JP2017001406A - 車速制限装置 - Google Patents
車速制限装置 Download PDFInfo
- Publication number
- JP2017001406A JP2017001406A JP2015113789A JP2015113789A JP2017001406A JP 2017001406 A JP2017001406 A JP 2017001406A JP 2015113789 A JP2015113789 A JP 2015113789A JP 2015113789 A JP2015113789 A JP 2015113789A JP 2017001406 A JP2017001406 A JP 2017001406A
- Authority
- JP
- Japan
- Prior art keywords
- upper limit
- speed
- vehicle speed
- function
- limit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/02—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/02—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism
- B60K31/04—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means
- B60K31/042—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator
- B60K31/045—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator in a memory, e.g. a capacitor
- B60K31/047—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator in a memory, e.g. a capacitor the memory being digital
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/29—Instruments characterised by the way in which information is handled, e.g. showing information on plural displays or prioritising information according to driving conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
- B60R16/0231—Circuits relating to the driving or the functioning of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
- B60R16/0231—Circuits relating to the driving or the functioning of the vehicle
- B60R16/0232—Circuits relating to the driving or the functioning of the vehicle for measuring vehicle parameters and indicating critical, abnormal or dangerous conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K2031/0091—Speed limiters or speed cutters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2310/00—Arrangements, adaptations or methods for cruise controls
- B60K2310/20—Operator actuated switches or levers for cruise control or speed limiting systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2310/00—Arrangements, adaptations or methods for cruise controls
- B60K2310/24—Speed setting methods
- B60K2310/244—Speed setting methods changing target speed or setting a new target speed, e.g. changing algorithms
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
Description
走行路における車両の制限速度を取得し、前記取得した制限速度に基づいて車速の上限である上限車速を設定し、前記車速が前記上限車速を超えないように駆動力を制御する車速制限装置(10,20,30)において、
前記上限車速をドライバーの操作によって所望の値に変更する操作器である上限車速変更操作器(50)と、
前記取得される制限速度が切り替わったタイミングで、一時的に、前記上限車速変更操作器の機能を、前記上限車速をドライバーの操作によって所望の値に変更する第1機能から、前記制限速度の変更を受け付けるか否かについてドライバーの操作によって回答する第2機能に切り替える機能切替手段(S13,S14,S31,S37)と、
前記上限車速変更操作器が前記第1機能にて作動した場合、その作動後、予め設定された禁止解除タイミングが到来するまでは、前記取得される制限速度が切り替わったとしても、前記上限車速変更操作器の機能が前記第2機能に切り替わることを禁止する機能切替禁止手段(S11,S12,S21,S25,S25’,S26)とを備えたことにある。
前記予め設定された禁止解除タイミングは、前記上限車速変更操作器が前記第1機能にて作動してからの経過時間が予め設定した設定時間(ta0)に達した時であることにある。
前記予め設定された禁止解除タイミングは、前記上限車速変更操作器が前記第1機能にて作動してからの車両の走行距離が予め設定した設定距離(d0)に達した時であることにある。
前記予め設定された禁止解除タイミングは、前記上限車速変更操作器が前記第1機能にて作動してからの経過時間が予め設定した設定時間に達した時、および、前記上限車速変更操作器が前記第1機能にて作動してからの車両の走行距離が予め設定した設定距離に達した時の、何れか早く到来する時であることにある。
前記上限車速変更操作器の機能が第1機能にて作動する期間中は、現時点の上限速度を表す第1表示画面(D1)を表示し、前記上限車速変更操作器の機能が第2機能にて作動する期間中は、前記上限速度の表示に加えて、前記切り替わった新しい制限速度および前記制限速度の変更を受け付けるか否かについての回答操作方法を表す第2表示画面(D2)を表示する表示手段(40,41)を備えたことにある。
前記表示手段は、前記第2表示画面において表示する回答操作方法については、前記制限速度の変更を受け付ける場合の操作方法のみを表示し、
前記上限車速変更操作器の機能が前記第2機能にて作動する期間中に、前記上限車速変更操作器が操作されなかった場合(S36)には、ドライバーが前記制限速度の変更の受付を拒否したものとみなす自動回答受領手段(20)を備えたことにある。
前記上限車速変更操作器が前記第2機能にて作動したタイミングで、前記上限車速変更操作器の機能を、前記第2機能から前記第1機能に戻す機能復帰手段を備えたことにある。
上述した実施形態においては、上限速度設定ECU20は、通常モードでASL操作器50が作動してからの経過時間に基づいて、その経過時間が切替禁止設定時間ta0(禁止解除タイミング)に到達したタイミング(S25:Yes)で、禁止フラグFaを「0」に設定して、問い合わせモードへの切替を許可している。一方、この変形例1では、経過時間に基づいてモード切替禁止期間を設定する構成に代えて、通常モードでASL操作器50が作動してからの車両の走行距離に基づいて、その走行距離が切替禁止設定距離に到達したタイミングで、禁止フラグFaを「0」に設定して、問い合わせモードへの切替を許可する。
また、モード切換禁止期間の設定に係る他の変形例(変形例2)として、モード切替禁止期間を、実施形態の切替禁止設定時間ta0と、上記変形例1の設定距離d0とを組み合わせて設定することもできる。例えば、上限速度設定ECU20は、実施形態のようにタイマ値taが切替禁止設定時間ta0に到達するタイミング(タイミング1と呼ぶ)と、変形例1のように走行距離dが設定距離d0に到達するタイミング(タイミング2と呼ぶ)とを取得し、この2つのタイミング1,2において早く到来するほうのタイミングにて、モード切換禁止期間を解除する構成であってもよい。これによれば、通常モードから問い合わせモードに切り替わるタイミングを、遅れないように一層適切にすることができる。
上述した実施形態においては、上限速度設定ECU20は、ASL操作器50の上下方向における一方のレバー操作を許諾操作として認識し、他方のレバー操作を拒否操作として認識するが、これに代えて、上下方向の一方のレバー操作のみ(例えば、下方向のレバー操作のみ)を許諾操作として認識する構成(つまり、他方のレバー操作については拒否操作として認識しない構成)であってもよい。この場合、拒否操作については、問い合わせ制限時間tb0が経過した時点で拒否回答がなされたものとみなされるため、不要となる。従って、ドライバーの操作負担を減らすことができ、使い勝手が良い。
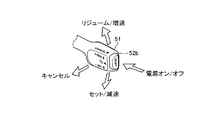
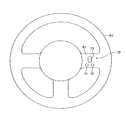
上述した実施例では、ASL操作器50は、レバー操作式の操作器であるが、操作形式は、レバー操作式に限るものではなく、例えば、ボタン操作式であってもよい。例えば、図9に示すように、ステアリングハンドル60の非グリップ部61にASL操作器70を設けた構成であってもよい。この例では、ASL操作器70は、メインボタン71、キャンセルボタン72、セレクターボタン73を備え、セレクターボタン73を上下方向(ステアリングハンドル60の右回り方向と左回り方向)に選択的に押圧あるいはスライドすることで、実施形態のリジューム/増速スイッチ53、セット/減速スイッチ54と同じ作動を実現させるように構成されている。
例えば、自車両の走行車速を一定に保つクルーズコントロール装置を備えた車両においては、目標車速を設定する設定操作器を、本実施形態のASL操作器50に兼用することもできる。この場合、クルーズコントロール装置をアクティブにするか、車速制限装置をアクティブにするかについて、択一的に選択する選択スイッチを、例えば、ステアリングハンドルの非グリップ部など、ドライバーの操作しやすい位置に設けるとよい。これによって、ドライバーは、どちらの機能を用いるかを選択することができる。クルーズコントロールの目標車速は、実施形態のASL操作器50の操作と同様に上下方向の操作にて増減調整することができる。
Claims (7)
- 走行路における車両の制限速度を取得し、前記取得した制限速度に基づいて車速の上限である上限車速を設定し、前記車速が前記上限車速を超えないように駆動力を制御する車速制限装置において、
前記上限車速をドライバーの操作によって所望の値に変更する操作器である上限車速変更操作器と、
前記取得される制限速度が切り替わったタイミングで、一時的に、前記上限車速変更操作器の機能を、前記上限車速をドライバーの操作によって所望の値に変更する第1機能から、前記制限速度の変更を受け付けるか否かについてドライバーの操作によって回答する第2機能に切り替える機能切替手段と、
前記上限車速変更操作器が前記第1機能にて作動した場合、その作動後、予め設定された禁止解除タイミングが到来するまでは、前記取得される制限速度が切り替わったとしても、前記上限車速変更操作器の機能が前記第2機能に切り替わることを禁止する機能切替禁止手段と
を備えた車速制限装置。 - 請求項1記載の車速制限装置において、
前記予め設定された禁止解除タイミングは、前記上限車速変更操作器が前記第1機能にて作動してからの経過時間が予め設定した設定時間に達した時である、車速制限装置。 - 請求項1記載の車速制限装置において、
前記予め設定された禁止解除タイミングは、前記上限車速変更操作器が前記第1機能にて作動してからの車両の走行距離が予め設定した設定距離に達した時である、車速制限装置。 - 請求項1記載の車速制限装置において、
前記予め設定された禁止解除タイミングは、前記上限車速変更操作器が前記第1機能にて作動してからの経過時間が予め設定した設定時間に達した時、および、前記上限車速変更操作器が前記第1機能にて作動してからの車両の走行距離が予め設定した設定距離に達した時の、何れか早く到来する時である、車速制限装置。 - 請求項1ないし請求項4の何れか一項記載の車速制限装置において、
前記上限車速変更操作器の機能が第1機能にて作動する期間中は、現時点の上限速度を表す第1表示画面を表示し、前記上限車速変更操作器の機能が第2機能にて作動する期間中は、前記上限速度の表示に加えて、前記切り替わった新しい制限速度および前記制限速度の変更を受け付けるか否かについての回答操作方法を表す第2表示画面を表示する表示手段を備えた車速制限装置。 - 請求項5記載の車速制限装置において、
前記表示手段は、前記第2表示画面において表示する回答操作方法については、前記制限速度の変更を受け付ける場合の操作方法のみを表示し、
前記上限車速変更操作器の機能が前記第2機能にて作動する期間中に、前記上限車速変更操作器が操作されなかった場合には、ドライバーが前記制限速度の変更の受付を拒否したものとみなす自動回答受領手段を備えた車速制限装置。 - 請求項1ないし請求項6の何れか一項記載の車速制限装置において、
前記上限車速変更操作器が前記第2機能にて作動したタイミングで、前記上限車速変更操作器の機能を、前記第2機能から前記第1機能に戻す機能復帰手段を備えた車速制限装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015113789A JP6337840B2 (ja) | 2015-06-04 | 2015-06-04 | 車速制限装置 |
| CN201610390588.5A CN106240365B (zh) | 2015-06-04 | 2016-06-03 | 车速限制装置 |
| DE102016110298.9A DE102016110298A1 (de) | 2015-06-04 | 2016-06-03 | Fahrzeuggeschwindigkeitsbegrenzungsvorrichtung |
| US15/174,335 US9956877B2 (en) | 2015-06-04 | 2016-06-06 | Vehicle speed limiting device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015113789A JP6337840B2 (ja) | 2015-06-04 | 2015-06-04 | 車速制限装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017001406A true JP2017001406A (ja) | 2017-01-05 |
| JP6337840B2 JP6337840B2 (ja) | 2018-06-06 |
Family
ID=57352504
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015113789A Active JP6337840B2 (ja) | 2015-06-04 | 2015-06-04 | 車速制限装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9956877B2 (ja) |
| JP (1) | JP6337840B2 (ja) |
| CN (1) | CN106240365B (ja) |
| DE (1) | DE102016110298A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018154217A (ja) * | 2017-03-17 | 2018-10-04 | マツダ株式会社 | 運転支援制御装置 |
| JP2019059356A (ja) * | 2017-09-27 | 2019-04-18 | マツダ株式会社 | 車両制御装置 |
| JP2019059359A (ja) * | 2017-09-27 | 2019-04-18 | マツダ株式会社 | 車両制御装置 |
| JP2019059358A (ja) * | 2017-09-27 | 2019-04-18 | マツダ株式会社 | 車両制御装置 |
| DE102022124621A1 (de) | 2021-09-27 | 2023-03-30 | Toyota Jidosha Kabushiki Kaisha | Fahrzeuggeschwindigkeitsbegrenzer, Fahrzeuggeschwindigkeitsbegrenzungsverfahren und Fahrzeug |
| JP2023183585A (ja) * | 2022-06-16 | 2023-12-28 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015213181B3 (de) | 2015-07-14 | 2017-01-19 | Bayerische Motoren Werke Aktiengesellschaft | Längsführendes Fahrerassistenzsystem in einem Kraftfahrzeug |
| DE102015213183A1 (de) * | 2015-07-14 | 2017-01-19 | Bayerische Motoren Werke Aktiengesellschaft | Längsführendes Fahrerassistenzsystem in einem Kraftfahrzeug |
| DE102015213190B3 (de) | 2015-07-14 | 2016-09-29 | Bayerische Motoren Werke Aktiengesellschaft | Längsführendes Fahrerassistenzsystem in einem Kraftfahrzeug |
| US10701859B2 (en) | 2016-01-07 | 2020-07-07 | Exmark Manufacturing Company, Incorporated | Electronic controller and turf maintenance vehicle incorporating same |
| US20190367029A1 (en) * | 2018-05-30 | 2019-12-05 | International Business Machines Corporation | Dynamic speed controller for vehicle |
| CN108638861A (zh) * | 2018-06-30 | 2018-10-12 | 如皋市招财牛车业有限公司 | 电动车道路限速控制系统 |
| CN111483316B (zh) * | 2019-01-29 | 2022-07-19 | 宇通客车股份有限公司 | 一种车辆及其限速控制方法和装置 |
| CN113752827B (zh) * | 2020-06-05 | 2024-03-01 | 北京京东乾石科技有限公司 | 一种无人车速度控制方法、装置、无人车及存储介质 |
| CN111731298B (zh) * | 2020-06-30 | 2022-06-03 | 重庆长安汽车股份有限公司 | 一种新能源汽车的车速限速控制方法、装置及新能源汽车 |
| CN112339754A (zh) * | 2020-10-23 | 2021-02-09 | 上汽通用五菱汽车股份有限公司 | 车速调整方法、车辆及可读存储介质 |
| JP7517221B2 (ja) * | 2021-03-25 | 2024-07-17 | トヨタ自動車株式会社 | 自動速度制御装置、自動速度制御方法及び自動速度制御プログラム |
| DE102021111546A1 (de) | 2021-05-04 | 2022-11-10 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Betreiben eines Fahrerassistenzsystems zur Längsregelung eines Fahrzeugs mit proaktivem Vorschlag zur Funktionsnutzung, Fahrerassistenzsystem sowie Fahrzeug |
| CN116118495A (zh) * | 2022-11-30 | 2023-05-16 | 东风商用车有限公司 | 车速限制控制方法、装置、设备及可读存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008265706A (ja) * | 2007-04-25 | 2008-11-06 | Nissan Motor Co Ltd | 車両用走行制御装置および車両用走行制御方法 |
| US20100217494A1 (en) * | 2009-02-20 | 2010-08-26 | Nissan Technical Center North America, Inc. | Adaptive speed control device |
| JP2012206594A (ja) * | 2011-03-29 | 2012-10-25 | Fuji Heavy Ind Ltd | 車両用運転支援装置 |
| JP2013203379A (ja) * | 2012-03-29 | 2013-10-07 | Toyota Motor Corp | 走行制御装置、走行制御方法、プログラム及び媒体 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101554836B (zh) * | 2009-05-19 | 2011-06-29 | 浙江大学 | 限速感应及车速控制装置 |
| JP2012240605A (ja) | 2011-05-23 | 2012-12-10 | Denso Corp | 車速制限制御装置 |
| CN202753790U (zh) * | 2012-08-23 | 2013-02-27 | 金龙联合汽车工业(苏州)有限公司 | 通过限制发动机转速限制车速的装置 |
-
2015
- 2015-06-04 JP JP2015113789A patent/JP6337840B2/ja active Active
-
2016
- 2016-06-03 CN CN201610390588.5A patent/CN106240365B/zh active Active
- 2016-06-03 DE DE102016110298.9A patent/DE102016110298A1/de active Pending
- 2016-06-06 US US15/174,335 patent/US9956877B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008265706A (ja) * | 2007-04-25 | 2008-11-06 | Nissan Motor Co Ltd | 車両用走行制御装置および車両用走行制御方法 |
| US20100217494A1 (en) * | 2009-02-20 | 2010-08-26 | Nissan Technical Center North America, Inc. | Adaptive speed control device |
| JP2012206594A (ja) * | 2011-03-29 | 2012-10-25 | Fuji Heavy Ind Ltd | 車両用運転支援装置 |
| JP2013203379A (ja) * | 2012-03-29 | 2013-10-07 | Toyota Motor Corp | 走行制御装置、走行制御方法、プログラム及び媒体 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018154217A (ja) * | 2017-03-17 | 2018-10-04 | マツダ株式会社 | 運転支援制御装置 |
| JP2019059356A (ja) * | 2017-09-27 | 2019-04-18 | マツダ株式会社 | 車両制御装置 |
| JP2019059359A (ja) * | 2017-09-27 | 2019-04-18 | マツダ株式会社 | 車両制御装置 |
| JP2019059358A (ja) * | 2017-09-27 | 2019-04-18 | マツダ株式会社 | 車両制御装置 |
| DE102022124621A1 (de) | 2021-09-27 | 2023-03-30 | Toyota Jidosha Kabushiki Kaisha | Fahrzeuggeschwindigkeitsbegrenzer, Fahrzeuggeschwindigkeitsbegrenzungsverfahren und Fahrzeug |
| US12103386B2 (en) | 2021-09-27 | 2024-10-01 | Toyota Jidosha Kabushiki Kaisha | Vehicle speed limiter, vehicle speed limiting method and vehicle |
| JP2023183585A (ja) * | 2022-06-16 | 2023-12-28 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7470739B2 (ja) | 2022-06-16 | 2024-04-18 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US9956877B2 (en) | 2018-05-01 |
| CN106240365B (zh) | 2019-08-06 |
| CN106240365A (zh) | 2016-12-21 |
| US20160355183A1 (en) | 2016-12-08 |
| JP6337840B2 (ja) | 2018-06-06 |
| DE102016110298A1 (de) | 2016-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6337840B2 (ja) | 車速制限装置 | |
| EP3299239B1 (en) | Vehicle traveling control apparatus | |
| US11292448B2 (en) | Longitudinal driver assistance system in a motor vehicle | |
| JP6520877B2 (ja) | 車両走行制御装置 | |
| CN110608287B (zh) | 车辆的控制装置 | |
| US10272926B2 (en) | Vehicle traveling control apparatus | |
| CN109823343B (zh) | 车辆的控制装置 | |
| CN110001616B (zh) | 车辆的控制装置 | |
| US10214209B2 (en) | Driver assistance system in a motor vehicle | |
| US11260865B2 (en) | Vehicle control device | |
| JP2019119327A (ja) | 車両の制御装置 | |
| JP2009280015A (ja) | 操舵制御装置 | |
| US20220258736A1 (en) | Driver assistance system for a motor vehicle, and motor vehicle | |
| US11383708B2 (en) | Vehicle travel control apparatus | |
| CN107810132A (zh) | 机动车中的纵向引导的驾驶员辅助系统 | |
| CN107531247B (zh) | 机动车中的纵向引导的驾驶员辅助系统 | |
| JP2009197673A (ja) | 車両用走行制御装置 | |
| US12103386B2 (en) | Vehicle speed limiter, vehicle speed limiting method and vehicle | |
| JP2006036159A (ja) | 車両の走行制御装置 | |
| US20250050887A1 (en) | Reverse support apparatus | |
| JP7622900B2 (ja) | 運転支援方法及び運転支援装置 | |
| JP2021085375A (ja) | 車両制御システム、および、車両制御装置 | |
| US20250388240A1 (en) | Vehicle control device and vehicle control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170728 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170920 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180410 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180423 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6337840 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |