JP2016201924A - モータの回転位置推定方法およびモータの制御装置 - Google Patents
モータの回転位置推定方法およびモータの制御装置 Download PDFInfo
- Publication number
- JP2016201924A JP2016201924A JP2015081011A JP2015081011A JP2016201924A JP 2016201924 A JP2016201924 A JP 2016201924A JP 2015081011 A JP2015081011 A JP 2015081011A JP 2015081011 A JP2015081011 A JP 2015081011A JP 2016201924 A JP2016201924 A JP 2016201924A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- current
- motor
- filter
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 29
- 238000000605 extraction Methods 0.000 claims abstract description 52
- 238000005259 measurement Methods 0.000 claims abstract description 14
- 230000008569 process Effects 0.000 claims description 7
- 239000000284 extract Substances 0.000 claims description 3
- 238000001914 filtration Methods 0.000 abstract description 5
- 238000004364 calculation method Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 12
- 238000006243 chemical reaction Methods 0.000 description 10
- 230000001360 synchronised effect Effects 0.000 description 7
- 239000013598 vector Substances 0.000 description 7
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 6
- 239000002131 composite material Substances 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 4
- 238000002347 injection Methods 0.000 description 3
- 239000007924 injection Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000005355 Hall effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/183—Circuit arrangements for detecting position without separate position detecting elements using an injected high frequency signal
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
【課題】回転部の回転位置を精度よく取得する。
【解決手段】モータ1の回転位置推定方法は、a)突極性を有するモータの駆動電圧に、駆動電圧の周波数よりも高い周波数の測定用電圧を重畳した三相の電圧を、モータの静止部11に供給する工程と、b)a)工程と並行して、静止部に流れる三相電流ia,ib,ic所定の周波数の成分を、第1抽出電流、第2抽出電流および第3抽出電流として抽出する工程と、c)第1抽出電流と第2抽出電流とを乗算した第1合成信号、第2抽出電流と第3抽出電流とを乗算した第2合成信号、および、第3抽出電流と第1抽出電流とを乗算した第3合成信号を取得する工程と、d)駆動電圧の周波数を含む低周波成分を通すローパスフィルタ処理により、第1ないし第3合成信号から、第1ないし第3フィルタ信号をそれぞれ取得する工程と、e)第1ないし第3フィルタ信号に基づいて、回転部12の回転位置を取得する工程とを備える。
【選択図】図1
【解決手段】モータ1の回転位置推定方法は、a)突極性を有するモータの駆動電圧に、駆動電圧の周波数よりも高い周波数の測定用電圧を重畳した三相の電圧を、モータの静止部11に供給する工程と、b)a)工程と並行して、静止部に流れる三相電流ia,ib,ic所定の周波数の成分を、第1抽出電流、第2抽出電流および第3抽出電流として抽出する工程と、c)第1抽出電流と第2抽出電流とを乗算した第1合成信号、第2抽出電流と第3抽出電流とを乗算した第2合成信号、および、第3抽出電流と第1抽出電流とを乗算した第3合成信号を取得する工程と、d)駆動電圧の周波数を含む低周波成分を通すローパスフィルタ処理により、第1ないし第3合成信号から、第1ないし第3フィルタ信号をそれぞれ取得する工程と、e)第1ないし第3フィルタ信号に基づいて、回転部12の回転位置を取得する工程とを備える。
【選択図】図1
Description
本発明は、モータの回転位置推定方法およびモータの制御装置に関する。
