JP2016226236A - 非接触給電装置及び非接触受電装置 - Google Patents
非接触給電装置及び非接触受電装置 Download PDFInfo
- Publication number
- JP2016226236A JP2016226236A JP2015113203A JP2015113203A JP2016226236A JP 2016226236 A JP2016226236 A JP 2016226236A JP 2015113203 A JP2015113203 A JP 2015113203A JP 2015113203 A JP2015113203 A JP 2015113203A JP 2016226236 A JP2016226236 A JP 2016226236A
- Authority
- JP
- Japan
- Prior art keywords
- coil
- detection
- power supply
- power
- electromotive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
【解決手段】給電コイルの中心軸を含む中心横断面の面内に、巻軸が中心横断面に対し垂直となる向きに配設された検出コイルを備え、検出コイルは、該検出コイルのコイル環内に給電コイルを内包するように配置され、検出コイルに発生する起電圧の強度を検出する起電力検出手段と、給電コイルに供給される電圧の位相と検出コイルに発生する起電圧の位相との位相差を検出する位相差検出手段と、起電力検出手段が検出する起電圧の強度を閾値判定し受電コイルの位置ずれの有無を判定する位置ずれ検出手段と、前記位相差により、検出コイルの中心軸方向の位置ずれ向きを検出する位置ずれ方向検出手段とを備えた。
【選択図】図2
Description
前記給電コイルの中心軸を含む面である第1の中心横断面の面内に、巻軸が前記第1の中心横断面に対し垂直となる向きに配設された第1の検出コイルを備え、
前記第1の検出コイルは、該第1の検出コイルのコイル環内に前記給電コイルを内包するように配置されたものであり、
前記第1の検出コイルに発生する起電圧又は起電流の強度を検出する第1の起電力検出手段と、
前記給電コイルに供給される電圧又は電流の位相と前記第1の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第1の位相差検出手段と、
前記第1の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルに対する前記受電コイルの位置ずれの有無を判定する位置ずれ検出手段と、
前記第1の位相差検出手段が検出する位相差により、前記第1の検出コイルの中心軸方向(以下「x軸方向」という。)の位置ずれ向きを検出する第1の位置ずれ方向検出手段と、を備えたことを特徴とする。
前記第2の検出コイルは、該第2の検出コイルのコイル環内に前記給電コイルを内包するように配置されたものであり、
前記第2の検出コイルに発生する起電圧又は起電流の強度を検出する第2の起電力検出手段と、
前記給電コイルに供給される電圧又は電流の位相と前記第2の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第2の位相差検出手段と、
前記第2の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルに対する前記受電コイルの位置ずれの有無を判定する位置ずれ検出手段と、
前記第2の位相差検出手段が検出する位相差により、前記第2の検出コイルの中心軸方向(以下「y軸方向」という。)の位置ずれ向きを検出する第2の位置ずれ方向検出手段と、を備えたことを特徴とする。
前記給電コイルに供給される電圧又は電流の位相と前記第3の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第3の位相差検出手段と、
前記第3の位相差検出手段により検出される位相差が所定の値となるように、前記給電コイルに供給される電圧又は電流の周波数を制御する共振周波数制御手段と、を備えたことを特徴とする。
前記第3の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルの近傍に前記受電コイルが存在するか否かを判定する存否検出手段と、を備えたことを特徴とする。
前記受電コイルの中心軸を含む面である第1の中心横断面の面内に、巻軸が前記第1の中心横断面に対し垂直となる向きに配設された第1の検出コイルを備え、
前記第1の検出コイルは、該第1の検出コイルのコイル環内に前記受電コイルを内包するように配置されたものであり、
前記第1の検出コイルに発生する起電圧又は起電流の強度を検出する第1の起電力検出手段と、
前記給電コイルが作る交番磁場により前記受電コイルに誘導される電圧又は電流の位相と前記第1の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第1の位相差検出手段と、
前記第1の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルに対する前記受電コイルの位置ずれの有無を判定する第1の位置ずれ検出手段と、
前記第1の位相差検出手段が検出する位相差により、前記第1の検出コイルの中心軸方向(以下「x軸方向」という。)の位置ずれ向き及び位置ずれ量を検出する第1の位置ずれ方向検出手段と、を備えたことを特徴とする。
前記第2の検出コイルは、該第2の検出コイルのコイル環内に前記受電コイルを内包するように配置されたものであり、
前記第2の検出コイルに発生する起電圧又は起電流の強度を検出する第2の起電力検出手段と、
前記給電コイルが作る交番磁場により前記受電コイルに誘導される電圧又は電流の位相と前記第2の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第2の位相差検出手段と、
前記第2の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルに対する前記受電コイルの位置ずれの有無を判定する第2の位置ずれ検出手段と、
前記第2の位相差検出手段が検出する位相差により、前記第2の検出コイルの中心軸方向(以下「y軸方向」という。)の位置ずれ向き及び位置ずれ量を検出する第2の位置ずれ量検出手段と、を備えたことを特徴とする。
図4は、非接触給電装置1の給電コイル3に非接触受電装置2の受電コイル30が接近した際の、両コイル近傍に形成される磁界の変化を表した模式図である。尚、図4において、磁束は点線により示されている。図4では、(d),(c),(b),(a)の順に受電コイル30が給電コイル3に順次接近しており、図4(a)は、受電コイル30と給電コイル3が完全に共鳴した状態を表している。尚、図4は、直流磁場近似したものであり、実際には給電コイル3及び受電コイル30は交流通電されるため交番磁場となり、図4とは多少異なる磁力線分布となる。
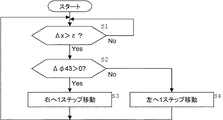
次に、図1の非接触給電装置1について、具体的な位置ずれ補正制御における動作を説明する。図8は、非接触給電装置1の移動制御回路17の位置ずれ補正制御動作を表すフローチャートである。尚、ここでは、給電コイル3に対し受電コイル30がx軸方向に左にずれると、検出コイル4には位相が90度進んだ誘導電圧が発生するものとする。
2 非接触受電装置
3 給電コイル
3a コイルコア
3b コイルワイヤ
4,4a,4b 検出コイル
5 検出コイル
6 給電コイルアッセンブリ
7,7a,7b モータ
10 電源回路
11 発振回路
12 通電制御回路
13,13a,13b,13c 起電力検出回路
16,16a,16b 位置ずれ検出回路
17 移動制御回路
18,18a,18b,18c 位相差検出回路
19,19a,19b 位置ずれ方向検出回路
20 共振周波数制御回路
30 受電コイル
31 整流回路
32 2次電池
Claims (6)
- 交流電力が給電される給電コイルを具備する非接触給電装置と、前記給電コイルに対し着脱可能に装着され、前記給電コイルと共鳴して前記給電コイルから電力供給を受ける受電コイルを具備する非接触受電装置とを備えた非接触給電システムにおいて使用される非接触給電装置であって、
前記給電コイルの中心軸を含む面である第1の中心横断面の面内に、巻軸が前記第1の中心横断面に対し垂直となる向きに配設された第1の検出コイルを備え、
前記第1の検出コイルは、該第1の検出コイルのコイル環内に前記給電コイルを内包するように配置されたものであり、
前記第1の検出コイルに発生する起電圧又は起電流の強度を検出する第1の起電力検出手段と、
前記給電コイルに供給される電圧又は電流の位相と前記第1の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第1の位相差検出手段と、
前記第1の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルに対する前記受電コイルの位置ずれの有無を判定する第1の位置ずれ検出手段と、
前記第1の位相差検出手段が検出する位相差により、前記第1の検出コイルの中心軸方向(以下「x軸方向」という。)の位置ずれ向きを検出する第1の位置ずれ方向検出手段と、を備えたことを特徴とする非接触給電装置。 - 前記給電コイルの中心軸を含み、前記第1の中心横断面に垂直な面である第2の中心横断面の面内に、巻軸が前記第2の中心横断面に対し垂直となる向きに配設された第2の検出コイルを備え、
前記第2の検出コイルは、該第2の検出コイルのコイル環内に前記給電コイルを内包するように配置されたものであり、
前記第2の検出コイルに発生する起電圧又は起電流の強度を検出する第2の起電力検出手段と、
前記給電コイルに供給される電圧又は電流の位相と前記第2の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第2の位相差検出手段と、
前記第2の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルに対する前記受電コイルの位置ずれの有無を判定する第2の位置ずれ検出手段と、
前記第2の位相差検出手段が検出する位相差により、前記第2の検出コイルの中心軸方向(以下「y軸方向」という。)の位置ずれ向きを検出する第2の位置ずれ方向検出手段と、を備えたことを特徴とする請求項1記載の非接触給電装置。 - 前記給電コイルの側部に、巻軸が、前記給電コイルに前記受電コイルが接近していない状態に於いて前記給電コイルが作る磁束に対し垂直となる向きに配設された第3の検出コイルと、
前記給電コイルに供給される電圧又は電流の位相と前記第3の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第3の位相差検出手段と、
前記第3の位相差検出手段により検出される位相差が所定の値となるように、前記給電コイルに供給される電圧又は電流の周波数を制御する共振周波数制御手段と、を備えたことを特徴とする請求項1又は2記載の非接触給電装置。 - 前記第3の検出コイルに発生する起電圧又は起電流の強度を検出する第3
の起電力検出手段と、
前記第3の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルの近傍に前記受電コイルが存在するか否かを判定する存否検出手段と、を備えたことを特徴とする請求項3記載の非接触給電装置。 - 交流電力が給電される給電コイルを具備する非接触給電装置と、前記給電コイルに対し着脱可能に装着され、前記給電コイルと共鳴して前記給電コイルから電力供給を受ける受電コイルを具備する非接触受電装置とを備えた非接触給電システムにおいて使用される非接触受電装置であって、
前記受電コイルの中心軸を含む面である第1の中心横断面の面内に、巻軸が前記第1の中心横断面に対し垂直となる向きに配設された第1の検出コイルを備え、
前記第1の検出コイルは、該第1の検出コイルのコイル環内に前記受電コイルを内包するように配置されたものであり、
前記第1の検出コイルに発生する起電圧又は起電流の強度を検出する第1の起電力検出手段と、
前記給電コイルが作る交番磁場により前記受電コイルに誘導される電圧又は電流の位相と前記第1の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第1の位相差検出手段と、
前記第1の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルに対する前記受電コイルの位置ずれの有無を判定する第1の位置ずれ検出手段と、
前記第1の位相差検出手段が検出する位相差により、前記第1の検出コイルの中心軸方向(以下「x軸方向」という。)の位置ずれ向きを検出する第1の位置ずれ方向検出手段と、を備えたことを特徴とする非接触受電装置。 - 前記受電コイルの中心軸を含み、前記第1の中心横断面に垂直な面である第2の中心横断面の面内に、巻軸が前記第2の中心横断面に対し垂直となる向きに配設された第2の検出コイルを備え、
