JP2017009555A - カメラのキャリブレーション装置、カメラのキャリブレーション方法およびカメラのキャリブレーションを行うためのプログラム - Google Patents
カメラのキャリブレーション装置、カメラのキャリブレーション方法およびカメラのキャリブレーションを行うためのプログラム Download PDFInfo
- Publication number
- JP2017009555A JP2017009555A JP2015128494A JP2015128494A JP2017009555A JP 2017009555 A JP2017009555 A JP 2017009555A JP 2015128494 A JP2015128494 A JP 2015128494A JP 2015128494 A JP2015128494 A JP 2015128494A JP 2017009555 A JP2017009555 A JP 2017009555A
- Authority
- JP
- Japan
- Prior art keywords
- sun
- camera
- screen
- estimated
- posture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30181—Earth observation
- G06T2207/30192—Weather; Meteorology
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30244—Camera pose
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Multimedia (AREA)
- Navigation (AREA)
Abstract
【課題】MMSにおけるカメラのキャリブレーションを容易に行える技術の提供を目的とする。
【解決手段】カメラが撮影した画像に写った太陽の前記画像の画面上における位置を特定する太陽の画面中での位置特定部115と、太陽軌道情報に基づき、前記画像の画面上における前記太陽の推定位置を算出する太陽位置算出部113と、太陽の画面中での位置特定部115が特定した前記太陽の前記画面上における位置と、前記太陽位置算出部113が算出した前記太陽の前記画面上における前記推定位置との差に基づいて前記カメラの姿勢を算出するカメラの姿勢算出部116とを備える。
【選択図】図2
【解決手段】カメラが撮影した画像に写った太陽の前記画像の画面上における位置を特定する太陽の画面中での位置特定部115と、太陽軌道情報に基づき、前記画像の画面上における前記太陽の推定位置を算出する太陽位置算出部113と、太陽の画面中での位置特定部115が特定した前記太陽の前記画面上における位置と、前記太陽位置算出部113が算出した前記太陽の前記画面上における前記推定位置との差に基づいて前記カメラの姿勢を算出するカメラの姿勢算出部116とを備える。
【選択図】図2
Description
本発明は、カメラのキャリブレーションを行う技術に関する。
MMS(モバイルマッピングシステム)が知られている。MMSとは、 GNSS装置、カメラ、レーザスキャナ、IMU(慣性航法装置)等を車両に搭載し、走行しながら周辺の3次元データと映像を取得し、走行した環境の三次元データを取得するシステムである。MMSで得た三次元データは、例えば都市計画、土木工事、防災計画等に利用される。
MMSでは、車両に対するカメラの外部標定要素(位置と姿勢)の精度が重要である。車両に対するカメラの外部標定要素を求める作業をキャリブレーションという。初めからカメラが車両に固定されている形態であれば、車両の出荷時にキャリブレーションを行えばよいが、後付で車両にカメラを取り付けた場合やカメラの位置や姿勢を変更した場合はユーザの側でキャリブレーションを行う必要がある。MMSにおけるカメラのキャリブレーションに関しては、例えば特許文献1に記載されている。
カメラのキャリブレーションは専用の標定点を用意する必要があり、その作業も煩雑である。このような背景において、本発明は、MMSにおけるカメラのキャリブレーションを容易に行える技術の提供を目的とする。
請求項1に記載の発明は、カメラが撮影した画像に写った太陽の前記画像の画面上における位置を特定する太陽位置特定部と、太陽軌道情報に基づき、前記画像の画面上における前記太陽の推定位置を算出する太陽推定位置算出部と、前記太陽位置特定部が特定した前記太陽の前記画面上における位置と、前記太陽推定位置算出部が算出した前記太陽の前記画面上における前記推定位置との差に基づいて前記カメラの前記姿勢を算出するカメラの姿勢算出部とを備えることを特徴とするカメラのキャリブレーション装置である。
請求項1に記載の発明によれば、天球面上における位置を正確に求めることができる太陽を標定点として利用して、カメラの姿勢を求めるキャリブレーションが行なわれる。カメラが写した画面中における太陽の位置を太陽の軌道情報から算出する場合、カメラの姿勢(どの方向に向いているか)の情報が利用される。よって、カメラの姿勢の情報に誤差が含まれていると、画面中における計算上の太陽の位置と実際にその画面に写り込んだ太陽の位置とが一致しなくなる。従って、画面上における両者の位置の違いが解消するように、カメラの姿勢を決めるパラメータを探索することで、カメラの姿勢が求められる。
請求項2に記載の発明は、請求項1に記載の発明において、前記カメラの姿勢算出部は、前記差が最小となる条件、前記差が特定の値以下となる条件、および前記差を決める補正量が特定の値に収束する条件の一または複数を用いて前記カメラの前記姿勢を算出することを特徴とする。
請求項3に記載の発明は、請求項1または2に記載の発明において、前記カメラの姿勢算出部は、前記画像に写った前記太陽の方向を規定する第1のベクトルと前記太陽の前記推定位置の方向を規定する第2のベクトルとの差を評価し、前記第2のベクトルは、前記カメラの姿勢の設定値の情報を含んでいることを特徴とする。
請求項4に記載の発明は、カメラが撮影した画像に写った太陽の前記画像の画面上における位置を特定する太陽位置特定ステップと、太陽軌道情報に基づき、前記画像の画面上における前記太陽の推定位置を算出する太陽推定位置算出ステップと、前記太陽位置特定ステップで特定した前記太陽の前記画面上における位置と、前記太陽推定位置算出ステップで算出した前記太陽の前記画面上における前記推定位置との差に基づいて前記カメラの前記姿勢を算出するカメラの姿勢算出ステップとを備えることを特徴とする。
請求項5に記載の発明は、コンピュータに読み取らせて実行させるプログラムであって、コンピュータにカメラが撮影した画像に写った太陽の前記画像の画面上における位置を特定する太陽位置特定ステップと、太陽軌道情報に基づき、前記画像の画面上における前記太陽の推定位置を算出する太陽推定位置算出ステップと、前記太陽位置特定ステップで特定した前記太陽の前記画面上における位置と、前記太陽推定位置算出ステップで算出した前記太陽の前記画面上における前記推定位置との差に基づいて前記カメラの前記姿勢を算出するカメラの姿勢算出ステップとを実行させることを特徴とするカメラのキャリブレーションを行うためのプログラムである。
本発明によれば、MMSにおけるカメラのキャリブレーションを容易に行える技術が提供される。
(概要)
本実施形態では、カメラが撮影した画像に写り込んでいる太陽を利用して当該カメラの姿勢(向き)を求めるキャリブレーションを行う。以下、簡単に原理を説明する。図4には、太陽の方向を撮影した静止画面中における計算上の太陽の画面位置と、実際に写り込んだ太陽の画面位置が示されている。撮影に用いたカメラの姿勢に誤差が含まれていると、計算上の太陽の位置が真値からずれるので、太陽の計算上の位置と実際に写った太陽の位置とにずれが生じる。そこで、カメラの姿勢を規定するパラメータに補正量δを導入し、上記の位置のずれが収束条件(例えば、位置のずれが最少となる)を満たす補正量δを求める。概念的にいうと、複数の画像において図5に示すように計算位置と観測位置にずれがある状態から、図6に示すように計算位置と観測位置にずれがない状態となるように補正量δを繰り返し設定し(言い換えると探索し)、補正量δを真値に追い込んでゆく処理を行う。
本実施形態では、カメラが撮影した画像に写り込んでいる太陽を利用して当該カメラの姿勢(向き)を求めるキャリブレーションを行う。以下、簡単に原理を説明する。図4には、太陽の方向を撮影した静止画面中における計算上の太陽の画面位置と、実際に写り込んだ太陽の画面位置が示されている。撮影に用いたカメラの姿勢に誤差が含まれていると、計算上の太陽の位置が真値からずれるので、太陽の計算上の位置と実際に写った太陽の位置とにずれが生じる。そこで、カメラの姿勢を規定するパラメータに補正量δを導入し、上記の位置のずれが収束条件(例えば、位置のずれが最少となる)を満たす補正量δを求める。概念的にいうと、複数の画像において図5に示すように計算位置と観測位置にずれがある状態から、図6に示すように計算位置と観測位置にずれがない状態となるように補正量δを繰り返し設定し(言い換えると探索し)、補正量δを真値に追い込んでゆく処理を行う。
(構成)
図1には、車両100が示されている。車両100には、アンテナ101、IMU102、演算装置103、およびカメラ104が搭載されている。アンテナ101は、GPS衛星等の航法衛星からの航法信号を受信する。航法信号には、航法信号の発信時刻、航法衛星の軌道情報、航法信号の伝搬時間等の測定に利用されるコード情報等が含まれている。利用する航法衛星は、GPS衛星に限定されず、他の形態の航法衛星であってもよい。航法衛星として、GPSシステムを補完する航法衛星を用いることもできる。この例としては、準天頂衛星システム(Qusai-Zenith Satellite System)で運行される航法衛星が挙げられる。
図1には、車両100が示されている。車両100には、アンテナ101、IMU102、演算装置103、およびカメラ104が搭載されている。アンテナ101は、GPS衛星等の航法衛星からの航法信号を受信する。航法信号には、航法信号の発信時刻、航法衛星の軌道情報、航法信号の伝搬時間等の測定に利用されるコード情報等が含まれている。利用する航法衛星は、GPS衛星に限定されず、他の形態の航法衛星であってもよい。航法衛星として、GPSシステムを補完する航法衛星を用いることもできる。この例としては、準天頂衛星システム(Qusai-Zenith Satellite System)で運行される航法衛星が挙げられる。
IMU(Inertial Measurement Unit)102は、慣性航法装置であり,車両の姿勢の変化、車両に加わる加速度を検出する。演算装置103は、コンピュータとして機能するハードウェアであり、後述する図2に示す構成を有し、また図3に示す処理を行う。カメラ104は、全周カメラであり、上方向も含めて周囲全周(2π空間)の動画を撮影する。全周カメラについては、例えば特開2012−204982号公報や特開2014−71860号公報に記載されている。カメラ104は、特定の時間間隔で連続的に静止画像の撮影を行う。カメラ104が動画を撮影する形態であってもよい。この場合、動画を構成するフレーム画像が静止画像として取り扱われる。
図示省略されているが、車両100には、カメラ104に加えてレーザスキャナが配置されている。カメラ104が撮影した画像とレーザスキャナから得られる三次元点群位置データとを用いて車両100が走行しながら得た周囲環境の三次元データ(例えば、周囲環境の三次元モデルのデータ)が得られる。
ここで、車両100におけるアンテナ101の位置、IMU102の位置と姿勢は予め測定されており、既知である。そして、初期状態において、カメラ104の車両100に対する位置は測定されており、既知であるが、その車両100に対する姿勢は大凡の値が判明している状態であり、誤差を含んでいるものとする。
以下、演算装置103について説明する。演算装置103は、コンピュータとして機能するハードウェアであり、図2に示す各機能部を有する。図2に示す各機能部は、ソフトウェア的に構成されていてもよいし、専用の演算回路によって構成されていてもよい。また、ソフトウェア的に構成された機能部と、専用の演算回路によって構成された機能部が混在していてもよい。例えば、図示する各機能部は、CPU(Central Processing Unit)、ASIC(Application Specific Integrated Circuit)、FPGA(Field Programmable Gate Array)などのPLD(Programmable Logic Device)により構成される。また、演算装置103は、固体電子メモリやハードディスク装置等の記憶装置、各種のインタフェース回路を備えている。
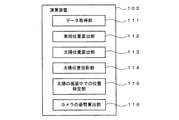
図2には、演算装置103のブロック図が示されている。演算装置103は、データ取得部111、車両位置算出部112、太陽位置算出部113、太陽位置投影部114、太陽の画面中での位置特定部115およびカメラの姿勢算出部116を備えている。データ取得部111は、アンテナ101が受信した航法信号、カメラ104が撮影した画像データを受け付ける。
車両位置算出部112は、アンテナ101が受信したGNSS航法衛星からの航法信号に基づいて車両100の位置を算出する。車両100の位置は、IMU102の位置を基準として計算される。車両100の位置の算出において、GNSSのデータ加えて、各種のビーコン信号を利用することもできる。このGNSSに加えて利用可能なシステムとして、VICS(Vehicle Information and Communication System)(登録商標)が挙げられる。車両の位置と姿勢は、カメラが撮影した動画を用いて算出することもできる。この技術は、例えば特開2013−186816号公報に記載されている。
太陽位置算出部113は、車両100(この場合は、IMU102の位置)から見た天球面上における太陽の位置を算出する。なお、この場合、太陽は無限遠の位置にあると見なせるので、車両100から見てもカメラ102から見ても、天球面上における位置は同じである。太陽の位置は、車両100の位置とその時の時刻が決まれば計算できる。太陽の位置の算出には、専用のプログラムが利用される。天球面上における太陽の軌道情報は、公知の天文情報から得られる。太陽の軌道情報は、例えば、米国ジェット推進研究所のwebサイト(http://www.jpl.nasa.gov/)から入手できる。また、太陽の位置を求める方法に関しては、例えば、日本建築学会東北支部研究報告集 第68号 計画系 出版日:2005年6月10日、(news-sv.aij.or.jp/kankyo/s13/OLDHP/matsu0512.pdf)に記載されている。
太陽位置投影部114は、太陽が写り込んだ画像中に計算により求めた太陽の位置を投影する。カメラの姿勢算出部116は、画像中における計算上の太陽の位置と実際に撮影された太陽の位置との差を利用して、カメラ104の姿勢を求める。太陽の画面中での位置特定部115は、着目している静止画像中に写り込んだ太陽の当該静止画像中での位置(画面位置)を取得する。具体的には、当該静止画像が写った画面における太陽像の座標の情報を取得する。
(処理の一例)
図3には、演算装置103で行われる処理の手順の一例が示されている。図3の処理を実行するためのプログラムは、演算装置103内のメモリや適当な記憶媒体に記憶され、演算装置103によって実行される。まず、時刻tにおける車両100の位置と姿勢の情報を取得する(ステップS101)。この処理は、データ取得部111によって行われる。車両100の位置は、車両位置算出部112が算出した値を用い、車両100の姿勢はIMU102から取得する。また、カメラ104が時刻tに撮影した静止画像の画像データを取得する(ステップS102)。ここで、当該静止画像は、太陽が写り込んだ画像が選択される。また、太陽光の輝度が大きいので適当なフィルタ処理を施し、太陽の位置を明確に取得できるように当該静止画像の明度を調整する。太陽が写り込んだ画像が選択されたら、太陽像の画面中における位置を取得する。この処理は、太陽の画面中での位置特定部115によって行われる。
図3には、演算装置103で行われる処理の手順の一例が示されている。図3の処理を実行するためのプログラムは、演算装置103内のメモリや適当な記憶媒体に記憶され、演算装置103によって実行される。まず、時刻tにおける車両100の位置と姿勢の情報を取得する(ステップS101)。この処理は、データ取得部111によって行われる。車両100の位置は、車両位置算出部112が算出した値を用い、車両100の姿勢はIMU102から取得する。また、カメラ104が時刻tに撮影した静止画像の画像データを取得する(ステップS102)。ここで、当該静止画像は、太陽が写り込んだ画像が選択される。また、太陽光の輝度が大きいので適当なフィルタ処理を施し、太陽の位置を明確に取得できるように当該静止画像の明度を調整する。太陽が写り込んだ画像が選択されたら、太陽像の画面中における位置を取得する。この処理は、太陽の画面中での位置特定部115によって行われる。
次に天球面における太陽の位置を算出する(ステップS103)。この処理は、太陽位置算出部113において行われる。太陽の天球面上における位置から、車両100から見た太陽の方向が判る。太陽の位置をデータベース上から取得する方法、あるいは外部のサーバ等で計算を行い、それを回線経由で取得する方法も可能である。
次にカメラの姿勢の算出を行う(ステップS104)。この処理は、カメラの姿勢算出部116において行われる。以下、ステップS104で行われる処理の詳細を説明する。まず、時刻tにおける車両100の位置をPimu(t)とする。ここで、ステップS101で車両100の姿勢を取得し、ステップS103で車両100から見た太陽の位置が計算されているので、時刻tにおけるIMU(車両)座標系での太陽方向単位ベクトルSt_imu(t)を得ることができる。ここで、IMU(車両)座標系は、IMUの位置を原点として車両に固定され、車両と共に平行移動および回転する。
太陽方向単位ベクトルSt_imu(t)は、時刻tにおけるIMU座標系における計算上の太陽の方向を規定する単位ベクトルである。
また、IMU(車両)座標系におけるカメラ104の位置をT(並進ベクトル)、姿勢をR(回転行列)とする。ここでRはroll,pitch,yawの三成分により決まる。初めの段階では、車両に対するカメラ104の大凡の向きは判るが、厳密な値は判らず、Rはキャリブレーション誤差を含んでいる。このキャリブレーション誤差(真値への補正量)を未知パラメータとする。時刻tにおけるカメラ座標系での計算上の太陽の方向を規定する太陽方向単位ベクトルをSt_cam(t)とすると、数1が成り立つ。太陽方向単位ベクトルSt_cam(t)は、時刻tにおけるカメラ座標系における計算により得られた太陽の方向を規定する単位ベクトルである。カメラ座標系は、カメラ103の位置を原点としてカメラ103に固定された座標系であり、カメラ103と共に平行移動および回転する。
一方、ステップS102で取得したカメラ104が撮像した静止画像への映り込みから当該静止画像中における観測された太陽の位置を特定する。この処理は、太陽の画面中での位置特定部115によって行われる。カメラ座標系は、カメラ104に固定された座標系であるので、上記の静止画像とカメラ座標系との関係は判る。したがって、当該静止画像中における観測された太陽の位置が特定されることで、カメラ座標系における実際に撮影された太陽の方向を規定する太陽方向ベクトルSi_cam(t)を定めることができる。太陽方向ベクトルSi_cam(t)は、時刻tのカメラ座標系における実際に撮影された(観察された)太陽の位置の方向を規定する単位ベクトルである。ここで、St_cam(t)とSi_cam(t)の2ベクトルの差を△Sとすると、数2が成り立つ。
△Sは、着目している静止画像中における太陽の計算上の位置と観測された位置との差を現すパラメータとなる。そして、数1と数2から数3が得られる。
ここで、未知パラメータroll,pitch,yawの初期値(設計値や最初に設定した大凡の値)からの補正量をδroll, δpitch, δyawとすると、下記数4に示す線形化した式が導ける。ここで[]Tは転置を表し、Jはヤコビ行列である。
数4において、b=△S、A=J、x=[δroll, δpitch, δyaw]Tとすると、数5が得られる。
数5が太陽軌道から求めた太陽方向ベクトルと画像への映り込みから求めた太陽方向ベクトルとのベクトル差を評価する観測方程式となる。すなわち、数5は、太陽の軌道データから計算により求めた天球面上における太陽の位置と、実際に観測された天球面上における太陽の位置との差を評価する観測方程式となる。
数5の観測方程式を立てたら、この観測方程式に複数の撮影時刻における各パラメータの値を格納する。例えば、時刻t1、t2、t3、・・・tnにおけるSt_cam(t)とSt_imu(t) が数5の観測方程式に格納される。ここで、選択される時刻の数nは、許容できる範囲でなるべく多い方がよい。その後、下記の手順により正規方程式を得る。まず、数5にAの転置行列ATを左から掛けて数6を得る。
そして、数6にATAの逆行列(ATA)−1を左から掛けて数7(正規方程式)を得る。
数7から、初期値からの補正量であるδroll, δpitch, δyawの最小二乗解が得られる。そして、収束条件が満たされていればその際の補正量δroll, δpitch, δyawを採用し処理を終了する。収束条件が満たされていなければ、下記ステップに進む。収束条件としては、ベクトル差△Sが予め定めた閾値以下となった段階やベクトル差△Sがそれ以上小さくならなくなった段階(最小となった段階)が挙げられる。また、補正量δroll, δpitch, δyawが特定の値に収束した段階を収束条件として採用することもできる。ここで述べた収束条件の複数を組み合わせて用いてもよい。例えば、複数の収束条件のうちの少なくとも一つが満たされた場合の補正値を採用する態様や複数の収束条件のうちの少なくとも二つが満たされた場合の補正値を採用する態様等が可能である。
収束条件が満たされない場合、この時点で得られているδroll, δpitch, δyawを新たな補正量として初期値であるRに加味し、その値を用いて再び太陽軌道から求めた太陽方向ベクトルを生成する。すなわち、この時点で得られているδroll, δpitch, δyawをRの初期値に組み込み、新たなRの初期値を設定し、再度△Sを求め、数4以下の計算を再度行う。この処理のループを収束条件が満たされるまで繰り返し行うことで、より真値に近い補正量(δroll, δpitch, δyaw)を得ることができる。こうして、未知であったRが求まり、車両100に対するカメラ104の姿勢が求められる。通常は、上記の計算のループを繰り返し行い、δroll, δpitch, δyawの値を真値に追い込んでゆく処理が行なわれる。
(優位性)
上記の技術によれば、太陽を標定の基準点として利用することで、車両100に対するカメラ104の姿勢のデータが得られる。この技術では、専用の標定用ターゲットを用いず、また煩雑な作業が必要とされない。そのため、MMSにおけるカメラのキャリブレーションを容易に行える。
上記の技術によれば、太陽を標定の基準点として利用することで、車両100に対するカメラ104の姿勢のデータが得られる。この技術では、専用の標定用ターゲットを用いず、また煩雑な作業が必要とされない。そのため、MMSにおけるカメラのキャリブレーションを容易に行える。
(その他)
本発明は、車両に搭載されたカメラの当該車両に対する姿勢を求める処理に限定されず、航空機や船舶等の移動体に搭載されたカメラに対して適用することもできる。ここで、移動体は、有人であってもよいし無人であってもよい。また、太陽の代わりに月を利用することもできる。この場合、撮影した静止画面上における月軌道情報から得られた計算上の月の投影位置と、実際に写った月の位置とを比較して、上記の太陽を利用する場合と同様の処理を行うことで、移動体におけるカメラの姿勢が求められる。
本発明は、車両に搭載されたカメラの当該車両に対する姿勢を求める処理に限定されず、航空機や船舶等の移動体に搭載されたカメラに対して適用することもできる。ここで、移動体は、有人であってもよいし無人であってもよい。また、太陽の代わりに月を利用することもできる。この場合、撮影した静止画面上における月軌道情報から得られた計算上の月の投影位置と、実際に写った月の位置とを比較して、上記の太陽を利用する場合と同様の処理を行うことで、移動体におけるカメラの姿勢が求められる。
Claims (5)
- カメラが撮影した画像に写った太陽の前記画像の画面上における位置を特定する太陽位置特定部と、
太陽軌道情報に基づき、前記画像の画面上における前記太陽の推定位置を算出する太陽推定位置算出部と、
前記太陽位置特定部が特定した前記太陽の前記画面上における位置と、前記太陽推定位置算出部が算出した前記太陽の前記画面上における前記推定位置との差に基づいて前記カメラの前記姿勢を算出するカメラの姿勢算出部と
を備えることを特徴とするカメラのキャリブレーション装置。 - 前記カメラの姿勢算出部は、前記差が最小となる条件、前記差が特定の値以下となる条件、および前記差を決める補正量が特定の値に収束する条件の一または複数を用いて前記カメラの前記姿勢を算出することを特徴とする請求項1に記載のカメラのキャリブレーション装置。
- 前記カメラの姿勢算出部は、
前記画像に写った前記太陽の方向を規定する第1のベクトルと前記太陽の前記推定位置の方向を規定する第2のベクトルとの差を評価し、
前記第2のベクトルは、前記カメラの姿勢の設定値の情報を含んでいることを特徴とする請求項1または2に記載のカメラのキャリブレーション装置。 - カメラが撮影した画像に写った太陽の前記画像の画面上における位置を特定する太陽位置特定ステップと、
太陽軌道情報に基づき、前記画像の画面上における前記太陽の推定位置を算出する太陽推定位置算出ステップと、
前記太陽位置特定ステップで特定した前記太陽の前記画面上における位置と、前記太陽推定位置算出ステップで算出した前記太陽の前記画面上における前記推定位置との差に基づいて前記カメラの前記姿勢を算出するカメラの姿勢算出ステップと
を備えることを特徴とするカメラのキャリブレーション方法。 - コンピュータに読み取らせて実行させるプログラムであって、
コンピュータに
カメラが撮影した画像に写った太陽の前記画像の画面上における位置を特定する太陽位置特定ステップと、
太陽軌道情報に基づき、前記画像の画面上における前記太陽の推定位置を算出する太陽推定位置算出ステップと、
前記太陽位置特定ステップで特定した前記太陽の前記画面上における位置と、前記太陽推定位置算出ステップで算出した前記太陽の前記画面上における前記推定位置との差に基づいて前記カメラの前記姿勢を算出するカメラの姿勢算出ステップと
を実行させることを特徴とするカメラのキャリブレーションを行うためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015128494A JP2017009555A (ja) | 2015-06-26 | 2015-06-26 | カメラのキャリブレーション装置、カメラのキャリブレーション方法およびカメラのキャリブレーションを行うためのプログラム |
| US15/172,935 US20160379365A1 (en) | 2015-06-26 | 2016-06-03 | Camera calibration device, camera calibration method, and camera calibration program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015128494A JP2017009555A (ja) | 2015-06-26 | 2015-06-26 | カメラのキャリブレーション装置、カメラのキャリブレーション方法およびカメラのキャリブレーションを行うためのプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017009555A true JP2017009555A (ja) | 2017-01-12 |
