JP2016202165A - 自律型芝刈機およびそのための置換可能なモジュール - Google Patents
自律型芝刈機およびそのための置換可能なモジュール Download PDFInfo
- Publication number
- JP2016202165A JP2016202165A JP2016029544A JP2016029544A JP2016202165A JP 2016202165 A JP2016202165 A JP 2016202165A JP 2016029544 A JP2016029544 A JP 2016029544A JP 2016029544 A JP2016029544 A JP 2016029544A JP 2016202165 A JP2016202165 A JP 2016202165A
- Authority
- JP
- Japan
- Prior art keywords
- lawn mower
- autonomous lawn
- module
- connection means
- electrical connection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/006—Control or measuring arrangements
- A01D34/008—Control or measuring arrangements for automated or remotely controlled operation
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Harvester Elements (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
2.欧州特許出願第2 286 653 A2号
3.ドイツ国特許出願DE 103 27 223 A1号
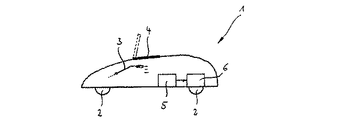
2 車輪
3 レバー
4 蓋
5 制御ユニット
6 駆動ユニット
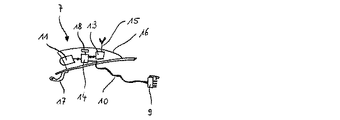
7 置換可能なモジュール
Claims (15)
- 電気接続手段に電気接続する制御ユニットと、
少なくとも一つの置換可能な部品と、を備える自律型芝刈機であって、
前記置換可能な部品を取り替えるとき、前記電気接続手段と前記置換可能な部品における接続の対応接続手段との接続および切断が行えるよう前記電気接続手段が配置されている、自律型芝刈機。 - 前記制御ユニットおよび前記電気接続手段は、該電気接続手段を介して受け取る信号に基づいて前記自律型芝刈機の駆動ユニットを制御するよう構成されている、請求項1に記載の自律型芝刈機。
- 前記電気接続手段が電力コネクタおよび/または通信コネクタを備える、請求項1または請求項2に記載の自律型芝刈機。
- 前記通信コネクタがCANバスコネクタである、請求項3に記載の自律型芝刈機。
- 前記置換可能な部品がサービス用の蓋を形成するよう設計されている、請求項1から4のいずれか1項に記載の自律型芝刈機。
- 前記制御ユニットが前記電気接続手段を介して更新可能である、請求項1から5のいずれか1項に記載の自律型芝刈機。
- 前記自律型芝刈機が複数の置換可能な部品およびそれぞれの電気接続手段を備え、該電気接続手段に接続されるとき前記複数の置換可能な部品の通信が可能になる、請求項1から6のいずれか1項に記載の自律型芝刈機。
- 自律型芝刈機の置換可能な部品を置き換えるためのモジュールであって、
信号生成ユニットと、
前記自律型芝刈機の制御ユニットに電気信号を送るための該自律型芝刈機の電気接続手段の対応接続手段と、
を備えるモジュール。 - 前記信号生成ユニットがカメラを備える、請求項8に記載のモジュール。
- 前記信号生成ユニットが前記カメラで撮像した画像に基づいて前記自律型芝刈機の制御を支援するための信号を生成するよう構成されたデータ処理ユニットを有する、請求項9に記載のモジュール。
- 前記データ処理ユニットがビジュアル障害物検出機能、ビジュアル・オドミトリ機能、ビジュアル境界認識機能、ビジュアル侵入者検出機能およびビジュアル芝生健康分析の少なくとも一つを実行するよう構成されている、請求項10に記載のモジュール。
- 前記信号生成ユニットがさらにワイヤレス通信手段を有する、請求項8から11のいずれか1項に記載のモジュール。
- 前記ワイヤレス通信がWLAN、ブルーツースまたはNFCを使用する、請求項12に記載のモジュール。
- 前記自律型芝刈機の制御ユニットのためのソフトウェアおよび/またはパラメータを保存するための記憶装置をさらに備える、請求項8から13のいずれか1項に記載のモジュール。
- 請求項1から7のいずれか1項に記載の自律型芝刈機と、請求項8から14のいずれか1項に記載のモジュールと、を備える自律型芝刈りシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15001128.6A EP3081068B1 (en) | 2015-04-17 | 2015-04-17 | Autonomous lawn mower, module for an autonomous lawn mower and system comprising such autonomous lawn mower and module |
| EP15001128.6 | 2015-04-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016202165A true JP2016202165A (ja) | 2016-12-08 |
| JP6704750B2 JP6704750B2 (ja) | 2020-06-03 |
Family
ID=52987816
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016029544A Expired - Fee Related JP6704750B2 (ja) | 2015-04-17 | 2016-02-19 | 自律型芝刈機およびそのための置換可能なモジュール |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9848529B2 (ja) |
| EP (1) | EP3081068B1 (ja) |
| JP (1) | JP6704750B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020090038A1 (ja) * | 2018-10-31 | 2020-05-07 | 本田技研工業株式会社 | 自律式作業機 |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT201600129749A1 (it) * | 2016-12-22 | 2018-06-22 | Dalesio Antonio | Kit di modifica per tagliaerba |
| JP6635909B2 (ja) * | 2016-12-28 | 2020-01-29 | 本田技研工業株式会社 | 作業機、制御装置及び制御用プログラム |
| EP3579155B1 (en) | 2017-01-31 | 2021-11-17 | Honda Motor Co., Ltd. | Unmanned work system, management server, and unmanned work machine |
| WO2018142483A1 (ja) | 2017-01-31 | 2018-08-09 | 本田技研工業株式会社 | 無人作業システム、管理サーバー、及び無人作業機 |
| CN108427409A (zh) * | 2017-02-15 | 2018-08-21 | 苏州宝时得电动工具有限公司 | 自动工作系统,自移动设备及其控制方法 |
| US10869426B2 (en) * | 2017-11-27 | 2020-12-22 | Lely Patent N.V. | Mowing device |
| US10561063B2 (en) * | 2018-01-10 | 2020-02-18 | Honda Motor Co., Ltd. | Autonomous lawnmower using laser scanner |
| JP6997293B2 (ja) | 2018-03-30 | 2022-01-17 | 本田技研工業株式会社 | 自律走行作業機、及び制御システム |
| CN112165856B (zh) * | 2018-06-13 | 2023-09-12 | 苏州宝时得电动工具有限公司 | 自移动设备、功能模块以及自动工作系统 |
| US12185662B2 (en) * | 2018-11-20 | 2025-01-07 | Honda Motor Co., Ltd. | Control apparatus of autonomously navigating work machine |
| US12117532B1 (en) | 2019-01-17 | 2024-10-15 | Renu Robotics Corp. | Mobile base station calibration and recalibration |
| US12253352B1 (en) | 2019-01-17 | 2025-03-18 | Renu Robotics Corp. | Autonomous vehicle charging station |
| US12123702B1 (en) | 2019-09-23 | 2024-10-22 | Renu Robotics Corp. | Autonomous vehicle terrain prediction and detection |
| US12163774B1 (en) | 2019-01-17 | 2024-12-10 | Renu Robotics Corp. | Solar-based semi-mobile recharge skid |
| US11951977B1 (en) | 2019-09-23 | 2024-04-09 | Renu Robotics Corp. | Autonomous vehicle panel and post detection |
| US12193358B1 (en) | 2019-09-23 | 2025-01-14 | Renu Robotics Corp. | Autonomous vehicle site setup |
| US12247828B1 (en) | 2019-01-17 | 2025-03-11 | Renu Robotics Corp. | Autonomous vehicle terrain prediction and detection |
| US12038752B1 (en) | 2019-01-17 | 2024-07-16 | Renu Robotics Corp. | Autonomous vehicle navigational fallover |
| US12240446B1 (en) | 2019-01-17 | 2025-03-04 | Renu Robotics Corp. | Autonomous vehicle panel and post detection |
| US12245545B1 (en) | 2019-01-17 | 2025-03-11 | Renu Robotics Corp. | Autonomous vehicle site setup |
| CN113099820B (zh) * | 2020-01-09 | 2023-03-28 | 苏州宝时得电动工具有限公司 | 一种智能割草机 |
| CN115515416B (zh) * | 2020-05-08 | 2024-11-08 | 胡斯华纳有限公司 | 设置有将封闭空间分隔为上部空间和切割空间的分隔板的割草机 |
| US12296694B2 (en) | 2021-03-10 | 2025-05-13 | Techtronic Cordless Gp | Lawnmowers |
| US12416492B1 (en) | 2021-08-13 | 2025-09-16 | Renu Robotics Corp. | Autonomous vehicle sensing through visually obscuring vegetation |
| US12358575B1 (en) | 2021-08-20 | 2025-07-15 | Renu Robotics Corp. | Autonomous vehicle connected tool interchange systems and methods |
| CN114145125B (zh) * | 2021-10-15 | 2023-08-08 | 湖南省农业装备研究所 | 一种自锁式自调电动割草机 |
| US12443180B2 (en) | 2021-11-10 | 2025-10-14 | Techtronic Cordless Gp | Robotic lawn mowers |
| CN114885664B (zh) * | 2022-04-28 | 2023-06-02 | 格力博(江苏)股份有限公司 | 一种割草机控制方法、割草机系统及割草机 |
| AU2023200381A1 (en) | 2022-01-31 | 2023-08-17 | Techtronic Cordless Gp | Robotic garden tool |
| EP4476598A2 (en) | 2022-02-07 | 2024-12-18 | Doosan Bobcat North America, Inc. | Path determination for automatic mowers |
| EP4270138A1 (en) | 2022-04-28 | 2023-11-01 | Techtronic Cordless GP | Creation of a virtual boundary for a robotic garden tool |
| US12472611B2 (en) | 2022-05-31 | 2025-11-18 | Techtronic Cordless Gp | Peg driver |
| CN115039560B (zh) | 2022-07-01 | 2024-11-05 | 洛阳拖拉机研究所有限公司 | 一种基于can总线的电动割草机电气控制系统 |
| EP4310621B1 (en) | 2022-07-19 | 2025-02-12 | Techtronic Cordless GP | Display for controlling robotic tool |
| AU2023206123A1 (en) | 2022-07-29 | 2024-02-15 | Techtronic Cordless Gp | Generation of a cryptography key for a robotic garden tool |
| EP4388847B1 (en) | 2022-12-23 | 2025-02-12 | Honda Research Institute Europe GmbH | Weed control system |
| CN115968634B (zh) * | 2022-12-26 | 2025-12-23 | 南京苏美达智能技术有限公司 | 一种智能遥控割草机 |
| JP2025065617A (ja) * | 2023-10-10 | 2025-04-22 | 株式会社やまびこ | 機能追加装置及び作業機 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140121881A1 (en) * | 2012-10-23 | 2014-05-01 | Daniel A. DIAZDELCASTILLO | Autonomous and remote control all purpose machine (arcapm) |
| JP2015026247A (ja) * | 2013-07-26 | 2015-02-05 | ヤンマー株式会社 | 電動作業車両 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3570227A (en) | 1969-01-16 | 1971-03-16 | Mowbot Inc | Self-propelled random motion lawnmower |
| US3698523A (en) * | 1969-10-20 | 1972-10-17 | Mowbot Inc | Self-propelled random motion lawnmower |
| WO1990004324A1 (en) * | 1986-02-04 | 1990-05-03 | Technical Solutions, Inc. | Method of guiding a robotic lawnmower |
| US20030144774A1 (en) * | 2002-01-29 | 2003-07-31 | Trissel Ronald L. | Kit and method for converting conventional lawnmower to a robotic lawnmower |
| DE10327223A1 (de) | 2003-06-17 | 2005-01-05 | Gunter Arnold | Selbstfahrender Rasenmäher mit Grasdetektor |
| US20060059880A1 (en) * | 2004-09-13 | 2006-03-23 | Angott Paul G | Unmanned utility vehicle |
| DE102009028598A1 (de) | 2009-08-17 | 2011-03-03 | Robert Bosch Gmbh | Autonome mobile Plattform zur Oberflächenbearbeitung |
| US8295979B2 (en) * | 2010-01-06 | 2012-10-23 | Deere & Company | Adaptive scheduling of a service robot |
| US8336282B2 (en) * | 2010-07-28 | 2012-12-25 | Deere & Company | Robotic mower housing |
| US9241441B2 (en) * | 2012-02-22 | 2016-01-26 | Husqvarna Ab | Robotic lawnmower |
| EP2884364B1 (en) * | 2013-12-12 | 2018-09-26 | Hexagon Technology Center GmbH | Autonomous gardening vehicle with camera |
-
2015
- 2015-04-17 EP EP15001128.6A patent/EP3081068B1/en active Active
-
2016
- 2016-02-19 JP JP2016029544A patent/JP6704750B2/ja not_active Expired - Fee Related
- 2016-03-24 US US15/079,115 patent/US9848529B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140121881A1 (en) * | 2012-10-23 | 2014-05-01 | Daniel A. DIAZDELCASTILLO | Autonomous and remote control all purpose machine (arcapm) |
| JP2015026247A (ja) * | 2013-07-26 | 2015-02-05 | ヤンマー株式会社 | 電動作業車両 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020090038A1 (ja) * | 2018-10-31 | 2020-05-07 | 本田技研工業株式会社 | 自律式作業機 |
| JPWO2020090038A1 (ja) * | 2018-10-31 | 2021-09-16 | 本田技研工業株式会社 | 自律式作業機 |
| JP7184920B2 (ja) | 2018-10-31 | 2022-12-06 | 本田技研工業株式会社 | 自律式作業機 |
| US12079002B2 (en) | 2018-10-31 | 2024-09-03 | Honda Motor Co., Ltd. | Autonomous work machine |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160302354A1 (en) | 2016-10-20 |
| US9848529B2 (en) | 2017-12-26 |
| EP3081068A1 (en) | 2016-10-19 |
| EP3081068B1 (en) | 2021-06-09 |
| JP6704750B2 (ja) | 2020-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6704750B2 (ja) | 自律型芝刈機およびそのための置換可能なモジュール | |
| CN117561868B (zh) | 自移动设备、功能模块以及自动工作系统 | |
| JP4459994B2 (ja) | 更新可能なプログラムを用いるプログラム可能なカメラ制御ユニット | |
| JP5616367B2 (ja) | ヘッドセットに基づく通信プラットホーム | |
| EP2132972B1 (en) | System and method employing short range communications for establishing performance parameters of an exemplar agricultural machine among a plurality of like-purpose agricultural machines | |
| EP2870853A1 (en) | Lawn mower with remote control | |
| US9554509B2 (en) | Agricultural harvesting machine with an exchangeable crop processing element | |
| US20150006025A1 (en) | Lawn care vehicle with modular ride information system | |
| FR3070966A1 (fr) | Procede de commande eloignee pour un vehicule aerien sans pilote | |
| CN108431709A (zh) | 机电设备的维护方法 | |
| CN111508218A (zh) | 一种遥控无人设备的遥控方法及遥控系统 | |
| JP6975204B2 (ja) | 対物レンズ本体、対物レンズ及び対物レンズ系 | |
| WO2020175285A1 (ja) | 自動作業システム | |
| US20250374846A1 (en) | Cooperative monitoring systems for agricultural implements and methods for same | |
| US12587729B2 (en) | Method and system for a trail camera with modular Fresnel lenses | |
| CN206433119U (zh) | 基于可穿戴式组合体的通信处理系统 | |
| US20140152857A1 (en) | Camera Apparatus and System | |
| KR20200010134A (ko) | 분리, 조립, 확장 및 축소되는 스마트 하우스를 이용한 반려동물 관리 시스템 | |
| JP3203587U (ja) | 重機用視認支援システム | |
| JP5443278B2 (ja) | レンズ装置に取り付けられる無線アダプタ | |
| KR20220087554A (ko) | 렌즈 장치 | |
| JP7483825B2 (ja) | ソフトウェア管理システム及びソフトウェア管理方法 | |
| CN115951623A (zh) | 控制方法、装置、系统、移动体、电子设备及存储介质 | |
| WO2019004098A1 (ja) | 撮像システム、撮像端末、撮像方法、およびプログラム | |
| AU2016200183A1 (en) | Remote camera operating and management system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20170802 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170804 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181024 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190716 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200421 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200513 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6704750 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |