JP2017013527A - 車線逸脱抑制装置 - Google Patents
車線逸脱抑制装置 Download PDFInfo
- Publication number
- JP2017013527A JP2017013527A JP2015129177A JP2015129177A JP2017013527A JP 2017013527 A JP2017013527 A JP 2017013527A JP 2015129177 A JP2015129177 A JP 2015129177A JP 2015129177 A JP2015129177 A JP 2015129177A JP 2017013527 A JP2017013527 A JP 2017013527A
- Authority
- JP
- Japan
- Prior art keywords
- torque
- steering torque
- driver
- control
- automatic steering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/08—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/085—Changing the parameters of the control units, e.g. changing limit values, working points by control input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
- B60W2050/0083—Setting, resetting, calibration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/20—Steering systems
- B60W2510/202—Steering torque
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
ドライバが車両のステアリングに入力するトルクであるドライバ操舵トルクを検出するドライバ操舵トルク検出部(71)と、
ドライバのステアリング操作が急操作であることを判断するための第1キャンセル閾値、および、第1キャンセル閾値よりも低い第2キャンセル閾値と、ドライバ操舵トルク検出部が検出したドライバ操舵トルクとの比較に基づいて、自動操舵トルクをゼロとするか否かを判定する制御中止判定部(72)とを備え、
トルク制御部は、
制御中止判定部が自動操舵トルクをゼロとすると判定した場合には予め設定されたトルク変化パターンで自動操舵トルクをゼロとするようにトルク制御信号を出力し、
ドライバ操舵トルクが第1キャンセル閾値以上である場合、トルク変化パターンを、即座に自動操舵トルクをゼロにするパターンとし、
ドライバ操舵トルクが第1キャンセル閾値よりも低いが第2キャンセル閾値以上である場合、トルク変化パターンを、自動操舵トルクを漸減させるパターンとすることを特徴とする車線逸脱抑制装置である。
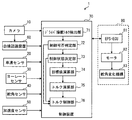
以下、本発明の実施形態を図面に基づいて説明する。図1に示す車線逸脱抑制システム1は、図1に示すように、カメラ10、車速センサ20、ヨーレートセンサ30、舵角センサ40、加速度センサ50、白線認識装置60、制御装置70を備える。制御装置70は、本発明の車線逸脱抑制装置である。この車線逸脱抑制システム1は、電動パワーステアリングシステム80とともに、図示しない車両に搭載される。以下、この車線逸脱抑制システム1が搭載されている車両を自車両という。
次に、制御装置70の機能について説明する。ドライバ操舵トルク検出部71は、EPS−ECU81から操舵トルクを取得する。そして、操舵トルクに基づいて、ドライバがステアリングに入力するトルクであるドライバ操舵トルクを周期的に決定する。
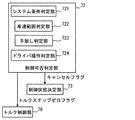
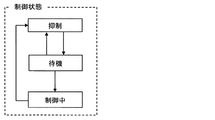
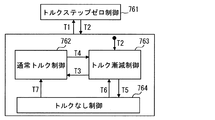
本実施形態では、制御可否判定部72は、ドライバのステアリング操作が急操作であることを判断するためのトルク閾値N4を備える判定条件が成立した場合には、トルクステップゼロフラグをオンにして(S5)、制御状態を抑制状態とする(S6)。トルクステップゼロフラグがオンである場合、トルク制御部76は、トルクステップゼロ制御761を実行して、即座に自動操舵トルクをゼロにするトルク変化パターンのトルク制御信号を出力する。
次に、第2実施形態を説明する。この第2実施形態以下の説明において、それまでに使用した符号と同一番号の符号を有する要素は、特に言及する場合を除き、それ以前の実施形態における同一符号の要素と同一である。また、構成の一部のみを説明している場合、構成の他の部分については先に説明した実施形態を適用できる。
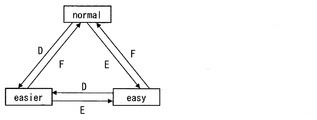
たとえば、前述の実施形態では、トルクモードを3つに区分していたが、easy、easierは、互いに判定条件が同じであるので、実質的には、トルクモードを2つに区分していたことになる。しかし、トルクモードを、実質的に判定条件が異なる3つ以上のモードに区分してもよい。
Claims (4)
- 車両が、走行中の車線から逸脱することを抑制するための自動操舵トルクをアクチュエータに発生させることを指示するトルク制御信号を出力するトルク制御部(76)と、
ドライバが前記車両のステアリングに入力するトルクであるドライバ操舵トルクを検出するドライバ操舵トルク検出部(71)と、
前記ドライバのステアリング操作が急操作であることを判断するための第1キャンセル閾値、および、前記第1キャンセル閾値よりも低い第2キャンセル閾値と、前記ドライバ操舵トルク検出部が検出した前記ドライバ操舵トルクとの比較に基づいて、前記自動操舵トルクをゼロとするか否かを判定する制御中止判定部(72)とを備え、
前記トルク制御部は、
前記制御中止判定部が前記自動操舵トルクをゼロとすると判定した場合には予め設定されたトルク変化パターンで前記自動操舵トルクをゼロとするように前記トルク制御信号を出力し、
前記ドライバ操舵トルクが前記第1キャンセル閾値以上である場合、前記トルク変化パターンを、即座に前記自動操舵トルクをゼロにするパターンとし、
前記ドライバ操舵トルクが前記第1キャンセル閾値よりも低いが前記第2キャンセル閾値以上である場合、前記トルク変化パターンを、前記自動操舵トルクを漸減させるパターンとすることを特徴とする車線逸脱抑制装置。 - 請求項1において、
前記制御中止判定部は、
前記ドライバ操舵トルクの方向が前記自動操舵トルクの方向と同方向である場合には、前記第1キャンセル閾値と前記ドライバ操舵トルクとの比較に基づいて、前記自動操舵トルクをゼロとするか否かを判定し、
前記ドライバ操舵トルクの方向が前記自動操舵トルクの方向と逆方向である場合には、前記第1キャンセル閾値および前記第2キャンセル閾値と、前記ドライバ操舵トルクとの比較に基づいて、前記自動操舵トルクをゼロとするか否かを判定することを特徴とする車線逸脱抑制装置。 - 請求項2において、
前記制御中止判定部は、
前記ドライバ操舵トルクが前記第1キャンセル閾値を超えている時間が予め設定された第1キャンセル時間を超えたか否か、および、前記ドライバ操舵トルクが前記第2キャンセル閾値を超えている時間が予め設定された第2キャンセル時間を超えたか否かに基づいて、前記自動操舵トルクをゼロとするか否かを判定するようになっており、
前記車両が車線を逸脱してしまう可能性、および、前記車両が車線変更する可能性の少なくとも一方を判断するための予め設定されたモード選択条件に基づいて、前記自動操舵トルクのキャンセル容易性が異なる複数のモードから一つのモードを選択し、
選択した前記モードが、前記自動操舵トルクのキャンセルが相対的に容易であるモードである場合、前記第2キャンセル閾値および前記第2キャンセル時間の少なくとも一方を、前記モードが、前記自動操舵トルクのキャンセルが相対的に容易でないモードである場合よりも、前記自動操舵トルクをゼロとする判定がされやすい値とすることを特徴とする車線逸脱抑制装置。 - 請求項1〜3のいずれか1項において、
前記トルク制御部は、前記トルク変化パターンを、前記自動操舵トルクを漸減させるパターンとする場合であって、前記車両が直線道路を走行中であると判定した場合には、前記車両がカーブ道路を走行中であると判定した場合よりも、前記自動操舵トルクが緩やかに漸減する前記トルク変化パターンとすることを特徴とする車線逸脱抑制装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015129177A JP6332168B2 (ja) | 2015-06-26 | 2015-06-26 | 車線逸脱抑制装置 |
| DE112016002910.1T DE112016002910B4 (de) | 2015-06-26 | 2016-06-20 | Spurhaltevorrichtung |
| US15/739,668 US10081358B2 (en) | 2015-06-26 | 2016-06-20 | Lane departure prevention apparatus |
| CN201680036921.0A CN107735309B (zh) | 2015-06-26 | 2016-06-20 | 车道脱离抑制装置 |
| PCT/JP2016/068293 WO2016208545A1 (ja) | 2015-06-26 | 2016-06-20 | 車線逸脱抑制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015129177A JP6332168B2 (ja) | 2015-06-26 | 2015-06-26 | 車線逸脱抑制装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017013527A true JP2017013527A (ja) | 2017-01-19 |
| JP2017013527A5 JP2017013527A5 (ja) | 2017-07-27 |
| JP6332168B2 JP6332168B2 (ja) | 2018-05-30 |
Family
ID=57585932
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015129177A Active JP6332168B2 (ja) | 2015-06-26 | 2015-06-26 | 車線逸脱抑制装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10081358B2 (ja) |
| JP (1) | JP6332168B2 (ja) |
| CN (1) | CN107735309B (ja) |
| DE (1) | DE112016002910B4 (ja) |
| WO (1) | WO2016208545A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018144691A (ja) * | 2017-03-07 | 2018-09-20 | 本田技研工業株式会社 | 運転支援装置 |
| JP2020006768A (ja) * | 2018-07-05 | 2020-01-16 | トヨタ自動車株式会社 | 車両走行支援装置 |
| JP2021142955A (ja) * | 2020-03-13 | 2021-09-24 | 本田技研工業株式会社 | 車両制御装置および車両 |
| KR20240001726A (ko) * | 2022-06-23 | 2024-01-04 | 한국자동차연구원 | 차선 유지 제어 장치와 그 방법 |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6790558B2 (ja) * | 2016-08-02 | 2020-11-25 | いすゞ自動車株式会社 | 補助力制御装置及び補助力制御方法 |
| EP3489113A4 (en) * | 2016-10-14 | 2019-10-09 | NSK Ltd. | ELECTRIC POWER STEERING DEVICE |
| US10821881B2 (en) * | 2017-07-05 | 2020-11-03 | Ford Global Technologies, Llc | Determining a steering angle for an automobile application |
| JP6834858B2 (ja) * | 2017-09-04 | 2021-02-24 | トヨタ自動車株式会社 | 操舵支援装置 |
| JP6568559B2 (ja) * | 2017-09-13 | 2019-08-28 | 株式会社Subaru | 車両の走行制御装置 |
| US20190185012A1 (en) | 2017-12-18 | 2019-06-20 | PlusAI Corp | Method and system for personalized motion planning in autonomous driving vehicles |
| US11130497B2 (en) * | 2017-12-18 | 2021-09-28 | Plusai Limited | Method and system for ensemble vehicle control prediction in autonomous driving vehicles |
| US11273836B2 (en) | 2017-12-18 | 2022-03-15 | Plusai, Inc. | Method and system for human-like driving lane planning in autonomous driving vehicles |
| JP2019119298A (ja) * | 2017-12-28 | 2019-07-22 | 本田技研工業株式会社 | 車両用制御装置 |
| US11351989B2 (en) | 2018-04-11 | 2022-06-07 | Hyundai Motor Company | Vehicle driving controller, system including the same, and method thereof |
| EP3569460B1 (en) * | 2018-04-11 | 2024-03-20 | Hyundai Motor Company | Apparatus and method for controlling driving in vehicle |
| GB2579192B (en) * | 2018-11-22 | 2021-06-23 | Jaguar Land Rover Ltd | Steering assist method and apparatus |
| CN110239532B (zh) * | 2019-05-20 | 2020-12-01 | 浙江吉利控股集团有限公司 | 一种车辆变道辅助方法、装置、终端及存储介质 |
| CN112046478B (zh) * | 2019-06-06 | 2024-04-26 | 本田技研工业株式会社 | 车辆控制装置及其动作方法、车辆以及存储介质 |
| CN110356395A (zh) * | 2019-06-25 | 2019-10-22 | 武汉格罗夫氢能汽车有限公司 | 一种车辆车道保持方法、设备及存储设备 |
| US11945447B2 (en) * | 2020-02-13 | 2024-04-02 | Toyota Motor North America, Inc. | Transport boundary expansion |
| US11772672B2 (en) | 2020-02-13 | 2023-10-03 | Toyota Motor North America, Inc. | Unsafe transport operation |
| JP7669965B2 (ja) * | 2022-04-04 | 2025-04-30 | トヨタ自動車株式会社 | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 |
| CN117125133A (zh) * | 2022-05-20 | 2023-11-28 | 比亚迪股份有限公司 | 后驱车辆转向控制方法、系统、控制器及车辆 |
| CN116142168B (zh) * | 2023-02-27 | 2025-08-29 | 长城汽车股份有限公司 | 一种自动驾驶横向运动控制接管方法、装置、系统和车辆 |
| CN119239764B (zh) * | 2024-09-03 | 2025-11-07 | 广州汽车集团股份有限公司 | 车辆的控制方法、装置、车辆及存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1178940A (ja) * | 1997-09-05 | 1999-03-23 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JPH11198839A (ja) * | 1998-01-14 | 1999-07-27 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JP2015020719A (ja) * | 2013-07-23 | 2015-02-02 | 株式会社デンソー | 車線維持支援装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4730406B2 (ja) * | 2008-07-11 | 2011-07-20 | トヨタ自動車株式会社 | 走行支援制御装置 |
| JP2015003566A (ja) | 2013-06-19 | 2015-01-08 | トヨタ自動車株式会社 | 逸脱防止装置 |
| JP6213033B2 (ja) | 2013-08-09 | 2017-10-18 | 株式会社デンソー | モータ制御装置 |
| KR102112486B1 (ko) * | 2013-11-21 | 2020-06-04 | 현대모비스 주식회사 | 차선 종류에 따른 차선 유지 제어 장치 및 방법 |
-
2015
- 2015-06-26 JP JP2015129177A patent/JP6332168B2/ja active Active
-
2016
- 2016-06-20 WO PCT/JP2016/068293 patent/WO2016208545A1/ja not_active Ceased
- 2016-06-20 CN CN201680036921.0A patent/CN107735309B/zh active Active
- 2016-06-20 DE DE112016002910.1T patent/DE112016002910B4/de active Active
- 2016-06-20 US US15/739,668 patent/US10081358B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1178940A (ja) * | 1997-09-05 | 1999-03-23 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JPH11198839A (ja) * | 1998-01-14 | 1999-07-27 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JP2015020719A (ja) * | 2013-07-23 | 2015-02-02 | 株式会社デンソー | 車線維持支援装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018144691A (ja) * | 2017-03-07 | 2018-09-20 | 本田技研工業株式会社 | 運転支援装置 |
| US11124236B2 (en) | 2017-03-07 | 2021-09-21 | Honda Motor Co., Ltd. | Drive assist apparatus |
| JP2020006768A (ja) * | 2018-07-05 | 2020-01-16 | トヨタ自動車株式会社 | 車両走行支援装置 |
| JP2021142955A (ja) * | 2020-03-13 | 2021-09-24 | 本田技研工業株式会社 | 車両制御装置および車両 |
| JP7037593B2 (ja) | 2020-03-13 | 2022-03-16 | 本田技研工業株式会社 | 車両制御装置および車両 |
| US11685438B2 (en) | 2020-03-13 | 2023-06-27 | Honda Motor Co., Ltd. | Vehicle control apparatus and vehicle |
| KR20240001726A (ko) * | 2022-06-23 | 2024-01-04 | 한국자동차연구원 | 차선 유지 제어 장치와 그 방법 |
| KR102766160B1 (ko) * | 2022-06-23 | 2025-02-12 | 한국자동차연구원 | 차선 유지 제어 장치와 그 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112016002910B4 (de) | 2022-11-03 |
| JP6332168B2 (ja) | 2018-05-30 |
| CN107735309A (zh) | 2018-02-23 |
| DE112016002910T5 (de) | 2018-03-08 |
| US10081358B2 (en) | 2018-09-25 |
| US20180186372A1 (en) | 2018-07-05 |
| WO2016208545A1 (ja) | 2016-12-29 |
| CN107735309B (zh) | 2019-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6332168B2 (ja) | 車線逸脱抑制装置 | |
| JP5880717B2 (ja) | 衝突回避支援装置及び衝突回避支援方法 | |
| JP6372430B2 (ja) | 車線逸脱抑制装置 | |
| JP5808977B2 (ja) | 車両のヨーモーメント発生旋回効率化装置 | |
| JP6384495B2 (ja) | 追い越し支援装置 | |
| JPWO2014064805A1 (ja) | 車両用走行支援装置 | |
| US12202479B2 (en) | Vehicle control device | |
| JP2009040267A (ja) | 走行制御装置 | |
| WO2020196053A1 (ja) | 運転引継装置 | |
| JP5029556B2 (ja) | 車間距離制御装置 | |
| JP2004114954A (ja) | 車両用運転操作補助装置 | |
| EP3552915B1 (en) | Apparatus and method for providing safety strategy in vehicle | |
| JP6372663B2 (ja) | 車両の制御装置 | |
| JP2019119298A (ja) | 車両用制御装置 | |
| CN116438104A (zh) | 车辆运动控制方法及车辆运动控制装置 | |
| JP2020158032A (ja) | 自動運転システム | |
| JP6313834B2 (ja) | 車両制御装置 | |
| JP6354656B2 (ja) | 車両位置制御装置 | |
| EP4501727A1 (en) | Control device and control method for saddle riding type vehicle | |
| CN115195734B (zh) | 行驶控制装置 | |
| WO2024147071A1 (ja) | 制御装置及び制御方法 | |
| JP2023087425A (ja) | 運転支援装置 | |
| JP6423190B2 (ja) | 車両の挙動制御装置及び車両の挙動制御方法 | |
| EP4501720A1 (en) | Saddled vehicle behavior control device and control method | |
| JP2007046525A (ja) | 車両走行制御装置および車両走行制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170615 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180403 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180416 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6332168 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |