JP2017001042A - ワークキャリッジ及びワーク搬送装置 - Google Patents
ワークキャリッジ及びワーク搬送装置 Download PDFInfo
- Publication number
- JP2017001042A JP2017001042A JP2015114263A JP2015114263A JP2017001042A JP 2017001042 A JP2017001042 A JP 2017001042A JP 2015114263 A JP2015114263 A JP 2015114263A JP 2015114263 A JP2015114263 A JP 2015114263A JP 2017001042 A JP2017001042 A JP 2017001042A
- Authority
- JP
- Japan
- Prior art keywords
- main frame
- work
- work carriage
- arm
- workpiece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Manipulator (AREA)
Abstract
【解決手段】 移送装置により移送されるワークキャリッジの吸着部の位置を移動変更する駆動装置とを備えたワーク搬送装置のワークキャリッジは、ワーク搬送方向に直交した延設される両端部を移送装置により支持されたメインフレームに走行部材が移動可能に配設され、その走行部材に駆動装置を着脱自在に連結する駆動連結部を設け、走行部材からワーク搬送方向前方及び後方に延びる前後一対のアーム部材に複数の吸着部を設け、走行部材に駆動連結部及び駆動装置の非連結状態で制止固定する一方、その連結状態で移動可能に制止解除するブレーキ装置を設ける。
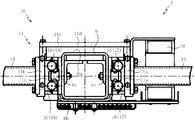
【選択図】 図2
Description
2 ワークキャリッジ
3 移送装置
4 駆動装置
5 ロボットアーム(移送装置の一部)
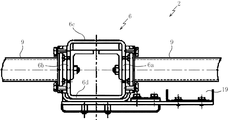
6 メインフレーム
6a 前面部(メインフレームにおけるワークの搬送方向前面部)
6b 前面部(メインフレームにおけるワークの搬送方向後面部)
6c 上面部(メインフレームの上面部)
6d 下面部(メインフレームの下面部)
6e ガイドレール
7 吸着部
8 移動体
8a 連結ピン
9 固定アーム部材(前後一対の固定アーム部材)
10 可動アームユニット
11 走行部材
11a 前腕台座
11b 後腕台座
11c 連結板(連設部)
11d 駆動連結穴(駆動連結部)
11e ランナー
12 アタッチメント
13 バキュームカップ(吸着部)
14 移動アーム部材(前後一対のアーム部材)
15 固定具
16 空気圧クランパ−(ブレーキ装置)
17 前腕クランパ−(前腕ブレーキ、ブレーキ装置の一部)
18 後腕クランパ−(後腕ブレーキ、ブレーキ装置の一部)
19 ケーブル類支持案内部材
20 プレス装置(加工装置)
A1 第1可動範囲(可動アームユニットの一方の可動範囲)
A2 第2可動範囲(可動アームユニットの他方の可動範囲)
W ワーク
Claims (9)
- ワークを吸着して吊下する複数の吸着部を有しているワークキャリッジと、そのワークキャリッジを移送してワークを加工装置へ搬送する移送装置と、その移送装置により移送される前記ワークキャリッジにおける前記吸着部の位置を移動変更する駆動装置とを備えたワーク搬送装置における前記ワークキャリッジにおいて、
前記移送装置によるワークの搬送方向に直交して延設され、その延設方向両端部が前記移送装置に連結されて支持され、その移送装置によりワークの搬送方向に移動されるメインフレームと、
そのメインフレームの延設方向に移動可能に当該メインフレームに配設される走行部材と、その走行部材に設けられ前記駆動装置に着脱自在に連結される駆動連結部と、その走行部材からワークの搬送方向の前方及び後方へ延設され前記メインフレームの延設方向に直交する前後一対のアーム部材と、その各アーム部材に配設されワークを上方から吸着する前記複数の吸着部とを有している1又は2以上の可動アームユニットと、
その可動アームユニットの前記走行部材を、前記駆動連結部と前記駆動装置との非連結状態で前記メインフレームに対して制止固定する一方、その駆動連結部と前記駆動装置との連結状態で前記メインフレームに対して移動可能に制止解除するブレーキ装置とを備えており、
前記駆動装置から分離した別体に形成されていることを特徴とするワークキャリッジ。 - 前記メインフレームの延設方向へ往復移動する前記駆動装置の移動体に着脱自在に連結される前記駆動連結部であって、その移動体の下方に配設されて前記走行部材の上面部に設けられる前記駆動連結部を備えていることを特徴とする請求項1記載のワークキャリッジ。
- 前記走行部材は、前記メインフレームにおけるワークの搬送方向の前面部に配設され前記前側のアーム部材の基端部が固定される前腕台座と、前記メインフレームにおけるワークの搬送方向の後面部に配設され前記後側のアーム部材の基端部が固定される後腕台座と、その後腕台座及び前腕台座を前記メインフレームの上面部で連設する連設部と、その連設部に設けられる前記駆動連結部とを備えていることを特徴とする請求項1又は2に記載のワークキャリッジ。
- 前記ブレーキ装置は、前記前腕台座に配設され当該前腕台座を前記メインフレームにおけるワークの搬送方向前面部の所定位置に拘束固定する前腕ブレーキと、前記後腕台座に配設され当該後腕台座を前記メインフレームにおけるワークの搬送方向後面部の所定位置に拘束固定する後腕ブレーキとを備えていることを特徴とする請求項3記載のワークキャリッジ。
- 前記メインフレームは、ワークの搬送方向における前面部及び後面部にそれぞれ配設され、当該メインフレームの延設方向に連設されるガイドレールを備えており、
前記前腕台座は、前記メインフレームの前面部に配設される前記ガイドレール上を当該ガイドレールに沿って移動可能に係合されており、
前記後腕台座は、前記メインフレームの後面部に配設される前記ガイドレール上を当該ガイドレールに沿って移動可能に係合されていることを特徴とする請求項3又は4に記載のワークキャリッジ。 - 前記メインフレームにおけるワークの搬送方向の前面部及び後面部に移動不能に固定され、その固定部分からワークの搬送方向の前方及び後方へ延設され前記メインフレームの延設方向に直交する前後一対の固定アーム部材を備えており、
その前後一対の固定アーム部材は、一組、又は、前記メインフレームの延設方向に所定間隔を隔てて2組以上配設されていることを特徴とする請求項1から5のいずれかに記載のワークキャリッジ。 - 前記2以上の可動アームユニットは、そのうち一部の可動アームユニットの可動範囲が前記メインフレームにおける延設方向片側半分の範囲内であり、その残りの可動アームユニットの可動範囲が前記メインフレームにおける延設方向もう片側半分の範囲内であることを特徴とする請求項1から6のいずれかに記載のワークキャリッジ。
- 前記1又は2以上の可動アームユニットに対して配線又は配管されるケーブル又はホースなどの接続線を収容するケーブル類支持案内部材が前記メインフレームにおけるワークの搬送方向の前面部又は後面部のいずれか一方に併設されていることを特徴とする請求項1から7のいずれかに記載のワークキャリッジ。
- 請求項1から8のいずれかに記載のワークキャリッジと、
そのワークキャリッジを移送してワークを加工装置へ搬送する移送装置と、
その移送装置により移送される前記ワークキャリッジにおける1又は2以上の可動アームユニットの位置を移動変更する駆動装置とを備えていることを特徴とするワーク搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015114263A JP6578138B2 (ja) | 2015-06-04 | 2015-06-04 | ワークキャリッジ及びワーク搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015114263A JP6578138B2 (ja) | 2015-06-04 | 2015-06-04 | ワークキャリッジ及びワーク搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017001042A true JP2017001042A (ja) | 2017-01-05 |
| JP6578138B2 JP6578138B2 (ja) | 2019-09-18 |
Family
ID=57753217
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015114263A Active JP6578138B2 (ja) | 2015-06-04 | 2015-06-04 | ワークキャリッジ及びワーク搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6578138B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114535440A (zh) * | 2022-03-17 | 2022-05-27 | 安徽黄山恒久链传动有限公司 | 一种链板加工用加热折弯设备 |
| EP4659915A1 (en) * | 2024-06-07 | 2025-12-10 | Bednar Robotics s.r.o | Equipment for handling sheet materials |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02197333A (ja) * | 1989-01-26 | 1990-08-03 | Komatsu Ltd | トランスファプレスのワーク搬送装置 |
| JPH03122069U (ja) * | 1990-03-26 | 1991-12-12 | ||
| US5737960A (en) * | 1995-11-13 | 1998-04-14 | Schuler Pressen Gmbh & Co. | Press with a combination transfer system |
| JP2004195637A (ja) * | 2002-12-18 | 2004-07-15 | Hyundai Motor Co Ltd | 吸着アタッチメントの高さ調節装置 |
| JP2014184467A (ja) * | 2013-03-22 | 2014-10-02 | Hitachi Zosen Fukui Corp | ワーク搬入装置 |
-
2015
- 2015-06-04 JP JP2015114263A patent/JP6578138B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02197333A (ja) * | 1989-01-26 | 1990-08-03 | Komatsu Ltd | トランスファプレスのワーク搬送装置 |
| JPH03122069U (ja) * | 1990-03-26 | 1991-12-12 | ||
| US5737960A (en) * | 1995-11-13 | 1998-04-14 | Schuler Pressen Gmbh & Co. | Press with a combination transfer system |
| JP2004195637A (ja) * | 2002-12-18 | 2004-07-15 | Hyundai Motor Co Ltd | 吸着アタッチメントの高さ調節装置 |
| JP2014184467A (ja) * | 2013-03-22 | 2014-10-02 | Hitachi Zosen Fukui Corp | ワーク搬入装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114535440A (zh) * | 2022-03-17 | 2022-05-27 | 安徽黄山恒久链传动有限公司 | 一种链板加工用加热折弯设备 |
| EP4659915A1 (en) * | 2024-06-07 | 2025-12-10 | Bednar Robotics s.r.o | Equipment for handling sheet materials |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6578138B2 (ja) | 2019-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108263812B (zh) | 一种上料装置 | |
| JP6578138B2 (ja) | ワークキャリッジ及びワーク搬送装置 | |
| WO2014147937A1 (ja) | ワーク搬入装置 | |
| JP5882473B2 (ja) | ワーク搬送装置及びそれを用いたワーク搬送方法 | |
| CN113911731A (zh) | 一种交替上料装置及叠片设备 | |
| JP6877272B2 (ja) | ロボットハンド及び曲げロボット | |
| JP2010021292A (ja) | 基板昇降移送装置及び基板処理移送システム | |
| CN116654501B (zh) | 货箱取出装置及方法、搬运机器人 | |
| KR101278061B1 (ko) | 이송셔틀이 구비된 프레스 장치 | |
| KR101156558B1 (ko) | 천장주행형 물류반송시스템 | |
| CN219132348U (zh) | 抓取组件及机械臂 | |
| CN210139409U (zh) | 一种同时吸取两个板材的吸盘装置 | |
| JP5320876B2 (ja) | 基板移送システム及び基板移送方法 | |
| JP2718878B2 (ja) | ガラス板の固定方法並びにその装置 | |
| CN214601389U (zh) | 包管和冲压的自动化生产线 | |
| CN217126268U (zh) | 一种收板机 | |
| CN216140899U (zh) | 一种磁力轮输送线 | |
| CN112338058B (zh) | 包管和冲压的自动化生产线 | |
| CN214269332U (zh) | 焊网吸附结构及焊网处理装置 | |
| CN213916933U (zh) | 一种上料装置 | |
| JP6578005B2 (ja) | 部品実装装置 | |
| CN207629974U (zh) | 一种铆装机及篮子加工自动化生产线 | |
| CN215626098U (zh) | 一种金属板材吊运工装 | |
| CN205366876U (zh) | 一种导管自动输送装置 | |
| JP6374963B2 (ja) | 生産機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180525 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190826 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6578138 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |