JP2017007633A - ステアリング装置、及び車両の走行モードの切り替え方法 - Google Patents
ステアリング装置、及び車両の走行モードの切り替え方法 Download PDFInfo
- Publication number
- JP2017007633A JP2017007633A JP2015145034A JP2015145034A JP2017007633A JP 2017007633 A JP2017007633 A JP 2017007633A JP 2015145034 A JP2015145034 A JP 2015145034A JP 2015145034 A JP2015145034 A JP 2015145034A JP 2017007633 A JP2017007633 A JP 2017007633A
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- knuckle
- vehicle
- steering
- kingpin
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 29
- 230000007246 mechanism Effects 0.000 claims abstract description 65
- 239000000725 suspension Substances 0.000 claims abstract description 17
- 239000003638 chemical reducing agent Substances 0.000 claims description 4
- 238000011065 in-situ storage Methods 0.000 description 10
- 230000002093 peripheral effect Effects 0.000 description 8
- 230000007935 neutral effect Effects 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000004043 responsiveness Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images











Landscapes
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
Abstract
【課題】簡便な装置構成で、通常走行モードから特殊走行モードへの切り替えを行うこと。【解決手段】懸架装置11を介してシャーシに設けられたナックル12と、懸架装置11に対し、ナックル12を転舵方向に回動する第一のキングピン軸13と、ナックル12に対し、車輪wを車両Cの各走行モードに対応する角度に回動する第二のキングピン軸14と、第一のキングピン軸13周りに車輪wを左右同方向に転舵可能な転舵装置15と、第二のキングピン軸14周りの車輪wの回動を、前記各走行モードに対応する位置でロック可能なロック機構16と、を備えたステアリング装置を構成する。【選択図】図1
Description
この発明は、通常走行モードとその場回転等の特殊走行モードとの間で走行モードを切り替え可能としたステアリング装置、及び、車両の走行モードの切り替え方法に関する。
左右の車輪(以下、タイヤ、ホイール、ハブ、インホイールモータ等を含めて総合的に「車輪」と称する。)を結ぶステアリングリンク機構を用いて車輪を転舵するものに、アッカーマン・ジャントウ式と呼ばれるステアリング装置がある。このステアリング装置は、タイロッドとナックルアームを有し、車両の回転時に、左右の車輪が同一回転中心をもつように作用する。
このステアリング装置として、例えば、特許文献1に示す構成のものがある。このステアリング装置は、タイロッドとナックルアームを用いる左右車輪のステアリングリンク機構を前輪側または後輪側の少なくとも一方に備え、タイロッド長さ、左右のタイロッド間距離、又は各車輪とナックルアームのなす角度のいずれかを変化させるアクチュエータを設けることで、通常走行、平行移動、小回りのすべての走行をスムーズに行うとともに、優れた応答性を確保している。
特許文献2に示すステアリング装置は、前後輪の左右車輪間に配置され、軸心周りに回転可能なステアリングシャフトと、このステアリングシャフトを左右2分割した間に、分割されたステアリングシャフトの回転方向を正逆方向で切り替える正逆切り替え手段を備えている。この切り替え手段によって、舵角90度、横方向移動等を可能としている。
特許文献3には、前輪の転舵に応じてアクチュエータが作動して、後輪を転舵するようにした4輪転舵車両の技術について示されている。また、特許文献4には、左右車輪間を結ぶラックハウジングを前後方向に移動させることで、左右車輪のトー調整を行い、走行安定性を高めたステアリング装置の技術について示されている。
一般的なアッカーマン・ジャントウ式のステアリングリンク機構によれば、通常走行時には、各車輪の回転ライン(車輪の幅方向中心線)から平面視垂直に延びた線が、車両の回転中心に集まるので、スムーズな走行ができる。しかし、車両の横方向移動(車両が前後方向を向いた状態での横方向への平行移動)を求める場合、車輪を前後方向に対して90度の方向に操舵することは、ステアリングリンクの長さや他部材との干渉から困難である。また、仮に、左右の車輪のうち一方の車輪を90度に操舵した場合でも、他方の車輪は一方の車輪と完全に平行にはならず、スムーズな走行が困難である。
また、この種の車両では、通常、主転舵車輪である前輪を車両の所定の進行方向に転舵し、従転舵車輪である後輪は、車両の前後方向と平行を保つように設計されている。このため、この車両の前輪を転舵し回転させたときに、前輪と後輪の回転中心が同一位置とならない。このため、低車速時には内輪差により後輪が回転円の内側に入る姿勢で車両が回転し、高車速時には遠心力により前輪が回転円の内側に入る姿勢で車両が回転することになる。すなわち、前輪を車両の進行方向である回転方向に転舵しても、車両の姿勢を回転方向に一致させ操向することができないという問題がある。そこで、前輪のみならず後輪をも転舵することにより、走行性を向上させる4輪ステアリング装置を有する車両がある。
4輪ステアリング装置を有する車両(所謂4WS車)として、例えば、特許文献1に記載の技術では、車両の横方向移動、小回り等が可能である。しかし、タイロッドの長さ、左右タイロッド間の距離、あるいは、車輪とナックルアームのなす角を変化させるために多くのアクチュエータを備え、各アクチュエータの複雑な制御が必要となる。また、特許文献2に記載の技術は、その機構上、構造が複雑であって、ラックバーの回転で車輪を転舵するために、多数の歯車を使用している。このため、各歯車間にガタが発生しやすく、円滑に車輪の転舵をすることが困難である。
また、特許文献3の技術は、従来の4輪ステアリング装置の一例であって後輪転舵を可能としているが、この機構だけでは横方向移動は困難である。さらに、特許文献4の技術は、トー調整が可能である反面、車両の横方向移動、小回り等には対応できないという問題がある。
特許文献1から4に記載のステアリング装置の諸問題を解決すべく、本願の発明者は、特許文献5に示すように、左右反対方向に移動可能な2つのラックバーを持ち、前記ラックバーのそれぞれを左右いずれかの車輪にタイロッドを介して接続し、同期ギアボックスに保持される同期ギアにより、同期ギアボックスに対して、前記ラックバーを反対方向に移動可能としたステアリング装置を発明した。この2つのラックバーには、このラックバーに噛み合うピニオンギアがそれぞれ設けられ、両ピニオンギアの間には、両ピニオンギアの回転軸を結合又は分離可能とする連結機構が設けられている。この連結機構を結合すると、両ラックバーを一体として同方向に同距離移動する、すなわち、左右の車輪を同方向に転舵することができる。その一方で、この連結機構を分離すると、両ラックバーを反対方向に同距離移動する、すなわち、左右の車輪を逆方向に転舵することができる。
ここで、左右の車輪を同方向に転舵することは、一般の車両における通常の転舵に相当する。また、左右の車輪を逆方向に転舵することは、通常走行モードからその場回転、横方向移動等の特殊走行モードへの走行モードの切り替えに相当する。この通常の転舵、及び走行モードの切り替えは、いずれもタイロッドを介して、各車輪に設けられたナックルの一本のキングピン軸周りの回動として車輪側に伝達される。このステアリング装置を車両に搭載すれば、その場回転や横方向移動等の特殊走行モードを行うことができるとともに、通常走行モードから特殊走行モードへの変更もスムーズに行うことができる。
特許文献5に係るステアリング装置は、左右の車輪を左右同方向及び逆方向のいずれの方向にも転舵可能としたものであって、複雑なギア機構を備えている。このため、ステアリング装置が大重量となるとともに製造コストが増大する等の、解決すべき幾つかの問題を抱えていた。
そこで、この発明は、簡便な装置構成で、通常走行モードから特殊走行モードへの切り替えを行うことを課題とする。
この課題を解決するために、この発明においては、懸架装置を介してシャーシに設けられたナックルと、前記懸架装置に対し、前記ナックルを転舵方向に回動する第一のキングピン軸と、前記ナックルに対し、車輪を車両の各走行モードに対応する角度に回動する第二のキングピン軸と、前記第一のキングピン軸周りに前記車輪を左右同方向に転舵可能な転舵装置と、前記第二のキングピン軸周りの前記車輪の回動を、前記各走行モードに対応する位置でロック可能なロック機構と、を備えたステアリング装置を構成した。
このように、キングピン軸を第一のキングピン軸と第二のキングピン軸に分けて構成することにより、第一のキングピン軸を通常の転舵に関与させる一方で、第二のキングピン軸を走行モードの切り替えに関与させることができる。この場合、ステアリング装置のタイロッドを第一のキングピン軸側に連結して、ステアリング装置に通常の転舵のみを担わせればよいので、このステアリング装置の転舵装置として、一般的に用いられる構成が簡便なラックアンドピニオン式のものを採用することができる。このため、ステアリング装置の重量低減や製造コスト削減を図ることができるとともに、車両への搭載性も向上することができる。なお、第一のキングピン軸及び第二のキングピン軸は、実際に軸体を備えた構成、又は実際に軸体を有さず所定の回転軸周りに回動する構成のいずれの構成であってもよい。
また、ロック機構を設け、第二のキングピン軸周りの回転をロック状態とした上で、ステアリング操作を行うことにより、各走行モードにおける左右の車輪の転舵角の調節を行うことができる。さらに、第二のキングピン軸周りの回転をロック解除状態とした上でステアリング操作を行うことにより、車輪を路面との間の摩擦によって転舵できない状態としたままナックルを第二のキングピン軸周りに回転して、走行モードの切り替えを行うことができる。
前記構成においては、前記第二のキングピン軸周りに前記車輪を転舵させる駆動源を前後の前記車輪の少なくとも一方にさらに備えた構成とするのが好ましい。このように、駆動源を設けることにより、走行モードの切り替えに駆動源による駆動力を併用することができ、一層スムーズに走行モードの切り替えを行うことができる。
前記各構成においては、前記第二のキングピン軸のスクラブ半径が、前記第一のキングピン軸のスクラブ半径よりも大きくなるように、前記第一のキングピン軸及び前記第二のキングピン軸を配置した構成とするのが好ましい。
スクラブ半径は、キングピン軸が地面と交わる点と、タイヤの接地面中心との間の距離であり、キングピン軸の位置や傾きとともに、このスクラブ半径の大きさが車両の走行特性や転舵特性に大きな影響を与える。具体的には、スクラブ半径を大きくすると、走行モードの切り替え特性は向上する一方で、車両の走行特性が悪化することがある。上記のように、キングピン軸を第一のキングピン軸と第二のキングピン軸で別々に構成し、第一のキングピン軸を車輪の転舵操作用、第二のキングピン軸を走行モードの切り替え用としてそれぞれ機能させることにより、走行特性の確保と、走行モードの切り替え特性の確保の両立を図ることができる。
前記各構成においては、前記駆動源が、前記車輪に設けられたインホイールモータ、油圧シリンダ、空圧シリンダ、電動シリンダ、又は、モータと減速機の組み合わせのいずれかとすることができる。
また、この発明においては、懸架装置を介してシャーシに設けられたナックルに、前記懸架装置に対し、前記ナックルを転舵方向に回動させる第一のキングピン軸と、前記ナックルに対し、車輪を車両の走行モードに対応する方向に回動させる第二のキングピン軸を設けるとともに、前記第二のキングピン軸周りの前記車輪の回動を、前記車両が採り得る各走行モードに対応する位置でロック可能なロック機構を設け、前記ロック機構をロック状態とした上で、前記ナックルに連結された左右の前記車輪を左右同方向に転舵可能な転舵装置を駆動し、前記ナックルを前記第一のキングピン軸周りに回動して車輪を転舵する車輪転舵ステップと、前記ロック機構をロック解除状態とした上で、前記ナックルに連結された前記転舵装置を駆動し、前記車輪と路面との間の摩擦によってこの車輪の転舵を防止しつつ、前記ナックルを前記第一のキングピン軸周り及び前記第二のキングピン軸周りに回動して走行モードを切り替える、第一走行モード切替ステップと、を交互に又はいずれか一方を行うことにより車両の走行モードを切り替える車両の走行モードの切り替え方法を構成した。
この走行モードの切り替え方法によると、左右の車輪を左右同方向に転舵する一般的な転舵装置を用いて、車両の走行モードを通常走行モードから横方向移動モード等の特殊走行モードに容易に切り替えることができ、上述したように、ステアリング装置の重量低減や製造コスト削減を図ることができるとともに、車両への搭載性も向上することができる。
前記ロック機構をロック解除状態とした上で、前記転舵装置を固定状態とし、前記車輪を駆動源で駆動することによって、前記ナックルを前記第二のキングピン軸周りに回動して、走行モードを切り替える、第二走行モード切替ステップをさらに備えた構成とするのが好ましい。このように、走行モードの切り替えに駆動源による駆動力を併用することにより、走行モードの切り替えを一層スムーズに行うことができる。
前記切り替え方法においても、前記駆動源が、前記車輪に設けられたインホイールモータ、油圧シリンダ、空圧シリンダ、電動シリンダ、又は、モータと減速機の組み合わせのいずれかとすることができる。
この発明においては、懸架装置を介してシャーシに設けられたナックルと、前記懸架装置に対し、前記ナックルを転舵方向に回動する第一のキングピン軸と、前記ナックルに対し、車輪を車両の各走行モードに対応する角度に回動する第二のキングピン軸と、前記第一のキングピン軸周りに前記車輪を左右同方向に転舵可能な転舵装置と、前記第二のキングピン軸周りの前記車輪の回動を、前記各走行モードに対応する位置でロック可能なロック機構と、を備えたステアリング装置を構成した。
このように、キングピン軸を第一のキングピン軸と第二のキングピン軸に分けて構成することにより、第一のキングピン軸を通常の転舵に関与させる一方で、第二のキングピン軸を走行モードの切り替えに関与させることができる。この場合、ステアリング装置のタイロッドを第一のキングピン軸側に連結して、ステアリング装置に通常の転舵のみを担わせればよいので、このステアリング装置の転舵装置として、構成が簡便であって一般的に用いられるラックアンドピニオン式のものを採用することができる。このため、その構成を簡便化して、装置重量や製造コストの増大等の問題を回避できるとともに、車両への搭載性も向上することができる。
さらに、ロック機構を設け、第二のキングピン軸周りの回転をロック状態とした上でステアリング操作を行うことにより、各走行モードにおける左右の車輪の転舵角の調節を行うことができる。また、第二のキングピン軸周りの回転をロック解除状態とした上でステアリング操作を行うことにより、車輪を路面との間の摩擦によって転舵できない状態としたままナックルを第二のキングピン軸周りに回転して、走行モードの切り替えを行うことができる。
この発明に係るステアリング装置の構成、このステアリング装置を搭載した車両C(図4参照)の走行モードの切り替え方法、及びこの車両Cの各走行モードについて順に説明する。
(1)ステアリング装置の構成について
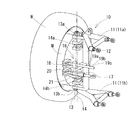
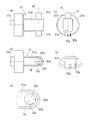
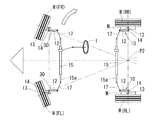
この発明に係るステアリング装置の第一実施形態を図1及び図2に、第二実施形態を図3に示す。図1(a)は正面図、(b)は側面図、図2は斜視図、図3(a)は正面図、(b)は平面図、(c)は側面図、(d)は斜視図である。第一実施形態に係るステアリング装置10は、車輪w内に駆動源(本実施形態ではインホイールモータM)を備えた駆動輪側に採用され、第二実施形態に係るステアリング装置30は、駆動源を備えていない従動輪側に採用される。以下においては、第一実施形態に係るステアリング装置10を駆動輪用ステアリング装置(以下において、符号10を付する)と、第二実施形態に係るステアリング装置30を従動輪用ステアリング装置(以下において、符号30を付する)とそれぞれ称する。
この発明に係るステアリング装置の第一実施形態を図1及び図2に、第二実施形態を図3に示す。図1(a)は正面図、(b)は側面図、図2は斜視図、図3(a)は正面図、(b)は平面図、(c)は側面図、(d)は斜視図である。第一実施形態に係るステアリング装置10は、車輪w内に駆動源(本実施形態ではインホイールモータM)を備えた駆動輪側に採用され、第二実施形態に係るステアリング装置30は、駆動源を備えていない従動輪側に採用される。以下においては、第一実施形態に係るステアリング装置10を駆動輪用ステアリング装置(以下において、符号10を付する)と、第二実施形態に係るステアリング装置30を従動輪用ステアリング装置(以下において、符号30を付する)とそれぞれ称する。
これらのステアリング装置10、30は、例えば、図4に示す車両Cに採用される。この車両Cは、2人乗車(横並び二人乗り)の超小型モビリティである。なお、この発明に係るステアリング装置10、30の用途は、この超小型モビリティに限定されるものではなく、通常の車両にも適用することができる。この車両Cの後輪RR、RLはインホイールモータMが設けられた駆動輪であり、前輪FR、FLはインホイールモータMが設けられていない従動輪である。
すなわち、図5に示すように、後輪RR、RL側には駆動輪用ステアリング装置10が設けられ、前輪FR、FL側には従動輪用ステアリング装置30が設けられている。駆動輪用ステアリング装置10は、運転者の走行モードの切り替え等の操作に基づいて転舵を行うステアバイワイヤ方式が採用される一方で、従動輪用ステアリング装置30は、運転者のステアリング1の操作に基づいて転舵を行う、通常のラックアンドピニオン方式が採用されている。
駆動輪用ステアリング装置10は、図1及び図2に示すように、懸架装置11(アッパーアーム11a、ロワアーム11b)を介して、例えば、図4に示す車両Cのシャーシ(図示せず)に設けられたナックル12と、懸架装置11に対し、ナックル12を転舵方向に回動させる第一のキングピン軸13と、ナックル12に対し、車輪wを車両Cの各走行モードに対応する方向に回動させる第二のキングピン軸14と、第一のキングピン軸13周りに車輪wを左右同方向に転舵可能な転舵装置15(図5参照)と、第二のキングピン軸14周りの車輪wの回動を、前記各走行モードに対応する位置でロック可能なロック機構16と、をその基本構成とする。なお、車両Cの各種走行モードに対応する車輪wの転舵方向については、項目(3)で詳しく説明する。
ナックル12は、このナックル12の上下端部に回動軸13a、13bを有する第一のキングピン軸13の周りに回動可能にタイロッド17に接続されている。このタイロッド17は、車輪wを転舵する転舵装置15(図5等参照)に接続されている。転舵装置15を駆動してタイロッド17を移動させることにより、ナックル12を第一のキングピン軸13周りに回動して、車輪wを転舵することができる。なお、ナックル12のタイロッド17との接続部分の形状は、このナックル12を取り付ける車輪wが駆動輪又は従動輪のいずれか、あるいは、周辺部材と干渉しないかどうか等を考慮した上で、適宜決定することができる。
この転舵装置15として、図5に示すように、例えば、運転者のステアリング操作によって、左右の車輪wとタイロッド17を介して接続されたラック15aを左右に移動させて、この左右の車輪wを左右同方向に転舵するラックアンドピニオン方式のものを採用することができる。また、この転舵装置15として、ステアリング1と転舵装置15が機械的に直接連結された方式、又は、ステアリング1と転舵装置15が直接連結されておらず、ステアリング操作に基づいてアクチュエータ等の駆動力で、転舵装置15のラック15a等を駆動するステアバイワイヤ方式のいずれの方式のものも採用することができる。この駆動輪用ステアリング装置10が後輪RR、RL側に設けられているときは、転舵装置15はアクチュエータ(図示せず)の駆動力によって駆動される。
駆動輪用ステアリング装置10を設ける車輪wには、インホイールモータMが組み込まれている。このインホイールモータMを駆動することにより、車輪wを回転させて車両Cを走行させることができるとともに、項目(2)で詳しく説明するように、従動輪側に設けた従動輪用ステアリング装置30の走行モードの切り替えをアシストすることができる。
第二のキングピン軸14は、第一のキングピン軸13よりもナックル12の中央寄りに回動軸14a、14bを有しており、この第二のキングピン軸14に、車輪wが回動可能に設けられている。各キングピン軸13、14が地面に交わる点と、タイヤの接地面中心との間の距離(以下、スクラブ半径という。)は、第二のキングピン軸14のスクラブ半径r2の方が、第一のキングピン軸13のスクラブ半径r1よりも大きくなるように、各キングピン軸13、14が配置されている。
一般的に、キングピン軸の位置や傾き、及びスクラブ半径の大きさは、車両Cの走行特性や転舵特性に大きな影響を与える。具体的には、スクラブ半径を大きくすると、走行モードの切り替え特性は向上する一方で、車両Cの走行特性が悪化することがある。上記のように、キングピン軸を第一のキングピン軸13と第二のキングピン軸14で別々に構成し、第一のキングピン軸13を車輪wの転舵操作用、第二のキングピン軸14を走行モードの切り替え用として機能させ、さらに、第二のキングピン軸14のスクラブ半径r2の方が、第一のキングピン軸13のスクラブ半径r1よりも大きくなるように構成することにより、走行特性の確保と走行モードの切り替え特性の確保の両立を図ることができる。
ナックル12には、第二のキングピン軸14周りの車輪wの回動を固定するロック機構16が設けられている。このロック機構16は、挿通孔が形成されるとともにナックル12に固定されたロック部本体18と、前記挿通孔に挿し込まれる複数の係合凹部19a、19b、19cが形成され、車輪w側に設けられたロックバー20と、ロック部本体18を作動させるソレノイド動作部21とを有している。ロック部本体18内には、係合凹部19a、19b、19cと嵌合可能な係合突部(図示せず)が設けられている。
前記挿通孔にロックバー20を挿し込み、ロック部本体18内に係合凹部19a、19b、19cのうちいずれかが位置している状態で、ソレノイド動作部21を作動させることによって、係合凹部19a、19b、19cと係合突部の係合又は解除(ロック又はロック解除)を自在に行うことができる。ここで、係合凹部19aはその場回転モードに、係合凹部19bは小回りモードに、係合凹部19cは横方向移動モードにそれぞれ対応している。なお、図1に示すステアリング装置10は、通常の走行モードの状態を示しており、本図中には現れていないが、ロック部本体18内に、通常の走行モードに対応する係合凹部が形成されており、この係合凹部と係合突部が係合した状態となっている。
ソレノイド動作部21を作動させてロック部本体18をロック解除状態(係合凹部19a、19b、19cと係合突部の係合が解除された状態)とし、ナックル12に連結された転舵装置15(例えば、図5に示す構成においてはラック15a)を駆動し、車輪wと路面との間の摩擦によってこの車輪wの転舵を防止しつつ、ナックル12を第一のキングピン軸13周り及び第二のキングピン軸14周りに回動して走行モードを切り替えることができる(第一走行モード切替ステップ)。
また、ロック解除状態とした上で、転舵装置15を固定状態(ラック15aが移動不可の状態)とし、車輪wをインホイールモータM(駆動源)で駆動することによって、ナックル12を第二のキングピン軸14周りに回動して、走行モードを切り替えることもできる(第二走行モード切替ステップ)。
ロック部本体18内に係合凹部19a、19b、19cのうちいずれかが位置したタイミングで、転舵装置15又はインホイールモータMの駆動を停止する。この停止後にソレノイド動作部21を再び作動させて、係合凹部19a、19b、19cのいずれかと、ロック部本体18内の係合突部とを係合させる。これにより、各係合凹部19a、19b、19cの位置に対応した走行モードへの切り替えが完了する。この係合凹部19a、19b、19cの数は、車両Cに採用する走行モードの数に応じて適宜変更される。
この実施形態においては、ロック機構16をロック部本体18、ロックバー20、及びソレノイド動作部21で構成したが、例えば、回転円盤と、この回転円盤の回転を固定する固定ピン等、他の固定構造を採用することもできる。また、ロックの確実性を高めるために、二つ以上の固定構造を併用することもできる。また、上記駆動源として、インホイールモータMの代わりに、油圧シリンダ、空圧シリンダ、電動シリンダ、又は、モータと減速機の組み合わせのいずれかを採用することもできる。
従動輪用ステアリング装置30は、駆動輪用ステアリング装置10と同様に、図3に示すように、懸架装置11(アッパーアーム11a、ロワアーム11b)を介して、例えば、車両C(図4参照)のシャーシ(図示せず)に設けられたナックル12と、懸架装置11に対し、ナックル12を転舵方向に回動させる第一のキングピン軸13と、ナックル12に対し、車輪wを車両Cの各走行モードに対応する方向に回動させる第二のキングピン軸14と、第一のキングピン軸13周りに車輪wを左右同方向に転舵可能な転舵装置15(図5参照)と、第二のキングピン軸14周りの車輪wの回動を、前記各走行モードに対応する位置でロック可能なロック機構16と、をその基本構成とする。
ナックル12は、このナックル12の上下端部に回動軸13a、13bを有する第一のキングピン軸13の周りに回動可能にタイロッド17に接続されている。このタイロッド17は、車輪wを転舵する転舵装置15(図5等参照)に接続されている。転舵装置15を駆動してタイロッド17を移動させることにより、ナックル12を第一のキングピン軸13周りに回動して、車輪wを転舵することができる。車輪には、軸支部材31が固定されており、この軸支部材31によって、ナックル12が、第一のキングピン軸13周りに回動可能に保持されている。
この転舵装置15として、駆動輪用ステアリング装置10と同様に、運転者のステアリング操作によって、左右の車輪wとタイロッド17を介して接続されたラック15aを左右に移動させて、この左右の車輪wを左右同方向に転舵するラックアンドピニオン方式のものを採用することができる。また、この転舵装置15として、ステアリング1と転舵装置15が機械的に直接連結された方式、又は、ステアリング1と前記転舵装置15が直接連結されておらず、ステアリング操作に基づいてアクチュエータ等の駆動力で、転舵装置15のラック15a等を駆動するステアバイワイヤ方式のいずれの方式のものも採用することができる。
ナックル12には、第二のキングピン軸14と同軸に、第二のキングピン軸14周りの車輪w(軸支部材31)の回動を固定するロック機構16が設けられている。このロック機構16は、ナックル12に対する車輪wの角度を、通常走行モード、その場回転モード、横方向移動モード、小回りモードに対応するいずれかの位置でロック又はロック解除を自在に行うことができるようになっている。
第二のキングピン軸14は、第一のキングピン軸13よりもナックル12の中央寄りに回動軸14a、14b(図1(a)等参照)を有しており、この第二のキングピン軸14に、車輪w(軸支部材31)が回動可能に設けられている。また、駆動輪用ステアリング装置10と同様に、第二のキングピン軸14のスクラブ半径r2の方が、第一のキングピン軸13のスクラブ半径r1よりも大きくなるように、各キングピン軸13、14が配置されている。
ロック機構16をロック解除状態とし、ナックル12に連結された転舵装置15(例えば、図5に示す構成においてはラック15a)を駆動し、車輪wと路面との間の摩擦によってこの車輪wの転舵を防止しつつ、ナックル12を第一のキングピン軸13周り及び第二のキングピン軸14周りに回動して走行モードを切り替えることができる(第一走行モード切替ステップ)。
(2)車両の走行モードの切り替え方法について
車両Cの走行モードの切り替え方法の一連の手順について、図6及び図7を用いて説明する。この説明に係る車両Cは、前輪FR、FLにインホイールモータMを備えていない従動輪、後輪RR、RLにインホイールモータMを備えた駆動輪を有しており、前輪FR、FL側に従動輪用ステアリング装置30が、後輪RR、RL側に駆動輪用ステアリング装置10がそれぞれ設けられている。従動輪用ステアリング装置30は、運転者のステアリング1の操作に基づいて駆動される一方で、駆動輪用ステアリング装置10は、アクチュエータ(図示せず)によって駆動される。
車両Cの走行モードの切り替え方法の一連の手順について、図6及び図7を用いて説明する。この説明に係る車両Cは、前輪FR、FLにインホイールモータMを備えていない従動輪、後輪RR、RLにインホイールモータMを備えた駆動輪を有しており、前輪FR、FL側に従動輪用ステアリング装置30が、後輪RR、RL側に駆動輪用ステアリング装置10がそれぞれ設けられている。従動輪用ステアリング装置30は、運転者のステアリング1の操作に基づいて駆動される一方で、駆動輪用ステアリング装置10は、アクチュエータ(図示せず)によって駆動される。
(a)通常走行モードから横方向移動モードへの切り替え(図6)
通常走行モード(本図(a))から横方向移動モード(本図(h))への切り替えについて説明する。通常走行モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30に設けられたロック機構16(図3及び図8参照)が、いずれも通常走行モードに対応するロック位置でロックされた状態となっている(本図(a))。
通常走行モード(本図(a))から横方向移動モード(本図(h))への切り替えについて説明する。通常走行モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30に設けられたロック機構16(図3及び図8参照)が、いずれも通常走行モードに対応するロック位置でロックされた状態となっている(本図(a))。
まず、左前輪FLのロック機構16を解除した上で、ステアリング1を左向きに操作する。すると、転舵装置15のラックバー15aが右向きに移動して右前輪FRが左向きに転舵する。左前輪FLは、そのロック機構16が解除されていることから、左前輪FLのナックル12は、第一のキングピン軸13及び第二のキングピン軸14のいずれの軸周りにも自在に回動し得るようになっている。ところが、路面との間の摩擦によって転舵することができないため、左前輪FLに対してナックル12のみが、両キングピン軸13、14周りに回動する。このため、ナックル12の位置が、通常走行モードに対応するロック位置からずれた状態となる(本図(b))。
次に、右前輪FRが左向きにある程度の舵角だけ転舵したら、この右前輪FRのロック機構16を解除した上で、ステアリング1を右向きに操作する。このとき、左右前輪FL、FRのいずれのロック機構16も解除されているため、左右前輪FL、FRのいずれも転舵することなく、それらのナックル12、12のみが両キングピン軸13、14周りに回動する。そして、左前輪FLのナックル12が、通常走行モードに対応する位置となったときに、この左前輪FLのロック機構16をロック状態とする。引き続き、ステアリング1を右向きに操作すると、左前輪FLは右向きに転舵する一方で、右前輪FRは転舵することなくそのナックル12のみが両キングピン軸13、14周りに回動し、左右前輪FL、FRが、ハの字形を形成する(本図(c))。
さらに、左右前輪FL、FRのロック機構16を解除した上で、ステアリング1の位置(右向きに操作した状態となっている)を固定したまま、左右後輪RL、RRにそれぞれ設けたインホイールモータMを後退方向に駆動する。このとき、ステアリング1の位置が固定されていることから、左右前輪FL、FRのナックル12は第一のキングピン軸13周りに回動することができず、左右前輪FL、FRは第二のキングピン軸14周りに左右方向(左右前輪FL、FRの転舵角度が大きくなる方向)に回動する。
そして、右前輪FRのナックル12が、横方向移動モードに対応する位置となったときに、この右前輪FRのロック機構16のみをロック状態とする(本図(d))。この右前輪FRのロック機構16をロックさせるのと同時に、インホイールモータMの駆動を停止する。
さらに、ステアリング1を左向きに操作すると、ロック状態を解除したままの左前輪FLのナックル12が、両キングピン軸13、14周りに回動する一方で、ロック状態とした右前輪FRは左向きに転舵する。そして、右前輪FRの転舵角が車両の前後方向に対して90度となったとき(ステアリング1が中立状態となったとき)に右前輪FRのロック状態16を解除する(本図(e))。この状態からさらにステアリング1を左向きに操作し、左前輪FLのナックル12が、横方向移動モードに対応する位置になったときに、この左前輪FLのロック機構16をロック状態とする。このとき、右前輪FRは、転舵することなくそのナックル12のみが両キングピン軸13、14周りに回動する(本図(f))。
さらに、ステアリング1を右向きに操作すると、左前輪FLが右向きに転舵し、左前輪FLの転舵角が車両の前後方向に対して90度となったとき(ステアリング1が中立状態となったとき)に、右前輪FRのロック機構16をロック状態とする。これにより、左右前輪FL、FRが、横方向移動モードに対応する向きに転舵される(本図(g))。
最後に、駆動用ステアリング装置10の中立状態を保ったまま、左右後輪RL、RRのロック機構16を解除し、インホイールモータMを後退方向に駆動する。このとき、左右前輪FL、FRは、横向きに転舵されているため車両は後退することができず、しかも、左右後輪RL、RRのナックル12は、第一のキングピン軸13周りに回動することができないため、インホイールモータMの駆動に伴って、左右後輪RL、RRは第二のキングピン軸14周りに左右方向(左右後輪RL、RRの転舵角度が大きくなる方向)に転舵する。左右後輪RL、RRの転舵角が、車両の前後方向に対して90度となったときに、左右後輪RL、RRのロック機構16をロック状態とするとともに、インホイールモータMの駆動を停止する。これにより、左右前後の全ての車輪FL、FR、RL、RRが横方向に90度転舵された、横方向移動モードとすることができる(本図(h))。
(b)横方向移動モードから通常走行モードへの切り替え(図7)
横方向移動モード(本図(a))から通常走行モード(本図(h))への切り替えについて説明する。横方向移動モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30に設けられたロック機構16(図3及び図8参照)が、いずれも横方向移動モードに対応するロック位置でロックされた状態となっている(本図(a))。
横方向移動モード(本図(a))から通常走行モード(本図(h))への切り替えについて説明する。横方向移動モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30に設けられたロック機構16(図3及び図8参照)が、いずれも横方向移動モードに対応するロック位置でロックされた状態となっている(本図(a))。
まず、駆動用ステアリング装置10の中立状態を保ったまま、左右後輪RL、RRのロック機構16を解除し、インホイールモータMを前進方向に駆動する。このとき、左右前輪FL、FRは、横向きに転舵されているため車両は前進することができず、しかも、左右後輪RL、RRのナックル12は、第一のキングピン軸13周りに回動することができないため、インホイールモータMの駆動に伴って、左右後輪RL、RRは第二のキングピン軸14周りに前後方向(左右後輪RL、RRが互いに平行になる方向)に転舵する。左右後輪RL、RRが車両の前後方向に対して0度となったときに、左右後輪RL、RRのロック機構16をロック状態とするとともに、インホイールモータMの駆動を停止する(本図(b))。
次に、右前輪FRのロック機構16を解除した上で、ステアリング1を左向きに操作すると、ロック状態としたままの左前輪FLは左向きに転舵する。右前輪FRは、そのロック機構16が解除されていることから、右前輪FRのナックル12は、第一のキングピン軸13及び第二のキングピン軸14のいずれの軸周りにも自在に回動し得るようになっている。ところが、路面との間の摩擦によって転舵することができないため、右前輪FRに対してナックル12のみが両キングピン軸13、14周りに回動する。このため、ナックル12の位置が、横方向移動モードに対応するロック位置からずれた状態となる(本図(c))。
左前輪FLが左向きにある程度転舵したら、この左前輪FLのロック機構16を解除した上で、ステアリング1を右向きに操作する。このとき、左右前輪FL、FRのいずれのロック機構16も解除されているため、左右前輪FL、FRのいずれも転舵することなく、それらのナックル12のみが両キングピン軸13、14周りに回動する。そして、右前輪FRのナックル12が、横方向移動モードに対応する位置となったとき(ステアリング1が中立状態となったとき)に、この右前輪FRのロック機構16をロック状態とする(本図(d))。
引き続き、ステアリング1を右向きに操作すると、左前輪FLは転舵することなくそのナックル12のみが両キングピン軸13、14周りに回動する一方で、右前輪FRは右向きに転舵する(本図(e))。この状態で、右前輪FRのロック機構16を解除し、ステアリング1の位置(右向きに転舵した状態となっている)を固定したまま、左右後輪RL、RRにそれぞれ設けたインホイールモータMを前進方向に駆動する。このとき、ステアリング1の位置が固定されていることから、左右前輪FL、FRのナックル12は第一のキングピン軸13周りに回動することができず、左右前輪FL、FRは第二のキングピン軸14周りに前後方向(左右前輪FL、FRが平行に近付く方向)に回動する。
そして、左前輪FLのナックル12が、通常走行モードに対応する位置となったときに、この左前輪FLのロック機構16のみをロックした状態とする(本図(f))。この左前輪FLのロック機構16をロックさせるのと同時に、インホイールモータMの駆動を停止する。
さらに、ステアリング1を左向きに操作すると、ロック状態とした左前輪FLは左向きに転舵する一方で、ロック状態を解除したままの右前輪FRのナックル12が、両キングピン軸13、14周りに回動する。そして、右前輪FRのナックル12が、通常走行モードに対応する位置になったときに、左右前輪FL、FRのロック機構16をロック状態とすることにより、左右前後の全ての車輪FL、FR、RL、RRを通常走行モードとすることができる(本図(g))。このロック状態で、ステアリング1を右向きに操作して中立状態とすると、左右前輪FL、FRを直進状態とすることができる(本図(h))。
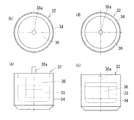
車両C(図4参照)に採用される第二のキングピン軸14周りのロック機構16について、図8から図12を用いて説明する。このロック機構16は、軸支部材31、ナックル12、及びロック装置32を主要な構成要素としている。図8はロック機構16の要部(ロック装置32の近傍)を、図9は軸支部材31を、図10はナックル12を、図11はロック装置32を、図12はロック装置16の作用をそれぞれ示している。
軸支部材31は、車輪wの回転軸方向に延設された本体部31aを有し、この本体部31aには、上下方向に延びる軸部31bが突設されている(図9(a)(b)参照)。この軸部31bは後述するナックル12に形成された貫通孔12dに挿し込まれ、第二のキングピン軸14周りに回転自在となっている。この軸部31bの下端外周面には、車両Cが備える各走行モードにおける車輪wの転舵角度に対応する位置に、断面が半円弧状のロック溝33(33a、33b、33c)が形成されている(図9(b)(c)参照)。この実施形態においては、ロック溝33aが通常走行モードに、ロック溝33bがその場回転モードに、ロック溝33cが横方向移動モードにそれぞれ対応している。
三種類の走行モードを備える車両Cの場合、三カ所にロック溝33a、33b、33cが形成されるが、このロック溝33a、33b、33cの数は、その車両Cが備える走行モードの種類に対応して適宜増減される。本体部31aの端部には、嵌合突起31cが形成されており(図9(a)(b)参照)、この嵌合突起31cがホイールに嵌め込まれることによって、軸支部材31が車輪wに固定される(図3参照)。
ナックル12は、側面視コの字形の本体部12aを有し、この本体部12aには、上下方向に、第一のキングピン軸13周りに回転自在な軸部12bが突設されている(図10(a)(c)参照)。軸部12bの先端に形成された球状の部分に、アッパーアーム11a及びロワアーム11b(図3参照)がそれぞれ接続される。本体部12aの中ほどには、延設部12cが延設されており、この延設部12cの先端に、タイロッド17(図3参照)が接続される。
ナックル12の本体部12aには、軸支部材31に突設した軸部31bを挿し込む一対の貫通孔12d、12dが形成されている。一対の貫通孔12d、12dのうち下側の貫通孔12dの内周面には、断面が半円弧状のロック溝12eが一カ所形成されている(図10(e)(f)参照)。貫通孔12dに挿し込まれた軸支部材31の軸部31bを第二のキングピン軸14周りに回転して、この軸部31bの外周面に形成されたロック溝33a、33b、33cのいずれかと、貫通孔12dの内周面に形成されたロック溝12e(図10(b)(e)参照)の位置を合わせると、一つの円形のロック穴が形成される。
ロック装置32は、有底筒状のハウジング34を有し、このハウジング34の内部に、ソレノイドコイル35と、ロックプランジャ36が設けられている。このロックプランジャ36の先端には、ロックピン36aが形成されている。ロックプランジャ36とハウジング34との間には、付勢部材(図示せず)が介在して設けられている。
ソレノイドコイル35の非作動時は、前記付勢部材の付勢力によって、ロックピン36aがハウジング34から突出し(図11(a)参照)、このロックピン36aが、軸部31bと貫通孔12dの内周面との間に形成された円形のロック穴に挿し込まれる(図8(a)参照)。ロック穴にロックピン36aが挿し込まれることによって、ナックル12が第二のキングピン軸14周りに回転できない状態(ロック状態)となる。
その一方で、ソレノイドコイル35の作動時は、このソレノイドコイル35の磁力によってロックプランジャ36がハウジング34の内側に引き付けられて(図11(c)参照)、ロック穴からロックピン36aが退去する(図8(b)参照)。これにより、ナックル12が第二のキングピン軸14周りに回転自在の状態(ロック解除状態)となる。
図12に示すように、通常走行モードにおいては、軸部31bに形成されたロック溝33aと、貫通孔12dの内周面に形成されたロック溝12eとによって形成されるロック穴に(本図(b)参照)、その場回転モードにおいては、軸部31bに形成されたロック溝33bと、貫通孔12dの内周面に形成されたロック溝12eとによって形成されるロック穴に(本図(d)参照)、横方向移動モードにおいては、軸部31bに形成されたロック溝33cと、貫通孔12dの内周面に形成されたロック溝12eとによって形成されるロック穴に(本図(f)参照)、ロックピン36a(図8(a)参照)がそれぞれ挿し込まれ、各走行モードに対応する車輪wの転舵角度においてナックル12がロックされる。なお、図12の各図においては、ロック装置32(ロックピン36a以外)の図示を省略している。
なお、図6及び図7に示した走行モードの切り替え手順は、あくまでも例示に過ぎない。この手順と同様の手順で、例えば、通常走行モードとその場回転モードとの間で、走行モードの切り替えを行うこともできる。また、通常走行モードと横方向移動モードとの間で走行モードの切り替えを行うときに、両モードの間で直接切り替えを行うのではなく、例えば、モード切り替えの途中で、その場回転モード等の他の走行モードを介在させてもよい。車輪wの転舵角度差が大きい走行モード(例えば、通常走行モードと横方向移動モード)の間に、両走行モードの中間の転舵角度の走行モード(例えば、その場回転モード)を介在させることにより、走行モードの切り替えを一層スムーズに行うことができるためである。
また、図6及び図7に示した走行モードの切り替え手順においては、従動輪の走行モードの切り替えのアシストとして、駆動輪に設けたインホイールモータMの駆動力を利用したが、従動輪用ステアリング装置30で車輪wを左右に転舵しつつ、ロック機構16によるロック及びロック解除を適宜行うことにより、インホイールモータMの駆動力によるアシストを受けることなく、従動輪の走行モードの切り替えを行うことができる場合もある。また、駆動輪の走行モードの切り替えを従動輪の走行モードの切り替えと同様に、インホイールモータMの駆動力を用いることなく行うことができる場合もある。
(3)各走行モードについて
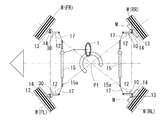
車両C(図4参照)の走行モードを図13から図16に示す平面図を用いて説明する。各図中に記載の白三角形は車両Cの前方を示し、白抜きの矢印は各走行モード(又は転舵状態)における車両Cの進行方向を表す。なお、これらの各図は、各走行モード時における車輪wの転舵方向に注目するために、駆動輪用ステアリング装置10と従動輪用ステアリング装置30との間の制御系及び駆動系の詳細については記載を省略している。また、ここで示す車両Cにおいては、左右後輪RL、RRのみにインホイールモータMが設けられているが、左右前輪FL、FRのみ又は全ての車輪FL、FR、RL、RRにインホイールモータMを設けた構成とすることもできる。
車両C(図4参照)の走行モードを図13から図16に示す平面図を用いて説明する。各図中に記載の白三角形は車両Cの前方を示し、白抜きの矢印は各走行モード(又は転舵状態)における車両Cの進行方向を表す。なお、これらの各図は、各走行モード時における車輪wの転舵方向に注目するために、駆動輪用ステアリング装置10と従動輪用ステアリング装置30との間の制御系及び駆動系の詳細については記載を省略している。また、ここで示す車両Cにおいては、左右後輪RL、RRのみにインホイールモータMが設けられているが、左右前輪FL、FRのみ又は全ての車輪FL、FR、RL、RRにインホイールモータMを設けた構成とすることもできる。
(a)通常走行モード(図13)
通常走行モードは、一般的な車両と同様に、通常の走行時において前輪FL、FRを左右同方向に転舵するモードである。通常走行モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30のロック機構16(本図及び後で説明する図14から図16では記載を省略している。図1及び図3を参照)は、通常走行モードに対応する位置においてロックされている。このロックによって、ナックル12は第二のキングピン軸14周りに回動不能となる。この状態でステアリング1を操作すると、前輪FL、FRを左右に転舵することができる。例えば、図13に示すように前輪FL、FRを右に転舵した状態で、後輪RL、RRに設けたインホイールモータMを駆動すると、本図中に白抜きの矢印で示すように、車両Cを右折することができる。
通常走行モードは、一般的な車両と同様に、通常の走行時において前輪FL、FRを左右同方向に転舵するモードである。通常走行モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30のロック機構16(本図及び後で説明する図14から図16では記載を省略している。図1及び図3を参照)は、通常走行モードに対応する位置においてロックされている。このロックによって、ナックル12は第二のキングピン軸14周りに回動不能となる。この状態でステアリング1を操作すると、前輪FL、FRを左右に転舵することができる。例えば、図13に示すように前輪FL、FRを右に転舵した状態で、後輪RL、RRに設けたインホイールモータMを駆動すると、本図中に白抜きの矢印で示すように、車両Cを右折することができる。
(b)その場回転モード(図14)
その場回転モードは、同一の位置で車両Cの向きを変更するモードである。その場回転モードは、図6で説明した横方向移動モードの場合と、各車輪w(FL、FR、RL、RR)の転舵角度が異なるが、通常の走行モードからその場回転モードへの切り替えは、同様の手順で行うことができる。その場回転モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30のロック機構16は、その場回転モードに対応する位置においてロックされている。この状態で後輪RL、RRに設けたインホイールモータMのうち少なくとも一つを駆動すると、車両Cは回転中心P1を中心として回転し、この車両Cの向きを変更することができる。なお、その場回転モードにおいてもステアリング1を操作することができ、このステアリング操作によって、車両Cの回転中心P1の位置をずらすことも可能である。
その場回転モードは、同一の位置で車両Cの向きを変更するモードである。その場回転モードは、図6で説明した横方向移動モードの場合と、各車輪w(FL、FR、RL、RR)の転舵角度が異なるが、通常の走行モードからその場回転モードへの切り替えは、同様の手順で行うことができる。その場回転モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30のロック機構16は、その場回転モードに対応する位置においてロックされている。この状態で後輪RL、RRに設けたインホイールモータMのうち少なくとも一つを駆動すると、車両Cは回転中心P1を中心として回転し、この車両Cの向きを変更することができる。なお、その場回転モードにおいてもステアリング1を操作することができ、このステアリング操作によって、車両Cの回転中心P1の位置をずらすことも可能である。
(c)横方向移動モード(図15)
横方向移動モードは、車両Cが前方を向いた状態のまま、この車両1の直進方向に対して90度直交する方向に移動させるモードである。図6において説明したように、横方向移動モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30のロック機構16は、横方向移動モードに対応する位置においてロックされている。この状態で後輪RL、RRに設けたインホイールモータMのうち少なくとも一つを駆動すると、通常の走行方向に対して車両Cを真横に移動することができる。なお、この横方向移動モードにおいてもステアリング1を操作することができ、このステアリング操作によって、車両Cの移動方向を真横から少し前後いずれかに偏った方向に調節することも可能である。
横方向移動モードは、車両Cが前方を向いた状態のまま、この車両1の直進方向に対して90度直交する方向に移動させるモードである。図6において説明したように、横方向移動モードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30のロック機構16は、横方向移動モードに対応する位置においてロックされている。この状態で後輪RL、RRに設けたインホイールモータMのうち少なくとも一つを駆動すると、通常の走行方向に対して車両Cを真横に移動することができる。なお、この横方向移動モードにおいてもステアリング1を操作することができ、このステアリング操作によって、車両Cの移動方向を真横から少し前後いずれかに偏った方向に調節することも可能である。
(d)小回りモード(図16)
小回りモードは、ほぼ同一の位置で車両Cの向きを変更するモードである。小回りモードは、図6で説明した横方向移動モードの場合と前輪FL、FRの転舵角度と、後輪RL、RRを転舵しない点が異なるが、通常の走行モードから小回りモードへの切り替えは、ほぼ同様の手順で行うことができる。小回りモードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30のロック機構16は、小回りモードに対応する位置においてロックされている。この状態で前輪FL、FRに設けたインホイールモータMのうち少なくとも一つを駆動すると、車両Cは回転中心P2を中心として回転し、この車両Cの向きを変更することができる。なお、この小回りモードにおいてもステアリング1を操作することができ、このステアリング操作によって、車両Cの回転中心P2の位置をずらすことも可能である。
小回りモードは、ほぼ同一の位置で車両Cの向きを変更するモードである。小回りモードは、図6で説明した横方向移動モードの場合と前輪FL、FRの転舵角度と、後輪RL、RRを転舵しない点が異なるが、通常の走行モードから小回りモードへの切り替えは、ほぼ同様の手順で行うことができる。小回りモードにおいては、駆動輪用ステアリング装置10及び従動輪用ステアリング装置30のロック機構16は、小回りモードに対応する位置においてロックされている。この状態で前輪FL、FRに設けたインホイールモータMのうち少なくとも一つを駆動すると、車両Cは回転中心P2を中心として回転し、この車両Cの向きを変更することができる。なお、この小回りモードにおいてもステアリング1を操作することができ、このステアリング操作によって、車両Cの回転中心P2の位置をずらすことも可能である。
上記実施形態に係るステアリング装置10、30、及び車両Cの走行モードの切り替え方法はあくまでも一例であって、簡便な装置構成で、通常走行モードから特殊走行モードへの切り替えを行う、という本願発明の課題を解決し得る限りにおいて、各ステアリング装置10、30の構成の一部を変更したり、走行モードの切り替え方法のステップに他のステップを追加したりすることも許容される。
1 ステアリング
10 (駆動輪用)ステアリング装置
11 懸架装置
11a アッパーアーム
11b ロワアーム
12 ナックル
12a 本体部
12b 軸部
12c 延設部
12d 貫通孔
12e ロック溝
13 第一のキングピン軸
14 第二のキングピン軸
15 転舵装置
16 ロック機構
17 タイロッド
18 ロック部本体
19a、19b、19c 係合凹部
20 ロックバー
21 ソレノイド動作部
30 (従動輪用)ステアリング装置
31 軸支部材
31a 本体部
31b 軸部
31c 嵌合突起
32 ロック装置
33a、33b、33c ロック溝
34 ハウジング
35 ソレノイドコイル
36 ロックプランジャ
36a ロックピン
r1 (第一のキングピン軸の)スクラブ半径
r2 (第二のキングピン軸の)スクラブ半径
C 車両
M 駆動源(インホイールモータ)
w 車輪
FR 右前輪
FL 左前輪
RR 右後輪
RL 左後輪
10 (駆動輪用)ステアリング装置
11 懸架装置
11a アッパーアーム
11b ロワアーム
12 ナックル
12a 本体部
12b 軸部
12c 延設部
12d 貫通孔
12e ロック溝
13 第一のキングピン軸
14 第二のキングピン軸
15 転舵装置
16 ロック機構
17 タイロッド
18 ロック部本体
19a、19b、19c 係合凹部
20 ロックバー
21 ソレノイド動作部
30 (従動輪用)ステアリング装置
31 軸支部材
31a 本体部
31b 軸部
31c 嵌合突起
32 ロック装置
33a、33b、33c ロック溝
34 ハウジング
35 ソレノイドコイル
36 ロックプランジャ
36a ロックピン
r1 (第一のキングピン軸の)スクラブ半径
r2 (第二のキングピン軸の)スクラブ半径
C 車両
M 駆動源(インホイールモータ)
w 車輪
FR 右前輪
FL 左前輪
RR 右後輪
RL 左後輪
Claims (7)
- 懸架装置(11)を介してシャーシに設けられたナックル(12)と、
前記懸架装置(11)に対し、前記ナックル(12)を転舵方向に回動する第一のキングピン軸(13)と、
前記ナックル(12)に対し、車輪(w)を車両(C)の各走行モードに対応する角度に回動する第二のキングピン軸(14)と、
前記第一のキングピン軸(13)周りに前記車輪(w)を左右同方向に転舵可能な転舵装置(15)と、
前記第二のキングピン軸(14)周りの前記車輪(w)の回動を、前記各走行モードに対応する位置でロック可能なロック機構(16)と、
を備えたステアリング装置。 - 前記第二のキングピン軸(14)周りに前記車輪(w)を転舵させる駆動源(M)を前後の前記車輪(w)の少なくとも一方にさらに備えた請求項1に記載のステアリング装置。
- 前記第二のキングピン軸(14)のスクラブ半径(r2)が、前記第一のキングピン軸(13)のスクラブ半径(r1)よりも大きくなるように、前記第一のキングピン軸(13)及び前記第二のキングピン軸(14)を配置した請求項1又は2に記載のステアリング装置。
- 前記駆動源(M)が、前記車輪(w)に設けられたインホイールモータ、油圧シリンダ、空圧シリンダ、電動シリンダ、又は、モータと減速機の組み合わせのいずれかである請求項1から3のいずれか1項に記載のステアリング装置。
- 懸架装置(11)を介してシャーシに設けられたナックル(12)に、前記懸架装置(11)に対し、前記ナックル(12)を転舵方向に回動させる第一のキングピン軸(13)と、前記ナックル(12)に対し、車輪(w)を車両(C)の走行モードに対応する方向に回動させる第二のキングピン軸(14)を設けるとともに、前記第二のキングピン軸(14)周りの前記車輪(w)の回動を、前記車両(C)が採り得る各走行モードに対応する位置でロック可能なロック機構(16)を設け、
前記ロック機構(16)をロック状態とした上で、前記ナックル(12)に連結された左右の前記車輪(w)を左右同方向に転舵可能な転舵装置(15)を駆動し、前記ナックル(12)を前記第一のキングピン軸(13)周りに回動して車輪(w)を転舵する車輪転舵ステップと、
前記ロック機構(16)をロック解除状態とした上で、前記ナックル(12)に連結された前記転舵装置(15)を駆動し、前記車輪(w)と路面との間の摩擦によってこの車輪(w)の転舵を防止しつつ、前記ナックル(12)を前記第一のキングピン軸(13)周り及び前記第二のキングピン軸(14)周りに回動して走行モードを切り替える、第一走行モード切替ステップと、
を交互に又はいずれか一方を行うことにより車両(C)の走行モードを切り替える車両の走行モードの切り替え方法。 - 前記ロック機構(16)をロック解除状態とした上で、前記転舵装置(15)を固定状態とし、前記車輪(w)を駆動源(M)で駆動することによって、前記ナックル(12)を前記第二のキングピン軸(14)周りに回動して、走行モードを切り替える、第二走行モード切替ステップをさらに備えた請求項5に記載の車両の走行モードの切り替え方法。
- 前記駆動源(M)が、前記車輪に設けられたインホイールモータ、油圧シリンダ、空圧シリンダ、電動シリンダ、又は、モータと減速機の組み合わせのいずれかである請求項6に記載の車両の走行モードの切り替え方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/075406 WO2016039312A1 (ja) | 2014-09-11 | 2015-09-08 | ステアリング装置、及び車両の走行モードの切り替え方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015122851 | 2015-06-18 | ||
| JP2015122851 | 2015-06-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017007633A true JP2017007633A (ja) | 2017-01-12 |
Family
ID=57761192
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015145034A Pending JP2017007633A (ja) | 2014-09-11 | 2015-07-22 | ステアリング装置、及び車両の走行モードの切り替え方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017007633A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019214369A (ja) * | 2019-07-31 | 2019-12-19 | Ntn株式会社 | 転舵軸付ハブベアリングおよび転舵機能付ハブユニット |
| CN115289543A (zh) * | 2022-07-27 | 2022-11-04 | 青岛海尔空调器有限总公司 | 家用电器 |
| US11565548B2 (en) | 2017-11-28 | 2023-01-31 | Ntn Corporation | Hub unit having steering function, and vehicle provided with said hub unit |
-
2015
- 2015-07-22 JP JP2015145034A patent/JP2017007633A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11565548B2 (en) | 2017-11-28 | 2023-01-31 | Ntn Corporation | Hub unit having steering function, and vehicle provided with said hub unit |
| JP2019214369A (ja) * | 2019-07-31 | 2019-12-19 | Ntn株式会社 | 転舵軸付ハブベアリングおよび転舵機能付ハブユニット |
| CN115289543A (zh) * | 2022-07-27 | 2022-11-04 | 青岛海尔空调器有限总公司 | 家用电器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6351944B2 (ja) | ステアリング装置 | |
| EP3028927B1 (en) | Steering device and vehicle with same | |
| CN105658503B (zh) | 车辆 | |
| CN105636855B (zh) | 车辆 | |
| WO2014171389A1 (ja) | ステアリング装置、そのステアリング装置を用いた車両、及び、4輪転舵機構を備えた車両 | |
| JP2017007633A (ja) | ステアリング装置、及び車両の走行モードの切り替え方法 | |
| WO2016039312A1 (ja) | ステアリング装置、及び車両の走行モードの切り替え方法 | |
| JP2016055804A (ja) | ステアリング装置及び車両の走行モードの切り替え方法 | |
| JP6246010B2 (ja) | 車両及び走行モードの切り替え方法 | |
| WO2016121677A1 (ja) | ステアリング装置及びそれを備えた車両 | |
| WO2015050190A1 (ja) | ステアリング装置 | |
| JP2015182637A (ja) | 走行モードの切り替え制御方法及び車両 | |
| RU2565631C2 (ru) | Система рулевого управления для транспортного средства | |
| WO2016117585A1 (ja) | ステアリング装置 | |
| JP2014210484A (ja) | 4輪転舵機構を備えた車両 | |
| JP2016088410A (ja) | 車両用操舵装置 | |
| JP2016132316A (ja) | ステアリング装置及び車両 | |
| JP2006160166A (ja) | 車輪の操舵機構 | |
| JP2017109546A (ja) | ステアリング装置及び車両 |