前記第2の検出コイルは、該第2の検出コイルのコイル環内に前記受電コイルを内包するように配置されたものであり、
前記第2の検出コイルに発生する起電圧又は起電流の強度を検出する第2の起電力検出手段と、
前記給電コイルが作る交番磁場により前記受電コイルに誘導される電圧又は電流の位相と前記第2の検出コイルに発生する起電圧又は起電流の位相との位相差を検出する第2の位相差検出手段と、
前記第2の起電力検出手段が検出する起電圧又は起電流の強度を閾値判定することにより、前記給電コイルに対する前記受電コイルの位置ずれの有無を判定する第2の位置ずれ検出手段と、
前記第2の位相差検出手段が検出する位相差により、前記第2の検出コイルの中心軸方向(以下「y軸方向」という。)の位置ずれ向きを検出する第2の位置ずれ方向検出手段と、を備えたことを特徴とする請求項5記載の非接触受電装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015113203A JP6507036B2 (ja) | 2015-06-03 | 2015-06-03 | 非接触給電装置及び非接触受電装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015113203A JP6507036B2 (ja) | 2015-06-03 | 2015-06-03 | 非接触給電装置及び非接触受電装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016226236A true JP2016226236A (ja) | 2016-12-28 |
| JP6507036B2 JP6507036B2 (ja) | 2019-04-24 |
Family
ID=57746087
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015113203A Expired - Fee Related JP6507036B2 (ja) | 2015-06-03 | 2015-06-03 | 非接触給電装置及び非接触受電装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6507036B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018161012A (ja) * | 2017-03-23 | 2018-10-11 | 東芝テック株式会社 | 非接触電力伝送装置および送電装置 |
| US20210384772A1 (en) * | 2018-05-01 | 2021-12-09 | Global Energy Transmission, Co. | Systems and methods for wireless power transferring |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62135789A (ja) * | 1985-12-09 | 1987-06-18 | Toyota Motor Corp | 車両検出装置 |
| JPS62175687A (ja) * | 1986-01-30 | 1987-08-01 | Osaka Gas Co Ltd | 隠蔽場所に設けられている物体の検出装置 |
| JPH03119207U (ja) * | 1990-03-16 | 1991-12-09 | ||
| JP2009089465A (ja) * | 2007-09-27 | 2009-04-23 | Panasonic Corp | 充電器および充電システム |
| JP2009539090A (ja) * | 2006-06-02 | 2009-11-12 | ソシエテ プリムス フランセーズ | 地中に埋設された又は土木建造物中に埋込された埋設パイプ又は他の物体を識別及び追跡するのに適する検出システム |
| US20100164499A1 (en) * | 2006-09-04 | 2010-07-01 | Crawford Thomas M | Apparatus for and method of detecting a conductive object |
| US20100201315A1 (en) * | 2007-09-27 | 2010-08-12 | Panasonic Corporation | Electronic device, charger, and charging device |
| US20110049997A1 (en) * | 2009-09-03 | 2011-03-03 | Tdk Corporation | Wireless power feeder and wireless power transmission system |
| JP2011083178A (ja) * | 2009-09-08 | 2011-04-21 | Tdk Corp | ワイヤレス給電装置およびワイヤレス電力伝送システム |
| US20120161533A1 (en) * | 2010-12-28 | 2012-06-28 | Tdk Corporation | Wireless power feeder, wireless power receiver, and wireless power transmission system |
| WO2014156655A1 (ja) * | 2013-03-29 | 2014-10-02 | 日産自動車株式会社 | 非接触電力伝送装置 |
-
2015
- 2015-06-03 JP JP2015113203A patent/JP6507036B2/ja not_active Expired - Fee Related
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62135789A (ja) * | 1985-12-09 | 1987-06-18 | Toyota Motor Corp | 車両検出装置 |
| JPS62175687A (ja) * | 1986-01-30 | 1987-08-01 | Osaka Gas Co Ltd | 隠蔽場所に設けられている物体の検出装置 |
| JPH03119207U (ja) * | 1990-03-16 | 1991-12-09 | ||
| JP2009539090A (ja) * | 2006-06-02 | 2009-11-12 | ソシエテ プリムス フランセーズ | 地中に埋設された又は土木建造物中に埋込された埋設パイプ又は他の物体を識別及び追跡するのに適する検出システム |
| US20100164499A1 (en) * | 2006-09-04 | 2010-07-01 | Crawford Thomas M | Apparatus for and method of detecting a conductive object |
| JP2009089465A (ja) * | 2007-09-27 | 2009-04-23 | Panasonic Corp | 充電器および充電システム |
| US20100201315A1 (en) * | 2007-09-27 | 2010-08-12 | Panasonic Corporation | Electronic device, charger, and charging device |
| US20110049997A1 (en) * | 2009-09-03 | 2011-03-03 | Tdk Corporation | Wireless power feeder and wireless power transmission system |
| JP2011083178A (ja) * | 2009-09-08 | 2011-04-21 | Tdk Corp | ワイヤレス給電装置およびワイヤレス電力伝送システム |
| US20120161533A1 (en) * | 2010-12-28 | 2012-06-28 | Tdk Corporation | Wireless power feeder, wireless power receiver, and wireless power transmission system |
| WO2012090701A1 (ja) * | 2010-12-28 | 2012-07-05 | Tdk株式会社 | ワイヤレス給電装置、ワイヤレス受電装置、ワイヤレス電力伝送システム |
| WO2014156655A1 (ja) * | 2013-03-29 | 2014-10-02 | 日産自動車株式会社 | 非接触電力伝送装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018161012A (ja) * | 2017-03-23 | 2018-10-11 | 東芝テック株式会社 | 非接触電力伝送装置および送電装置 |
| US20210384772A1 (en) * | 2018-05-01 | 2021-12-09 | Global Energy Transmission, Co. | Systems and methods for wireless power transferring |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6507036B2 (ja) | 2019-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5488760B2 (ja) | ワイヤレス給電装置、ワイヤレス受電装置およびワイヤレス電力伝送システム | |
| US9595834B2 (en) | Wireless power transmission system and power transmission device | |
| JP5994771B2 (ja) | ワイヤレス給電装置、ワイヤレス受電装置、ワイヤレス電力伝送システムおよびコイル | |
| JP5522271B2 (ja) | ワイヤレス給電装置、ワイヤレス受電装置、ワイヤレス電力伝送システム | |
| JP5953785B2 (ja) | ワイヤレス給電装置およびワイヤレス電力伝送システム | |
| US8922064B2 (en) | Wireless power feeder, wireless power receiver, and wireless power transmission system, and coil | |
| JP5549745B2 (ja) | ワイヤレス給電装置およびワイヤレス電力伝送システム | |
| JP6416567B2 (ja) | 無線給電装置 | |
| US10374461B2 (en) | Power receiver and power transmitting system | |
| US9270124B2 (en) | Contactless power supply device | |
| CN105765828A (zh) | 检测无线感应电力传输中的线圈对准误差的方法和设备 | |
| KR20160046913A (ko) | 송전 장치 | |
| Cai et al. | Robust wide-area wireless charging of multipath movable receivers: A coupling mechanism and simplified configuration strategy | |
| JP5796444B2 (ja) | 非接触給電装置 | |
| JP5389735B2 (ja) | 給電指示の伝送装置 | |
| KR102155896B1 (ko) | 배터리 충전 장치 및 그 제어 방법 | |
| JPWO2018221532A1 (ja) | 送電装置、無線電力伝送システム、および制御装置 | |
| JP2016226236A (ja) | 非接触給電装置及び非接触受電装置 | |
| US10476311B2 (en) | Power receiver and power transmitting system | |
| CN117879182A (zh) | 非接触供电设备 | |
| JP2016063698A (ja) | 無線給電装置 | |
| JP2020156307A (ja) | 非接触給電装置 | |
| JP2013251956A (ja) | 電力搬送方法 | |
| JPH11206043A (ja) | 非接触給電装置 | |
| JP7682441B2 (ja) | 磁気共鳴型ワイヤレス給電装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180521 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6507036 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |