要部を示す斜視図である。図4は、ヘッドユニットにおける液滴吐出ヘッドの配置構成を示す平面図である。
次に、液滴吐出装置の構成について図3及び図4を参照して説明する。図3は、液滴吐出装置の要部を示す斜視図である。図4は、ヘッドユニットにおける液滴吐出ヘッドの配置構成を示す平面図である。
図3に示す液滴吐出装置200は、直線的に設けられた1対のガイドレール201と、ガイドレール201の内部に設けられたエアスライダーとリニアモーター(図示せず)により主走査方向に移動する主走査移動台203とを備えている。また液滴吐出装置200は、ガイドレール201の上方においてガイドレール201に直交するように直線的に設けられた1対のガイドレール202と、ガイドレール202の内部に設けられたエアスライダとリニアモーター(図示せず)により副走査方向に沿って移動する副走査移動台204とを備えている。
主走査移動台203上には、基板1を載置するためのステージ205が設けられている。ステージ205は前述の基板1を吸着固定する機構を有する。ステージ205は、回転機構207によって基板1内の基準軸を主走査方向、副走査方向に位置合わせする。
副走査移動台204は、回転機構208を介して吊り下げ式に取り付けられたキャリッジ209を備えている。キャリッジ209は、複数の液滴吐出ヘッド11,12(図4参照)を備えるヘッドユニット10と、液滴吐出ヘッド11,12に液滴を供給するための液滴供給機構(図示せず)と、液滴吐出ヘッド11,12の電気的な駆動制御を行うための制御回路基板30(図5参照)とを備えている。
図4に示すように、ヘッドユニット10は、R,G,Bに対応した液滴をノズル20から吐出する液滴吐出ヘッド11,12を備えており、液滴吐出ヘッド11,12における複数のノズル20はノズル群21A,21Bを構成している。ノズル群21A,21Bは、それぞれ所定のピッチ(例えば180DPI)のライン配列をなしており、さらに合わせて千鳥配列をなす配置とされる。また、ノズル群21A,21Bの配列の方向は副走査方向に一致する。
液滴吐出ヘッド11と液滴吐出ヘッド12とは互いに副走査方向に位置をずらして配置され、それぞれのノズル群21A,21Bが、互いに吐出可能範囲を補完して連続した定ピッチの走査軌跡を描く。また、ノズル群21A,21Bの端部の数個分のノズル20は、その特性の特異性に鑑みて使用されないダミーノズルである。
液滴吐出ヘッド11,12内におけるノズル20に連通する液室(キャビティ)は、圧電素子16(図5参照)の駆動によって容積が可変する。圧電素子16に駆動信号を供給してキャビティ内の容積を制御することで、キャビティ内の液圧を制御し、ノズル20から液滴を吐出させる。
このように液滴吐出装置200では、主走査移動台203の移動によりノズル群21A,21Bを基板1に対して主走査方向に走査させると共に、ノズル20毎の吐出のON/OFF制御(以下、吐出制御とする)を行うことにより、基板1上におけるノズル20の走査軌跡に沿った位置に液滴を配置することができる。
なお、液滴吐出装置の構成は上述の態様に限定されるものではない。例えば、ノズル群21A,21Bの配列方向を副走査方向から傾けて、ノズル20の走査軌跡のピッチがノズル群21A,21B内におけるノズル20間のピッチに対して狭くなるように構成することもできる。また、ヘッドユニット10における液滴吐出ヘッド11,12の数やその配置構成なども適宜変更することができる。また、液滴吐出ヘッド11,12の駆動方式として、例えば、キャビティに加熱素子を備えたいわゆるサーマル方式などを採用することもできる。
(液滴吐出装置の電気的構成および電気的動作)
次に、図5、図6を参照して、本発明に係る液滴吐出装置の電気的な構成および動作について説明する。
図5は、液滴吐出ヘッドの駆動に係る液滴吐出装置の電気的構成を示す図である。図6は、駆動信号および制御信号のタイミング図である。
次に、図5、図6を参照して、本発明に係る液滴吐出装置の電気的な構成および動作について説明する。
図5は、液滴吐出ヘッドの駆動に係る液滴吐出装置の電気的構成を示す図である。図6は、駆動信号および制御信号のタイミング図である。
図5に示すように、液滴吐出ヘッド11(12)は、ノズル群21A(21B)のノズル20(図4参照)毎に設けられた圧電素子16と、各圧電素子16への駆動信号COMの供給/非供給の切り替えを行うためのスイッチング回路17と、各圧電素子16へ駆動信号を供給する信号ラインCOM1〜COM4を選択するための駆動信号選択回路18と、を備えている。液滴吐出ヘッド11(12)は、制御回路基板30と電気的に接続されている。
制御回路基板30は、それぞれ独立した駆動信号COMを生成するD/Aコンバーター(DAC)からなる駆動回路31A〜31Dと、駆動回路31A〜31Dが生成する駆動信号COMのスルーレートデータ(波形データWD1〜波形データWD4)の格納メモリーを内部に有する波形データ選択回路32と、外部から受信される吐出制御データを格納するためのデータメモリー33と、を備えている。制御回路基板30における信号ラインCOM1〜COM4には、駆動回路31A〜31Dで生成された駆動信号がそれぞれ出力される。
ノズル群21A(21B)において、圧電素子16の一方の電極16cは、駆動回路31A〜31Dのグランドライン(GND)に接続されている。また、圧電素子16の他方の電極(以下、セグメント電極16sとする)は、スイッチング回路17、駆動信号選択回路18を介して、信号ラインCOM1〜COM4に接続されている。スイッチング回路17、駆動信号選択回路18、波形データ選択回路32には、クロック信号(CLK)や各吐出タイミングに対応したラッチ信号(LAT)が入力される。
データメモリー33には、液滴吐出ヘッド11(12)の走査位置に応じて周期的に設定される吐出タイミング毎に、以下のデータが格納されている。
(1)圧電素子16への駆動信号COMの供給/非供給(ON/OFF)の切り替えを規定する吐出データ(SIA)
(2)各圧電素子16に対応した信号ラインCOM1〜COM4を規定する駆動信号選択データ(SIB)
(3)駆動回路31A〜31Dに入力される波形データWD1〜WD4の種別を規定する波形番号データ(WN)
(1)圧電素子16への駆動信号COMの供給/非供給(ON/OFF)の切り替えを規定する吐出データ(SIA)
(2)各圧電素子16に対応した信号ラインCOM1〜COM4を規定する駆動信号選択データ(SIB)
(3)駆動回路31A〜31Dに入力される波形データWD1〜WD4の種別を規定する波形番号データ(WN)
本実施形態においては、吐出データ(SIA)は、1ノズルあたり1ビット(0,1)、駆動信号選択データ(SIB)は、1ノズルあたり2ビット(0,1,2,3)、波形番号データ(WN)は、1D/Aコンバーターあたり7ビット(0〜127)で構成されている。これらのデータ構造については適宜変更が可能である。
上述の構成において、各吐出タイミングに係る駆動制御は次のように行われる。
図6に示すタイミングt1〜t2の期間において、吐出データ(SIA)、駆動信号選択データ(SIB)、波形番号データ(WN)が、それぞれシリアル信号化されて、スイッチング回路17、駆動信号選択回路18、波形データ選択回路32に送信される。
図6に示すタイミングt1〜t2の期間において、吐出データ(SIA)、駆動信号選択データ(SIB)、波形番号データ(WN)が、それぞれシリアル信号化されて、スイッチング回路17、駆動信号選択回路18、波形データ選択回路32に送信される。
タイミングt2において各データがラッチされることで、吐出(ON)に係る各圧電素子16のセグメント電極16sが、駆動信号選択データ(SIB)で指定された各信号ラインCOM1〜COM4に接続された状態となる。例えば、駆動信号選択データ(SIB)が0,1,2,3である場合、対応する圧電素子16のセグメント電極16sはそれぞれ信号ラインCOM1、信号ラインCOM2、信号ラインCOM3、信号ラインCOM4に接続される。また、駆動回路31A〜31Dの生成に係る駆動信号の波形データWD1〜WD4が設定される。
タイミングt3〜t4、t4〜t5、t5〜t6の各期間においては、タイミングt2で設定された波形データに従い、それぞれ電位上昇、電位保持、電位降下の一連のステップで駆動信号COMが生成される。そして、信号ラインCOM1〜COM4とそれぞれ接続された状態にある圧電素子16に、生成された駆動信号が供給され、ノズルに連通するキャビティの容積(圧力)制御が行われる。
ここで、タイミングt3〜t4における電位上昇成分はキャビティを膨張させ、インクをノズル内方に引き込む役割を果たす。また、タイミングt5〜t6における電位降下成分は、キャビティを収縮させ、インクをノズル外に押し出して吐出させる役割を果たす。
駆動信号COMにおける電位上昇、電位保持、電位降下に係る時間成分、電圧成分は、その供給によって吐出される液滴の吐出量に密接に依存している。とりわけ、圧電方式のヘッドでは、電圧成分の変化に対して吐出量が良好な線形性を示すため、タイミングt3〜t6における電圧差を駆動電圧Vhとして規定し、これを吐出量制御の条件として利用することができる。
なお、駆動信号COMは、本実施形態で示すような単純な台形波に限られるものではなく、公知の様々な形状のものを適宜採用することができる。また、異なる駆動方式(例えばサーマル方式)を採用する場合などにおいて、駆動信号のパルス幅(時間成分)を吐出量制御の条件として利用することも可能である。
本実施形態では、駆動電圧Vhを段階的に違えた複数種の波形データを用意し、駆動回路31A〜31Dにそれぞれ独立した波形データWD1〜WD4を入力することにより、各信号ラインCOM1〜COM4にそれぞれ異なる駆動電圧Vhの駆動信号COMを出力することが可能である。用意できる波形データの種類は、波形番号データ(WN)の情報量(7ビット)に相当する128種類であり、例えばこれを0.1V刻みの駆動電圧Vhに対応させている。
本実施形態の液滴吐出装置200は、ノズルに対応して設けられる圧電素子16と信号ラインCOM1〜COM4との対応関係を規定する駆動信号選択データ(SIB)と、各信号ラインCOM1〜COM4と駆動信号の種類(駆動電圧Vh)との対応関係を規定する波形番号データ(WN)とを適宜に設定することにより、ノズルから吐出する液滴の吐出量を制御することができる。
なお、本実施形態の液滴吐出装置200では、吐出タイミングごとに駆動信号選択データ(SIB)と波形番号データ(WN)を更新可能な構成であるから、吐出データ(SIA)の変化に対応させて駆動信号を精細に設定することも可能である。
なお、本実施形態の液滴吐出装置200では、吐出タイミングごとに駆動信号選択データ(SIB)と波形番号データ(WN)を更新可能な構成であるから、吐出データ(SIA)の変化に対応させて駆動信号を精細に設定することも可能である。
(液滴吐出方法)
次に、図7〜図12を参照して、本実施形態の液滴吐出方法について説明する。
図7は、駆動信号の設定を行うための装置構成を示すブロック図である。図8は、本実施形態の液滴吐出方法を示すフローチャートである。図9は、基準吐出量を規定する工程の説明図である。図10は、ノズル毎の吐出量の分布を示すグラフである。図11は、液滴の吐出量に対する隣り合うノズルの影響に関する説明図である。図12は、連続吐出したときの吐出量変動に関する説明図である。
次に、図7〜図12を参照して、本実施形態の液滴吐出方法について説明する。
図7は、駆動信号の設定を行うための装置構成を示すブロック図である。図8は、本実施形態の液滴吐出方法を示すフローチャートである。図9は、基準吐出量を規定する工程の説明図である。図10は、ノズル毎の吐出量の分布を示すグラフである。図11は、液滴の吐出量に対する隣り合うノズルの影響に関する説明図である。図12は、連続吐出したときの吐出量変動に関する説明図である。
[駆動信号の設定装置]
図7において、駆動信号の設定を行うための設定装置300は、液滴吐出ヘッド11(12)にインクを供給するインク供給装置301と、液滴吐出ヘッド11を駆動する制御回路基板302とを備える。設定装置300は、液滴吐出ヘッド11から吐出されたインクを受けてこれを収容するインク受容容器303と、インク受容容器303の重量を計量する重量計量装置304とを備える。設定装置300は、液滴吐出ヘッド11から吐出されたインクを受けるインク受容基板305と、インク受容基板305を基板面方向に移動させる基板移動装置306と、インク受容基板305上に配置されたインクの体積を測定する体積測定装置307とを備える。設定装置300は、制御回路基板302を介して液滴吐出ヘッド11の駆動を制御し、基板移動装置306の駆動を制御し、重量計量装置304および体積測定装置307の計量動作を制御し、計量結果を基に演算を行うコンピューター308を備えている。
図7において、駆動信号の設定を行うための設定装置300は、液滴吐出ヘッド11(12)にインクを供給するインク供給装置301と、液滴吐出ヘッド11を駆動する制御回路基板302とを備える。設定装置300は、液滴吐出ヘッド11から吐出されたインクを受けてこれを収容するインク受容容器303と、インク受容容器303の重量を計量する重量計量装置304とを備える。設定装置300は、液滴吐出ヘッド11から吐出されたインクを受けるインク受容基板305と、インク受容基板305を基板面方向に移動させる基板移動装置306と、インク受容基板305上に配置されたインクの体積を測定する体積測定装置307とを備える。設定装置300は、制御回路基板302を介して液滴吐出ヘッド11の駆動を制御し、基板移動装置306の駆動を制御し、重量計量装置304および体積測定装置307の計量動作を制御し、計量結果を基に演算を行うコンピューター308を備えている。
制御回路基板302は、図4に示した制御回路基板30に対応する。インク受容容器303は、インクに侵食されない材質のものであれば何でも良いが、開口部にスポンジ等の多孔質部材を配設するなどして、インクの揮発を抑える構成となっていることが好ましい。重量計量装置304には、一般的な電子天秤を用いることができる。また、体積測定装置307には、白色干渉法を用いた三次元形状測定装置などを用いることができる。
設定装置300は、重量計量装置304と体積測定装置307の二種類の計測装置を用い、吐出量を重量または体積として測定することができる。重量計量装置304は、ノズル群全体における平均的な吐出量を高速かつ高精度に測定するのに適している。体積測定装置307は、ノズル個々の吐出量を測定するのに適している。
[液滴吐出方法の詳細]
次に、本実施形態の液滴吐出方法について具体的に説明する。
図8に示すように、本実施形態の液滴吐出方法は、液滴吐出装置における各ノズルの吐出情報を測定する吐出情報測定工程ST1と、吐出情報測定工程で測定した吐出情報に基づいて吐出量を設定する吐出量設定工程ST2とを含む。吐出情報測定工程ST1は、いわゆる初期設定の工程であり、液滴吐出ヘッドの交換時やインクの種類を変更したときに実行すればよい。すなわち、製品用の基板への液滴の吐出動作に際しては、吐出情報測定工程ST1で測定された吐出情報に基づいて、吐出量設定工程ST2のみを実行すればよい。
次に、本実施形態の液滴吐出方法について具体的に説明する。
図8に示すように、本実施形態の液滴吐出方法は、液滴吐出装置における各ノズルの吐出情報を測定する吐出情報測定工程ST1と、吐出情報測定工程で測定した吐出情報に基づいて吐出量を設定する吐出量設定工程ST2とを含む。吐出情報測定工程ST1は、いわゆる初期設定の工程であり、液滴吐出ヘッドの交換時やインクの種類を変更したときに実行すればよい。すなわち、製品用の基板への液滴の吐出動作に際しては、吐出情報測定工程ST1で測定された吐出情報に基づいて、吐出量設定工程ST2のみを実行すればよい。
<吐出情報測定工程>
吐出情報測定工程ST1は、使用ノズル数に関する吐出情報D1の測定工程ST11と、隣り合うノズルの吐出状態に関する吐出情報D2の測定工程ST12と、連続吐出時の吐出順番に関する吐出情報D3の測定工程ST13と、駆動回路の個体差に関する吐出情報D4の測定工程ST14と、駆動回路の負荷状態に関する吐出情報D5の測定工程ST15と、を含む。
吐出情報測定工程ST1は、使用ノズル数に関する吐出情報D1の測定工程ST11と、隣り合うノズルの吐出状態に関する吐出情報D2の測定工程ST12と、連続吐出時の吐出順番に関する吐出情報D3の測定工程ST13と、駆動回路の個体差に関する吐出情報D4の測定工程ST14と、駆動回路の負荷状態に関する吐出情報D5の測定工程ST15と、を含む。
<使用ノズル数に関する吐出情報D1>
使用ノズル数に関する吐出情報D1の測定工程ST11では、使用ノズル数に応じた各ノズルの吐出量の分布を測定する。また、測定工程ST11では、各ノズルの平均的な吐出量も算出する。測定工程S11は、液滴吐出ヘッド全体の吐出量平均を測定する工程S1と、基準駆動電圧Vsを算出する工程S2と、相関係数αを算出する工程S3と、各ノズルの吐出量を測定する工程S4と、各ノズルの吐出量の平均値を算出する工程S5と、を含む。
使用ノズル数に関する吐出情報D1の測定工程ST11では、使用ノズル数に応じた各ノズルの吐出量の分布を測定する。また、測定工程ST11では、各ノズルの平均的な吐出量も算出する。測定工程S11は、液滴吐出ヘッド全体の吐出量平均を測定する工程S1と、基準駆動電圧Vsを算出する工程S2と、相関係数αを算出する工程S3と、各ノズルの吐出量を測定する工程S4と、各ノズルの吐出量の平均値を算出する工程S5と、を含む。
まず、吐出量平均を測定する工程S1では、液滴吐出ヘッド11を設定装置300に取り付けた状態において、ノズル群21A内の全てのノズル20(ダミーノズルを除く)における吐出量平均を測定する。具体的には、各ノズル20についてまとまった回数(例えば10万回)の吐出を行い、その総重量を重量計量装置304で計量し、計量結果を除算して測定する。この測定は、2条件の駆動電圧Vh(例えば、20Vと30V)の下でそれぞれ行う。
次に、基準駆動電圧Vsを算出する工程S2では、工程S1で測定した2条件における駆動電圧Vhと吐出量平均との関係を線形補完して、基準吐出量q0(仕様に応じた設計値)の吐出量平均を得るための基準駆動電圧Vsを算出する。相関係数αを算出する工程S3では、駆動電圧Vhに対する吐出量平均の変化率を、吐出量を駆動電圧Vhによって補正する際の相関係数αとして算出する。
次に、各ノズルの吐出量を測定する工程S4では、ノズル群21Aの全圧電素子に対して複数条件の駆動信号を供給して、インク受容基板305に対しインクの吐出を行い、各ノズル20の吐出量を測定する。例えば、図9に示す6つの吐出パターンでインクの吐出を行う。
図9において、(a)は、1つおきのノズル20から1回ずつ液滴を吐出する吐出パターン(1/2Duty,1Shot)、(b)は、2つおきのノズル20から1回ずつ液滴を吐出する吐出パターン(1/3Duty,1Shot)、(c)は、1つおきのノズル20から液滴を2連続吐出する吐出パターン(1/2Duty,2Shot)、(d)は2つおきのノズル20から液滴を2連続吐出する吐出パターン(1/3Duty,2Shot)、(e)は1つおきのノズル20から液滴を3連続吐出する吐出パターン(1/2Duty,3Shot)、(f)は2つおきのノズル20から液滴を3連続吐出する吐出パターン(1/3Duty,3Shot)である。
インク受容基板305の表面には撥液処理がされているため、各ノズルから吐出されたインクは、それぞれ基板上において独立した半球状の液滴を形成する。そして、この液滴の三次元形状を体積測定装置307で測定し、コンピューター308で測定データを解析することで、吐出量が得られる。
次に、各ノズルの吐出量の平均値を算出する工程S5では、工程S4で測定した各ノズルの吐出量のデータから、各ノズル20の吐出量の平均値又は中央値を算出する。図9に示した6つの吐出パターンでは、使用ノズル数ごと(1/2Duty、1/3Duty)に吐出量の平均値又は中央値を算出する。なお、以下の説明では、各ノズル20の吐出量の平均値を算出した場合を例に挙げて説明するが、各ノズルの吐出量の中央値を算出した場合も同様である。
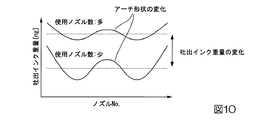
工程S5で算出された各ノズルの吐出量の平均値をノズル列の並び方向での空間分布として示すと例えば図10のようになる。図10に示す例の場合、ノズル列の端部付近で吐出量が相対的に多く、ノズル列の中央付近で吐出量が相対的に少ない分布である。また、吐出時の使用ノズル数が多い条件(例えば図9の1/2Duty)では、使用ノズル数が少ない条件(例えば図9の1/3Duty)と比較して吐出量が相対的に多くなる。なお、図10は吐出量分布の一例であり、吐出量の分布は図示以外の形状であってもよい。
以上により、使用ノズル数に関する吐出情報D1を取得することができる。
液滴吐出ヘッドのノズルから被吐出物にインクを吐出する場合、図1に示した基板1のように、バンク3で区画され所定の間隔で配列された液滴着弾領域2に対して、一方向に配列された複数のノズルから液滴を吐出する。液滴着弾領域2のピッチは製品によって異なるため、インクの吐出に使用されるノズル(吐出ノズル)と、吐出に使用されないノズル(非吐出ノズル)が必然的に発生する。この場合、走査ごとに吐出ノズルと非吐出ノズルとが変わることになり、全てのノズルが同時に使用されることはない。また、製品の種類が変わった場合にも走査ごとに吐出ノズルと非吐出ノズルが変わることになる。
液滴吐出ヘッドのノズルから被吐出物にインクを吐出する場合、図1に示した基板1のように、バンク3で区画され所定の間隔で配列された液滴着弾領域2に対して、一方向に配列された複数のノズルから液滴を吐出する。液滴着弾領域2のピッチは製品によって異なるため、インクの吐出に使用されるノズル(吐出ノズル)と、吐出に使用されないノズル(非吐出ノズル)が必然的に発生する。この場合、走査ごとに吐出ノズルと非吐出ノズルとが変わることになり、全てのノズルが同時に使用されることはない。また、製品の種類が変わった場合にも走査ごとに吐出ノズルと非吐出ノズルが変わることになる。
したがって、ノズルから基板1上にインクを吐出する際には、走査ごとに使用ノズル数が変化する。使用ノズル数が変化すると、図10に示したようにノズルからの吐出量が変化するため、液滴着弾領域2に対して常に一定量のインクを吐出するには、走査ごとに各ノズルの吐出量を補正する必要が生じる。測定工程ST11で取得した吐出情報D1に基づけば、使用ノズル数に応じた吐出量を補正することができ、またノズル位置ごとの吐出量のばらつきも補正することができる。
<隣り合うノズルの吐出状態に関する吐出情報D2>
次に、隣り合うノズルの吐出状態に関する吐出情報D2の測定工程ST12について、図11を参照しつつ説明する。測定工程ST12では、液滴を吐出する際に、ノズル列内の隣のノズルが同時に吐出している場合における吐出量の変化を測定する。