Family
ID=57602650
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015128494A Pending JP2017009555A (ja) | 2015-06-26 | 2015-06-26 | カメラのキャリブレーション装置、カメラのキャリブレーション方法およびカメラのキャリブレーションを行うためのプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20160379365A1 (ja) |
| JP (1) | JP2017009555A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109741384A (zh) * | 2018-12-18 | 2019-05-10 | 深圳奥比中光科技有限公司 | 深度相机的多距离检测装置及方法 |
| KR20190086951A (ko) * | 2018-01-15 | 2019-07-24 | 주식회사 스트리스 | 레이저 관측 장비를 이용한 mms의 캘리브레이션을 위한 장치 및 방법 |
| JPWO2019116784A1 (ja) * | 2017-12-12 | 2020-12-17 | ソニー株式会社 | 情報処理装置、移動体、制御システム、情報処理方法及びプログラム |
| JP2023137353A (ja) * | 2022-03-18 | 2023-09-29 | 株式会社トプコン | 測量装置、測量方法および測量用プログラム |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109828292A (zh) * | 2019-02-14 | 2019-05-31 | 上海卫星工程研究所 | 基于空间相机的可驱动天线标定方法 |
| CN110378968B (zh) * | 2019-06-24 | 2022-01-14 | 奥比中光科技集团股份有限公司 | 相机和惯性测量单元相对姿态的标定方法及装置 |
| CN113589343B (zh) * | 2021-07-19 | 2023-07-25 | 中国科学院微小卫星创新研究院 | 一种基于月球成像敏感器的月心矢量和太阳方向提取方法 |
| CN114440885B (zh) * | 2021-12-24 | 2023-10-13 | 中国人民解放军战略支援部队信息工程大学 | 一种静止轨道遥感卫星定位方法及装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3034807B2 (ja) * | 1996-08-30 | 2000-04-17 | 三菱電機株式会社 | 人工衛星の姿勢決定装置 |
| KR100761011B1 (ko) * | 2006-05-30 | 2007-09-21 | 학교법인 인하학원 | 카메라형 태양센서를 이용한 관성항법시스템의자세보정장치 및 방법 |
| JP6058963B2 (ja) * | 2012-10-02 | 2017-01-11 | 株式会社トプコン | 全周カメラ |
-
2015
- 2015-06-26 JP JP2015128494A patent/JP2017009555A/ja active Pending
-
2016
- 2016-06-03 US US15/172,935 patent/US20160379365A1/en not_active Abandoned
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019116784A1 (ja) * | 2017-12-12 | 2020-12-17 | ソニー株式会社 | 情報処理装置、移動体、制御システム、情報処理方法及びプログラム |
| US11698642B2 (en) | 2017-12-12 | 2023-07-11 | Sony Corporation | Information processing apparatus, mobile object, control system, and information processing method |
| KR20190086951A (ko) * | 2018-01-15 | 2019-07-24 | 주식회사 스트리스 | 레이저 관측 장비를 이용한 mms의 캘리브레이션을 위한 장치 및 방법 |
| KR102167847B1 (ko) * | 2018-01-15 | 2020-10-20 | 주식회사 스트리스 | 레이저 관측 장비를 이용한 mms의 캘리브레이션을 위한 장치 및 방법 |
| CN109741384A (zh) * | 2018-12-18 | 2019-05-10 | 深圳奥比中光科技有限公司 | 深度相机的多距离检测装置及方法 |
| JP2023137353A (ja) * | 2022-03-18 | 2023-09-29 | 株式会社トプコン | 測量装置、測量方法および測量用プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160379365A1 (en) | 2016-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017009555A (ja) | カメラのキャリブレーション装置、カメラのキャリブレーション方法およびカメラのキャリブレーションを行うためのプログラム | |
| US11099030B2 (en) | Attitude estimation apparatus, attitude estimation method, and observation system | |
| US10295365B2 (en) | State estimation for aerial vehicles using multi-sensor fusion | |
| JP6442193B2 (ja) | 点群位置データ処理装置、点群位置データ処理システム、点群位置データ処理方法およびプログラム | |
| US11372455B2 (en) | Imaging sensor-based position detection | |
| CN110969665B (zh) | 一种外参标定方法、装置、系统及机器人 | |
| US10353072B2 (en) | Laser scanner controlling device, laser scanner controlling method, and laser scanner controlling program | |
| CN112985391B (zh) | 一种基于惯性和双目视觉的多无人机协同导航方法和装置 | |
| EP4220086A1 (en) | Combined navigation system initialization method and apparatus, medium, and electronic device | |
| US9916659B2 (en) | Operating device, operating method, and program therefor | |
| JP2016057108A (ja) | 演算装置、演算システム、演算方法およびプログラム | |
| CN113820735A (zh) | 位置信息的确定方法、位置测量设备、终端及存储介质 | |
| JP2016048172A (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| US20180321352A1 (en) | Pose Estimation Using Radio Frequency Identification (RFID) Tags | |
| WO2018020659A1 (ja) | 移動体、移動体制御方法、移動体制御システム、及び移動体制御プログラム | |
| US10612937B2 (en) | Information processing device and method | |
| CN111247389A (zh) | 关于拍摄设备的数据处理方法、装置及图像处理设备 | |
| JP2019120587A (ja) | 測位システム及び測位方法 | |
| KR101821992B1 (ko) | 무인비행체를 이용한 목표물의 3차원 위치 산출 방법 및 장치 | |
| CN110800023A (zh) | 图像处理方法和设备、摄像装置以及无人机 | |
| CN118936478A (zh) | 多源数据融合的定位定姿方法、装置和巡检系统 | |
| CN114577203A (zh) | 个人导航装置、导航系统及相关方法 | |
| CN104913775A (zh) | 无人机对地高度的测量方法、无人机定位方法及装置 | |
| CN112649001B (zh) | 一种小型无人机姿态与位置解算方法 | |
| KR101878253B1 (ko) | 자세 및 방위각 측정장치의 지자기센서 신호처리 방법 |