JP2017014836A - 作業機械の作業分析システム - Google Patents
作業機械の作業分析システム Download PDFInfo
- Publication number
- JP2017014836A JP2017014836A JP2015134326A JP2015134326A JP2017014836A JP 2017014836 A JP2017014836 A JP 2017014836A JP 2015134326 A JP2015134326 A JP 2015134326A JP 2015134326 A JP2015134326 A JP 2015134326A JP 2017014836 A JP2017014836 A JP 2017014836A
- Authority
- JP
- Japan
- Prior art keywords
- excavation
- order
- work
- analysis system
- row
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Operation Control Of Excavators (AREA)
- Component Parts Of Construction Machinery (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
【課題】本発明は、ショベルによる掘削順序を改善し、作業効率を向上することができる作業分析システムを提供することを目的とする。【解決手段】走行機能を有する下部走行体に対して旋回動作が可能な上部旋回体にバケットを含む作業装置を搭載して掘削作業を行うショベルの作業分析システムにおいて、切羽の一列を掘削する列掘削サイクルにおける掘削順序を認識する掘削順序認識部41と、掘削順序認識部41により認識された掘削順序の発生回数に基づいて掘削順序の評価指標を生成する掘削順序評価部42と、掘削順序評価部42により生成された評価指標を表示する表示装置50とを備える。【選択図】 図1
Description
本発明は、作業機械の作業分析システムに関し、特に、掘削積込み作業における掘削順序の認識および可視化が可能な作業分析システムに関する。
米国特許第7751954号明細書(特許文献1)には、運転者に効率的な運転操作を行うようにアドバイスする建設機械の運転システムが記載されている。特許文献1のシステムでは、建設機械の運転状況に関する所定状態値(例えば油圧又はエンジン回転数等)が検出され、その状態値の所定時間区間ごとの頻度分布が計算される。状態値の可変範囲は予め複数の領域に分けられており、領域ごとに異なる設定目標値が予め設定されている。このシステムは、領域ごとに、所定状態値の頻度分布と設定目標値とを比較し、比較結果に応じて、予め用意してあるメッセージを出力する。
ショベル等の掘削積込み作業を行う作業機械は、鉱山における採掘作業や、建設土木工事における整地作業等に使用される。ショベルを用いて、土砂を効率良く掘削搬出するための工法として、ベンチカット工法が知られている。ベンチカット工法では、ベンチと呼ばれる階段状の地形を形成し、ショベルはベンチの上に乗って、ベンチの縁に沿って移動しつつ足元の切羽の土砂を掘削し、下の段に停車したダンプトラックの荷台に土砂を積込む作業を行う。
ショベルによる土砂の掘削積込みの効率を高めるには、掘削する順序を適切に選択することが重要である。ベンチカット工法では、ベンチの端から一定の幅で土砂を掘削して行くが、幅方向に対してどの位置を先に掘削するかによって、作業の効率が影響される。
従来、掘削順序はショベルのオペレータの経験によって選択されており、実際に行われている作業の掘削順序の分析及び管理は行われていなかった。掘削順序は、過去数回の掘削を含む作業の履歴によって決まる作業特性である。従って、油圧圧力やエンジン回転数等の状態値と異なり、センサ等を用いて直接に検出することができない。このため、計測データから掘削順序を認識する適当な手法がなかった。
特許文献1のシステムでは、建設機械の運転状況に関する所定状態値(例えば油圧又はエンジン回転数等)が検出され、その状態値の所定時間区間ごとの頻度分布を評価している。しかし、掘削順序を評価することについては配慮されていない。
ショベル(作業機械)から得られる情報を基に、掘削順序を認識して可視化し、結果をオペレータや、管理・監督者に提示すれば、作業効率を高めるための気づきを与えることができる。そしてオペレータや管理・監督者は、作業方法を改善することによって、作業効率を高めることができる。
本発明は、ショベルによる掘削順序を改善し、掘削作業の効率を向上することができる作業分析システムを提供することを目的とする。
上記課題を解決するために本発明の作業分析システムは、走行機能を有する下部走行体に対して旋回動作が可能な上部旋回体にバケットを含む作業装置を搭載して掘削作業を行うショベルの作業分析システムにおいて、切羽の一列を掘削する列掘削サイクルにおける掘削順序を認識する掘削順序認識部と、前記掘削順序認識部により認識された掘削順序の発生回数に基づいて、掘削順序の評価指標を生成する掘削順序評価部と、前記掘削順序評価部により生成された前記評価指標を表示する表示装置とを備える。
本発明により、掘削順序の分析および可視化が可能となり、オペレータや管理・監督者に掘削順序を改善する気づきを与えることができる。これにより、掘削作業の効率を向上することができる。
上記した以外の課題、構成及び効果は以下の実施形態の説明により明らかにされる。
以下、図面等を用いて、本発明の実施形態について説明する。以下の説明は本発明の内容の具体例を示すものであり、本発明がこれらの説明に限定されるものではなく、本明細書に開示される技術的思想の範囲内において当業者による様々な変更および修正が可能である。また、本発明を説明するための全図において、同一の機能を有するものは、同一の符号を付け、その繰り返しの説明は省略する場合がある。
図2は、本発明の一実施例に係るショベルの側面図である。ここでは、ショベル(作業機械)は、油圧により駆動される油圧ショベルの例を示している。
ショベル1は、クローラ11による走行機能を有する下部走行体10と、走行部に対して旋回動作が可能な上部旋回体20とを備えている。クローラ11は走行油圧モータ12により駆動される。上部旋回体20は、旋回油圧モータ21により駆動される。上部旋回体20には、ブーム31、アーム32及びバケット33からなる作業装置30が備えられている。作業装置30は、油圧シリンダ34、35及び36により駆動される。
ショベル1のオペレータは、運転席22に搭乗し、操作レバー23を操作して、下部走行体10の走行動作、上部旋回体20の旋回動作及び作業装置30の動作を制御して作業を行う。
ショベル1には、掘削順序を認識する分析装置40と、分析結果を可視化する表示装置50が備えられている。
図3は、本発明の一実施例に係るショベルの作業環境を示す斜視図である。図3では、ベンチカット工法におけるショベル1とベンチ60とダンプトラック2との位置関係を示している。なお、図3では、ショベル1とベンチ60とダンプトラック2との寸法関係(大小関係)は必ずしも正確ではない。
ショベル1は、ベンチ60の上に乗っており、ベンチ60の端の切羽61の土砂を作業装置30で掘削し、上部旋回体20を旋回してダンプトラック2に積込む作業を行う。切羽61の幅は、バケット33の幅よりも大きいため、ショベル1は、旋回角度を変えることによって、切羽の幅方向62に対して掘削場所を変えて、複数回の掘削を行うことにより、切刃61の全幅の一列の土砂を掘削する。その後、ショベル1はベンチの縁64に沿って掘削方向63に後退移動し、切羽61の掘削を繰り返す。以下、この切羽61の全幅の一列の掘削のサイクルを、列掘削サイクルと呼ぶ。
図4は、本発明の一実施例に係る掘削順序を模式的に説明するベンチの上面図である。この図は、掘削順序の概念を説明するために、ベンチ60の上面を上方から見た図であり、切羽の幅方向62を図の横向きに、掘削方向63を図の縦向きに示している。ショベル1(図示されていない)の移動方向は図の下向きとなる。切羽61は横向きの直線で、ベンチ60の縁は縦向きの直線で模式的に示されている。
ショベル1が切羽61を4回で掘削すると、ショベル1は、切羽61を61A,61B,61C,61Dのように分割して掘削することになる。この分割掘削の順序が掘削順序である。
一般的には、切羽の角は他の場所よりも掘削の抵抗が小さいため、61Aから掘削する方が有利と考えられるが、ショベル1のバケット33が横向き(この場合左向き)に押されるため操作がしにくい面もある。最も操作がしやすく、短時間で、効率良く掘削できる順序は、土砂の固さ等の様々な環境条件に依存する。熟練したオペレータは、それぞれの環境条件に応じた最適な掘削順序を経験によって選択して作業している。逆に、適切な順序で掘削しなければ、作業時間が長くなり生産性が低下する。
上記の掘削順序を車体データから認識し、可視化してオペレータや管理者・監督者に提示することにより、作業方法を改善するための気づきを与えるシステムを提供することが本発明の狙いである。
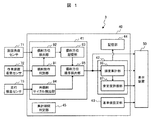
図1を参照して、本実施例に係る作業分析システム3の構成について説明する。図1は、本発明の一実施例に係る分析システムの構成を示すブロック図である。
分析装置40は、掘削順序認識部41と、掘削順序評価部42と、基準値設定部43とを備えている。分析装置40は、ショベル1に搭載された旋回角度センサ71、作業装置姿勢センサ72及び走行検出センサ73の出力を入力し、表示装置50に掘削順序の認識結果及びその評価結果を出力する。
ここで、旋回角度センサ71は、ポテンショメータ等により下部走行体10に対する上部旋回体20の旋回角度を検出するものである。作業装置姿勢センサ72は、ポテンショメータ等により、ブーム31、アーム32及びバケット33の角度を検出するものである。走行検出センサ73は、走行操作レバーの操作量等により、走行が行われたことを検知するものである。
分析装置40は、センサ71、72、73からの入力と表示装置50への出力の機能を有する計算機で構成されており、その内部の機能要素はソフトウェアにより実現されている。
以下、分析装置40の掘削順序認識部41の内部要素を説明する。掘削順序認識部41は、掘削動作判別部81と、掘削方位検出部82と、掘削方位記憶部83と、列掘削サイクル検出部84と、掘削方位順序認識部85とを有する。
掘削動作判別部81は、作業装置姿勢センサ72の出力に基づいて、作業装置30の動作を分析し、掘削を開始したタイミングを検出する。掘削動作判別部81は、例えば、バケット33が所定の角度(姿勢)になると、掘削を開始したものと判断する。この場合、掘削開始を判断するために、バケット33の一連の動作(姿勢)を実現する複数の角度を設定してもよい。
掘削方位検出部82は、掘削を開始したタイミングの旋回角度センサ71の値を抽出することで掘削方位を検出する。掘削方位記憶部83は、掘削方位検出部82が検出した掘削方位を記録する。掘削方位は、旋回油圧モータ21の動作量により検出するようにしてもよい。
列掘削サイクル検出部84は、走行検出センサ73の出力に基づいて、走行が行われた時に、切羽61の全幅の掘削が終了してその回の列掘削サイクルが完了したと判断する。列掘削サイクルの完了を判断する走行距離に閾値を設けてもよい。そして、走行距離が閾値を超えた場合に、列掘削サイクルの完了を判断するようにしてもよい。
掘削方位順序認識部85は、掘削方位記憶部83に記憶された掘削方位を参照し、列掘削サイクルが進む度に、掘削方位の大小の順序から掘削順序を認識する。すなわち、一つの列掘削サイクルの中で、掘削方位ごとに掘削順序を決定する。
以下、分析装置40の掘削順序評価部42の内部要素を説明する。掘削順序評価部42は、頻度集計部86と、安定度評価部87とを有する。
頻度集計部86は、掘削順序認識部41で認識された掘削順序ごとに出現した回数を数え上げ、その頻度を算出する。安定度評価部87は、算出された掘削順序頻度から掘削順序の安定度の評価値を算出する。安定度については、後で詳細に説明する。
基準値設定部43は過去のデータ等に基づいて、望ましい頻度の値を、手動入力や電子データの通信により設定する。
表示装置50は、掘削順序認識部41から出力される掘削順序と、掘削順序評価部42から出力される掘削順序の頻度及び安定度と、基準値設定部43によって設定された掘削順序の基準値を表示する。掘削順序の頻度は、図1に破線矢印で示すように、頻度集計部86から表示装置50に送信するようにしてもよい。
掘削順序、掘削順序の頻度、安定度及び基準値は、記憶部44に記憶するようにしてもよい。記憶部44はその他のソフトウェア等も記憶することができる。
上述したように、掘削順序評価部42は、掘削順序認識部41により認識された掘削順序の発生回数に基づいて、掘削順序の評価指標を生成する。この評価指標の一つが掘削順序の頻度である。本実施例では、その他の評価指標として安定度を用いている。評価指標は上記のものに限らず、掘削順序の発生回数に基づく評価指標を用いることができる。評価指標は、作業方法(掘削順序)を改善するための気づきを与える指標であればよい。
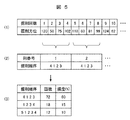
図5は、本発明の一実施例に係る分析装置40による掘削順序の認識、評価を説明する図である。
以下、本図を用いて、分析装置40の作用を説明する。
(1)掘削方位記憶部83は、掘削方位検出部82が検出した方位の値(角度)を掘削された順に記憶する(図5の(1))。
(2)掘削方位順序検出部85は、列掘削サイクル検出部84の出力に従って、列掘削サイクル1回毎の掘削方位を掘削方位記憶部83から取り出し、その値の大小順序に従って、順序番号列を生成する。これが掘削順序認識結果である(図5の(2))。
(3)頻度集計部86は、掘削順序毎に出現回数を数え上げ、その比率(頻度)を算出する(図5の(3))。
(4)安定度評価部87は、その集計された頻度から掘削順序の安定度の指標を算出する。安定度は、例えば、掘削順序の頻度の大きいものから数種の掘削順序の頻度の合計値を用いる。例えば、図5の(3)で、上位2つの合計値を用いる場合は、掘削順序4123の頻度と掘削順序1234の頻度との合計値である75になる。或いは、上位3つの合計値を用いる場合は、掘削順序4123の頻度と掘削順序1234の頻度と掘削順序51234の頻度との合計値である85になる。
このような安定度を評価指標に用いるのは、同じ現場では、特別に固い土砂が現れた時などの例外を除いて、最適な掘削順序は概ね同じであると考えられるため、効率の良い作業では、作業の大半を数種類の掘削順序で行うと考えられるためである。
図6は、本発明の一実施例に係る表示装置50の表示画面に表示される内容を示す図である。
表示装置50には、分析装置40の掘削順序認識部41により認識された掘削順序の履歴がリスト51として順次表示される。また、掘削順序評価部42で集計された掘削順序の頻度54が、頻度の大きいものの順に、基準値(基準頻度)55と並べてグラフ52で表示される。また、安定度評価部87により算出された安定度指標53が数値で表示される。本実施例では、掘削順序の頻度において上位3つの合計値を用いて安定度指標53を算出している。
本実施例に係る作業分析システムの動作について説明する。図7は、本発明の一実施例に係る作業分析システムのフローチャートである。
ステップ1(S1)で、回数集計メモリ(連想配列)を消去する。回数集計メモリは図1の記憶部44で構成することができる。或いは、専用のメモリで回数集計メモリを構成してもよい。
ステップ1に続くステップ2(S2)で、掘削方位記憶部83の旋回方位リストを消去し、走行距離変数に0を設定する。走行距離変数は記憶部44に記憶され、記憶部44の走行距離変数として0を記憶することで、走行距離変数に0が設定される。
ステップ2に続くステップ3(S3)で、走行検出センサ73の出力を読み込み、前回からの走行距離を計算し、走行距離変数に加算する。
ステップ3に続くステップ4(S4)で、作業装置姿勢センサ72の出力を読み込む。
ステップ4に続くステップ5(S5)で、作業装置姿勢センサ72の出力に基づいて掘削開始姿勢か否かを判定する。この処理は、掘削動作判別部81によって実行される。掘削開始姿勢でない場合(NOの場合)は、ステップ3(S3)に戻る。掘削開始姿勢である場合(YESの場合)は、ステップ6(S6)に進む。
ステップ6(S6)で、旋回角度センサの出力を読み込み、旋回方位リストに追加する。
ステップ6に続くステップ7(S7)で、走行距離変数が所定値以上か否かを判定する。この処理は、列掘削サイクル検出部84によって実行される。走行距離変数が所定値未満の場合(NOの場合)は、ステップ3(S3)に戻る。走行距離変数が所定値以上の場合(YESの場合)は、ステップ8(S8)に進む。
ステップ8(S8)で、掘削方位順序検出部85により、旋回方位リストに記録された角度から掘削方位順序を求める。この処理においては、旋回方位リストに記録されたそれぞれの角度に対して、角度が最も小さいものを1とする方位番号を求め、その方位番号を掘削した順序で並べることによって、掘削方位順序を求める。この掘削方位順序はこの掘削方位順序が生成された列番号に対応させて記憶部44に記憶してもよい。掘削方位順序の生成方法を、図5(1)における最初の列の部分(掘削回数1〜4)を例として説明する。まず、4回の掘削のうち、最初の掘削の方位角度(120度)は、最も角度が大きく、小さい方から数えて4番目であるため、方位番号を「4」とする。続いて、2番目の掘削の方位角度(58度)は、最も角度が小さいので、方位番号を「1」とする。続いて、3番目の掘削の方位角度(75度)は、2番目に角度が小さいので、方位番号を「2」とする。続いて、4番目の掘削の方位角度(102度)は、3番目に角度が小さいので、方位番号を「3」とする。これらの方位番号を、掘削した順序で並べると「4」「1」「2」「3」となる。このようにして求めた番号列「4123」が掘削方位順序である。
ステップ8に続くステップ9(S9)で、掘削方位順序をキーとして回数集計メモリを参照し、この掘削方位順序に対応する変数に1を加える。
ステップ9に続くステップ10(S10)で、所定の集計期間が終了したか否かを判定する。この判定は集計期間判定部45で実行される。この判定は、時間に基づいて行ってもよいし、列数に基づいて行ってもよい。
ステップ10に続くステップ11(S11)で、回数集計メモリから全ての掘削方位順序に対する回数を読み出してその合計値を求め、各々の回数を合計値で割って掘削方位順序の頻度を求める。この処理は、頻度集計部86によって実行される。その他に、安定度評価部87では安定度53が算出される。
ステップ11に続くステップ12(S12)で、表示装置50に、掘削方位順序毎に頻度を表示する。このステップS12では、その他に、掘削順序履歴51、安定度53及び基準頻度等が表示装置50に表示される。
上記の説明では、表示装置50はショベル1に搭載され、情報はオペレータに提示されるものとしている。これに対して、表示装置50を鉱山や工事現場の管理事務所に設置し、ショベル1から無線通信でデータを管理事務所に送信して表示するようにしてもよい。或いは、表示装置50はショベル1及び管理事務所の両方に設置してもよい。これにより、情報を管理者・監督者に提示することができる。
また、上記の説明では、分析装置40はショベル1に搭載されるものとしている。これに対して、分析装置40を管理事務所やデータ処理センタに設置し、ショベル1からセンサ情報を無線で管理事務所やデータ処理センタの分析装置40に伝送して分析を行うようにしても良い。分析した結果は、管理事務所やデータ処理センタの分析装置40からショベル1に無線伝送するとよい。複数台のショベル1が作業を行う現場では、個々のショベル1に分析装置40を設ける必要がなく、ショベル1を低コスト化できる。また分析した結果は、管理事務所やデータ処理センタからショベル1に無線伝送するようにするとよい。これにより、オペレータは分析結果を確認しながら作業を行うことができる。
また、上記の各構成、機能、処理部、処理手段等は、それらの一部又は全部を、例えば集積回路等で設計する等によりハードウェアで実現してもよい。また、上記の各構成、機能、処理部、処理手段等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行するようにしたソフトウェアで実現してもよい。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリや、ハードディスク、SSD(Solid State Drive)等の記録装置、または、ICカード、SDカード、DVD当の記録媒体におくことができる。
また、図1に示した情報線は説明上必要と考えられるものを示しており、製品において必要とされる全ての情報線を示しているとは限らない。実際には、殆ど全ての構成が相互に接続されていると考えてもよい。
また、上記の説明では、本発明をベンチカット工法に適用した例を説明したが、移動しながら掘削する他の工法に適用することもできる。
1…ショベル、3…作業分析システム、10…下部走行体、20…上部旋回体、30…作業装置、31…ブーム、32…アーム、33…バケット、40…分析装置、41…掘削順序認識部、42…掘削順序評価部、43…基準値設定部、44…記憶部、45…集計期間判定部、50…表示装置、60…ベンチ、61…切羽、61A,61B,61C,61D…切羽の分割掘削位置、62…切羽の幅方向、63…掘削方向、71…旋回角度センサ、72…作業装置姿勢センサ、73…走行検出センサ、81…掘削動作判別部、82…掘削方位検出部、83…掘削方位記憶部、84…列掘削サイクル検出部、85…掘削方位順序認識部、86…頻度集計部、87…安定度評価部。
Claims (5)
- 走行機能を有する下部走行体に対して旋回動作が可能な上部旋回体にバケットを含む作業装置を搭載して掘削作業を行うショベルの作業分析システムにおいて、
切羽の一列を掘削する列掘削サイクルにおける掘削順序を認識する掘削順序認識部と、
前記掘削順序認識部により認識された掘削順序の発生回数に基づいて、掘削順序の評価指標を生成する掘削順序評価部と、
前記掘削順序評価部により生成された前記評価指標を表示する表示装置と、
を備えたことを特徴とする作業分析システム。 - 請求項1に記載の作業分析システムにおいて、
前記掘削順序認識部は、
掘削方位を検出する掘削方位検出部と、
列掘削サイクルを検出する列掘削サイクル検出部と、
前記掘削方位検出部により検出された掘削方位に基づいて、前記列掘削サイクル検出部により検出された列掘削サイクルにおける掘削順序を検出する掘削方位順序検出部と、
を備えることを特徴とする作業分析システム。 - 請求項1に記載の作業分析システムにおいて、
前記評価指標が掘削順序の頻度であることを特徴とする操作支援システム。 - 請求項3に記載の作業分析システムにおいて、
前記掘削順序の頻度と共に、前記掘削順序の頻度の基準値を前記表示装置に表示することを特徴とする操作支援システム。 - 請求項1に記載の作業分析システムにおいて、
前記評価指標が頻度の高い上位複数の掘削順序の頻度の合計値により求められた安定度であることを特徴とする操作支援システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015134326A JP2017014836A (ja) | 2015-07-03 | 2015-07-03 | 作業機械の作業分析システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015134326A JP2017014836A (ja) | 2015-07-03 | 2015-07-03 | 作業機械の作業分析システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017014836A true JP2017014836A (ja) | 2017-01-19 |
Family
ID=57830010
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015134326A Pending JP2017014836A (ja) | 2015-07-03 | 2015-07-03 | 作業機械の作業分析システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017014836A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019124049A (ja) * | 2018-01-16 | 2019-07-25 | 住友建機株式会社 | ショベル |
| WO2019187792A1 (ja) * | 2018-03-29 | 2019-10-03 | 株式会社小松製作所 | 作業車両の制御システム、方法、及び作業車両 |
| CN114490823A (zh) * | 2022-01-28 | 2022-05-13 | 上海华兴数字科技有限公司 | 甩方周期计量方法、装置、设备及作业机械 |
-
2015
- 2015-07-03 JP JP2015134326A patent/JP2017014836A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019124049A (ja) * | 2018-01-16 | 2019-07-25 | 住友建機株式会社 | ショベル |
| JP7062445B2 (ja) | 2018-01-16 | 2022-05-06 | 住友建機株式会社 | ショベル |
| WO2019187792A1 (ja) * | 2018-03-29 | 2019-10-03 | 株式会社小松製作所 | 作業車両の制御システム、方法、及び作業車両 |
| JP2019173471A (ja) * | 2018-03-29 | 2019-10-10 | 株式会社小松製作所 | 作業車両の制御システム、方法、及び作業車両 |
| AU2019246095B2 (en) * | 2018-03-29 | 2021-06-24 | Komatsu Ltd. | Control system for work vehicle, method, and work vehicle |
| US11598073B2 (en) | 2018-03-29 | 2023-03-07 | Komatsu Ltd. | Control system for work vehicle, method, and work vehicle |
| CN114490823A (zh) * | 2022-01-28 | 2022-05-13 | 上海华兴数字科技有限公司 | 甩方周期计量方法、装置、设备及作业机械 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7574821B2 (en) | Autonomous loading shovel system | |
| US11041288B2 (en) | Work machine | |
| RU2652593C1 (ru) | Способ и система для активного взвешивания груза для горнопроходческого оборудования | |
| US9691025B2 (en) | Machine operation classifier | |
| AU2017376652A1 (en) | Tool erosion detecting system using augmented reality | |
| JPWO2014192474A1 (ja) | 作業車両 | |
| AU2013318066A1 (en) | A method and system for preemptively determining a load weight for mining excavation equipment | |
| CN112074641B (zh) | 控制装置和控制方法 | |
| JP6911356B2 (ja) | 支持層到達判定方法及び判定支援システム | |
| JP2020071742A (ja) | 再生装置、分析支援システム及び再生方法 | |
| JP2017014836A (ja) | 作業機械の作業分析システム | |
| KR102592220B1 (ko) | 재생 장치, 분석 지원 시스템 및 재생 방법 | |
| US20180313061A1 (en) | Control system using fuzzy logic to display machine productivity data | |
| CN111094663B (zh) | 作业机械及包含作业机械的系统 | |
| JP6617088B2 (ja) | 油圧ショベルの作業効率指標表示システム | |
| CN112602120A (zh) | 再现装置、分析支援系统及再现方法 | |
| Corke et al. | Dragline automation: experimental evaluation through productivity trial | |
| AU2022271498A1 (en) | System and method for determining machine hang time | |
| CN113867198A (zh) | 掘进设备的控制系统、方法及其装置 | |
| CN117828904B (zh) | 用于超大直径泥水盾构穿越孤石地层的刀盘受力计算方法 | |
| KR20250118581A (ko) | 굴삭기의 로그데이터를 기반으로 한 운전자의 운전 특성 도출 방법 | |
| KR200397423Y1 (ko) | 굴삭기의 작업표시장치 | |
| Branscombe | An Investigation of Diggability and Other Digging Effort Related Metrics for Cable Shovels at Multiple Mines | |
| CN121500738A (zh) | 用于训练机器学习模型的用户辅助对象识别 | |
| Oskouei | Methods for evaluating effect of operators on dragline energy efficiency |