ノズル列内の隣り合うノズルには、圧電素子16やノズルに連通するキャビティの振動に起因して構造的なクロストークが生じる。そのため、ノズル列方向に連続する2つ以上のノズルから同時に液滴が吐出されると、上記クロストークの影響により吐出量が変化する。
次に、隣り合うノズルの吐出状態に関する吐出情報D2の測定工程ST12について、図11を参照しつつ説明する。測定工程ST12では、液滴を吐出する際に、ノズル列内の隣のノズルが同時に吐出している場合における吐出量の変化を測定する。
ノズル列内の隣り合うノズルには、圧電素子16やノズルに連通するキャビティの振動に起因して構造的なクロストークが生じる。そのため、ノズル列方向に連続する2つ以上のノズルから同時に液滴が吐出されると、上記クロストークの影響により吐出量が変化する。
図11(a)は、ノズル20aのみから液滴を吐出する単独吐出時の液滴の大きさを示す模式図である。図11(b)は、ノズル20aとその右隣のノズル20bから液滴を吐出する片側同時吐出時の液滴の大きさを示す模式図である。図11(c)は、ノズル20aとその両隣のノズル20b、ノズル20cから液滴を吐出する両側同時吐出時の液滴の大きさを示す模式図である。図11(d)は、ノズル20bのさらに外側のノズル20dを含む4つのノズル20a〜20dから同時に液滴を吐出するときの液滴の大きさを示す模式図である。
図11(b)に示すように、ノズル20aとその隣のノズル20bから同時に吐出したときの液滴120Bは、図11(a)に示すノズル20aのみから液滴を吐出させた場合の液滴120Aよりも小さくなる。図11(b)において、ノズル20a、20bから吐出される液滴の大きさはほぼ同等である。
さらに図11(c)に示すように連続する3つのノズル20a、20b、20cから同時に吐出したときの液滴は、ノズルの位置により異なる。両端のノズル20b、20cから吐出される液滴は、図11(b)と同様の大きさの液滴120Bである。一方、2つのノズル20b、20cに挟まれたノズル20aから吐出される液滴120Cは、ノズル20b、20cから吐出される液滴120Bよりも小さい。
すなわち、ノズル20aから吐出される液滴は、単独吐出時に最も大きい液滴120Aとなり、片側同時吐出時にはやや小さい液滴120Bとなり、両側同時吐出時に最も小さい液滴120Cとなる。ノズル列方向に連続する4つ以上のノズルから同時に吐出する場合にも上記の関係が適用される。すなわち、図11(d)に示すように、両側同時吐出時のノズル20a、20bからは最も小さい液滴120Cが吐出され、片側同時吐出時のノズル20c、20dからはやや小さい液滴120Bが吐出される。5つ以上のノズルが連続する場合にも同様である。
測定工程ST12では、少なくとも図11(a)〜(c)の3つの吐出パターンについて、液滴吐出ヘッド11の各ノズルからインク受容基板305への吐出動作を実施する。インク受容基板305に着弾した液滴を体積測定装置307で測定することにより、液滴120A、120B、120Cの各吐出量を計測する。以上により、隣り合うノズルの吐出状態に関する吐出情報D2を取得することができる。
吐出情報D2は、液滴120A、120B、120Cの体積比率(吐出量比率)として取得される。例えば、液滴120Aを100%としたとき、液滴120Bが95%、液滴120Cが92%、のように取得される。測定工程ST12で取得した吐出情報D2に基づけば、隣り合うノズルの吐出状態に応じて変動するノズルからの吐出量を補正することができる。
なお、本実施形態では、同時に吐出動作を行う隣のノズルが増えるほど液滴の大きさが小さくなる場合について説明したが、液滴吐出ヘッド11の構造や駆動波形の形状によっては逆の傾向となることもある。
なお、本実施形態では、同時に吐出動作を行う隣のノズルが増えるほど液滴の大きさが小さくなる場合について説明したが、液滴吐出ヘッド11の構造や駆動波形の形状によっては逆の傾向となることもある。
<連続吐出時の吐出順番に関する吐出情報D3>
次に、連続吐出時の吐出順番に関する吐出情報D3の測定工程ST13について、図12を参照しつつ説明する。測定工程ST13では、1つのノズルから液滴を連続吐出する際に、2番目や3番目に吐出される液滴の吐出量の変化を測定する。
1つのノズルから高い周波数(例えば30kHz程度)で液滴を連続吐出する場合、吐出後のノズルメニスカスの振動が収まりきる前に次の液滴を吐出しようとする。そのため、ノズルメニスカスの振動の影響によって液滴の吐出量が変化する。
次に、連続吐出時の吐出順番に関する吐出情報D3の測定工程ST13について、図12を参照しつつ説明する。測定工程ST13では、1つのノズルから液滴を連続吐出する際に、2番目や3番目に吐出される液滴の吐出量の変化を測定する。
1つのノズルから高い周波数(例えば30kHz程度)で液滴を連続吐出する場合、吐出後のノズルメニスカスの振動が収まりきる前に次の液滴を吐出しようとする。そのため、ノズルメニスカスの振動の影響によって液滴の吐出量が変化する。
図12(a)は、ノズル20から液滴を1回のみ吐出する様子を示す模式図である。図12(b)は、ノズル20から2連続で液滴を吐出する様子を示す模式図である。図12(c)は、ノズル20から3連続で液滴を吐出する様子を示す模式図である。
各ノズルにおけるノズルメニスカスの振動数はほぼ一定であり、液滴吐出ヘッド11の液滴を吐出する最大周波数も固定されているため、連続吐出したときの液滴の吐出量の変化傾向は、各ノズルで一定の傾向となる。例えば、図12(a)に示す1回のみ吐出したときの液滴120aの大きさを100%としたとき、図12(b)に示す2番目の液滴120bの大きさは90%、図12(c)に示す3番目の液滴120cの大きさは95%、となる。
測定工程ST13では、インク受容容器303に液滴を連続吐出しながら、液滴を1回吐出するごとにインク受容容器303に収容されたインクの重量を測定する。液滴を1回吐出するごとの重量の差分を算出することで、1回ごとの液滴の重量を取得することができる。
吐出情報D3は、上記の手順により測定した各液滴の重量に基づいて、1番目の液滴に対する2番目の液滴、3番目の液滴の重量比率(吐出量比率)として取得することができる。さらに、必要に応じて、連続吐出の4番目や5番目の液滴についても同様に測定し、1番目の液滴に対する重量比率を吐出情報D3として取得することができる。
測定工程ST13で取得した吐出情報D3に基づけば、1つのノズルから液滴を連続吐出する場合の吐出順番に応じて変動する吐出量を補正することができる。
<駆動回路の個体差に関する吐出情報D4>
次に、駆動回路の個体差に関する吐出情報D4の測定工程ST14について、図5を参照しつつ説明する。測定工程ST14では、制御回路基板30に設けられた4つの駆動回路31A〜31D(D/Aコンバーター)の個体差に起因する液滴の吐出量の変化を測定する。
次に、駆動回路の個体差に関する吐出情報D4の測定工程ST14について、図5を参照しつつ説明する。測定工程ST14では、制御回路基板30に設けられた4つの駆動回路31A〜31D(D/Aコンバーター)の個体差に起因する液滴の吐出量の変化を測定する。
先に説明したように、ノズル20に対応して設けられた圧電素子16は、4つの駆動回路31A〜31Dのいずれかから入力される駆動信号COMに基づいて駆動される。4つの駆動回路31A〜31Dは、互いに等価な回路であるが、個体差が生じることは避けられない。そのため、波形データ選択回路32から同一の波形データが駆動回路31A〜31Dに供給されたとしても、駆動回路31A〜31Dから出力される駆動電圧Vhが同じ電圧値にならない場合がある。圧電素子16に入力される駆動電圧Vhがばらつくと、液滴の吐出量もばらつくことになる。
測定工程ST14では、例えば、駆動回路31A〜31Dに同一の波形データを入力した状態で、駆動回路31A〜31Dを1つずつ動作させて液滴の吐出動作を実行する。吐出した液滴はインク受容基板305に着弾させ、体積測定装置307を用いて各ノズルに対応する液滴の体積を測定する。
上記の測定により得られた液滴の体積を、同一ノズルについて駆動回路31A〜31D間で対比し、体積比率(吐出量比率)として算出する。例えば、1つのノズルについて、駆動回路31Aで駆動したときの吐出量を100%とした場合に、駆動回路31Bは99%、駆動回路31Cは101%、駆動回路31Dは99.5%といった体積比率が得られる。得られたノズルごとの体積比率が吐出情報D4である。
上記の測定により得られた液滴の体積を、同一ノズルについて駆動回路31A〜31D間で対比し、体積比率(吐出量比率)として算出する。例えば、1つのノズルについて、駆動回路31Aで駆動したときの吐出量を100%とした場合に、駆動回路31Bは99%、駆動回路31Cは101%、駆動回路31Dは99.5%といった体積比率が得られる。得られたノズルごとの体積比率が吐出情報D4である。
測定工程ST14で取得した吐出情報D4に基づけば、各ノズルに接続される駆動回路31A〜31Dが選択されたときに、駆動回路の個体差に起因して変動する吐出量を補正することができる。
<駆動回路の負荷状態に関する吐出情報D5>
次に、駆動回路の負荷状態に関する吐出情報D5の測定工程ST15について説明する。測定工程ST15では、制御回路基板30に設けられた4つの駆動回路31A〜31Dにおいて駆動する圧電素子16の数の差(負荷状態の差)に起因する液滴の吐出量の変化を測定する。
次に、駆動回路の負荷状態に関する吐出情報D5の測定工程ST15について説明する。測定工程ST15では、制御回路基板30に設けられた4つの駆動回路31A〜31Dにおいて駆動する圧電素子16の数の差(負荷状態の差)に起因する液滴の吐出量の変化を測定する。
先に説明したように、ノズル20に対応して設けられた圧電素子16は、4つの駆動回路31A〜31Dのいずれかから入力される駆動信号COMに基づいて駆動される。4つの駆動回路31A〜31Dは任意の圧電素子16に接続可能であり、ノズル数が4で割り切れない場合もあるため、駆動回路31A〜31Dに接続される圧電素子16の数は必ずしも同じにならない。例えば、下記に示すように、駆動回路31Aは18個のノズルを駆動し、他の駆動回路31B〜31Dは17個のノズルを駆動する場合がある。このように駆動するノズル数が駆動回路31A〜31Dで異なる場合、信号ラインCOM1〜COM4に流れる電流量に差が生じ(電気的クロストーク)、その結果として液滴の吐出量が変化する場合がある。
駆動回路31A 駆動ノズル数:18 吐出量の比:100.15%
駆動回路31B 駆動ノズル数:17 吐出量の比:99.95%
駆動回路31C 駆動ノズル数:17 吐出量の比:99.95%
駆動回路31D 駆動ノズル数:17 吐出量の比:99.95%
駆動回路31B 駆動ノズル数:17 吐出量の比:99.95%
駆動回路31C 駆動ノズル数:17 吐出量の比:99.95%
駆動回路31D 駆動ノズル数:17 吐出量の比:99.95%
測定工程ST15では、駆動回路31A〜31Dに種々の数のノズルを割り当てて液滴を吐出させる。吐出した液滴はインク受容容器303に収容させ、重量計量装置304を用いて各駆動回路31A〜31Dに対応するインクの重量を測定する。これにより、駆動回路31A〜31Dにおいて駆動するノズル数が変化したときの吐出量の変化を取得することができる。測定結果から、例えば、「駆動するノズルが1つ増えると吐出量が0.2%増加する」といった変化割合を得ることができる。得られた変化割合が吐出情報D5である。
測定工程ST15で取得した吐出情報D5に基づけば、駆動回路31A〜31Dの負荷状態(駆動するノズル数)が変化したときの電気的クロストークに起因して変動する吐出量を補正することができる。
<吐出量設定工程>
次に、吐出情報D1〜D5を利用した吐出量設定工程ST2について説明する。
吐出量設定工程ST2は、使用ノズル数に基づく補正を行う工程ST21と、隣り合うノズルの吐出状態に基づく補正を行う工程ST22と、連続吐出時の吐出順番に基づく補正を行う工程ST23と、工程ST21〜ST23で補正された駆動電圧に基づき圧電素子に接続する駆動回路を選択する工程ST24と、圧電素子に接続される駆動回路に基づく補正を行う工程ST25と、を含む。
次に、吐出情報D1〜D5を利用した吐出量設定工程ST2について説明する。
吐出量設定工程ST2は、使用ノズル数に基づく補正を行う工程ST21と、隣り合うノズルの吐出状態に基づく補正を行う工程ST22と、連続吐出時の吐出順番に基づく補正を行う工程ST23と、工程ST21〜ST23で補正された駆動電圧に基づき圧電素子に接続する駆動回路を選択する工程ST24と、圧電素子に接続される駆動回路に基づく補正を行う工程ST25と、を含む。
まず、工程ST21では、使用ノズル数に関する吐出情報D1を用いた吐出量の補正が行われる。具体的には、走査ごとに規定される液滴吐出ヘッド11(ノズル群21A)の吐出パターンにおいて、吐出ノズルの割合が例えば全体の2/5である場合には、図10に示した使用ノズル数(1/2Duty、1/3Duty)ごとの2つの吐出量のグラフを内挿して、対応するノズルの平均的な吐出量を取得する。さらに、得られた吐出量を基準吐出量q0に補正するための駆動電圧Vh1が算出される。
次に、工程ST22では、隣り合うノズルの吐出状態に関する吐出情報D2を用いた吐出量の補正が行われる。具体的には、走査ごとに規定される液滴吐出ヘッド11(ノズル群21A)の吐出パターンにおいて、各ノズルの吐出状態を、「単独吐出」、「片側同時吐出」、「両側同時吐出」のいずれかに分類する。「単独吐出」に分類されたノズルについては吐出量の補正は行わない。「片側同時吐出」又は「両側同時吐出」に分類されたノズルについては、吐出情報D2に基づいて、「単独吐出」と同等の吐出量となるように、工程ST21で設定された駆動電圧Vh1がさらに駆動電圧Vh2に補正される。
次に、工程ST23では、連続吐出時の吐出順番に関する吐出情報D3を用いた吐出量の補正が行われる。具体的には、走査ごとに規定される液滴吐出ヘッド11(ノズル群21A)の吐出パターンを、前後の走査に対応する吐出パターンと比較し、各ノズルごとに連続吐出の有無を分類する。例えば、各吐出パターンにおいて、各ノズルに「連続吐出番号」を振る。「連続吐出番号」が「1」であれば、連続吐出時の先頭の液滴である。同様に「連続吐出番号」が「2」であれば連続吐出の2番目の液滴、「連続吐出番号」が「3」であれば連続吐出の3番目の液滴である。
「連続吐出番号」が「1」であるノズルについては吐出量の補正は行わない。「連続吐出番号」が「2」又は「3」である場合には、吐出情報D3に基づいて、「連続吐出番号」が「1」である液滴と同等の吐出量となるように、工程ST22で設定された駆動電圧Vh2がさらに駆動電圧Vh3に補正される。
次に、工程ST24では、工程ST21〜ST23で順次補正された結果である駆動電圧Vh3に基づいて、各ノズルごとに接続される駆動回路31A〜31Dが選択される。本実施形態では、4つの駆動回路31A〜31Dが設けられているから、ノズルごとの駆動電圧Vh3を電圧値ごとに4水準に分類し、各水準に対応する波形データを選択する。そして、選択した4つの波形データを駆動回路31A〜31Dに供給する駆動波形として決定する。これにより、吐出に使用されるノズルについて、駆動回路31A〜31Dが割り当てられる。
次に、工程ST25では、接続する駆動回路に関する吐出情報D4及び吐出情報D5を用いた吐出量の補正が行われる。具体的には、吐出情報D4に基づいて、駆動回路31A〜31Dの個体差に起因する駆動電圧の変化が補正される。駆動電圧の変化の補正は、各駆動回路31A〜31Dに供給する波形データの再選択によって行う。
また、吐出情報D5に基づいて、駆動回路31A〜31Dの駆動ノズル数の差に起因する吐出量の補正が成される。例えば、1ノズル当たり吐出量0.2%の差であれば、ノズル数の差に0.2%を乗じた値が補正すべき吐出量であり、この吐出量を補正する駆動電圧となるように駆動回路31A〜31Dに供給する波形データを再選択する。
以上の工程ST21〜ST25により、ノズルごとの吐出量の設定が完了する。
以上のように、本実施形態によれば、ノズルごとの吐出量のばらつきの原因となる使用ノズル数、隣り合うノズルの吐出状態、連続吐出時の吐出順番、駆動回路の個体差、及び駆動回路の負荷状態の5つの要素について、それぞれ適切な補正を行うことができる。これにより、極めて高精度に液滴の吐出量のばらつきを抑えることができる。
なお、本実施形態では、使用ノズル数、隣り合うノズルの吐出状態、連続吐出時の吐出順番、駆動回路の個体差、及び駆動回路の負荷状態の5つの要素のすべてについて吐出量の補正を行うこととしたが、各要素は独立しており、1つ又は複数の組み合わせにより実施することができる。
また本実施形態の液滴吐出方法は、液滴吐出装置の制御プログラムとして提供することもできる。このプログラムは、上述の液滴吐出方法を実行する。すなわち、図7に示すコンピューター308を介して、液滴吐出装置200に液滴吐出方法を実行させる。
上記プログラムは、例えばコンピューターのメモリーに記憶(格納)されていてもよく、外部の記録装置や記録媒体に記録したものでもよい。このプログラムを用いることで、画素領域へのノズル割り当てに制限がある場合でも安定して画素領域内にインクを塗布することができる。
上記プログラムは、例えばコンピューターのメモリーに記憶(格納)されていてもよく、外部の記録装置や記録媒体に記録したものでもよい。このプログラムを用いることで、画素領域へのノズル割り当てに制限がある場合でも安定して画素領域内にインクを塗布することができる。
(液滴吐出方法の実施例)
次に、上述した液滴吐出方法の実施例について、図13を参照して説明する。
図13には、15個のノズルを備えた液滴吐出ヘッド11から、異なる吐出パターンで3ショットの液滴吐出動作を行う様子が示されている。
図13に示す液滴吐出動作に、上記実施形態の吐出量設定動作を適用する場合、以下の手順で各補正動作が実行される。各補正動作を実行することにより、各ノズルの吐出量の変動を抑え、正確な量で基板にインクを塗布することができる。
次に、上述した液滴吐出方法の実施例について、図13を参照して説明する。
図13には、15個のノズルを備えた液滴吐出ヘッド11から、異なる吐出パターンで3ショットの液滴吐出動作を行う様子が示されている。
図13に示す液滴吐出動作に、上記実施形態の吐出量設定動作を適用する場合、以下の手順で各補正動作が実行される。各補正動作を実行することにより、各ノズルの吐出量の変動を抑え、正確な量で基板にインクを塗布することができる。
<1ショット目>
使用ノズル数:9ノズル(15ノズル中)
片側同時吐出ノズル:No.2,3,7,9,13,14
両側同時吐出ノズル:No.8
使用ノズル数:9ノズル(15ノズル中)
片側同時吐出ノズル:No.2,3,7,9,13,14
両側同時吐出ノズル:No.8
(1)工程ST21:使用ノズル数は9/15Dutyであるから、1/2Duty,1Shotの吐出量分布と、1/3Duty,1Shotの吐出量分布を外挿して吐出量分布を取得する。これにより、ノズル位置ごとの吐出量のばらつきを補正する。また、9/15Dutyは1/2Dutyよりも多いので、1/2Dutyの平均吐出量と1/3Dutyの平均吐出量との関係を外挿して9/15Dutyの吐出量を補正する。
(2)工程ST22:片側同時吐出ノズル、両側同時吐出ノズルについて、吐出情報D2に基づいてそれぞれの吐出量を補正する。
(3)工程ST23:1ショット目であるから連続吐出の影響はない。したがって補正は行わない。
(4)工程ST25:ノズルごとに接続される駆動回路の個体差(吐出情報D4)、負荷状態(吐出情報D5)に基づいてそれぞれの吐出量を補正する。
(2)工程ST22:片側同時吐出ノズル、両側同時吐出ノズルについて、吐出情報D2に基づいてそれぞれの吐出量を補正する。
(3)工程ST23:1ショット目であるから連続吐出の影響はない。したがって補正は行わない。
(4)工程ST25:ノズルごとに接続される駆動回路の個体差(吐出情報D4)、負荷状態(吐出情報D5)に基づいてそれぞれの吐出量を補正する。
<2ショット目>
使用ノズル数:6ノズル(15ノズル中)
片側同時吐出ノズル:No.2,3,7,8
両側同時吐出ノズル:なし
使用ノズル数:6ノズル(15ノズル中)
片側同時吐出ノズル:No.2,3,7,8
両側同時吐出ノズル:なし
(1)工程ST21:使用ノズル数は6/15Dutyであるから、1/2Duty,1Shotの吐出量分布と、1/3Duty,1Shotの吐出量分布を内挿して吐出量分布を取得する。これにより、ノズル位置ごとの吐出量のばらつきを補正する。また、1/2Dutyの平均吐出量と1/3Dutyの平均吐出量との関係を内挿して6/15Dutyの吐出量を補正する。
(2)工程ST22:片側同時吐出ノズル、両側同時吐出ノズルについて、吐出情報D2に基づいてそれぞれの吐出量を補正する。
(3)工程ST23:2ショット目であるから、ノズルNo.2,3,7,8,11,14について連続吐出の影響がある。これらのノズルについて吐出情報D3に基づく補正を行う。
(4)工程ST25:ノズルごとに接続される駆動回路の個体差(吐出情報D4)、負荷状態(吐出情報D5)に基づいてそれぞれの吐出量を補正する。
(2)工程ST22:片側同時吐出ノズル、両側同時吐出ノズルについて、吐出情報D2に基づいてそれぞれの吐出量を補正する。
(3)工程ST23:2ショット目であるから、ノズルNo.2,3,7,8,11,14について連続吐出の影響がある。これらのノズルについて吐出情報D3に基づく補正を行う。
(4)工程ST25:ノズルごとに接続される駆動回路の個体差(吐出情報D4)、負荷状態(吐出情報D5)に基づいてそれぞれの吐出量を補正する。
<3ショット目>
使用ノズル数:2ノズル(15ノズル中)
片側同時吐出ノズル:なし
両側同時吐出ノズル:なし
使用ノズル数:2ノズル(15ノズル中)
片側同時吐出ノズル:なし
両側同時吐出ノズル:なし
(1)工程ST21:使用ノズル数は2/15Dutyであるから、1/2Duty,1Shotの吐出量分布と、1/3Duty,1Shotの吐出量分布を外挿して吐出量分布を取得する。これにより、ノズル位置ごとの吐出量のばらつきを補正する。また、2/15Dutyは1/3Dutyよりも少ないので、1/2Dutyの平均吐出量と1/3Dutyの平均吐出量との関係を外挿して2/15Dutyの吐出量を補正する。
(2)工程ST22:片側同時吐出ノズル、両側同時吐出ノズルはないから、吐出量の補正は行わない。
(3)工程ST23:3ショット目であるから、ノズルNo.2,8について連続吐出の影響がある。これらのノズルについて吐出情報D3に基づく補正を行う。
(4)工程ST25:ノズルごとに接続される駆動回路の個体差(吐出情報D4)、負荷状態(吐出情報D5)に基づいてそれぞれの吐出量を補正する。
(2)工程ST22:片側同時吐出ノズル、両側同時吐出ノズルはないから、吐出量の補正は行わない。
(3)工程ST23:3ショット目であるから、ノズルNo.2,8について連続吐出の影響がある。これらのノズルについて吐出情報D3に基づく補正を行う。
(4)工程ST25:ノズルごとに接続される駆動回路の個体差(吐出情報D4)、負荷状態(吐出情報D5)に基づいてそれぞれの吐出量を補正する。
1…基板、2…液滴着弾領域、11,12…液滴吐出ヘッド、18…駆動信号選択回路、20,20a,20b,20c,20d…ノズル、31A,31B,31C,31D…駆動回路、120A,120B,120C…液滴、200…液滴吐出装置、205…ステージ、308…コンピューター、Vh,Vh1,Vh2,Vh3…駆動電圧、COM…駆動信号、D1,D2,D3,D4,D5…吐出情報、S1,S2,S3,S4,S5,ST21,ST22,ST23,ST24,ST25…工程
Claims (13)
- 複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体とを相対的に移動させながら、前記複数のノズルの各々から前記液滴着弾領域内に複数の液滴を吐出する液滴吐出方法であって、
前記複数のノズルのうち少なくとも一つのノズルから前記複数の液滴を吐出する際に、前記複数の液滴の各々の吐出順番に関する吐出量情報に基づいて、前記複数の液滴の各々の吐出量を補正する、
液滴吐出方法。 - 前記複数の液滴の吐出順番に関する吐出量情報は、
前記液滴吐出ヘッドから媒体に対して液滴を連続吐出し、吐出ごとに前記媒体上の液滴の合計重量を測定する工程と、
吐出ごとの前記合計重量の差分から、吐出順番ごとの液滴の吐出量を算出する工程と、
前記吐出順番ごとの前記液滴の吐出量を比較し、前記吐出順番に対する吐出量の関数を導出する工程と、
を含む工程により規定される吐出量の関数である、
請求項1に記載の液滴吐出方法。 - 複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体とを相対的に移動させながら、前記複数のノズルの各々から前記液滴着弾領域内に液滴を吐出する液滴吐出方法であって、
前記複数のノズルの各々から前記液滴を吐出する際に、前記複数のノズルのうち隣り合う前記ノズルの吐出状態に関する吐出量情報に基づいて前記液滴の吐出量を補正する、
液滴吐出方法。 - 前記複数のノズルは、第1のノズルと、前記第1のノズルの両隣のノズルである第2のノズル、及び第3のノズルを含み、
前記隣り合うノズルの吐出状態に関する吐出量情報は、
第2のノズル及び第3のノズルから液滴を吐出させない状態で前記第1のノズルから液滴を吐出して単独吐出時の吐出量を測定する工程と、
第1のノズルと前記第2のノズルから同時に液滴を吐出して前記第1のノズルの吐出量を測定し、測定した前記第1のノズルの吐出量と前記単独吐出時の吐出量とを比較することで、単独吐出時の吐出量に対する片側同時吐出時の吐出量の関数を取得する工程と、
前記第1から第3のノズルから同時に液滴を吐出して前記第1のノズルの吐出量を測定し、測定した前記第1のノズルの吐出量と前記単独吐出時の吐出量とを比較することで、単独吐出時の吐出量に対する両側同時吐出時の吐出量の関数を取得する工程と、
を含む工程により規定される吐出量の関数である、
請求項3に記載の液滴吐出方法。 - 前記複数のノズルの各々から前記液滴を吐出する際に、前記複数のノズルのうち同時に液滴を吐出する前記ノズルの数に関する吐出量情報に基づいて前記液滴の吐出量を補正する、
請求項1から4のいずれか1項に記載の液滴吐出方法。 - 前記液滴吐出ヘッドは、前記複数のノズルの各々に設けられた駆動素子と、前記駆動素子に駆動電圧を供給する複数の駆動回路と、前記駆動素子と前記駆動回路とを選択接続する選択回路と、を有しており、
前記複数のノズルの各々から前記液滴を吐出する際に、前記駆動素子に接続される前記駆動回路に関する吐出情報に基づいて前記液滴の吐出量を補正する、
請求項1から5のいずれか1項に記載の液滴吐出方法。 - 前記液滴吐出ヘッドは、前記複数のノズルの各々に設けられた駆動素子と、前記駆動素子に駆動電圧を供給する複数の駆動回路と、前記駆動素子と前記駆動回路とを選択接続する選択回路と、を有しており、
前記複数のノズルの各々から前記液滴を吐出する際に、前記駆動回路ごとの前記駆動素子の接続数に関する吐出情報に基づいて前記液滴の吐出量を補正する、
請求項1から6のいずれか1項に記載の液滴吐出方法。 - 複数のノズルを有する液滴吐出ヘッドと、
液滴着弾領域が形成された基体を支持するステージと、
前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、
前記複数のノズルのうち少なくとも一つのノズルから複数の液滴を吐出する際に、前記複数の液滴の各々の吐出順番に関する吐出量情報に基づいて、前記複数の液滴の各々の吐出量を補正する制御装置と、
を有する、液滴吐出装置。 - 複数のノズルを有する液滴吐出ヘッドと、
液滴着弾領域を有する基体を支持するステージと、
前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、
前記複数のノズルの各々から吐出する液滴の吐出量を、前記複数のノズルのうち隣り合う前記ノズルの吐出状態に関する吐出量情報に基づいて補正する制御装置と、
を有する、液滴吐出装置。 - 複数のノズルを有する液滴吐出ヘッドと、
液滴着弾領域を有する基体を支持するステージと、
前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、
前記複数のノズルの各々から吐出する液滴の吐出量を、前記複数の液滴の各々のうち同時に液滴を吐出する前記ノズルの数に関する吐出量情報に基づいて前記液滴の吐出量を補正する制御装置と、
を有する、液滴吐出装置。 - 複数のノズルを有する液滴吐出ヘッドと、
液滴着弾領域を有する基体を支持するステージと、
前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、
を備え、
前記液滴吐出ヘッドは、前記ノズルの各々に設けられた駆動素子と、前記駆動素子に駆動電圧を供給する複数の駆動回路と、前記駆動素子と前記駆動回路とを選択接続する選択回路と、を有し、
前記ノズルから前記液滴を吐出する際に、前記駆動素子に接続される前記駆動回路に関する吐出情報に基づいて前記液滴の吐出量を補正する制御装置を有する、
液滴吐出装置。 - 複数のノズルを有する液滴吐出ヘッドと、
液滴着弾領域を有する基体を支持するステージと、
前記液滴吐出ヘッドと前記ステージとを相対移動する駆動装置と、
を備え、
前記液滴吐出ヘッドは、前記ノズルの各々に設けられた駆動素子と、前記駆動素子に駆動信号を供給する複数の駆動回路と、前記駆動素子と前記駆動回路とを選択接続する駆動信号選択回路と、を有し、
前記ノズルから前記液滴を吐出する際に、前記駆動回路ごとの前記駆動素子の接続数に関する吐出情報に基づいて前記液滴の吐出量を補正する制御装置を有する、
液滴吐出装置。 - 複数のノズルを有する液滴吐出ヘッドと、液滴着弾領域を有する基体とを相対的に移動させながら、前記複数のノズルから前記液滴着弾領域内に複数の液滴を吐出する動作をコンピューターに実行させるプログラムであって、
請求項1から7のいずれか1項に記載の吐出量の補正動作を実行するステップを有する、プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015081650A JP2016198738A (ja) | 2015-04-13 | 2015-04-13 | 液滴吐出方法、液滴吐出装置、プログラム |
| PCT/JP2016/001979 WO2016166965A1 (ja) | 2015-04-13 | 2016-04-12 | 液滴吐出方法、液滴吐出装置、プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015081650A JP2016198738A (ja) | 2015-04-13 | 2015-04-13 | 液滴吐出方法、液滴吐出装置、プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016198738A true JP2016198738A (ja) | 2016-12-01 |
Family
ID=57127038
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015081650A Pending JP2016198738A (ja) | 2015-04-13 | 2015-04-13 | 液滴吐出方法、液滴吐出装置、プログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2016198738A (ja) |
| WO (1) | WO2016166965A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020045469A1 (ja) * | 2018-08-31 | 2020-03-05 | 日本電産株式会社 | 塗布装置 |
| US11498329B2 (en) | 2019-11-29 | 2022-11-15 | Ricoh Company, Ltd. | Liquid discharge apparatus, head drive control method, and head drive control device |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000089019A (ja) * | 1998-09-10 | 2000-03-31 | Canon Inc | カラーフィルタとその製造方法、該カラーフィルタを用いた液晶素子 |
| JP4098328B2 (ja) * | 2005-11-30 | 2008-06-11 | シャープ株式会社 | インク吐出装置及びインク吐出方法 |
| JP2009195868A (ja) * | 2008-02-25 | 2009-09-03 | Seiko Epson Corp | 吐出ヘッドの検査方法、吐出ヘッド検査装置及び描画方法 |
| JP2011011146A (ja) * | 2009-07-02 | 2011-01-20 | Seiko Epson Corp | 液滴吐出方法及びカラーフィルター製造方法 |
| JP2011101870A (ja) * | 2009-11-12 | 2011-05-26 | Seiko Epson Corp | 液滴吐出ヘッドの吐出量取得方法、適正電圧決定方法および液滴吐出装置 |
| JP5740787B2 (ja) * | 2011-03-29 | 2015-07-01 | 凸版印刷株式会社 | インクジェットパターン形成装置 |
-
2015
- 2015-04-13 JP JP2015081650A patent/JP2016198738A/ja active Pending
-
2016
- 2016-04-12 WO PCT/JP2016/001979 patent/WO2016166965A1/ja not_active Ceased
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020045469A1 (ja) * | 2018-08-31 | 2020-03-05 | 日本電産株式会社 | 塗布装置 |
| JPWO2020045469A1 (ja) * | 2018-08-31 | 2021-08-26 | 日本電産株式会社 | 塗布装置 |
| JP7166018B2 (ja) | 2018-08-31 | 2022-11-07 | 兵神装備株式会社 | 塗布装置 |
| US11498329B2 (en) | 2019-11-29 | 2022-11-15 | Ricoh Company, Ltd. | Liquid discharge apparatus, head drive control method, and head drive control device |
| US12172436B2 (en) | 2019-11-29 | 2024-12-24 | Ricoh Company, Ltd. | Liquid discharge apparatus, head drive control method, and head drive control device |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016166965A1 (ja) | 2016-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4888346B2 (ja) | 液状体の塗布方法、有機el素子の製造方法 | |
| US8123324B2 (en) | Method for setting up drive signal | |
| JP5115281B2 (ja) | 液滴吐出装置、液状体の吐出方法、カラーフィルタの製造方法、有機el装置の製造方法 | |
| US8066345B2 (en) | Method for setting up drive signal | |
| JP3770252B2 (ja) | 液体吐出装置及び液体吐出方法 | |
| JP5211649B2 (ja) | 吐出ヘッドの駆動方法、液状体の吐出方法、有機el素子の製造方法 | |
| JP2017056402A (ja) | 液滴吐出方法、液滴吐出プログラム、液滴吐出装置 | |
| JP2015033657A (ja) | インクジェット印刷方法 | |
| WO2016166965A1 (ja) | 液滴吐出方法、液滴吐出装置、プログラム | |
| JP2006061795A (ja) | 液滴吐出方法および液滴吐出装置 | |
| JP2008276088A (ja) | 駆動信号設定方法 | |
| JP2008197513A (ja) | 駆動信号設定方法 | |
| JP2008194644A (ja) | 駆動信号設定方法 | |
| JP2005001346A (ja) | 液体吐出装置及び液体吐出方法 | |
| CN120603714A (zh) | 用于修整微滴喷射信号的方法、装置和电路 | |
| JP2008197514A (ja) | 駆動信号設定方法 | |
| JP2009183857A (ja) | 液滴吐出装置及び薄膜形成方法 | |
| JP2009183859A (ja) | 液滴吐出装置及び薄膜形成方法 | |
| JP2008276086A (ja) | 駆動信号設定方法 | |
| JP2009202044A (ja) | 吐出特性取得装置、液状体吐出装置、および吐出特性取得方法 | |
| JP2007054759A (ja) | 液滴吐出方法および液滴吐出装置 | |
| JP2016190379A (ja) | 液状体吐出装置の駆動設定方法及び駆動設定プログラム | |
| JP5387590B2 (ja) | 駆動信号設定方法 | |
| JP2012238479A (ja) | インクジェット装置 | |
| JP2008276087A (ja) | 駆動信号設定方法 |