従来より、モータのワイヤ数およびサイズ、並びに、モータの製造コストを低減するために、回転位置検出用のセンサを省略したセンサレスベクトル制御が行われている。センサレスベクトル制御技術の一つとして、高周波電圧印加法が知られている。高周波電圧印加法では、モータの駆動電圧の周波数よりも高い周波数の電圧をモータに付与し、その応答電流からモータの回転位置(位相)が推定される。
例えば、Shinnaka, S.による"A new speed-varying ellipse voltage injection method for sensorless drive of permanent-magnet synchronous motors with pole saliency - New PLL method using high-frequency current component multiplied signal"(Ieee Transactions on Industry Applications, 2008, 44(3), p.777-788)の手法では、γδ回転座標系において高周波電圧が生成される。当該電圧はパーク変換によりαβ静止座標系に変換され、空間ベクトルPWMおよびインバータを用いてモータに付与される。モータに流れる三相高周波電流が、バンドパスフィルタを用いて抽出され、γδ回転座標系に変換される。γ軸の電流とδ軸の電流とが乗算され、得られた信号に対するローパスフィルタ処理により、単一チャンネルの信号が生成される。当該信号を用いてPLLによりモータの回転位置が推定される。
また、Corley, M. J.およびLorenz, R. D.による "Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds"(Ieee Transactions on Industry Applications, 1998, 34(4), p.784-789)の手法では、静止座標系における応答電流と、推定された回転位置(角度)のサインおよびコサインを用いて、高周波電流のd軸成分の信号が求められる。当該信号をバンドパスフィルタ等に通すことにより、推定された回転位置と実際の回転位置との間の誤差信号が得られる。当該誤差信号は、オブザーバに入力される。オブザーバは、誤差を最小にすることにより、回転位置をトラッキングする。
Shinnaka, S., "A new speed-varying ellipse voltage injection method for sensorless drive of permanent-magnet synchronous motors with pole saliency - New PLL method using high-frequency current component multiplied signal", Ieee Transactions on Industry Applications, 2008, 44(3), p.777-788 Corley, M. J. and Lorenz, R. D., "Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds", Ieee Transactions on Industry Applications, 1998, 34(4), p.784-789
Shinnaka, S., "A new speed-varying ellipse voltage injection method for sensorless drive of permanent-magnet synchronous motors with pole saliency - New PLL method using high-frequency current component multiplied signal", Ieee Transactions on Industry Applications, 2008, 44(3), p.777-788 Corley, M. J. and Lorenz, R. D., "Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds", Ieee Transactions on Industry Applications, 1998, 34(4), p.784-789
ところで、上記手法では、静止座標系と回転座標系との間の変換等、演算部において高い演算負荷を伴う処理が必要となる。演算部における演算負荷の増加は、回転部の回転位置の取得の精度に影響が出る虞がある。したがって、低い演算負荷にて回転部の回転位置を精度よく取得する新規な手法が求められている。
本発明は上記課題に鑑みなされたものであり、低い演算負荷にて回転部の回転位置を精度よく取得する新規な手法を提供することを目的としている。
本発明の例示的なモータの回転位置推定方法は、a)突極性を有するモータの回転部を回転するための駆動電圧に、前記駆動電圧の周波数よりも高い所定の周波数の測定用電圧を重畳した三相の電圧を、前記モータの静止部に供給する工程と、b)前記a)工程と並行して、前記静止部に流れる三相電流における前記所定の周波数の成分を、第1抽出電流、第2抽出電流および第3抽出電流として抽出する工程と、c)前記第1抽出電流と前記第2抽出電流とを乗算した第1合成信号、前記第2抽出電流と前記第3抽出電流とを乗算した第2合成信号、および、前記第3抽出電流と前記第1抽出電流とを乗算した第3合成信号を取得する工程と、d)前記駆動電圧の周波数を含む低周波成分を通すローパスフィルタ処理により、前記第1合成信号、前記第2合成信号および前記第3合成信号から、第1フィルタ信号、第2フィルタ信号および第3フィルタ信号をそれぞれ取得する工程と、e)前記第1フィルタ信号、前記第2フィルタ信号および前記第3フィルタ信号に基づいて、前記回転部の回転位置を取得する工程と、を備える。
本発明の例示的なモータの制御装置は、突極性を有するモータの回転部を回転するための駆動電圧に、前記駆動電圧の周波数よりも高い所定の周波数の測定用電圧を重畳した三相の電圧を、前記モータの静止部に供給する電圧供給部と、前記静止部に流れる三相電流における前記所定の周波数の成分を、第1抽出電流、第2抽出電流および第3抽出電流として抽出する電流抽出部と、前記第1抽出電流と前記第2抽出電流とを乗算した第1合成信号、前記第2抽出電流と前記第3抽出電流とを乗算した第2合成信号、および、前記第3抽出電流と前記第1抽出電流とを乗算した第3合成信号を取得する合成信号取得部と、前記駆動電圧の周波数を含む低周波成分を通すローパスフィルタ処理により、前記第1合成信号、前記第2合成信号および前記第3合成信号から、第1フィルタ信号、第2フィルタ信号および第3フィルタ信号をそれぞれ取得するローパスフィルタ処理部と、前記第1フィルタ信号、前記第2フィルタ信号および前記第3フィルタ信号に基づいて、前記回転部の回転位置を取得する回転位置取得部と、を備え、前記電圧供給部が、前記回転部の回転位置に基づいて前記駆動電圧の位相を制御する。
本発明によれば、低い演算負荷にて回転部の回転位置を精度よく取得することができる。
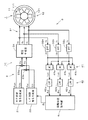
図1は、本発明の例示的な第1の実施形態に係るモータ1の制御装置10の構成を示す図である。制御装置10の各構成要素は、例えばモータ1の回路基板上に設けられる。なお、制御装置10は、回路基板(例えば、インバータ等)とは、別体に設けられてもよい。モータ1は、例えば永久磁石同期モータであり、突極性を有する。モータ1は、静止部11と、回転部(回転子)12と、を含む。静止部11はステータ(固定子)111を含む。回転部12は永久磁石121を含む。静止部11は、回転部12を回転可能に支持する。
制御装置10は、電圧供給部2と、電流抽出部3と、合成信号取得部41と、ローパスフィルタ処理部42と、回転位置取得部5と、を含む。制御装置10の一部は、ソフトウェアを含む演算部等により実現されてよい。したがって、これらの構成要素は物理的に区別可能に設けられる必要はない。すなわち、制御装置10の一部は、ソフトウェアにより実現されてもよく、ハードウェアによって実現されても良い。
電圧供給部2は、HF印加信号生成部21と、LF制御信号生成部22と、2個の加算器23a,23bと、電圧生成部24と、を含む。HF印加信号生成部21は、αβ座標系のα軸方向に変化する高周波印加信号、および、β軸方向に変化する高周波印加信号(high-frequency injection signal)を生成する。以下、高周波印加信号を「HF印加信号」という。HF印加信号は、例えば正弦波信号である。図1では、α軸のHF印加信号をVαhとして示し、β軸のHF印加信号をVβhとして示す。HF印加信号Vαh,Vβhは、他の波形の信号であってよい。ここで、3相の固定子巻線に流れる電流をベクトルで表した座標系をABC座標系とすると、αβ座標系とは、ABC座標系を2相に変換(クラーク変換)した固定座標系である。α軸およびβ軸は、互いに直交する。
LF制御信号生成部22は、αβ座標系のα軸およびβ軸における低周波制御信号を生成する。以下、低周波制御信号を「LF制御信号」という。LF制御信号は、ユーザにより設定される各種設定値、および、回転位置取得部5により取得される回転部12の回転位置等の入力を用いて生成される。LF制御信号は、回転部12の回転を制御する信号である。LF制御信号の生成は、ベクトル制御(Field Oriented Control:FOC)、直接トルク制御(Direct Torque Control:DTC)、PID制御、または、6ステップ制御等のアルゴリズムに基づく。図1では、α軸のLF制御信号をVαlとして示し、β軸のLF制御信号をVβlとして示す。加算器23aは、α軸のLF制御信号Vαlにα軸のHF印加信号Vαhを重畳して、α軸の重畳信号Vαを出力する。加算器23bは、β軸のLF制御信号Vβlにβ軸のHF印加信号Vβhを重畳して、β軸の重畳信号Vβを出力する。
電圧生成部24は、例えば、二相/三相変換(αβ−ABC変換)可能な線形電力増幅器、または、空間ベクトルPWM(Pulse Width Modulation)インバータ等を含む。二相/三相変換は、α軸およびβ軸の信号を、静止部11に供給する三相電圧にそれぞれ対応するA軸、B軸およびC軸の信号に変換する。すなわち、二相/三相変換は、αβ座標系の信号をABC座標系の信号に変換する。電圧生成部24は、A軸、B軸およびC軸にそれぞれ対応する三相電圧Va,Vb,Vcを静止部11に供給する。HF印加信号生成部21、LF制御信号生成部22、および、加算器23a,23bは、モータ1に供給する電圧指令を生成する電圧指令生成部と捉えることが可能である。電圧生成部24は、電圧指令生成部からの電圧指令に基づいてモータ1に電圧を供給する。
電流抽出部3は、電流信号取得ユニット31と、3個の抽出器32a,32b,32cと、を含む。電流信号取得ユニット31は、いわゆる電流センサであり、例えば、増幅回路を有する分流器、シャント抵抗器、または、ホール効果電流変換器等を含む。電流信号取得ユニット31は、静止部11に流れる三相電流ia,ib,icを取得する。抽出器32a〜32cは、例えばバンドパスフィルタ(BPF)を含む。抽出器32a〜32cは、三相電流ia,ib,icの高周波(HF)成分を、A軸、B軸およびC軸の抽出電流iah,ibh,ichとしてそれぞれ抽出する。
合成信号取得部41は、3個の乗算器41a,41b,41cを含む。乗算器41a〜41cは、第1ないし第3合成信号をそれぞれ生成する。合成信号は、後述の回転位置の取得に用いられる。合成信号の詳細は後述する。図1では、第1ないし第3合成信号をiabh,ibch,icahとして示す。ローパスフィルタ処理部42は、3個のローパスフィルタ(LPF)42a,42b,42cを含む。ローパスフィルタ42a〜42cは、第1ないし第3合成信号iabh,ibch,icahから、第1ないし第3フィルタ信号をそれぞれ取得する。図1では、第1ないし第3フィルタ信号をAab,Abc,Acaとして示す。抽出器32a〜32c、乗算器41a〜41c、および、ローパスフィルタ42a〜42cは、三相電流ia,ib,icを処理することにより、第1ないし第3フィルタ信号Aab,Abc,Acaを生成する信号処理ユニットと捉えることができる。フィルタ信号Aab,Abc,Acaは、後述の回転位置の取得に用いられる位置感知信号である。
回転位置取得部5は、第1ないし第3フィルタ信号Aab,Abc,Acaに基づいて回転部12の回転位置θeを取得する。回転位置θeは、LF制御信号生成部22におけるLF制御信号Vαl,Vβlの生成に用いられる。すなわち、回転位置θeに基づいて、モータ1の回転制御が行われる。
次に、モータ1の駆動時における制御装置10の処理について図2を参照しつつ説明する。制御装置10では、モータ1の駆動中、図2の処理が継続的に繰り返される。以下の説明における各信号に関する処理は、厳密には、各時刻における当該信号の値に関する処理を意味する。なお、図2中に破線の矩形にて示すステップS5aは、後述の第2の実施形態にて行われる処理であり、本実施形態では、行われない。
LF制御信号生成部22では、モータ1の回転部12を回転するためのα軸のLF制御信号Vαlおよびβ軸のLF制御信号Vβlが生成される。HF印加信号生成部21では、α軸のHF印加信号Vαhおよびβ軸のHF印加信号Vβhが生成される。角周波数をω、時間をtとして、α軸のHF印加信号Vαhおよびβ軸のHF印加信号Vβhは数1にて表される。

図3は、HF印加信号Vαh,Vβhの一例を示す図である。HF印加信号Vαh,Vβhの周波数は、LF制御信号Vαl,Vβlの周波数よりも高い。HF印加信号Vαh,Vβhによる応答結果である回転位置θeを予め計測し、ルックアップテーブルを作成することにより、各時刻におけるHF印加信号Vαh,Vβhによる応答結果である回転位置θeが取得されてもよい。α軸のHF印加信号Vαhはα軸のLF制御信号Vαlに重畳され、α軸の重畳信号Vαが生成される。β軸のHF印加信号Vβhはβ軸のLF制御信号Vβlに重畳され、β軸の重畳信号Vβが生成される。電圧生成部24では、α軸の重畳信号Vαおよびβ軸の重畳信号Vβに基づいて、三相電圧Va,Vb,Vcが生成される。
各電圧Va,Vb,Vcは、LF制御信号Vαl,Vβlに起因する駆動電圧と、HF印加信号Vαh,Vβhに起因する測定用電圧とを含む。すなわち、電圧供給部2では、回転部12を回転するための駆動電圧に、当該駆動電圧の周波数よりも高い所定の周波数の測定用電圧を重畳した複数の電圧Va,Vb,Vcが実質的に生成される。例えば、測定用電圧の周波数は、20kHz(キロヘルツ)以下である。好ましくは、測定用電圧の周波数は、500Hz以上1kHz以下である。複数の電圧Va,Vb,Vcは、モータ1の静止部11に供給される(ステップS1)。実際には、複数の電圧Va,Vb,Vcの静止部11への供給は連続的に行われ、後述するステップS2〜S4は、ステップS1に並行して行われる。
電流信号取得ユニット31では、静止部11に流れる三相電流ia,ib,icが取得される。抽出器32a〜32cでは、三相電流ia,ib,icにおけるHF印加信号Vαh,Vβhの周波数成分が、A軸、B軸およびC軸の抽出電流iah,ibh,ichとして抽出される(ステップS2)。以下、A軸、B軸およびC軸の抽出電流iah,ibh,ichをそれぞれ第1、第2および第3抽出電流iah,ibh,ichという。このように、電流抽出部3では、静止部11に流れる三相の電流ia,ib,icにおける、測定用電圧の周波数成分が、第1ないし第3抽出電流iah,ibh,ichとして抽出される。
図4は、第1ないし第3抽出電流iah,ibh,ichを示す図である。図4の縦軸は抽出電流iah,ibh,ichの値を示し、横軸は回転部12の回転位置を示す。図4に示すように、回転部12の回転位置に応じて抽出電流iah,ibh,ichの振幅が変化する。すなわち、抽出電流iah,ibh,ichの振幅の変化を示す振幅プロファイルは、回転部12の回転位置の関数である。抽出電流iah,ibh,ichの振幅プロファイルをAa,Ab,Acとして、抽出電流iah,ibh,ichは、数2にて表される。なお、数2では、回転部12の回転位置θeの関数である振幅プロファイルをAa(θe),Ab(θe),Ac(θe)として表し、時間の関数である抽出電流をiah(t),ibh(t),ich(t)として表している。後述の数3ないし数6において同様である。
合成信号取得部41では、数3により、第1ないし第3合成信号iabh,ibch,icahが生成される(ステップS3)。すなわち、乗算器41aでは、第1抽出電流iahと第2抽出電流ibhとを乗算することにより、第1合成信号iabhが生成される。乗算器41bでは、第2抽出電流ibhと第3抽出電流ichとを乗算することにより、第2合成信号ibchが生成される。乗算器41cでは、第3抽出電流ichと第1抽出電流iahとを乗算することにより、第3合成信号icahが生成される。
ここで、数3における式の導出から、各合成信号iabh,ibch,icahが低周波部と、高周波部の和であることが判る。低周波部は、回転部12の回転位置θeに依存する。高周波部は、HF印加信号Vαh,Vβhの周波数の関数である。第1ないし第3合成信号iabh,ibch,icahの低周波部は、数4のように、第1ないし第3合成信号iabh,ibch,icahに対するローパスフィルタ処理により、第1ないし第3フィルタ信号Aab,Abc,Acaとして取得可能である。
実際には、ローパスフィルタ42a〜42cにおけるローパスフィルタ処理により、第1ないし第3フィルタ信号Aab,Abc,Acaが取得される(ステップS4)。ローパスフィルタ42a〜42cのカットオフ周波数は、HF印加信号Vαh,Vβhの周波数、すなわち測定用電圧の周波数未満の任意の周波数である。カットオフ周波数は、例えば、駆動電圧の周波数の2倍以上の周波数である。ローパスフィルタ処理は、駆動電圧の周波数を含む低周波成分を通す。図5では、回転部12の回転位置に対する第1ないし第3フィルタ信号Aab,Abc,Acaの変化を示している。各フィルタ信号Aab,Abc,Acaは、回転位置θeの関数である。第1ないし第3フィルタ信号Aab,Abc,Acaは、突極性を有するモータ1の回転位置θeの算出に利用可能であるといえる。第1ないし第3フィルタ信号Aab,Abc,Acaは、回転位置取得部5に入力される。
図6は、回転位置取得部5にて取得される信号を示す図である。図6の最上段は第1ないし第3フィルタ信号Aab,Abc,Acaを示す。図6の上から二段目は後述のAαおよびAβを示し、三段目は後述のθを示す。図6の最下段は回転位置θeを示す。
回転位置取得部5では、第1ないし第3フィルタ信号Aab,Abc,AcaがA軸、B軸およびC軸における信号であるとして、第1ないし第3フィルタ信号Aab,Abc,Acaに対して、三相/二相変換(ABC−αβ変換)であるクラーク変換が行われる。これにより、図6の上から二段目に示すように、α軸のフィルタ信号Aαおよびβ軸のフィルタ信号Aβが取得される。続いて、α軸のフィルタ信号Aαおよびβ軸のフィルタ信号Aβを用いて、逆正接関数atan2(Aα,Aβ)が角度θとして求められる(図6の上から三段目参照)。すなわち、αβ座標系において、原点を始点とし、α軸上の位置がAαであり、かつ、β軸上の位置がAβである点を終点とするベクトルのβ軸に対する角度θが求められる。そして、角度θは所定の角度だけオフセットされることにより、回転部12の回転位置θeの0度に合わせられる。
ここで、図4に示すように、回転部12の回転位置の0度から360度までの1回転において、抽出電流の振幅プロファイルは、2周期分変化する。したがって、0度から720度までの範囲にオフセットされた上記角度を2で割って得た値が、図6の最下段に示す回転部12の回転位置θeとして取得される(ステップS5)。このように、回転位置取得部5では、フィルタ信号Aab,Abc,Acaに基づいて、モータ1の回転位置θeが推定される。
モータ1の駆動中、上記ステップS1〜S5が繰り返し行われる。既述のように、各ステップS1〜S5では、厳密には、各時刻における信号の値が取り扱われる。このとき、ステップS1における三相電圧Va,Vb,Vcの生成では、直前のステップS5にて取得された回転部12の回転位置θeの値、および、回転速度等の設定値に基づいて、LF制御信号Vαl,Vβlの値が生成される。すなわち、回転部12の回転位置θeに基づいて、モータ1の駆動電圧の位相が制御される。これにより、モータ1の高精度な回転制御が可能となる。
以上に説明したように、モータ1の制御装置10では、回転部12を回転するための駆動電圧に、駆動電圧の周波数よりも高い周波数の測定用電圧を重畳した三相の電圧が、静止部11に供給される。静止部11に流れる三相電流における、測定用電圧の周波数成分が、第1ないし第3抽出電流として抽出される。第1ないし第3抽出電流において、2つの抽出電流の各組合せにおける当該2つの抽出電流を掛け合わせることにより、第1ないし第3合成信号が取得される。第1ないし第3合成信号に対するローパスフィルタ処理により、第1ないし第3フィルタ信号が取得される。第1ないし第3フィルタ信号に基づいて、回転部12の回転位置が取得される。これにより、回転部12の回転位置を精度よく取得することができる。また、回転部12の回転位置に基づいて、モータ1の駆動電圧の位相が制御される。これにより、モータ1を精度よく回転させることができる。
制御装置10では、測定用電圧の付与、および、抽出電流に対する信号処理が固定座標系において行われる。これにより、上述のShinnaka, S.による手法、および、Corley, M. J.らによる手法における静止座標系と回転座標系との間の複雑な変換等を用いることなく、低い演算負荷にて回転位置を取得することができる。
また、Shinnaka, S.による手法、および、Corley, M. J.らによる手法では、低速では、誘起電圧が生成されず、回転方向が不明瞭である、および、分解能が低いという問題が生じる。したがって、回転位置を高精度に検出するためにオブザーバまたはPLLが必要となり、演算負荷が大きくなる。このような観点において、低速時の制御装置10の演算負荷を低減することができる。
図7は、本発明の例示的な第2の実施形態に係るモータ1の制御装置10の構成を示す図である。図7の制御装置10は、ローパスフィルタ処理部42と回転位置取得部5との間に振幅演算部43が追加される点で、図1の制御装置10と相違する。他の構成は、図1の制御装置10と同じであり、同じ構成要素に同じ符号を付す。
図7の制御装置10では、第1の実施形態と同様に、モータ1の静止部11に電圧Va,Vb,Vcが供給される(図2:ステップS1)。また、第1ないし第3抽出電流iah,ibh,ichから第1ないし第3合成信号iabh,ibch,icahが生成され、第1ないし第3フィルタ信号Aab,Abc,Acaが取得される(ステップS2〜S4)。第1ないし第3フィルタ信号Aab,Abc,Acaは、振幅演算部43に入力される。
振幅演算部43では、第1ないし第3フィルタ信号Aab,Abc,Acaを用いて、数5により、第1振幅信号Za、第2振幅信号Zb、および、第3振幅信号Zcが取得される(ステップS5a)。
第1ないし第3振幅信号Za,Zb,Zcは、A軸、B軸およびC軸の抽出電流iah,ibh,ichの振幅プロファイルAa,Ab,Acに等しい。すなわち、第1ないし第3振幅信号Za,Zb,Zcは、第1ないし第3抽出電流iah,ibh,ichの振幅をそれぞれ示す。振幅演算部43における数5の演算は、振幅を示す信号の再構築と捉えることができる。第1ないし第3振幅信号Za,Zb,Zcは、回転位置取得部5に入力される。
回転位置取得部5では、第1の実施形態における第1ないし第3フィルタ信号に対する処理と同様に、A軸、B軸およびC軸の第1ないし第3振幅信号Za,Zb,Zcに対して、三相/二相変換(ABC−αβ変換)が行われる。これにより、α軸の振幅信号およびβ軸の振幅信号が取得される。そして、α軸の振幅信号およびβ軸の振幅信号を用いて、回転部12の回転位置θeが取得される(ステップS5)。このように、回転位置取得部5では、第1ないし第3振幅信号Za,Zb,Zcに基づいて、モータ1の回転位置θeが精度よく推定される。
ところで、抽出電流を二乗した信号をローパスフィルタ処理して得られるフィルタ信号を、回転位置の推定に利用することが考えられる。しかしながら、この場合、当該フィルタ信号において高次高調波が発生してしまい、当該フィルタ信号に基づく回転位置の推定精度に一定の限界が生じてしまう。また、抽出電流の絶対値を示す信号をローパスフィルタ処理して得られるフィルタ信号を、回転位置の推定に利用することも考えられる。しかしながら、この場合も、当該フィルタ信号において高次高調波に起因するノイズが発生してしまい、回転位置の推定精度に一定の限界が生じてしまう。
これらの手法に対し、図7の制御装置10では、数5を用いて取得する振幅信号において高次高調波が発生しない、または、高次高調波の発生が抑制される。これにより、回転部12の回転位置をより精度よく取得することができる。
上記制御装置10では、様々な変形が可能である。
例えば、電圧供給部2では、A軸、B軸およびC軸のHF印加信号が生成され、A軸、B軸およびC軸のLF制御信号に重畳されてよい。
図7の制御装置10において、振幅演算部43では、数5以外の演算にて振幅信号が取得されてよい。例えば、数6の演算により、第1ないし第3フィルタ信号Aab,Abc,Acaから第1ないし第3振幅信号Za,Zb,Zcを取得することが可能である。
この場合も、第1ないし第3振幅信号Za,Zb,Zcに基づいて、回転部12の回転位置θeをある程度精度よく取得することができる。数6の第1ないし第3振幅信号Za,Zb,Zcも、実質的に、第1ないし第3抽出電流iah,ibh,ichの振幅を示すといえる。一方、制御装置10における演算負荷をより低減するという観点では、図1の制御装置10のように、振幅信号を求めることなく、回転位置を取得することが好ましい。
制御装置10では、モータ1のセンサレス位置検出および制御が行われるが、制御装置10の機能は、センサレス速度検出および制御、並びに、大きなトルクでの起動等を用途とするセンサレスでの初期位置検出に利用されてよい。
モータ1は、突極性を有するのであるならば、永久磁石同期モータ以外に、同期リラクタンスモータ等であってよい。
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わされてよい。
本発明は、突極性を有する様々なモータにおける回転位置の推定、および、制御に利用可能である。
1 モータ
2 電圧供給部
3 電流抽出部
5 回転位置取得部
10 制御装置
11 静止部
12 回転部
41 合成信号取得部
42 ローパスフィルタ処理部
43 振幅演算部
S1〜S5,S5a ステップ
2 電圧供給部
3 電流抽出部
5 回転位置取得部
10 制御装置
11 静止部
12 回転部
41 合成信号取得部
42 ローパスフィルタ処理部
43 振幅演算部
S1〜S5,S5a ステップ
Claims (4)
- a)突極性を有するモータの回転部を回転するための駆動電圧に、前記駆動電圧の周波数よりも高い所定の周波数の測定用電圧を重畳した三相の電圧を、前記モータの静止部に供給する工程と、
b)前記a)工程と並行して、前記静止部に流れる三相電流における前記所定の周波数の成分を、第1抽出電流、第2抽出電流および第3抽出電流として抽出する工程と、
c)前記第1抽出電流と前記第2抽出電流とを乗算した第1合成信号、前記第2抽出電流と前記第3抽出電流とを乗算した第2合成信号、および、前記第3抽出電流と前記第1抽出電流とを乗算した第3合成信号を取得する工程と、
d)前記駆動電圧の周波数を含む低周波成分を通すローパスフィルタ処理により、前記第1合成信号、前記第2合成信号および前記第3合成信号から、第1フィルタ信号、第2フィルタ信号および第3フィルタ信号をそれぞれ取得する工程と、
e)前記第1フィルタ信号、前記第2フィルタ信号および前記第3フィルタ信号に基づいて、前記回転部の回転位置を取得する工程と、
を備える、モータの回転位置推定方法。 - 前記e)工程が、
e1)前記第1ないし第3フィルタ信号から、前記第1抽出電流の振幅を示す第1振幅信号、前記第2抽出電流の振幅を示す第2振幅信号、および、前記第3抽出電流の振幅を示す第3振幅信号を取得する工程と、
e2)前記第1ないし第3振幅信号に基づいて前記回転部の回転位置を取得する工程と、
を含む、請求項1に記載のモータの回転位置推定方法。 - 前記e1)工程において、前記第1ないし第3フィルタ信号をAab(θe)、Abc(θe)、Aca(θe)(ただし、θeは前記回転部の回転位置を示す。)として、前記第1ないし第3振幅信号Za、Zb、Zcが、
- 突極性を有するモータの回転部を回転するための駆動電圧に、前記駆動電圧の周波数よりも高い所定の周波数の測定用電圧を重畳した三相の電圧を、前記モータの静止部に供給する電圧供給部と、
前記静止部に流れる三相電流における前記所定の周波数の成分を、第1抽出電流、第2抽出電流および第3抽出電流として抽出する電流抽出部と、
前記第1抽出電流と前記第2抽出電流とを乗算した第1合成信号、前記第2抽出電流と前記第3抽出電流とを乗算した第2合成信号、および、前記第3抽出電流と前記第1抽出電流とを乗算した第3合成信号を取得する合成信号取得部と、
前記駆動電圧の周波数を含む低周波成分を通すローパスフィルタ処理により、前記第1合成信号、前記第2合成信号および前記第3合成信号から、第1フィルタ信号、第2フィルタ信号および第3フィルタ信号をそれぞれ取得するローパスフィルタ処理部と、
前記第1フィルタ信号、前記第2フィルタ信号および前記第3フィルタ信号に基づいて、前記回転部の回転位置を取得する回転位置取得部と、
を備え、
前記電圧供給部が、前記回転部の回転位置に基づいて前記駆動電圧の位相を制御する、モータの制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015081011A JP2016201924A (ja) | 2015-04-10 | 2015-04-10 | モータの回転位置推定方法およびモータの制御装置 |
| US15/015,655 US9548687B2 (en) | 2015-04-10 | 2016-02-04 | Method of estimating rotational position of motor, and control apparatus of motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015081011A JP2016201924A (ja) | 2015-04-10 | 2015-04-10 | モータの回転位置推定方法およびモータの制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016201924A true JP2016201924A (ja) | 2016-12-01 |
Family
ID=57112118
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015081011A Pending JP2016201924A (ja) | 2015-04-10 | 2015-04-10 | モータの回転位置推定方法およびモータの制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9548687B2 (ja) |
| JP (1) | JP2016201924A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180081977A (ko) * | 2017-01-09 | 2018-07-18 | 엘지이노텍 주식회사 | 모터 제어장치 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108288936B (zh) * | 2018-01-03 | 2020-12-25 | 东南大学 | 一种永磁直线电机低速无位置传感器控制方法 |
| CN108683371B (zh) * | 2018-05-17 | 2020-07-14 | 苏州伟创电气科技股份有限公司 | 转子磁极初始位置辨识方法、装置、系统及电机驱动设备 |
| WO2019241272A1 (en) | 2018-06-11 | 2019-12-19 | Broan-Nutone Llc | Ventilation system with automatic flow balancing derived from neural network and methods of use |
| CN110190782B (zh) * | 2019-06-05 | 2020-10-27 | 哈尔滨工业大学 | 永磁电机无位置传感器控制方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5650708A (en) * | 1992-12-08 | 1997-07-22 | Nippondenso Co., Ltd. | Inverter control apparatus using a two-phase modulation method |
| JP4665360B2 (ja) | 2001-08-06 | 2011-04-06 | 株式会社安川電機 | 電動機制御装置 |
| JP4352678B2 (ja) | 2002-10-03 | 2009-10-28 | 株式会社安川電機 | 電動機の磁極位置推定装置および制御装置 |
| JP2005065452A (ja) | 2003-08-19 | 2005-03-10 | Nsk Ltd | 電動アクチュエータ |
| JP4807165B2 (ja) * | 2006-07-04 | 2011-11-02 | 株式会社デンソー | ロータ位置検出回路及びモータ駆動装置 |
| JP2009183034A (ja) | 2008-01-29 | 2009-08-13 | Toshiba Corp | モータ制御装置、モータ制御システムおよびモータ制御方法 |
| JP2009254045A (ja) | 2008-04-02 | 2009-10-29 | Nippon Reliance Kk | 同期電動機の磁極位置検出装置及び方法 |
| JP5385019B2 (ja) * | 2008-08-06 | 2014-01-08 | 株式会社日本自動車部品総合研究所 | 回転検出装置 |
| JP4751435B2 (ja) | 2008-10-09 | 2011-08-17 | 株式会社東芝 | モータ磁極位置検出装置,モータ制御装置,モータ駆動システム及び洗濯機 |
| KR101313386B1 (ko) | 2009-03-25 | 2013-10-14 | 미쓰비시덴키 가부시키가이샤 | 회전 전기 기기의 제어 장치 및 제어 방법 |
| JP5175887B2 (ja) | 2010-03-23 | 2013-04-03 | 株式会社東芝 | モータ制御装置及び電気機器 |
| JP5971707B2 (ja) * | 2011-08-29 | 2016-08-17 | 株式会社東芝 | 同期電動機のセンサレス制御装置ならびにインバータ装置 |
-
2015
- 2015-04-10 JP JP2015081011A patent/JP2016201924A/ja active Pending
-
2016
- 2016-02-04 US US15/015,655 patent/US9548687B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180081977A (ko) * | 2017-01-09 | 2018-07-18 | 엘지이노텍 주식회사 | 모터 제어장치 |
| KR102665480B1 (ko) | 2017-01-09 | 2024-05-13 | 엘지이노텍 주식회사 | 모터 제어장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9548687B2 (en) | 2017-01-17 |
| US20160301337A1 (en) | 2016-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4665360B2 (ja) | 電動機制御装置 | |
| KR101109909B1 (ko) | 교류 전동기 제어 장치 및 제어 방법 | |
| JP4425193B2 (ja) | モータの位置センサレス制御装置 | |
| JP4674516B2 (ja) | 同期モータの磁極位置推定方法 | |
| JP4059039B2 (ja) | 同期電動機の制御装置 | |
| JP5324646B2 (ja) | 回転電機の制御装置および制御方法 | |
| JP6324627B2 (ja) | 交流回転機の制御装置および電動パワーステアリングの制御装置 | |
| JP5720677B2 (ja) | 交流電動機の回転子位相速度推定装置 | |
| JP5523584B2 (ja) | 同期電動機のインダクタンス測定装置及び測定方法 | |
| JP2015136237A (ja) | 回転電機制御装置、回転電機制御方法、及び制御マップの作成方法 | |
| JP5321792B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| KR101638714B1 (ko) | 교류 회전기의 제어 장치 | |
| US9548687B2 (en) | Method of estimating rotational position of motor, and control apparatus of motor | |
| JP5493536B2 (ja) | 電動機の制御装置 | |
| US9634592B2 (en) | Method of estimating rotational position of motor, and control apparatus of motor | |
| JP4899509B2 (ja) | 交流電動機の回転子位相推定装置 | |
| JP2010035352A (ja) | 同期電動機のロータ位置推定装置 | |
| JP6766398B2 (ja) | 磁石温度推定方法、及び、磁石温度推定装置 | |
| JP6716993B2 (ja) | 磁石温度推定方法、及び、磁石温度推定装置 | |
| JP5106295B2 (ja) | 同期電動機のロータ位置推定装置 | |
| JP2016163515A (ja) | 同期機制御装置及び駆動システム | |
| JP6241807B2 (ja) | 交流電動機の駆動制御装置 | |
| JP2000324878A (ja) | 電動機の制御装置 | |
| JP2010022188A (ja) | モータの位置センサレス制御装置 | |
| JP5402106B2 (ja) | 電動機の制御装置及び電動機状態推定方法 |