本発明は、ラフロードテスタにおいて、加振用ローラの外周の凹凸が車両の車輪に与える振動の各方向の成分に着目し、従来採用されていた2軸式の構成における加振用ローラの凹凸の車輪への衝突の態様に起因して生じる、実路面での走行状態を再現する際の不具合を見出し、かかる不具合を解消すべくなされたものである。本発明に係るラフロードテスタは、各車輪に対して設けられる加振用ローラを1軸式の構成としながら、加振用ローラとともに車輪を支持する補助ローラを備える構成とすることにより、試験走行状態として実路面での走行状態に極めて近い走行状態を容易に実現することを可能とするものである。以下、本発明の実施の形態を説明する。
[第1実施形態]
本発明の第1実施形態について説明する。図1および図2に示すように、本実施形態に係るラフロードテスタ1は、検査対象(試験対象)の車両2に振動を加えて車両2の走行試験を行うためのものである。すなわち、ラフロードテスタ1は、検査対象としての車両2に振動を加えることで、車両2が走行する実路面での車両2の走行状態を再現し、車両2の異音・騒音や振動等についての走行試験を行うための装置である。
本実施形態において、車両2は、乗用自動車であり、車輪3としてそれぞれ互いに同軸配置された左右一対の前輪3Fおよび後輪3Rを有する4輪の車両である。車輪3は、ホイル3aとホイル3aのリムの外周に装着されたタイヤ本体3bとからなる。
ラフロードテスタ1は、車両2に振動を加える部分として、外周に凹凸が設けられた加振用ローラ10を備える。加振用ローラ10は、その回転軸方向を車両2の車輪3の回転軸方向(図2における左右方向)と平行とし、各車輪3に対応する位置に配置される。つまり、加振用ローラ10は、左右の前輪3Fおよび後輪3Rの各車輪3に対して配設される。
ラフロードテスタ1による走行試験に際しては、検査対象としての車両2が、ラフロードテスタ1上に載置支持された状態となる。車両2は、各車輪3を加振用ローラ10に接触させた状態、つまり加振用ローラ10上に車輪3を介して車両の本体2aを支持させた状態で支持される。図1および図2に示す例では、矢印A1の方向を車両2の進行方向(前進方向)とする。
本実施形態のラフロードテスタ1によれば、車両2の自走による車輪3の回転駆動により、車輪3と加振用ローラ10とが互いに接触した状態で回転し、凹凸面となる加振用ローラ10の外周面を路面に模擬した走行状態が得られる。このため、ラフロードテスタ1は、加振用ローラ10について次のような構成を備える。
図2に示すように、左右の前輪3F用の左右一対の加振用ローラ10F、および左右の後輪3R用の左右一対の加振用ローラ10Rは、それぞれ互いに同軸配置され、一体的に同軸回転するように連結軸部16により互いに連結されている。すなわち、前輪3F・3F用の左右の加振用ローラ10F・10F、および後輪3R・3R用の左右の加振用ローラ10R・10Rのそれぞれは、連結軸部16により互いに相対回転不能に連結されている。連結軸部16は、左右の加振用ローラ10同士を一体的に連結する部分であり、左右方向を延設方向とする軸を主体とした構成である。
連結軸部16には、カップリング連結部20が設けられている。カップリング連結部20は、連結軸部16を構成する部分として左右の加振用ローラ10から延出された軸部16a同士を一体的に連結する。カップリング連結部20は、例えば、各軸部16aの端部に設けられたフランジ部等の接合部同士を締結部材等を用いて接合固定させた状態で軸部16a同士を相対回転不能に連結する。
カップリング連結部20は、軸部16a同士を軸回りについて複数の連結位置で固定可能とし、左右の加振用ローラ10の相対的な回転方向の位置を調整可能に構成されている。つまり、カップリング連結部20は、連結軸部16により互いに連結される左右の加振用ローラ10について、回転軸回りの相対的な位相を段階的にあるいは無段階で変更することができるように構成されている。
また、前側の加振用ローラ10Fおよび後側の加振用ローラ10Rは、伝動ベルト17による回転伝達機構によって互いに連動して回転するように構成されている。伝動ベルト17は、無端状のベルトであり、前後それぞれの加振用ローラ10について、左右一方(図示では左方)の加振用ローラ10から左右方向の外側に連結軸部16と同軸上に延設された延設軸部に設けられた前後のプーリ18に巻回される。
以上のような構成により、左右の加振用ローラ10は連結軸部16によって一体的に回転するとともに、前後の加振用ローラ10はプーリ18および伝動ベルト17によって同期して回転する。したがって、前輪駆動、後輪駆動、および4輪駆動といった車両2の駆動方式にかかわらず、車両2の車輪3のうちの駆動輪が回転駆動することで、駆動輪に接触した状態の加振用ローラ10が駆動輪の回転にともなって従動回転し、4つの加振用ローラ10が連動して同期回転する。このようにして車両2の走行状態が再現される。
なお、車両2の自走によって4つの加振用ローラ10を同期回転させるための構成は、本実施形態に限定されるものではなく、例えば伝動ベルト及びプーリに代えてチェーンとスプロケット等を用いた構成等、適宜周知の構成が採用される。また、モータ等の駆動源を用いて加振用ローラ10を回転駆動させる構成が採用されてもよい。
本実施形態のラフロードテスタ1は、加振用ローラ10とともに車輪3を支持する補助ローラ30を備える。補助ローラ30は、その回転軸方向を車両2の車輪3の回転軸方向、つまり加振用ローラ10の回転軸方向と平行とし、各車輪3に対応する位置に配置される。つまり、補助ローラ30は、左右の前輪3Fおよび後輪3Rの各車輪3に対して配設される。
このように、本実施形態のラフロードテスタ1において、車両2の各車輪3には、回転軸方向を互いに平行とする加振用ローラ10および補助ローラ30が、それぞれ1個ずつ、つまり回転軸について1軸ずつ配設されている。また、各車輪3に対する加振用ローラ10および補助ローラ30の配置構成は、車両2が有する4つの車輪3で共通である。
ラフロードテスタ1は、加振用ローラ10および補助ローラ30上に支持する車両2の乗入れ等に際して車両2の走行面となる床面4aを形成する床板部4を有する(図1参照)。床板部4には、加振用ローラ10および補助ローラ30を各ローラの上端が床面4aと略同じ高さ位置に位置するように上側に臨ませる矩形状の開口部4bが設けられている。つまり、加振用ローラ10および補助ローラ30は、床板部4の開口部4bを介して床面4aと略同一平面上に臨み、車輪3の接触を受けて車両2を支持する。したがって、加振用ローラ10、補助ローラ30、これらのローラの連動機構や支持機構等は、床板部4の下方の床下空間内に配設される。
以下の説明では、車両2の各車輪3に対して設けられる加振用ローラ10および補助ローラ30を含む構成を加振支持ローラ機構部5とする。以下、本実施形態のラフロードテスタ1が備える加振用ローラ10および補助ローラ30について詳細に説明する。
まず、加振用ローラ10の構成について説明する。図3および図4に示すように、加振用ローラ10は、上述した連結軸部16の連結を受ける円柱状のローラ本体部11を有する。加振用ローラ10は、床面4aよりも下方の所定の位置に設けられた軸受等の軸支部により回転可能に支持される。加振用ローラ10は、ローラ本体部11の中心軸に一致する所定の回転軸線12を回転中心線として回転する。
加振用ローラ10(ローラ本体部11)は、車両2の車輪3よりも小径である。本実施形態では、加振用ローラ10の外径は、例えば、車輪3の外径の約1/3〜1/2程度である。ただし、加振用ローラ10の外径と車輪3の外径との相対的な大小関係は特に限定されるものではない。また、加振用ローラ10は、床板部4の開口部4bの左右開口幅と略同じ長さを有する。
加振用ローラ10が外周に有する凹凸は、加振用ローラ10の外周面となるローラ本体部11の外周面11aに設けられた一または複数の突起部13により形成されている。本実施形態では、加振用ローラ10の凹凸は、複数の突起部13により形成されており、各突起部13は、略矩形板状や略直方体状等の所定の形状を有する突起ブロック13aがローラ本体部11に取り付けられることにより設けられている。
突起ブロック13aは、ローラ本体部11の外周面11aから突出するようにローラ本体部11にボルト等の締結具によって固着され、突起部13を形成する。このように、ローラ本体部11の外周面に複数の突起部13が設けられることにより、加振用ローラ10の外周面に凹凸面部が設けられている。本実施形態では、加振用ローラ10が有する突起部13は全て共通の形状・寸法である。ただし、複数種類の形状・寸法の突起部13が設けられてもよい。
ローラ本体部11に対する突起ブロック13aの貼付けパターン、つまり加振用ローラ10の凹凸パターンは、車両2に付与する振動パターンとして、想定する実路面の種類等に応じて適宜設定される。本実施形態では、ローラ本体部11において、突起ブロック13aが固着可能な被固着部が、ローラ本体部11の軸方向および周方向に規則的に配列されている。そして、適宜選択した被固着部に突起ブロック13aを固定することで、所定の凹凸パターンが形成される。なお、被固着部は、例えば、突起ブロック13aの形状・寸法に合わせた配置スペースに、突起ブロック13aを固定するための締結具の螺挿孔が設けられた構成である。
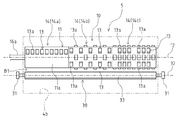
図4に示すように、本実施形態に係る加振用ローラ10は、突起ブロック13aの貼付けパターンについて長手方向(回転軸方向)に3つの凹凸領域14(14a、14b、14c)に区分されており、3種類の凹凸パターンを有する。具体的には、車両2の前進方向に向かって左側の凹凸領域14aから右側の凹凸領域14cにかけて順に、突起ブロック13aの配置の密度が徐々に高くなるように、突起ブロック13aの貼付けによる凹凸パターンが設定されている。例えば、突起ブロック13aの配置の密度が最も低い左側の凹凸領域14aにおいては、ローラ本体部11の軸方向に沿って直線状に、つまり同一位相に配設された突起部13群が、ローラ本体部11の周方向について1箇所に設けられている。
車両2の各車輪3に対応する4箇所の加振支持ローラ機構部5の加振用ローラ10は、4つの車輪3が共通の種類の凹凸領域14上に位置するように配設されている。図2では、左右中央の凹凸領域14b上に車輪3が位置する状態が示されている。なお、加振用ローラ10の各凹凸領域14の左右幅(加振用ローラ10の回転軸方向の寸法)は、車輪3の幅よりも十分に広い寸法(例えば1.5〜2倍程度)に設定されている。
次に、補助ローラ30の構成について説明する。図3および図4に示すように、補助ローラ30は、床面4aよりも下方の位置に設けられた軸受等の軸支部31により回転可能に支持される。補助ローラ30は、その中心軸に一致する所定の回転軸線32を回転中心線として回転する。
補助ローラ30は、加振用ローラ10よりも小径である。本実施形態では、補助ローラ30の外径は、例えば、加振用ローラ10の外径の約1/3〜1/2程度である。ただし、補助ローラ30の外径と加振用ローラ10の外径との相対的な大小関係は特に限定されるものではない。また、補助ローラ30は、加振用ローラ10と同様に床板部4の開口部4bの左右開口幅と略同じ長さを有する。
補助ローラ30は、周方向について円周に沿って平坦な外周面33を有する。本実施形態では、補助ローラ30は、回転軸方向に細長い円柱状の外形を有し、円柱状の外形に沿う外周面33を有する。つまり、補助ローラ30は、外周面33として、周方向については円周に沿うとともに長手方向(中心軸方向)については直線に沿う円柱面を有する。ただし、補助ローラ30の外周面33は、少なくとも周方向について円周に沿って平坦な面であればよい。したがって、補助ローラ30の外周面33は、例えば、補助ローラ30の幅方向について凹凸を有する面であってもよい。
以上のような加振用ローラ10および補助ローラ30を備える加振支持ローラ機構部5においては、加振用ローラ10は、車両2の車輪3に対して車両2の進行方向の前下側に位置し、車輪3に外接した状態で回転するように設けられる。つまり、加振用ローラ10は、車輪3の下半部分かつ前半部分に当接する。かかる加振用ローラ10の車輪3に対する相対的な位置関係は、車輪3が加振用ローラ10および補助ローラ30により支持された状態(以下、車輪3について「支持状態」とする。)での位置関係である。
したがって、補助ローラ30は、車輪3に対して車両2の進行方向の後下側に位置し、加振用ローラ10とともに車輪3を支持する。つまり、補助ローラ30は、上述のとおり車輪3の前下側に位置する加振用ローラ10の車輪3に対する位置関係が保持されるように、車輪3の後側において補助的に車輪3を支持する。したがって、補助ローラ30は、車輪3の下半部分かつ後半部分に当接する。
図3に示すように、加振用ローラ10および補助ローラ30は、それぞれの上端が床面4aと略同じ高さに位置するように設けられる。そして、加振用ローラ10は、その回転中心を、支持状態の車輪3の回転中心O1よりも前側に位置させる。つまり、加振用ローラ10は、その回転軸線12の位置を、支持状態の車輪3の回転中心O1からの下方への鉛直線O2よりも前方に位置させる。また、補助ローラ30は、その回転中心を、支持状態の車輪3の回転中心O1よりも後側に位置させる。つまり、補助ローラ30は、その回転軸線32の位置を、支持状態の車輪3の回転中心O1からの下方への鉛直線O2よりも後方に位置させる。
本実施形態では、加振用ローラ10および補助ローラ30は、それぞれの回転中心の位置関係および外径寸法により、上面視で互いの間にわずかな隙間(図4、符号B1参照)が生じるように配設されている。ただし、加振用ローラ10および補助ローラ30は、上面視で表れる隙間が生じないように、つまり加振用ローラ10の後端部と補助ローラ30の前端部が上下にオーバーラップするように配設されてもよい。そして、加振用ローラ10および補助ローラ30は、車輪3の前後の下半部分における下側寄りの位置、つまり車輪3の下端部近傍の前後の位置に当接する。
支持状態の車輪3に対して以上のような位置関係を有する加振用ローラ10および補助ローラ30は、互いの位置関係を一定に保ちながら車輪3に外接した状態で車輪3を支持する。ここで、加振用ローラ10は、複数の突起部13による凹凸面部を車輪3のタイヤ本体3bに接触させ、補助ローラ30は、円柱面である外周面33を車輪3のタイヤ本体3b(外周面3c)に接触させた状態で、車輪3とともに加振用ローラ10と同じ回転方向に回転する。
支持状態の車輪3に対する加振用ローラ10および補助ローラ30の相対的な位置関係について詳細に説明する。
上述のとおり、加振用ローラ10および補助ローラ30は、前後方向について支持状態の車輪3の回転中心O1の位置を間に介して前後に位置する。そこで、加振用ローラ10については、車輪3の回転にともなう突起部13の車輪3に対する衝突位置に基づいて、支持状態の車輪3に対する位置関係が規定される。具体的には、加振用ローラ10の車輪3に対する相対的な位置は、車輪3が突起部13の衝突を受ける位置の、車輪3の回転軸の位置から鉛直下方の位置を基準とする車輪3の回転軸回りの角度(以下「突起衝突角度」という。)αに基づいて規定される。
ここで、突起衝突角度αに関し、車輪3が突起部13の衝突を受ける位置(以下「突起衝突位置」という。)とは、車輪3および加振用ローラ10の互いに接触した回転状態において、ローラ本体部11の外周面11aから突出した突起部13が車輪3に対して最初に接触する位置である。すなわち、突起衝突位置は、車輪3の外周面3cにおける周方向についての位置であり、前進する車両2の車輪3の回転(図3において左回転(矢印C1参照))にともなう加振用ローラ10の回転(図3において右回転(矢印C2参照))の動作において、突起部13が車輪3に対して前側から衝突する位置P1である。
このため、支持状態の車輪3の前下側に加振用ローラ10が位置する構成において、突起衝突位置は、車輪3の回転中心O1と加振用ローラ10の回転軸線12とを結ぶ直線上に位置する車輪3と加振用ローラ10との外接位置(外接中心位置)P2に対して前側(図3において左側)に位置する。例えば、図3に示すような側面視(加振用ローラ10の回転軸方向視)において、加振用ローラ10の外周面11aから矩形状に突出する突起部13の場合、突起部13の後側(加振用ローラ10の回転方向については前側)の角部分が車輪3の外周面3cに当接する位置P1が、突起衝突位置となる。そして、加振用ローラ10および補助ローラ30は、支持状態の車輪3に対して、突起衝突角度αが45°未満の角度(例えば、15〜25°の範囲内の角度)となるように配設される。
また、図3に示すように、本実施形態のラフロードテスタ1は、加振用ローラ10と補助ローラ30との相対的な位置を変化させる移動機構として、補助ローラ30を移動させるシリンダ機構40を備える。シリンダ機構40は、補助ローラ30を所定の方向に進退させるアクチュエータであり、補助ローラ30をその進退方向に移動させることで、加振用ローラ10と補助ローラ30との相対的な位置を変化させる。
シリンダ機構40は、油圧により動作する油圧シリンダ機構であり、例えば円筒状のシリンダ部41と、シリンダ部41に同軸状に内装されたピストン部42とを有する。ピストン部42の先端部に、支持部材等を介して補助ローラ30が回転可能に支持される。ピストン部42は、例えば略円柱状の部材であり、シリンダ部41に対して、シリンダ部41の筒軸方向の一側から出没可能に設けられている。つまり、シリンダ機構40は、ピストン部42のシリンダ部41からの出没動作(進退動作)によって伸縮するように構成されている。
シリンダ機構40は、補助ローラ30の長手方向(回転軸方向)について一または複数配設される。シリンダ機構40は、シリンダ部41が床板部4の下方の床下空間内において所定の位置に支持固定されることで、ピストン部42の進退方向を所定の向きとした状態で設けられる。したがって、シリンダ機構40におけるピストン部42の進退動作により、ピストン部42の先端部に設けられた補助ローラ30がピストン部42の進退方向(矢印D1参照)に移動する。
シリンダ機構40による補助ローラ30の移動方向(矢印D1)は、例えば、図3に示すように、前上側から後下側への斜め方向、つまり後下がり(前上がり)の傾斜方向である。このような補助ローラ30の移動により、車輪3の後下側に位置する補助ローラ30が、車輪3の前下側に位置する加振用ローラ10に対して近接離間する。
なお、シリンダ機構40は、油圧シリンダ機構のほか、空気圧により動作するエアシリンダ機構等のシリンダ機構であってもよい。また、補助ローラ30を移動させるための構成については、シリンダ機構40に限定されるものではなく、適宜周知の移動機構を採用することができる。また、補助ローラ30の移動方向は、例えば水平方向等であってもよく、本実施形態に限定されるものではない。
また、本実施形態のラフロードテスタ1においては、上述のとおり左右の加振用ローラ10同士を連結する連結軸部16に、カップリング連結部20が設けられている。カップリング連結部20によれば、左右の加振用ローラ10の回転軸回りの相対的な位相を変更することができる。したがって、カップリング連結部20によれば、左右の加振用ローラ10の凹凸の相対的な位相を調整することができる。このように、本実施形態において前後の左右の加振用ローラ10同士を連結する連結軸部16に設けられたカップリング連結部20は、左右一対の加振用ローラ10の凹凸の相対的な位相を調整するための位相調整部として機能する。
また、本実施形態のラフロードテスタ1においては、図2に示すように、加振用ローラ10および補助ローラ30の左右両端部の近傍の位置、つまり床板部4の開口部4bの開口縁部の近傍の位置に、サイドローラ45が設けられている。サイドローラ45は、車両2の走行試験中に、車輪3が左右方向(加振用ローラ10の軸方向)について加振用ローラ10の凹凸面部の範囲から外れることを規制するためのものである。サイドローラ45は、上下方向を回転軸方向として回転自在に支持されている。サイドローラ45は、支持状態の車輪3のホイル3aよりも下側のタイヤ本体3bの部分に接触するように設けられている。なお、図4においてはサイドローラ45の図示を省略している。
以上のような本実施形態のラフロードテスタ1による走行試験の手順について説明する。走行試験に際しては、試験対象となる車両2が、各車輪3が対応する加振支持ローラ機構部5上に位置するように、床面4a上を走行してラフロードテスタ1に乗り入れられる。これにより、車両2の各車輪3が、加振用ローラ10および補助ローラ30上に位置して支持状態となる。
ここで、ラフロードテスタ1においては、試験対象となる車両2について車種により異なるホイルベース(前後の車輪3の軸間距離)に対応するため、前後の加振支持ローラ機構部5について、前後方向の相対的な位置を変化させるための移動機構(図示略)が設けられている。かかる移動機構は、例えば、油圧シリンダ等のアクチュエータを備えた機構であり、前側または後側の左右一対の加振支持ローラ機構部5を一体的に前後方向に移動させる。ここで、前後の加振用ローラ10を同期回転させるための伝動ベルト17のテンションを維持するため、例えば、左右一対の加振支持ローラ機構部5の前後方向の移動に連動するテンション調整用のシリンダ機構によって変位するテンションプーリが伝動ベルト17に対して設けられる。こうした前後の加振支持ローラ機構部5の車種による位置調整は、例えば、コード認識等を利用した車種の判別の結果に基づく加振支持ローラ機構部5の動作制御によって自動的に行われる。
以上のようにして各車輪3が対応する加振支持ローラ機構部5上に位置し車両2がセットされた状態で、車両2が任意の速度で走行することにより、車輪3の回転駆動にともなって各車輪3に接触した状態の加振用ローラ10および補助ローラ30が回転する。これにより、車両2の前後方向の位置が保持された状態で、加振用ローラ10の凹凸面部を路面に模擬した走行状態が得られ、加振用ローラ10の凹凸面部によって車両2に振動が加えられる。
試験走行状態においては、車両2のステアリングによって車両2が左右に移動し、その左右方向の位置が調整される。したがって、車両2のステアリングの調整により、加振用ローラ10上の車輪3が位置する凹凸領域14(14a、14b、14c)の種類が適宜変更される。これにより、車両2に加えられる振動パターンが適宜変更される。このようにして車両2の実路面での走行状態が再現され、車両2の運転者または同乗者が試験員となり、車両2の走行試験として、例えば、車両2の異音・騒音や振動等についての官能検査等が行われる。
以上説明した本実施形態のラフロードテスタ1によれば、検査対象の車両2について、実路面走行時の車両振動に近似した振動状態を容易に得ることができる。このような効果が得られることについて、本実施形態のラフロードテスタ1に対する比較例として従来の2軸式の構成を挙げて説明する。
図5(a)に示すように、車両2の実路面(一般路面)走行時において、車輪3は、実路面101上に存在する突起102を乗り越える際に、下端部近傍の前側の部分に突起102の衝突を受ける。ここで、実路面101上の突起102について、上述した突起衝突角度αと同様の角度を衝突角度α1とする。つまり、衝突角度α1は、車輪3が突起102の衝突を受ける衝突位置P3の、車輪3の回転軸の位置(回転中心O1)から鉛直下方の位置を基準とする車輪3の回転軸回りの角度である。なお、実路面101上の突起102は、本実施形態に係る加振用ローラ10の突起部13と同様のものを想定したものであり、車輪3が容易に乗り越えられる程度に車輪3に対して十分に小さい。
実路面101上の突起102の車輪3に対する衝突位置P3は、車輪3の下端位置の近傍の位置となる。このため、衝突角度α1は、例えば15°程度の比較的小さい角度となる。
一方、図5(b)に示すように、各車輪3に対して2つの加振用ローラ110が前後に配置される2軸式の構成においては、前後の加振用ローラ110間に車輪3を落とし込んだ態様での走行試験が行われる。このため、前側の加振用ローラ110Aの外周の突起部113の車輪3に対する衝突位置P4が、実路面走行時における突起102の車輪3に対する衝突位置P3よりも大幅に上方に位置することになる。このことは、2軸式の構成においては、突起部113の衝突位置P4が、実路面走行時において実路面101に接触する車輪3の下端の位置(直線L1参照)よりも上方に位置することによる。
ここで、前側の加振用ローラ110Aの外周の突起部113について、上述した突起衝突角度αと同様の角度を衝突角度α2とする。つまり、衝突角度α2は、車輪3が前側の加振用ローラ110Aの突起部113の衝突を受ける衝突位置P4の、車輪3の回転中心O1から鉛直下方の位置を基準とする車輪3の回転軸回りの角度である。なお、加振用ローラ110の突起部113は、本実施形態に係る加振用ローラ10の突起部13を想定したものである。
2軸式の構成における前側の加振用ローラ110Aの外周の突起部113の車輪3に対する衝突位置P4は、車輪3の下端位置よりも大幅に上方に位置する。このため、衝突角度α2は、実路面走行時における衝突角度α1よりも大きくなり、例えば45°程度の比較的大きい角度となる。
ここで、実路面101上の突起102および加振用ローラ110の突起部113の車輪3に対する衝突に関し、衝突による入力の前後方向(水平方向)および上下方向(垂直方向)の成分に着目する。車輪3に対する衝突による入力の大きさは、振動の大きさに関係する。つまり、車輪3に対する入力の成分が大きいほど、その方向についての振動は大きいと言える。
図5(a)に示すように、実路面走行時においては、衝突による入力の成分に関し、前後方向の成分(後向きの成分)a1は、上下方向の成分(上向きの成分)a2よりも小さい。つまり、実路面走行時における突起102の車輪3に対する衝突による車両2の振動については、車両2の前後方向の振動(揺れ)が比較的弱くなり、車両2の上下方向の振動(揺れ)が比較的強くなる。
これに対し、図5(b)に示すように、2軸式の構成においては、衝突による入力の成分に関し、実路面走行時との比較において、前後方向の成分b1が大きくなり、上下方向の成分b2が小さくなる。つまり、2軸式の構成における突起部113の車輪3に対する衝突による車両2の振動については、車両2の前後方向の振動(揺れ)が比較的強くなり、車両2の上下方向の振動(揺れ)が比較的弱くなる。したがって、例えば、2軸式の構成において、実路面走行時のように上下方向の入力成分を大きくしようとした場合、それにともなって前後方向の入力成分も大きくなってしまうという不具合が生じる。
このように、2軸式の構成の場合、加振用ローラ110の突起部113によって得られる車両2の振動状態(揺れ方)が実路面走行時における車両2の振動状態と大きく異なることになり、実路面101での走行環境を模擬した走行試験としては十分な試験結果を得ることが困難となる。
そこで、図5(c)に示すように、本実施形態のラフロードテスタ1は、2軸式の構成のような前後の加振用ローラ110間に車輪3を落とし込むという構成(図(b))とは異なり、加振用ローラ10および補助ローラ30により、1軸式の加振用ローラ10の上に車輪3を載せた状態で支持する構成である。言い換えると、車輪3の前下側に位置する加振用ローラ10上に車輪3を載せた状態が、加振用ローラ10および補助ローラ30による車輪3の支持状態として得られる。したがって、補助ローラ30の加振用ローラ10に対する相対的な配置位置や補助ローラ30の径などは、車輪の前下側に位置する加振用ローラ10の上に車輪3を載せた状態が保持されるように設定される。
このような本実施形態のラフロードテスタ1によれば、加振用ローラ10に対する補助ローラ30の配置位置等により、突起衝突角度αを調整することが可能となる。これにより、突起衝突角度αを、実路面走行時における衝突角度α1(図5(a)参照)に可及的に近付けることが可能となる。つまり、本実施形態のラフロードテスタ1によれば、車輪3に対する突起部13の衝突位置P1を、車輪3の下端の近傍の位置となる、実路面走行時における車輪3に対する突起102の衝突位置P3に可及的に近付けることが可能となる。
このため、図5(c)に示すように、本実施形態のラフロードテスタ1においては、衝突による入力の成分に関し、前後方向の成分c1および上下方向の成分c2を、それぞれ実路面走行時における前後方向の成分a1および上下方向の成分a2に可及的に近付けることができる。つまり、本実施形態のラフロードテスタ1における突起部13の車輪3に対する衝突による車両2の振動については、実路面走行時と同様に、車両2の前後方向の振動(揺れ)が比較的弱くなり、車両2の上下方向の振動(揺れ)が比較的強くなる。
本実施形態のラフロードテスタ1において、突起衝突角度αは、少なくとも、車輪3が加振用ローラ10の突起部13からの衝突により受ける入力の上下方向の成分が前後方向の成分よりも大きくなるように設定される。かかる観点から、加振用ローラ10および補助ローラ30は、支持状態の車輪3に対して、突起衝突角度αが45°未満となるように配設される。
また、好ましくは、加振用ローラ10および補助ローラ30は、支持状態の車輪3に対して、突起衝突角度αが15〜25°の範囲内の角度となるように配設される。これにより、突起部13が支持状態の車輪3に衝突することによる上下方向および前後方向の入力成分を、実路面走行時における各方向の入力成分に効果的に近付けることができる。
突起衝突角度αの大きさは、特に限定されるものではないが、例えば、加振用ローラ10と補助ローラ30による安定的な車輪3の支持状態を得る観点からは、突起衝突角度αは15°よりも大きい方が好ましい。また、実路面走行時における衝突角度α1に近付ける観点からは、突起衝突角度αは25°よりも小さい方が好ましい。
以上のように、本実施形態のラフロードテスタ1によれば、加振用ローラ10および補助ローラ30の配置構成により、実路面走行時の車両振動に近似した振動状態を得ることができる。また、本実施形態のラフロードテスタ1によれば、加振用ローラ10に対する補助ローラ30の配置位置等によって突起衝突角度αを調整することが可能となることから、車輪3のサイズや市場環境に応じて突起衝突角度αを変更できるフレキシブルな構造が実現される。
また、加振用ローラ10および補助ローラ30の互いの干渉を避けながら加振用ローラ10の突起部13の車輪3への衝突位置P1を実路面走行時における突起102の衝突位置P3に近付ける観点からは、補助ローラ30は、加振用ローラ10よりも小径であることが好ましい。つまり、補助ローラ30を加振用ローラ10よりも小径(例えば約1/3〜1/2程度)とすることにより、実路面走行時の車両振動に近似した振動状態を容易に実現することができる。
また、図5(b)に示すような2軸式の構成において、車輪3の後側の加振用ローラ110Bの突起部113による加振作用は、実路面101を走行する車両2の前進時には車輪3が受けることのない作用である。すなわち、実路面101で前進する車両2は、実路面101上の突起102に乗り上げることによって車輪3の前側から突起102の衝突を受けるため、基本的には車輪3の後側において実路面101上の突起102による衝突を受けることがない。このため、2軸式の構成における後側の加振用ローラ110Bによる加振作用は、実路面走行時の車両振動を再現する妨げになり得る。
この点、本実施形態のラフロードテスタ1によれば、車輪3に振動を加える加振用ローラ10は、車輪3の前側のみに存在し、車輪3の後側は、周方向について円周に沿って平坦な外周面33を有する補助ローラ30により支持される。かかる構成により、2軸式の構成の場合における後側の加振用ローラ110Bの加振作用による振動成分のような不必要な振動成分が生じることがない。このような点からも、実路面走行時の車両振動に近似した振動状態を得ることができる。
また、本実施形態のラフロードテスタ1においては、加振用ローラ10と補助ローラ30との相対的な位置を変化させる移動機構として、補助ローラ30を移動させるシリンダ機構40が設けられている。このように可動式の補助ローラ30を採用することにより、例えば図3において二点鎖線で示すように、加振用ローラ10に対する補助ローラ30および車輪3の位置を補助ローラ30の可動範囲で任意に調整することができる。これにより、車輪3に対する突起衝突角度αを任意に変更することが可能となる。結果として、車両2の車種や加振用ローラ10の凹凸面部の態様等によって、加振用ローラ10と補助ローラ30の相対的な位置関係の変更を容易に行うことが可能となり、様々な条件下での実路面走行時の再現に容易に対応することができる。
また、本実施形態のラフロードテスタ1においては、左右の加振用ローラ10同士を連結する連結軸部16に、左右一対の加振用ローラ10の凹凸の相対的な位相を調整するための位相調整部として、カップリング連結部20が設けられている。このような構成によれば、カップリング連結部20によって左右の加振用ローラ10の凹凸の位相を変更することにより、突起部13の車輪に対する衝突に関し、衝突による入力のワイド方向(左右方向)の成分についても調整することが可能となる。
これにより、上述したような加振用ローラ10および補助ローラ30の配置関係に基づく突起衝突角度αの調整による前後方向および上下方向の振動の調整に加え、例えばうねり道等の走行時において生じるワイド方向の振動についても調整することが可能となる。結果として、加振用ローラ10により車両2に加える振動に関し、前後方向、上下方向、および左右方向について3次元的に振動成分(入力成分)を調整することが可能となり、実路面での走行状態の再現性を向上させることができる。
[第2実施形態]
本発明の第2実施形態について説明する。なお、以下の説明では、第1実施形態と共通する内容については同一の符号を用いて説明を省略する。図6および図7に示すように、本実施形態に係るラフロードテスタ51は、加振用ローラ10および補助ローラ30による車輪3の支持状態を保持する安全ローラ60を備える点で、第1実施形態のラフロードテスタ1と異なる。
安全ローラ60は、加振用ローラ10等と同様にその回転軸方向を車両2の車輪3の回転軸方向(図7における左右方向)と平行とし、各車輪3に対応する位置に配置される。つまり、安全ローラ60は、左右の前輪3Fおよび後輪3Rの各車輪3に対して配設される。安全ローラ60は、各車輪3に対して前後一対配置され、車輪3を前後から挟み込むように配設されている。すなわち、安全ローラ60は、各車輪3の前後に2個、つまり回転軸について2軸配設されている。
安全ローラ60は、前記加振用ローラおよび前記補助ローラよりも高い位置で前記車輪に接触することで、加振用ローラ10および補助ローラ30による車輪3の支持状態を保持する。安全ローラ60は、支持状態の車輪3に対して、車輪3の外周面3cに常時接触ないし略接触するように、あるいは車輪3の外周面3cとの間にわずかな隙間を開けるように配置され、車輪3が加振用ローラ10および補助ローラ30による支持状態から前後方向に外れることを規制する。この支持状態の車輪3に対する安全ローラ60の配置位置が、安全ローラ60の作動位置となる。
安全ローラ60は、軸受等の所定の軸支部61により回転可能に支持される。安全ローラ60は、その中心軸に一致する所定の回転軸線62を回転中心線として回転する。
安全ローラ60は、補助ローラ30と略同径あるいは補助ローラ30よりも小径である。ただし、安全ローラ60の外径と補助ローラ30との相対的な大小関係等、安全ローラ60の外径は特に限定されるものではない。また、安全ローラ60は、加振用ローラ10および補助ローラ30に対して若干短めの長さを有する(図7参照)。ただし、安全ローラ60は、加振用ローラ10等と同様に床板部4の開口部4bの左右開口幅と略同じ長さを有するものであってもよい。
安全ローラ60は、周方向について円周に沿って平坦な外周面63を有する。本実施形態では、安全ローラ60は、補助ローラ30と同様に、回転軸方向に細長い円柱状の外形を有し、円柱状の外形に沿う外周面63を有する。ただし、安全ローラ60の外周面63は、少なくとも周方向について円周に沿って平坦な面であればよい。したがって、安全ローラ60の外周面63は、例えば、安全ローラ60の幅方向について凹凸を有する面であってもよい。
図6および図8に示すように、安全ローラ60は、安全ローラ移動機構70により移動可能に設けられている。安全ローラ移動機構70は、加振用ローラ10および補助ローラ30に対する安全ローラ60の位置を変更するために安全ローラ60を移動させる。言い換えると、安全ローラ移動機構70は、加振用ローラ10および補助ローラ30による支持状態の車輪3に対する安全ローラ60の位置を変更するために安全ローラ60を移動させる。
安全ローラ移動機構70は、第1シリンダ機構部としての下段シリンダ機構部71と、下段シリンダ機構部71の上側に設けられた第2シリンダ機構部としての上段シリンダ機構部72とを有し、上下方向および斜め方向の2段の油圧シリンダ機構として構成されている。下段シリンダ機構部71は、上段シリンダ機構部72を介して安全ローラ60を上下方向に移動させる。上段シリンダ機構部72は、下段シリンダ機構部71によって上下方向に移動するとともに、安全ローラ60を斜め方向に移動させる。上段シリンダ機構部72は、安全ローラ60を下側から上側にかけて支持状態の車輪3に近付く斜め方向に移動させる。
安全ローラ移動機構70は、下段部において上下方向に延設された下段シリンダ機構部71と、上段部において斜め方向に延設された上段シリンダ機構部72とにより全体として屈曲状に構成されている。本実施形態では、安全ローラ移動機構70は、各車輪3の前後に配置される全ての安全ローラ60について設けられている。各車輪3に対応する2つの安全ローラ移動機構70は、安全ローラ60を含めて前後に略対称に構成されている。各車輪3に対応する一対の安全ローラ移動機構70は、各加振支持ローラ機構部5における加振用ローラ10および補助ローラ30に対して前後両外側に配設されている。
図8に示すように、下段シリンダ機構部71は、油圧により動作する油圧シリンダ機構により構成されており、下段シリンダ部73と、下段シリンダ部73に内装された下段ピストン部74とを有する。下段ピストン部74は、例えば略円柱状の部材であり、下段シリンダ部73に対して、下段シリンダ部73の一端側から出没可能に設けられている。つまり、下段シリンダ機構部71は、下段ピストン部74の下段シリンダ部73からの出没動作(進退動作)によって上下方向に伸縮するように構成されている。
上段シリンダ機構部72は、下段シリンダ機構部71と同様に油圧シリンダ機構により構成されており、上段シリンダ部75と、上段シリンダ部75に内装された上段ピストン部76とを有する。上段ピストン部76は、例えば略円柱状の部材であり、上段シリンダ部75に対して、上段シリンダ部75の一端側から出没可能に設けられている。つまり、上段シリンダ機構部72は、上段ピストン部76の上段シリンダ部75からの出没動作(進退動作)によって斜め方向に伸縮するように構成されている。
下段ピストン部74の先端側に、上段シリンダ部75が、下段ピストン部74と一体的に移動するように設けられている。かかる構成により、下段ピストン部74の上下方向の動作にともなって、上段シリンダ部75が上下方向に移動する。そして、上段ピストン部76の先端部に、支持部材等を介して安全ローラ60が回転可能に支持されている。
安全ローラ移動機構70は、安全ローラ60の長手方向(回転軸方向)について一または複数配設される。安全ローラ移動機構70は、下段シリンダ部73が床板部4の下方の床下空間内において所定の位置に固定状態で設けられることで、下段ピストン部74および上段ピストン部76の進退方向を所定の向きとするように設けられる。
図8に示すように、安全ローラ移動機構70においては、下段ピストン部74の進退動作により、下段ピストン部74の先端側に設けられた上段シリンダ機構部72が下段ピストン部74の進退方向である上下方向(矢印E1参照)に移動する。また、上段ピストン部76の進退動作により、上段ピストン部76の先端側に設けられた安全ローラ60が上段ピストン部76の進退方向である斜め方向(矢印E2参照)に移動する。
ここで、上段シリンダ機構部72による安全ローラ60の移動方向(矢印E2)は、下側から上側へかけて支持状態の車輪3に近付く斜め方向である。すなわち、上段シリンダ機構部72による安全ローラ60の移動方向は、支持状態の車輪3の前側に位置する安全ローラ移動機構70(70F)においては、前下がり(後上がり)の傾斜方向であり、支持状態の車輪3の後側に位置する安全ローラ移動機構70(70R)においては、前上がり(後下がり)の傾斜方向である。
なお、安全ローラ移動機構70を構成する各シリンダ機構部は、油圧シリンダ機構のほか、空気圧により動作するエアシリンダ機構等によって構成されたものであってもよい。ただし、車両2の実路面走行時を再現するに際して支持状態の車輪3を強固に支持して突起衝突角度を安定させる観点からは、安全ローラ移動機構70の構成として油圧シリンダ等の圧縮性の流体により動作する構成を採用することが好ましい。また、安全ローラ60を移動させるための構成については、安全ローラ移動機構70に限定されるものではなく、適宜周知の移動機構を採用することができる。また、安全ローラ60の移動方向は、本実施形態のような上下方向および斜め方向に限定されるものではない。安全ローラ60の移動方向については、例えば、例えば、水平方向が含まれたり、全体的に斜め方向または上下方向のいずれかの方向のみであったりしてもよい。
以上のように、本実施形態のラフロードテスタ1は、加振用ローラ10および補助ローラ30に対する安全ローラ60の位置を変更するために安全ローラ60を移動させる移動機構として、安全ローラ移動機構70を備える。
以上のような本実施形態のラフロードテスタ51によれば、上述したような走行試験の手順において、試験対象となる車両2の乗入れに際し、図9(a)に示すように、安全ローラ60は、安全ローラ移動機構70によって床面4aの下側に収納された状態となる。すなわち、車両2が乗り入れて各車輪3が対応する加振用ローラ10および補助ローラ30上に位置するに際し、安全ローラ60が車輪3に干渉することがないように、安全ローラ60が収納状態となる。
安全ローラ60の収納状態においては、下段シリンダ機構部71および上段シリンダ機構部72がいずれもピストン部(74,76)の大部分をシリンダ部(73,75)内に収めた状態となり、安全ローラ60がその移動範囲について下側端かつ前後外側端に位置した状態となる。かかる状態において、安全ローラ60は、例えばその上端を床面4aと略同じ高さに位置させる。
そして、上述したような車両2のホイルベースに応じた前後の加振支持ローラ機構部5間の位置調整等を経て車両2がセットされた後、安全ローラ60が、安全ローラ移動機構70の動作によって収納位置から支持状態の車輪3を支持する所定の作動位置(図8参照)まで移動する。安全ローラ60の収納位置から作動位置までの移動量、つまり安全ローラ60の作動位置は、下段シリンダ機構部71および上段シリンダ機構部72それぞれによる安全ローラ60の移動量としてあらかじめ設定される。
具体的には、安全ローラ60の作動位置は、加振用ローラ10および補助ローラ30の車輪3に対する接触位置よりも高い位置であって、車両2のボディを構成するバンパやマッドガード等の車輪3回りの部品の形状等に応じて、これらの部品に干渉することのないような位置に設定される。したがって、安全ローラ60の作動位置は、例えば、車両2の車種等に応じて、前輪3Fおよび後輪3Rそれぞれについて車輪3に対する前後の配置位置により個別に調整された位置となる。
また、安全ローラ移動機構70によれば、車両2の車輪3の大きさに応じて、安全ローラ60の収納状態から作動位置までの移動量が、下段シリンダ機構部71および上段シリンダ機構部72それぞれによる移動量として調整される。図9(b)には、加振用ローラ10および補助ローラ30により支持される車輪3が、比較的外径の小さい車輪3Xである場合を示している。また、図9(c)には、加振用ローラ10および補助ローラ30により支持される車輪3が、比較的外径の大きい車輪3Yである場合を示している。
こうした安全ローラ移動機構70による安全ローラ60の移動量の調整、つまり作動位置についての位置調整は、例えば、コード認識等を利用した車種の判別の結果に基づく安全ローラ移動機構70の動作制御によって自動的に行われる。したがって、安全ローラ移動機構70による安全ローラ60の位置調整は、例えば、上述したようなホイルベースに応じた前後の加振支持ローラ機構部5間の位置調整に用いられる車種の判別結果を利用して行うことができる。
以上説明した本実施形態のラフロードテスタ51によれば、上述したように車両2について実路面走行時の車両振動に近似した振動状態を容易に得ることができることに加え、安全ローラ60により、支持状態の車輪3の前後方向の動きを規制することができるので、試験中における車両2の飛出しを防止することができ、車両2の安定的な試験走行状態を得ることができる。
また、安全ローラ60の移動機構として安全ローラ移動機構70を備えた構成によれば、安全ローラ60の位置調整を容易に行うことができ、車種等により大きさが異なる車輪3に容易に対応することが可能となる。これにより、試験時間を短縮することができ、自動車の製造ライン等において効率的な試験を行うことが可能となる。さらに、コード認識等を利用した車種の判別の結果に基づく安全ローラ移動機構70の動作制御によって自動的に安全ローラ60の位置を調整する構成を採用することにより、より効率的な試験を行うことが可能となる。
[第3実施形態]
本発明の第3実施形態について説明する。図10に示すように、本実施形態に係るラフロードテスタにおいては、各加振支持ローラ機構部5において、補助ローラ30に加え、加振用ローラ10の前側に、第2の補助ローラ80が設けられている。第2の補助ローラ80は、加振用ローラ10を介して補助ローラ30と前後に対称な構成である。
すなわち、第2の補助ローラ80は、その回転軸方向を車両2の車輪3の回転軸方向、つまり加振用ローラ10の回転軸方向と平行とし、各車輪3に対応する位置に配置される。また、第2の補助ローラ80は、床面4aよりも下方の位置に設けられた軸受等の軸支部により回転可能に支持され、その中心軸に一致する所定の回転軸線82を回転中心線として回転する。また、第2の補助ローラ80は、補助ローラ30と同様に、加振用ローラ10よりも小径であり、周方向について円周に沿って平坦な外周面83を有する。
このように加振用ローラ10の前後に、加振用ローラ10とともに車輪3を支持する補助ローラ(30,80)を設けた構成によれば、車両2の向きを変えることなく、車両2の前進走行時に加え、車両2の後進走行時(バック走行時)の走行試験を行うことができる。すなわち、車両2の前進走行時についての走行試験においては、上述したように車輪3の前下側に位置する加振用ローラ10および車輪3の後下側に位置する補助ローラ30によって車輪3の支持状態が得られる(図10、二点鎖線参照)。一方、車両2の後進走行時についての走行試験においては、加振用ローラ10が車輪3の後下側の位置し、第2の補助ローラ80が車輪3の前下側に位置するように、加振用ローラ10および第2の補助ローラ80によって車輪3が支持される。
図10において、矢印A1の方向は、車両2の前進方向であり、その反対方向である矢印A2の方向が、車両2の後進方向である。車両2の後進走行時の走行試験においては、車輪3は前進時と反対方向(矢印C3参照)に回転し、車輪3の回転にともなって加振用ローラ10が前進走行時の走行試験の場合と反対方向(矢印C4参照)に回転する。そして、第2の補助ローラ80は、外周面83を車輪3のタイヤ本体3b(外周面3c)に接触させた状態で、車輪3とともに加振用ローラ10と同じ回転方向に回転する。
以上のような本実施形態のラフロードテスタによれば、車両2をわずかに前後に移動させることにより、車輪3の支持状態について、加振用ローラ10および補助ローラ30による前進時の支持状態と、加振用ローラ10および第2の補助ローラ80による後進時の支持状態とを容易に変更することが可能となる。これにより、実路面の後進時における走行試験を容易に行うことができ、車両2の後進時についても、実路面走行時の車両振動に近似した振動状態を容易に得ることができる。なお、本実施形態に係るラフロードテスタにおいても、第2実施形態のラフロードテスタ51と同様に、安全ローラ60および安全ローラ移動機構70を備えた構成を採用することができる。
以上のように実施形態を用いて説明した本発明に係るラフロードテスタは、上述した実施形態に限定されず、本発明の趣旨に沿う範囲で、種々の態様を採用することができる。
上述した実施形態においては、加振用ローラ10と補助ローラ30との相対的な位置を変化させる移動機構として、補助ローラ30を移動させるシリンダ機構40が設けられているが、これに限定されるものではない。つまり、加振用ローラ10と補助ローラ30との相対的な位置を変化させる移動機構としては、補助ローラ30を移動させる移動機構に代えてあるいはこれに加えて、加振用ローラ10を移動させるための移動機構が設けられてもよい。
また、上述した実施形態においては、左右の前輪3Fおよび左右の後輪3Rの両方が連結軸部16により互いに連結されるとともに、各連結軸部16にカップリング連結部20が設けられているが、これに限定されるものではない。カップリング連結部20は、左右の前輪3F同士を連結する連結軸部16または左右の後輪3R同士を連結する連結軸部16のいずれか一方のみに設けられてもよい。
また、上述した実施形態においては、安全ローラ60は、全ての車輪3の前後両側に配置されているが、これに限定されず、車輪3に対して車両2の進行方向の前側および後側の少なくとも一方側に設けられればよい。したがって、安全ローラ60は、例えば、各車輪3の前側または後側のいずれか一方のみに設けられたり、前輪3Fについては前側(または後側)のみに、後輪3Rについては後側(または前側)のみに設けられたりしてもよい。
また、上述した実施形態においては、加振用ローラ10の外周の凹凸は、凸部である突起部13が設けられることにより形成されているが、これに限定されるものではない。すなわち、加振用ローラ10の外周の凹凸は、凸部および凹部の少なくともいずれかが設けられることで形成され、加振用ローラ10の周方向について凹凸形状をなす部分であればよい。
また、上述した実施形態においては、車両2は乗用自動車であるが、本発明は、広く車両一般に適用することができる。