JP2017100214A - マニピュレータシステム、撮像システム、対象物の受け渡し方法、及び、マニピュレータ制御プログラム - Google Patents
マニピュレータシステム、撮像システム、対象物の受け渡し方法、及び、マニピュレータ制御プログラム Download PDFInfo
- Publication number
- JP2017100214A JP2017100214A JP2015233659A JP2015233659A JP2017100214A JP 2017100214 A JP2017100214 A JP 2017100214A JP 2015233659 A JP2015233659 A JP 2015233659A JP 2015233659 A JP2015233659 A JP 2015233659A JP 2017100214 A JP2017100214 A JP 2017100214A
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- manipulator device
- manipulator
- orientation
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/04—Viewing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1687—Assembly, peg and hole, palletising, straight line, weaving pattern movement
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/64—Three-dimensional [3D] objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/90—Arrangement of cameras or camera modules, e.g. multiple cameras in TV studios or sports stadiums
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39508—Reorientation of object, orient, regrasp object
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40053—Pick 3-D object from pile of objects
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45063—Pick and place manipulator
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Signal Processing (AREA)
- Manipulator (AREA)
Abstract
【課題】未整理状態の複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、低コストで実現することを課題とする。
【解決手段】マニピュレータ装置10と、置き部1に置かれた複数の対象物の三次元情報に基づいて、該置き部からマニピュレータ装置によって取り出すべき対象物を認識する取出用認識手段40と、マニピュレータ装置が取り出した対象物の向きを認識する向き認識手段40と、前記取出用認識手段が認識した対象物をマニピュレータ装置で保持して置き部の外部へ取り出すようにマニピュレータ装置を制御する取り出し制御、及び、そのマニピュレータ装置が取り出した対象物を所定の向きで受け部2へ受け渡すように、前記向き認識手段による認識結果を用いて当該マニピュレータ装置を制御する受け渡し制御を実行する制御手段とを有する。
【選択図】図3
【解決手段】マニピュレータ装置10と、置き部1に置かれた複数の対象物の三次元情報に基づいて、該置き部からマニピュレータ装置によって取り出すべき対象物を認識する取出用認識手段40と、マニピュレータ装置が取り出した対象物の向きを認識する向き認識手段40と、前記取出用認識手段が認識した対象物をマニピュレータ装置で保持して置き部の外部へ取り出すようにマニピュレータ装置を制御する取り出し制御、及び、そのマニピュレータ装置が取り出した対象物を所定の向きで受け部2へ受け渡すように、前記向き認識手段による認識結果を用いて当該マニピュレータ装置を制御する受け渡し制御を実行する制御手段とを有する。
【選択図】図3
Description
本発明は、マニピュレータシステム、撮像システム、対象物の受け渡し方法、及び、マニピュレータ制御プログラムに関するものである。
従来、所定のトレイあるいは容器などの置き部に山積みされた複数のワークの中から選択される1つのワークをマニピュレータ装置で保持して所定の場所へ取り出すマニピュレータシステムが知られている。
例えば、特許文献1には、コンベアベルト上の多数の物体をカメラで撮像し、その撮像画像に基づいて選択される物体をロボットのグリッパで把持して対象容器へ仕分けするように、ロボット(マニピュレータ装置)を制御するロボットシステムが開示されている。
近年、複数のワークの中から選択されるワークを所定の受け部へ受け渡す作業をマニピュレータ装置で自動化するマニピュレータシステムでは、ワーク(対象物)を受け部に対して所定の向きで受け渡す作業をマニピュレータ装置で自動化することが求められている。特に、その自動化にあたっては、互いに重なるように置かれた未整理状態(山積み状態など)の複数の対象物の中から選択される対象物を取り出すという作業と、その対象物を受け部に対して所定の向きで受け渡すという作業とを、一連の作業として、低コストで自動化できるマニピュレータシステムが求められている。
上述した課題を解決するために、本発明は、複数の対象物が置かれた置き部から対象物を取り出すマニピュレータ装置と、前記置き部に置かれた複数の対象物の三次元情報に基づいて、該置き部から前記マニピュレータ装置によって取り出すべき対象物を認識する取出用認識手段と、前記マニピュレータ装置が取り出した対象物の向きを認識する向き認識手段と、前記取出用認識手段が認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出すように該マニピュレータ装置を制御する取り出し制御、及び、該マニピュレータ装置が取り出した対象物を所定の向きで受け部へ受け渡すように、前記向き認識手段による認識結果を用いて該マニピュレータ装置を制御する受け渡し制御を実行する制御手段とを有することを特徴とする。
本発明によれば、未整理状態の複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、低コストで実現できるという優れた効果が奏される。
以下、本発明に係るマニピュレータシステムを適用した部品検査システムの一実施形態について説明する。
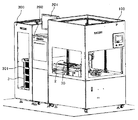
図1は、本実施形態における部品検査システムの斜視図である。
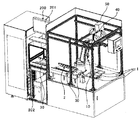
図2は、本実施形態における部品検査システムの外装カバーを取り外した状態の斜視図である。
図1は、本実施形態における部品検査システムの斜視図である。
図2は、本実施形態における部品検査システムの外装カバーを取り外した状態の斜視図である。
本実施形態における部品検査システムは、マニピュレータシステムであるピッキングロボット100と、外観検査装置200及びマガジン収容部300とから構成されている。ピッキングロボット100は、置き部である山積みトレイ1上に山積みされた複数のワークの中から選択されるワークを取り出し、そのワークを受け部であるパレット2の対応箇所に所定の向きでセットする(受け渡す)という一連の作業をマニピュレータ装置10で自動的に実施するものである。ピッキングロボット100の詳細な構成及び動作については後述する。
ワークがセットされたパレット2は、パレット移送機構30によって、ピッキングロボット100から外観検査装置200へと移送される。外観検査装置200は、パレット2を上方から撮像する外観認識手段である検査カメラや、その検査カメラによって撮像した撮像画像に基づき、外観検査処理を実行するパソコン等の外観検査処理装置202などで構成される。本実施形態の外観検査装置200では、パレット2上にワークが正しい向きでセットされているか、パレット2にセットされたワークに外観上の異常がないかなどの外観検査処理を実行する。この外観検査処理において異常が検出された場合、外観検査処理装置202は、異常報知手段であるモニター201等の表示手段を制御して、作業者に対して異常を報知する。本実施形態では、異常が検出されたワークの画像がモニター201に表示され、作業者は、そのモニター201で異常を目視確認できる。
外観検査装置200の検査をパスしたパレット2、あるいは、外観検査装置200での異常を解消したパレット2は、パレット移送機構30によって、外観検査装置200からマガジン収容部300へと移送される。マガジン収容部300には、複数のマガジン3が積み重ねて保管されるマガジン棚301が設けられている。外観検査装置200から移送されてくるパレット2は、マガジン棚301に積み重ねられているマガジン3へ順次収容される。パレット2が収容されたマガジン3の数が所定数に達したら、作業者は、積み重なった状態のマガジン3をマガジン収容部300から取り出し、後段の処理装置へと運ぶ。
本実施形態では、後段の処理装置において電子部品を実装する電子回路基板を製造するものである。したがって、本実施形態におけるワークは、基板上に実装されるコネクタ類、あるいは、インダクタ、コンデンサ、抵抗等の回路部品、あるいは、ICチップ等の電子部品など、基板上に実装される各種部品である。なお、本実施形態におけるワークの種類は、後段の処理装置で行う処理内容などによって変わるものであり、受け部であるパレット2に対して所定の向きでセットする必要がある対象物(非対称形状をもつ非対称物であっても、対称形状をもつ対称物であってもよい。)であれば、特に制限はない。したがって、基板上に実装される部品に限らず、セットすべき向きが決められているあらゆるワークが対象物となり得る。
次に、本実施形態におけるピッキングロボット100の構成及び動作について説明する。
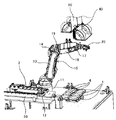
図3は、本実施形態におけるピッキングロボット100の構成を示す斜視図である。
本実施形態のピッキングロボット100には、5軸のマニピュレータ装置10と、パレット2を外観検査装置200へ移送するパレット移送機構30と、取出用認識手段を構成する撮像手段としてのステレオカメラ40と、ステレオカメラ40の撮像領域に向けて所定の測定用光を照射する測定用光照射手段としてのパターン画像投射手段であるパターン投射装置50とが備わっている。
図3は、本実施形態におけるピッキングロボット100の構成を示す斜視図である。
本実施形態のピッキングロボット100には、5軸のマニピュレータ装置10と、パレット2を外観検査装置200へ移送するパレット移送機構30と、取出用認識手段を構成する撮像手段としてのステレオカメラ40と、ステレオカメラ40の撮像領域に向けて所定の測定用光を照射する測定用光照射手段としてのパターン画像投射手段であるパターン投射装置50とが備わっている。
マニピュレータ装置10は、鉛直方向に平行な回転軸回りに回転する第一関節部11上に、水平方向に平行な回転軸回りに回転する第二関節部12が取り付けられている。第二関節部12には第一アーム部13の一端が取り付けられており、第一関節部12が駆動すると、第一アーム部13が第二関節部12の回転軸回りに回転する。第一アーム部13の他端には、第二関節部12の回転軸に平行な回転軸回りに回転する第三関節部14が取り付けられている。第三関節部14には、第二アーム部16を第二アーム部16の長手方向に平行な回転軸回りに回転させる第四関節部15が取り付けられている。第四関節部15には第二アーム部16の一端が取り付けられている。第三関節部14が駆動すると、第四関節部15に取り付けられた第二アーム部16が第三関節部14の回転軸回りに回転する。また、第四関節部15が駆動すると、第二アーム部16が第四関節部15の回転軸回りに回転する。第二アーム部16の他端には、第二アーム部16の長手方向に対して直交する方向に平行な回転軸回りに回転する第五関節部17が取り付けられている。この第五関節部17には保持部としてのハンド部20が取り付けられている。第五関節部17が駆動すると、ハンド部20が第五関節部17の回転軸回りに回転する。
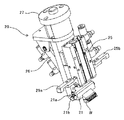
図4は、ハンド部20のワーク吸着部側から見た斜視図である。
図5は、ワークWを保持した状態のハンド部20を示す、図4とは別方向から見た斜視図である。
本実施形態におけるハンド部20は、ワークWをワーク吸着部21にエア吸引により吸着して保持するものである。なお、ワークWを保持できる構成であれば、磁気力等によりワークWを吸着する構成、把持部でワークWを把持する構成など、あらゆる保持の構成を採用することができる。
図5は、ワークWを保持した状態のハンド部20を示す、図4とは別方向から見た斜視図である。
本実施形態におけるハンド部20は、ワークWをワーク吸着部21にエア吸引により吸着して保持するものである。なお、ワークWを保持できる構成であれば、磁気力等によりワークWを吸着する構成、把持部でワークWを把持する構成など、あらゆる保持の構成を採用することができる。
本実施形態におけるハンド部20は、エア吸着用の吸引孔22が開口したワーク吸着面を有するワーク吸着部21を備えている。ワーク吸着部21の内部には、ワーク吸着用ポンプ24に接続される接続口21bと各吸引孔22とを連通させるエア吸引通路が形成されている。ハンド部20は、ワーク吸着用ポンプ24を駆動して吸引孔22に吸い込み気流を生じさせることにより、ワークWをワーク吸着部21のワーク吸着面に吸着してピックアップできる。また、ワーク吸着用ポンプ24を停止することで、ワーク吸着面からワークWをリリースすることができる。
また、本実施形態において、ハンド部20のワーク吸着面に対するワークWの保持位置は、次のようにして位置決めされる。まず、ハンド部20でワークWをピックアップする際、ワークWの側面がワーク吸着面上の規制壁23に当接するようにピックアップして保持することにより、規制壁23の壁面法線方向におけるワークWの保持位置が位置決めされる。また、ワークWを保持した後、ハンド部20に搭載されているワーク保持位置調整装置25を駆動して、ワーク吸着面上のワークWを挟持アーム25a,25bにより挟み込むことにより、規制壁23の壁面平行方向におけるワークWの保持位置が、ワーク吸着面の中央位置に位置決め(センタリング)される。
なお、ハンド部20のワーク吸着面に対するワークWの保持位置は、山積みトレイ1からワークWをピックアップする際に、そのワークWの位置や姿勢等を高精度に検出できる場合には、ワークWをピックアップする時点で位置決めを完了することも可能である。そのような場合には、ハンド部20に対するワークWの保持位置を調整する調整手段(規制壁23、ワーク保持位置調整装置25など)は、必ずしも必要ではない。
また、本実施形態のハンド部20には、ワーク吸着部21をハンド部20上の回転軸21aの回りで回転させるハンド回転機構26が設けられている。ハンド回転機構26を駆動させることにより、ハンド部20に保持されているワークWの姿勢を、図6(a)に示すピッキング姿勢から、図6(b)に示す受け渡し姿勢へと変化させることができる。ここでいうピッキング姿勢とは、マニピュレータ装置10が各関節部11,12,14,15,17を駆動して、ハンド部20のワーク吸着部21でワークWをピックアップして保持するための姿勢である。一方、受け渡し姿勢とは、各関節部11,12,14,15,17の駆動によりパレット2の対応箇所へワークWをセットする(受け渡す)位置にハンド部20を移動させたときにワーク吸着部21に保持されたワークWの向きが所定の向きとなる姿勢である。
なお、本実施形態のマニピュレータ装置10であれば、各関節部11,12,14,15,17を駆動することにより、ハンド回転機構26を用いることなく、ハンド部20に保持されているワークWの姿勢を、図6(a)に示すピッキング姿勢から図6(b)に示す受け渡し姿勢へと変化させることが可能である。しかしながら、このようなワークWの姿勢変化を、各関節部11,12,14,15,17の駆動によって実現しようとすると、マニピュレータ装置10の周囲に存在する物体との干渉を回避するための演算処理等が必要になり、複雑な制御を要するうえ、必要な関節動作の時間も長い。そのため、ハンド部20のハンド回転機構26で実現する場合と比較して、その姿勢変化を完了するまでに比較的時間がかかってしまう。本実施形態によれば、ハンド部20にハンド回転機構26を設けることにより、図6(a)に示すピッキング姿勢から図6(b)に示す受け渡し姿勢への迅速な姿勢変化が可能となり、システム全体の処理時間の短縮化を図ることができる。
図7は、本実施形態におけるピッキングロボット100の主要部分に関わる制御ブロック図である。
本実施形態のピッキングロボット100は、各関節部11,12,14,15,17をそれぞれ駆動する関節駆動装置501〜505、ワーク吸着用ポンプ24と、ワーク保持位置調整装置25と、ハンド回転機構26と、パレット移送機構30と、ステレオカメラ40と、パターン投射装置50などを制御するロボット制御部500を備えている。このロボット制御部500は、CPU等の演算処理部と、演算処理部で用いるデータ等を一時的に保持するRAM等の一時記憶部などから構成されており、本実施形態における部品検査システムの全体を上位で制御しているシステム制御部600からの制御命令を受けて、各種制御を実行する。ロボット制御部500の演算処理部で実行される各種プログラムは、記憶部506に記憶されている。この各種プログラムには、ピッキングロボット100におけるマニピュレータ装置10、ステレオカメラ40、パターン投射装置50等を制御するマニピュレータ制御プログラムが含まれている。
本実施形態のピッキングロボット100は、各関節部11,12,14,15,17をそれぞれ駆動する関節駆動装置501〜505、ワーク吸着用ポンプ24と、ワーク保持位置調整装置25と、ハンド回転機構26と、パレット移送機構30と、ステレオカメラ40と、パターン投射装置50などを制御するロボット制御部500を備えている。このロボット制御部500は、CPU等の演算処理部と、演算処理部で用いるデータ等を一時的に保持するRAM等の一時記憶部などから構成されており、本実施形態における部品検査システムの全体を上位で制御しているシステム制御部600からの制御命令を受けて、各種制御を実行する。ロボット制御部500の演算処理部で実行される各種プログラムは、記憶部506に記憶されている。この各種プログラムには、ピッキングロボット100におけるマニピュレータ装置10、ステレオカメラ40、パターン投射装置50等を制御するマニピュレータ制御プログラムが含まれている。
本実施形態では、ピッキングロボット100の内部に形成されている処理空間の上部にステレオカメラ40とパターン投射装置50が配置されている。パターン投射装置50は、処理空間内の下部に配置されている山積みトレイ1へ上方からパターン画像を投射する。これにより、山積みトレイ1上のワークWの外面にパターン画像が映し出される。ステレオカメラ40は、山積みトレイ1上のワークWや一時載置トレイ4上のワークWを上方から撮像する。本実施形態では、一定幅の歪みがない縞状パターンからなるパターン画像を用い、これを山積みトレイ1上のワークWへ投射する。ことにより、山積みトレイ1上に山積みされた複数のワークW間の凹凸や個々のワークWの表面凹凸に応じて縞状パターンに歪みが生じた状態のパターン画像がステレオカメラ40によって撮像される。
図8は、ステレオカメラ40の撮像領域を示す説明図である。
ステレオカメラ40は、少なくとも、基準画像を撮像する基準カメラ40Aと比較画像を撮像する比較カメラ40Bの2つのカメラ(撮像部)により、山積みトレイ1上の複数のワークWを、異なる複数の地点から撮像して、基準画像と比較画像を得る。そして、基準画像と比較画像との視差情報から、三角測量の原理に基づき、山積みトレイ1に山積みされた複数のワークWの表面上の各地点までの距離を導出し、その距離(視差値)に応じた画素値をもつ視差画像(距離画像)の情報(三次元情報)を生成する。ステレオカメラ40で得られる視差画像情報から、山積みトレイ1の上方から視認できるいくつかのワークWの三次元形状データを取得することができる。なお、視差画像情報の取得に関し、パターン画像の投射は必ずしも必要ではない。
ステレオカメラ40は、少なくとも、基準画像を撮像する基準カメラ40Aと比較画像を撮像する比較カメラ40Bの2つのカメラ(撮像部)により、山積みトレイ1上の複数のワークWを、異なる複数の地点から撮像して、基準画像と比較画像を得る。そして、基準画像と比較画像との視差情報から、三角測量の原理に基づき、山積みトレイ1に山積みされた複数のワークWの表面上の各地点までの距離を導出し、その距離(視差値)に応じた画素値をもつ視差画像(距離画像)の情報(三次元情報)を生成する。ステレオカメラ40で得られる視差画像情報から、山積みトレイ1の上方から視認できるいくつかのワークWの三次元形状データを取得することができる。なお、視差画像情報の取得に関し、パターン画像の投射は必ずしも必要ではない。
図9は、ステレオカメラ40による距離の測定原理を説明する説明図である。
ステレオカメラ40の基準カメラ40Aと比較カメラ40Bは、それぞれ、画像センサ41A,41B及びレンズ42A,42Bをそれぞれ備えている。基準カメラ40Aで撮像された基準画像と比較カメラ40Bで撮像された比較画像には、撮像対象物であるワークW上の同一地点Woが、各カメラ40A,40Bの画像センサ41A,41B上の異なる位置に結像される。画像センサ41A,41B上での結像位置の差(視差)をdとし、これらのカメラ40A,40B間の距離をBとし、各カメラ40A,40Bの焦点距離をfとしたとき、画像センサ41A,41Bのセンサ面から測定地点Woまでの距離Zは、下記の式(1)から求めることができる。Bとfは予め決まっているため、基準画像と比較画像から視差dを算出することにより、ワークW上の各地点までの距離を算出することができる。
Z = B × f/d ・・・(1)
ステレオカメラ40の基準カメラ40Aと比較カメラ40Bは、それぞれ、画像センサ41A,41B及びレンズ42A,42Bをそれぞれ備えている。基準カメラ40Aで撮像された基準画像と比較カメラ40Bで撮像された比較画像には、撮像対象物であるワークW上の同一地点Woが、各カメラ40A,40Bの画像センサ41A,41B上の異なる位置に結像される。画像センサ41A,41B上での結像位置の差(視差)をdとし、これらのカメラ40A,40B間の距離をBとし、各カメラ40A,40Bの焦点距離をfとしたとき、画像センサ41A,41Bのセンサ面から測定地点Woまでの距離Zは、下記の式(1)から求めることができる。Bとfは予め決まっているため、基準画像と比較画像から視差dを算出することにより、ワークW上の各地点までの距離を算出することができる。
Z = B × f/d ・・・(1)
図10は、本実施形態におけるピッキングロボット100の動作制御の流れを示すフローチャートである。
本実施形態におけるピッキングロボット100の動作制御では、山積みトレイ1に山積みされた複数のワークWからピックアップ対象のワークWを取り出す作業を行う取出制御モードと、取り出したワークWを所定の向きでパレット2へセットするセット作業を行うセット制御モードとを実行する。
本実施形態におけるピッキングロボット100の動作制御では、山積みトレイ1に山積みされた複数のワークWからピックアップ対象のワークWを取り出す作業を行う取出制御モードと、取り出したワークWを所定の向きでパレット2へセットするセット作業を行うセット制御モードとを実行する。
システム制御部600からロボット制御部500にピッキング処理の実行命令が入力されると、ロボット制御部500は、取出制御モードを実行し、まず、パターン投射装置50を制御してパターン画像を投射させる(S1)。これにより、山積みトレイ1に山積みされた複数のワークWにパターン画像が映し出される。その後、ロボット制御部500は、ステレオカメラ40を制御して、山積みトレイ1に山積みされた複数のワークWを撮像し(S2)、ステレオカメラ40から出力される三次元情報としての視差画像情報(距離画像情報)を取得する(S3)。
ロボット制御部500は、取得した視差画像情報に基づき、山積みトレイ1に山積みされた複数のワークWの中から、所定のピックアップ条件を満たすワークWを特定し、そのワークWをハンド部20のワーク吸着面に吸着させるためにハンド部20が位置すべきピックアップ位置とワーク吸着面の向き(ピックアップ姿勢)を算出する(S4)。
その算出方法としては、例えば、予めワークWの三次元形状データ(CADデータ等)を記憶部506に記憶しておき、視差画像情報から得られたいくつかのワークWの三次元形状データを、記憶部506の三次元形状データとパターンマッチングする方法が挙げられる。この方法では、パターンマッチングにより特定されたワークWの位置や姿勢に応じ、ピックアップ位置及びピックアップ姿勢を算出する。このとき、複数のワークWの位置や姿勢(向き)がパターンマッチングにより特定された場合には、例えば、その中で最も距離が短いという条件、すなわち、山積みトレイ1に山積みされた複数のワークWの中で最も上に位置するという条件を満たす1つのワークWを特定する。
また、別の算出方法としては、例えば、記憶部506の三次元形状データ(CADデータ等)を用いない方法も挙げられる。具体的には、例えば、視差画像情報に基づき、ハンド部20のワーク吸着面に吸着可能な面積をもつ面領域を特定し、特定した面領域に応じたピックアップ位置及びピックアップ姿勢を算出する。ここで、本実施形態では、ワーク吸着面にワークWを吸着させて保持する構成であるため面領域を特定しているが、保持する構成によっては、その保持する箇所(ワークW間の隙間領域やワークWの頂点など)を特定することが必要となる場合もある。
このようにしてピックアップ位置及びピックアップ姿勢を算出したら、次に、ロボット制御部500は、ハンド部20が、算出したピックアップ位置に移動し、そのピックアップ位置で、算出したピックアップ姿勢となるように、マニピュレータ装置10の目標駆動プロファイルを生成する(S5)。そして、ロボット制御部500は、その目標駆動プロファイルに沿って、各関節駆動装置501〜505を駆動する(S5)。これにより、最終的に、マニピュレータ装置10のハンド部20は、目標のピックアップ位置へ移動するとともに、目標のピックアップ姿勢となる。
このとき、処理空間内に存在する物体とマニピュレータ装置10とが接触(干渉)しないように、目標駆動プロファイルを生成する必要がある。具体的には、例えば、ロボット制御部500は、予め記憶部506に登録されている障害物情報(処理空間内に固定配置されている物体の位置と形状の情報等)を参照し、マニピュレータ装置10がこれらの物体と干渉しない経路で移動するように目標駆動プロファイルを生成する。なお、障害物情報に係る物体としては、山積みトレイ1や一時載置トレイ4、ステレオカメラ40やパターン投射装置等などの周辺機器などである。
記憶部506に障害物情報が登録されていない障害物の位置や形状の情報については、例えば、障害物を検知するための障害物検知センサを配置して、その障害物検知センサにより当該障害物の位置や形状の情報を取得するようにしてもよい。この障害物検知センサには、公知のものを広く利用することができる。もし、上述したステレオカメラ40の撮像領域が処理空間全体にわたる場合には、ステレオカメラ40を障害物検知センサとして利用することも可能である。
目標駆動プロファイルを生成する具体的な処理内容としては、例えば、まず、最短時間で動作が完了する最短の目標駆動プロファイルを生成した後、障害物情報を参照して、当該目標駆動プロファイルで移動するマニピュレータ装置10が当該障害物情報に係る物体と接触(干渉)するか否かの干渉判定を行う。この干渉判定で干渉するというエラー結果を受けた場合、ロボット制御部500は、別の目標駆動プロファイルを生成し、再び干渉判定を行う。そして、干渉判定で干渉しないという結果を受けたら、ロボット制御部500は、その目標駆動プロファイルに沿って、各関節駆動装置501〜505を駆動する。
なお、干渉判定で干渉するという結果を受けた場合、ロボット制御部500は、新たな別の目標駆動プロファイルを生成するのではなく、所定のピックアップ条件を満たす別のワークWに対応するピックアップ位置及びピックアップ姿勢を読み出し、そのピックアップ位置及びピックアップ姿勢に対応する目標駆動プロファイルを生成するようにしてもよい。
目標駆動プロファイルに従ってマニピュレータ装置10を駆動し、ハンド部20が目標のピックアップ位置で目標のピックアップ姿勢となったら、ハンド部20のワーク吸着部21におけるワーク吸着面は、山積みトレイ上のワークのうちピックアップ対象であるワークWの被吸着面と近接対向する。この状態で、ロボット制御部500は、ワーク吸着用ポンプ24を駆動して、ワーク吸着部21のワーク吸着面上の吸引孔22に吸い込み気流を生じさせる。この吸い込み気流により、そのワークWは、ワーク吸着部21のワーク吸着面に吸い寄せられて吸着し、マニピュレータ装置10にピックアップされる(S6)。
ロボット制御部500は、ワーク吸着用ポンプ24を駆動した後、吸着の状況を確認し、吸着したか否かを確認することが望ましい。本実施形態のようにワーク吸着用ポンプ24で吸引して吸着する構成であれば、例えば、イジェクタの真空状況を表す信号を用いて吸着の状況を確認することができる。もし、吸着できていないことが判明したら、例えば、そのときのピックアップ位置及びピックアップ姿勢を記憶部506に記憶されているNGリストに登録したうえで、干渉判定で干渉するというエラー結果を受けた場合と同様、別の目標駆動プロファイルを生成する。
次に、ロボット制御部500は、このピックアップ位置及びピックアップ姿勢の状態から、一時載置トレイ4上の対応箇所へワークWをリリースする所定のリリース位置に移動し、そのリリース位置で所定のリリース姿勢となるように、マニピュレータ装置10の目標駆動プロファイルを生成する(S7)。そして、ロボット制御部500は、その目標駆動プロファイルに沿って、各関節駆動装置501〜505を駆動する(S7)。これにより、最終的に、マニピュレータ装置10のハンド部20は、ピックアップしたワークWを一時載置トレイ4の対応箇所へリリースするためのリリース位置へ移動するとともに、そのリリース位置で所定のリリース姿勢となる。
その後、ロボット制御部500は、ワーク吸着用ポンプ24を停止する。これにより、ワーク吸着部21のワーク吸着面上に吸着しているワークWが自重によりワーク吸着面から離脱してリリースされ、一時載置トレイ4の上に載置される(S8)。以上で、取出制御モードが終了し、次に、セット制御モードへ移行する。
ここで、本実施形態においては、山積みトレイ1に山積みされた複数のワークWからピックアップしたワークWを、パレット2の対応箇所に所定の向きでセットする前に、一時載置トレイ4上に一時的にリリースするようにしている。これは、次の理由による。
例えば、図11(a)及び(b)に示すコネクタであるワークWを、図12に示すパレット2上の対応溝(対応箇所)2aに対し、そのワークWのコネクタピンWpが下向きとなるようにセットする場合で説明する。この場合、コネクタ(ワークW)のピン配列方向も規定の方向となるように、すなわち、コネクタ(ワークW)のピン配列方向を示すマークピンWaがパレット2上の対応溝2aに対して予め決められた位置に位置するようにセットする必要がある。
本実施形態では、山積みトレイ1に山積みされた複数のワークWの中からピックアップ対象のワークWを特定するにあたり、ステレオカメラ40の視差画像情報を用いる。この場合、山積みトレイ1に山積みされた複数のワークWの中から、ピックアップ対象のワークWの被吸着面の位置や向きを特定することは高精度に実現可能である。しかしながら、ワークWがどのような向きであるかまでは高精度に特定することが困難である。なぜなら、ステレオカメラ40による撮像画像中に複数のワークWが重なり合って映し出されるため、個々のワークWを他のワークWと明確に識別することが難しいためである。これは、ステレオカメラ40による視差画像情報(距離画像情報)を用いる場合に限らず、パターン画像等の所定の測定用光を照射して単一のカメラで撮像して得られる光学画像(輝度画像、偏光画像、特定波長帯のフィルタ画像など)を用いる場合、TOF法(Time Of Flight法)により得られる距離画像情報を用いる場合、位相シフト法により得られる距離画像情報を用いる場合、光切断法により得られる距離画像情報を用いる場合など、撮像手段を用いて画像情報(位置とその位置の特性情報(距離や光学的特性など)とが関連づけられた情報)を得る場合には、同様の理由から、個々のワークWがどのような向きであるかまでは高精度に特定することが困難である。
特に、コネクタ(ワークW)の向きを特定する場合には、コネクタ本体に対するコネクタピンWpの向きを特定する必要があるが、コネクタピンWpは、それ自体が細くて識別しにくいうえ、他のコネクタ(ワークW)の下側に隠れやすいことや、他のコネクタ(ワークW)のコネクタピンWpと区別して認識しにくいことなどが原因で、コネクタ(ワークW)の向きを特定することは困難である。
そのため、本実施形態においては、ピックアップしたワークWを山積みトレイ1から一旦取り出してから、そのワークWがどのような向きであるかを特定する処理を行うために、一時載置トレイ4上に一時的にリリースする。この一時載置トレイ4上では、ワークWが他のワークWと重ならないように載置されるため、他のワークWに邪魔されることなく、撮像画像からワークWの向きを高精度に認識することが可能となる。図11に示すようなコネクタ(ワークW)であっても、コネクタ本体に対するコネクタピンWpの向きや、コネクタ(ワークW)のピン配列方向を示すマークピンWaの位置(向き)を、高精度に認識できるので、コネクタ(ワークW)の向きを高精度に特定できる。
本実施形態において、ロボット制御部500は、ピックアップしたワークWを一時載置トレイ4上の対応箇所にリリースしたら、次に、ステレオカメラ40を制御して、一時載置トレイ4に載置されたワークWを撮像する(S9)。ここで、一時載置トレイ4に載置されたコネクタ(ワークW)は、マニピュレータ装置10のハンド部20に吸着される被吸着面(コネクタ本体の最大面積をもつ側面)が上向きになった状態で載置されている。この状態において、コネクタピンWp及びマークピンWaは、コネクタ本体に対して水平方向へ突出した状態となる。この状態においては、コネクタ本体に対するコネクタピンWp及びマークピンWaの向きを特定するにあたり、ワークWの高さ情報(上方に配置されているステレオカメラ40からの距離情報)は不要である。むしろ、上方から撮像される二次元画像情報(光学画像情報)を用いる方が、コネクタ本体に対するコネクタピンWp及びマークピンWaの向きを高精度に特定することができる。
そこで、本実施形態では、一時載置トレイ4に載置されたワークWの二次元画像情報(光学画像情報)を取得し、その二次元画像情報からコネクタ本体に対するコネクタピンWp及びマークピンWaの向きを特定する。より具体的には、一時載置トレイ4に載置されたワークWの輝度画像情報を取得し(S10)、その輝度画像情報に基づき、一時載置トレイ4に載置されたワークWのコネクタピンWp及びマークピンWaを識別し、コネクタ本体に対するコネクタピンWp及びマークピンWaの向きを特定する。
一時載置トレイ4に載置されたワークWの輝度画像情報は、専用の撮像手段を設置して取得することも可能であるが、本実施形態では、ステレオカメラ40の撮像領域内に一時載置トレイ4も含まれるように構成されているため、ステレオカメラ40で取得する。これにより、専用の撮像手段を設置する場合と比べて、部品点数が削減され、低コスト化を実現できる。ステレオカメラ40で取得する場合、ロボット制御部500は、ステレオカメラ40の基準カメラ40Aで撮像した撮像画像をステレオカメラ40から取得すればよい。このとき、パターン投射装置50により投射されるパターン画像が、一時載置トレイ4に載置されたワークWのコネクタピンWp及びマークピンWaの識別や、その向きの特定に悪影響を与えるおそれがある場合には、パターン投射装置50によるパターン画像の投射をOFFにする。
ワークWの向きを特定する方法としては、例えば、記憶部506に記憶されているワークWのCADデータまたはマスター画像データを使用して、ステレオカメラ40で撮像した輝度画像情報から得られる二次元形状データとパターンマッチング処理を実行する。もし、一時載置トレイ4上に載置されたワークWの向きを特定するにあたり、ステレオカメラ40による視差画像情報(距離画像情報)等の三次元情報を用いる場合には、記憶部506に記憶されているワークWのCADデータを使用して、視差画像情報から得られる三次元形状データとパターンマッチングしてもよい。
なお、ピックアップしたワークWの向きを特定するための処理は、一時載置トレイ4上に1つのワークWを載置するたびに実施してよいが、一時載置トレイ4上に複数のワークWを互いに重ならないように載置すれば、複数のワークをまとめて撮像して各ワークWの向きを特定するように実施してもよい。
また、本実施形態では、ピックアップしたワークWの向きを特定するために、一時載置トレイ4上に一時的にワークWを載置してワークWの向きを特定する処理を実施するが、マニピュレータ装置10にワークWを保持した状態のまま、そのワークWの向きを特定する処理を実施してもよい。この場合、ピックアップしたワークWを山積みトレイ1から取り出した後、マニピュレータ装置10にワークWを保持した状態のまま、そのワークWをステレオカメラ40で撮像し、その撮像画像に基づいてワークWの向きを特定する。この場合でも、他のワークWが邪魔されないようにステレオカメラ40でワークWを撮像すれば、その撮像画像からワークWの向きを高精度に認識することが可能となる。
このようにして一時載置トレイ4上のワークWの向きを特定したら、ロボット制御部500は、そのワークWをハンド部20のワーク吸着面に吸着させるためにハンド部20が位置すべきピックアップ位置とワーク吸着面の向き(ピックアップ姿勢)を算出するとともに、一時載置トレイ4からピックアップしたワークWをパレット2の対応箇所に所定の向きでセットするためのセット位置及びセット姿勢を算出する(S11)。その後、ロボット制御部500は、ハンド部20が、算出したセット位置に移動し、そのセット位置で、算出したセット姿勢となるように、マニピュレータ装置10の目標駆動プロファイルを生成する(S12)。そして、ロボット制御部500は、その目標駆動プロファイルに沿って、各関節駆動装置501〜505を駆動する(S12)。なお、山積みトレイ1から一時載置トレイ4へのワーク搬送の場合と同様、干渉判定を行って目標駆動プロファイルを生成する。
ここで、一時載置トレイ4上に載置されたコネクタ(ワークW)は、コネクタピンWpやマークピンWaの向きによっては、また、コネクタ(ワークW)の表裏によっては、そのワークWをマニピュレータ装置10でピックアップしてパレット2の対応箇所に所定の向きでセットするために、マニピュレータ装置10を大きく動かす必要が生じる場合がある。この場合、各関節部11,12,14,15,17の駆動量が大きく、必要な関節動作の時間が長くなったり、マニピュレータ装置10の周囲に存在する物体との干渉を回避する目標駆動プロファイルの生成が複雑化したりするおそれがある。
本実施形態においては、上述したように、ハンド部20にハンド回転機構26が設けられており、図6(a)に示すピッキング姿勢から図6(b)に示す受け渡し姿勢への迅速な姿勢変化が可能となっている。そのため、ロボット制御部500は、目標駆動プロファイルの生成にあたり、例えば、各関節部11,12,14,15,17の駆動量が規定量以上になる場合や、干渉判定でエラー結果を受けた場合には、ハンド回転機構26を駆動してピッキング姿勢から受け渡し姿勢へ姿勢変化し、この姿勢変化後の状態で、再び目標駆動プロファイルを生成する。これにより、マニピュレータ装置10を大きく動かす必要がない目標駆動プロファイルを生成することができ、より迅速にワークWをパレット2へセットすることが可能となる。
生成した目標駆動プロファイルに従って各関節駆動装置501〜505を駆動すると、ハンド部20が所定のピックアップ位置で所定のピックアップ姿勢となり、ハンド部20のワーク吸着部21におけるワーク吸着面が、一時載置トレイ4上のワークWの被吸着面と近接対向する。この状態で、ロボット制御部500は、ワーク吸着用ポンプ24を駆動して、ワーク吸着部21のワーク吸着面上の吸引孔22に吸い込み気流を生じさせる。この吸い込み気流により、そのワークWは、ワーク吸着部21のワーク吸着面に吸い寄せられて吸着し、マニピュレータ装置10にピックアップされる(S13)。
その後、ロボット制御部500は、目標駆動プロファイルに従って各関節駆動装置501〜505を駆動することで、マニピュレータ装置10のハンド部20が、一時載置トレイ4でピックアップしたワークWをパレット2の対応箇所へセットするためのセット位置へ移動するとともに、そのセット位置で所定のセット姿勢となる。このとき、ハンド回転機構26を駆動する場合には、マニピュレータ装置10が一時載置トレイ4からワークWをピックアップした後、ハンド部20がセット位置へ移動するまでの間に、ロボット制御部500は、ハンド回転機構26を駆動させる(S14)。
マニピュレータ装置10のハンド部20がセット位置へ移動して所定のセット姿勢になったら、マニピュレータ装置10のハンド部20に保持されているコネクタ(ワークW)は、そのコネクタピンWpが下向きの状態で、かつ、そのマークピンWaがパレット2上の対応溝2aに対して予め決められた位置に位置するように、パレット2上の対応溝2aに上方から挿入された状態となる。この状態において、ロボット制御部500は、ワーク吸着用ポンプ24を停止することで、ワーク吸着部21のワーク吸着面上に吸着しているワークWが自重によりワーク吸着面から離脱してリリースされ、パレット2の対応溝2aに所定の向きでセットされる(S15)。
本実施形態によれば、山積みトレイ1に山積みされた複数のワークWからピックアップ対象のワークWを取り出す作業と、取り出したワークWを所定の向きでパレット2へセットする(受け渡す)作業とが、共通のマニピュレータ装置10によって行われる。したがって、それぞれの作業を個別のマニピュレータ装置によって行われる構成と比較して、部品コストを低く抑えることができる。特に、本実施形態では、それぞれの作業で用いられる撮像手段も、共通の撮像手段(ステレオカメラ40)を用いているため、更に部品コストを低く抑えることができる。
〔変形例1〕
次に、本実施形態におけるピッキングロボット100の一変形例(以下、本変形例を「変形例1」という。)について説明する。
図13は、ステレオカメラ40における基準カメラ40Aの撮像領域を示す説明図である。
図14は、ステレオカメラ40における比較カメラ40Bの撮像領域を示す説明図である。
上述した実施形態のピッキングロボット100において、ステレオカメラ40により適切な視差画像情報が得られる撮像領域は、図13に示す基準カメラ40Aの撮像領域と図14に示す比較カメラ40Bの撮像領域とが重複する領域である。より詳しくは、本実施形態のピッキングロボット100では、山積みトレイ1上に山積みされる複数のワークW全体の高さは、予め決められた上限値Hmax以下となるように制限される。この上限値Hmaxの範囲内において、基準カメラ40Aの撮像領域と比較カメラ40Bの撮像領域とが重複する領域は、符号Rwで示す領域となり、この有効撮像領域Rw内であれば、ステレオカメラ40により適切な視差画像情報が得られる。したがって、山積みトレイに山積みされた複数のワークの中からピックアップ対象となるワークを視差画像情報により特定する取出制御モード時の処理では、山積みトレイに山積みされた複数のワークがその有効撮像領域Rw内となるように構成する必要がある。
次に、本実施形態におけるピッキングロボット100の一変形例(以下、本変形例を「変形例1」という。)について説明する。
図13は、ステレオカメラ40における基準カメラ40Aの撮像領域を示す説明図である。
図14は、ステレオカメラ40における比較カメラ40Bの撮像領域を示す説明図である。
上述した実施形態のピッキングロボット100において、ステレオカメラ40により適切な視差画像情報が得られる撮像領域は、図13に示す基準カメラ40Aの撮像領域と図14に示す比較カメラ40Bの撮像領域とが重複する領域である。より詳しくは、本実施形態のピッキングロボット100では、山積みトレイ1上に山積みされる複数のワークW全体の高さは、予め決められた上限値Hmax以下となるように制限される。この上限値Hmaxの範囲内において、基準カメラ40Aの撮像領域と比較カメラ40Bの撮像領域とが重複する領域は、符号Rwで示す領域となり、この有効撮像領域Rw内であれば、ステレオカメラ40により適切な視差画像情報が得られる。したがって、山積みトレイに山積みされた複数のワークの中からピックアップ対象となるワークを視差画像情報により特定する取出制御モード時の処理では、山積みトレイに山積みされた複数のワークがその有効撮像領域Rw内となるように構成する必要がある。
一方、上述した実施形態のピッキングロボット100において、一時載置トレイ4上に載置されたワークWの向きを特定するセット制御モード時の処理では、ステレオカメラ40の視差画像情報は用いず、ステレオカメラ40の基準カメラ40Aによる輝度画像情報を用いる。この輝度画像情報については、基準カメラ40Aの撮像領域内であれば適切な輝度画像情報が得られるので、必ずしも比較カメラ40Bの撮像領域と重複する領域Rwに限られない。すなわち、基準カメラ40Aによる輝度画像情報は、図13の符号Raで示す撮像領域部分(基準カメラ有効撮像領域Ra)であっても、適切に取得することができる。
そこで、本変形例1においては、山積みトレイ1に山積みされた複数のワークについてはステレオカメラ40の有効撮像領域Rw内に位置させる一方、一時載置トレイ4に載置されたワークについては、ステレオカメラ40における基準カメラ有効撮像領域Ra内に位置させるようにしている。すなわち、取出制御モードにおいて、ロボット制御部500は、山積みトレイ1から取り出したワークWを、基準カメラ40Aの撮像領域のうち、比較カメラ40Bの撮像領域と重複する有効撮像領域Rwとは異なる撮像領域部分(基準カメラ有効撮像領域Ra)に配置される一時載置トレイ4上にリリースする。これにより、ステレオカメラ40の有効撮像領域Rwの全体にわたって山積みトレイ1を配置することができ、山積みトレイ1の配置スペースが大きくても、一時載置トレイ4の配置スペースを確保することができる。
なお、本変形例1では、一時載置トレイ4上に載置されたワークWの向きを特定するセット制御モード時の処理において基準カメラ40Aによる輝度画像情報を用いる例で説明したが、比較カメラ40Bによる輝度画像情報を用いてもよい。この場合、一時載置トレイ4に載置されたワークについては、図14の符号Rbで示す撮像領域部分(比較カメラ有効撮像領域Rb)に位置させる。
また、一時載置トレイ4に載置されたワークについては、図13の符号Raで示す基準カメラ有効撮像領域Raと図14の符号Rbで示す比較カメラ有効撮像領域Rbの両方に位置させてもよい。
また、一時載置トレイ4に載置されたワークについては、図13の符号Raで示す基準カメラ有効撮像領域Raと図14の符号Rbで示す比較カメラ有効撮像領域Rbの両方に位置させてもよい。
〔変形例2〕
次に、本実施形態におけるピッキングロボット100の他の変形例(以下、本変形例を「変形例2」という。)について説明する。
本変形例2においては、ステレオカメラ40に代えて単一のカメラ40’を用い、パターン投射装置50からパターン画像を投射して単一のカメラ40’で撮像して得られる撮像画像に基づいて三次元情報を取得する。なお、単一のカメラ40と、そのカメラ40の撮像領域内に所定の測定用光を照射する測定用光照射手段とを用いて、その測定用光が照射されている撮像領域部分の三次元情報を取得するものであれば、どのような方式(例えば位相シフト法)であってもよい。なお、ここでいう測定用光とは、その方式によっては、当該撮像領域部分の三次元情報を取得するために必須のものだけでなく、当該撮像領域部分の三次元情報の取得精度を高めるためのものも含む。
次に、本実施形態におけるピッキングロボット100の他の変形例(以下、本変形例を「変形例2」という。)について説明する。
本変形例2においては、ステレオカメラ40に代えて単一のカメラ40’を用い、パターン投射装置50からパターン画像を投射して単一のカメラ40’で撮像して得られる撮像画像に基づいて三次元情報を取得する。なお、単一のカメラ40と、そのカメラ40の撮像領域内に所定の測定用光を照射する測定用光照射手段とを用いて、その測定用光が照射されている撮像領域部分の三次元情報を取得するものであれば、どのような方式(例えば位相シフト法)であってもよい。なお、ここでいう測定用光とは、その方式によっては、当該撮像領域部分の三次元情報を取得するために必須のものだけでなく、当該撮像領域部分の三次元情報の取得精度を高めるためのものも含む。
図15は、本変形例2におけるカメラ40’の撮像領域とパターン投射装置50によるパターン投射エリアとを示す説明図である。
本変形例2において、カメラ40’が撮像する撮像画像から適切な三次元情報を取得できる撮像領域は、図15に示すように、カメラ40’の撮像領域とパターン投射装置50によるパターン投射エリアとが重複する領域(パターン投射領域)Rcである。このパターン投射領域Rc内であれば、カメラ40’で撮像した撮像画像から適切な三次元情報を得ることができる。したがって、本変形例2では、山積みトレイに山積みされた複数のワークの中からピックアップ対象となるワークを特定する取出制御モード時の処理では、山積みトレイに山積みされた複数のワークがそのパターン投射領域Rc内となるように構成する。
本変形例2において、カメラ40’が撮像する撮像画像から適切な三次元情報を取得できる撮像領域は、図15に示すように、カメラ40’の撮像領域とパターン投射装置50によるパターン投射エリアとが重複する領域(パターン投射領域)Rcである。このパターン投射領域Rc内であれば、カメラ40’で撮像した撮像画像から適切な三次元情報を得ることができる。したがって、本変形例2では、山積みトレイに山積みされた複数のワークの中からピックアップ対象となるワークを特定する取出制御モード時の処理では、山積みトレイに山積みされた複数のワークがそのパターン投射領域Rc内となるように構成する。
一方、一時載置トレイ4上に載置されたワークWの向きを特定するセット制御モード時の処理では、上述した実施形態と同じく、三次元情報ではなく、二次元情報(単一のカメラによる輝度画像情報)を用いる。この輝度画像情報については、パターン投射装置50によるパターン画像が投射されている必要がなく、場合によっては、むしろパターン投射装置50によるパターン画像が投射されていない方が、適切な輝度画像情報が得られる。
そこで、本変形例2においては、一時載置トレイ4に載置されたワークについては、カメラ40’の撮像領域のうち、パターン投射装置50によるパターン画像が投射されない非パターン投射領域Rdに位置させるようにしている。すなわち、取出制御モードにおいて、ロボット制御部500は、山積みトレイ1から取り出したワークWを、カメラ40’の撮像領域のうちの非パターン投射領域Rdに配置される一時載置トレイ4上にリリースする。これにより、カメラ40’の撮像領域のうちのパターン投射領域の全体にわたって山積みトレイ1を配置することができ、山積みトレイ1の配置スペースが大きくても、一時載置トレイ4の配置スペースを確保することができる。
以上に説明したものは一例であり、次の態様毎に特有の効果を奏する。
(態様A)
複数のワークW等の対象物が置かれた山積みトレイ1等の置き部から対象物を取り出すマニピュレータ装置10と、前記置き部に置かれた複数の対象物の三次元情報(視差画像情報などの距離画像情報)に基づいて、該置き部から前記マニピュレータ装置によって取り出すべき対象物を認識するステレオカメラ40及びロボット制御部500等の取出用認識手段と、前記マニピュレータ装置が取り出した対象物の向きを認識するステレオカメラ40及びロボット制御部500等の向き認識手段と、前記取出用認識手段が認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出すように該マニピュレータ装置を制御する取り出し制御、及び、取り出した対象物を、該取り出し制御で制御されるマニピュレータ装置を用いて所定の向きでパレット2等の受け部へ受け渡すように、前記向き認識手段による認識結果に基づいて該マニピュレータ装置を制御する受け渡し制御を実行する制御手段とを有することを特徴とするマニピュレータシステム。
従来のマニピュレータシステムの中には、山積み状態のような未整理状態の複数の対象物(ワーク)を撮像手段で撮像し、その撮像画像に基づいて認識した対象物をマニピュレータ装置で保持して所定の場所へ取り出すものがある。しかしながら、未整理状態の複数の対象物を撮像した撮像画像からは、マニピュレータ装置で保持すべき対象物の位置を高精度に安定して認識することはできても、その対象物の向き(対象物の姿勢を含む。)までも高精度に安定して認識することは難しい。これは、撮像画像中において複数の対象物が重なって映し出されるため、個々の対象物を他の対象物と明確に区別して認識することが難しいためである。そのため、従来のマニピュレータシステムでは、未整理状態の複数の対象物の中から選択される対象物を所定の場所へ単に取り出すという作業はマニピュレータ装置で自動化できても、その取り出したマニピュレータ装置そのもので、対象物を所定の受け部へ所定の向きで受け渡すという受け渡し作業を行うことはできなかった。
一方で、未整理状態の複数の対象物を互いに重ならないように整理する整理作業を事前に行っておけば、その整理された個々の対象物の向きを高精度に安定して認識することが可能である。整理された状態であれば、撮像画像において複数の対象物が重なって映し出されることがなく、個々の対象物を他の対象物と明確に区別して認識することが容易であり、その対象物の向きを高精度に安定して認識することが可能だからである。したがって、未整理状態の複数の対象物の中から選択される対象物をマニピュレータ装置で整理された状態になるように取り出す作業と、これにより整理された対象物をマニピュレータ装置で所定の受け部へ所定の向きで受け渡すという受け渡し作業を行うことは可能である。
しかしながら、既存のマニピュレータシステムでは、未整理状態の複数の対象物の中から選択される対象物をマニピュレータ装置で整理された状態になるように取り出す作業と、これにより整理された対象物をマニピュレータ装置で所定の受け部へ所定の向きで受け渡すという受け渡し作業とを、それぞれ個別のマニピュレータ装置を備えた2つのマニピュレータシステムで実現する必要があった。そのため、これらの作業を一連の作業として自動化するにはコストが高騰するという問題があった。
本態様によれば、複数の対象物が置かれた置き部から対象物を取り出す作業と、取り出した対象物を所定の向きで受け部へ受け渡す作業とが、共通のマニピュレータ装置によって行われる。したがって、それぞれの作業を個別のマニピュレータ装置によって行われる構成と比較して、部品コストを低く抑えることができる。特に、マニピュレータシステムを構成する部品の中でマニピュレータ装置の部品コストが占める割合は相対的に高いことが多いので、マニピュレータ装置の共通化による部品コストの低減効果は高い。したがって、本態様によれば、未整理状態の複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、低コストで実現できる。
(態様A)
複数のワークW等の対象物が置かれた山積みトレイ1等の置き部から対象物を取り出すマニピュレータ装置10と、前記置き部に置かれた複数の対象物の三次元情報(視差画像情報などの距離画像情報)に基づいて、該置き部から前記マニピュレータ装置によって取り出すべき対象物を認識するステレオカメラ40及びロボット制御部500等の取出用認識手段と、前記マニピュレータ装置が取り出した対象物の向きを認識するステレオカメラ40及びロボット制御部500等の向き認識手段と、前記取出用認識手段が認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出すように該マニピュレータ装置を制御する取り出し制御、及び、取り出した対象物を、該取り出し制御で制御されるマニピュレータ装置を用いて所定の向きでパレット2等の受け部へ受け渡すように、前記向き認識手段による認識結果に基づいて該マニピュレータ装置を制御する受け渡し制御を実行する制御手段とを有することを特徴とするマニピュレータシステム。
従来のマニピュレータシステムの中には、山積み状態のような未整理状態の複数の対象物(ワーク)を撮像手段で撮像し、その撮像画像に基づいて認識した対象物をマニピュレータ装置で保持して所定の場所へ取り出すものがある。しかしながら、未整理状態の複数の対象物を撮像した撮像画像からは、マニピュレータ装置で保持すべき対象物の位置を高精度に安定して認識することはできても、その対象物の向き(対象物の姿勢を含む。)までも高精度に安定して認識することは難しい。これは、撮像画像中において複数の対象物が重なって映し出されるため、個々の対象物を他の対象物と明確に区別して認識することが難しいためである。そのため、従来のマニピュレータシステムでは、未整理状態の複数の対象物の中から選択される対象物を所定の場所へ単に取り出すという作業はマニピュレータ装置で自動化できても、その取り出したマニピュレータ装置そのもので、対象物を所定の受け部へ所定の向きで受け渡すという受け渡し作業を行うことはできなかった。
一方で、未整理状態の複数の対象物を互いに重ならないように整理する整理作業を事前に行っておけば、その整理された個々の対象物の向きを高精度に安定して認識することが可能である。整理された状態であれば、撮像画像において複数の対象物が重なって映し出されることがなく、個々の対象物を他の対象物と明確に区別して認識することが容易であり、その対象物の向きを高精度に安定して認識することが可能だからである。したがって、未整理状態の複数の対象物の中から選択される対象物をマニピュレータ装置で整理された状態になるように取り出す作業と、これにより整理された対象物をマニピュレータ装置で所定の受け部へ所定の向きで受け渡すという受け渡し作業を行うことは可能である。
しかしながら、既存のマニピュレータシステムでは、未整理状態の複数の対象物の中から選択される対象物をマニピュレータ装置で整理された状態になるように取り出す作業と、これにより整理された対象物をマニピュレータ装置で所定の受け部へ所定の向きで受け渡すという受け渡し作業とを、それぞれ個別のマニピュレータ装置を備えた2つのマニピュレータシステムで実現する必要があった。そのため、これらの作業を一連の作業として自動化するにはコストが高騰するという問題があった。
本態様によれば、複数の対象物が置かれた置き部から対象物を取り出す作業と、取り出した対象物を所定の向きで受け部へ受け渡す作業とが、共通のマニピュレータ装置によって行われる。したがって、それぞれの作業を個別のマニピュレータ装置によって行われる構成と比較して、部品コストを低く抑えることができる。特に、マニピュレータシステムを構成する部品の中でマニピュレータ装置の部品コストが占める割合は相対的に高いことが多いので、マニピュレータ装置の共通化による部品コストの低減効果は高い。したがって、本態様によれば、未整理状態の複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、低コストで実現できる。
(態様B)
前記態様Aにおいて、少なくとも前記置き部に置かれた複数の対象物と前記マニピュレータ装置により取り出された対象物とを含む撮像領域を撮像するステレオカメラ40等の撮像手段を有し、前記取出用認識手段は、前記撮像手段により撮像した撮像画像(視差画像)を用いて生成される三次元情報に基づいて、前記マニピュレータ装置によって取り出すべき対象物を認識し、前記向き認識手段は、前記撮像手段により撮像した撮像画像(輝度画像)を用いて前記マニピュレータ装置が取り出した対象物の向きを認識することを特徴とする。
これによれば、複数の対象物が置かれた置き部から対象物を取り出す作業時に用いる撮像手段と、取り出した対象物を所定の向きで受け部へ受け渡す作業時に用いる撮像手段として、共通の撮像手段が用いられる。そのため、それぞれの作業時に個別の撮像手段を用いる場合と比較して、部品コストを低く抑えることができる。したがって、本態様によれば、未整理状態の複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、更に低コストで実現できる。
なお、ここでいう撮像手段とは、撮像領域内における位置とその位置の特性情報とが関連付けられた情報を取得できる手段であればよい。したがって、撮像領域内における位置とその位置の距離情報とを含む距離画像情報を取得するステレオカメラ、位相シフト法、TOF法、光切断法による画像取得手段、あるいは、撮像領域内における位置とその位置の光学的情報(輝度、偏光成分、特定波長帯の光量など)を取得する画像取得手段など、あらゆる撮像手段が含まれる。
前記態様Aにおいて、少なくとも前記置き部に置かれた複数の対象物と前記マニピュレータ装置により取り出された対象物とを含む撮像領域を撮像するステレオカメラ40等の撮像手段を有し、前記取出用認識手段は、前記撮像手段により撮像した撮像画像(視差画像)を用いて生成される三次元情報に基づいて、前記マニピュレータ装置によって取り出すべき対象物を認識し、前記向き認識手段は、前記撮像手段により撮像した撮像画像(輝度画像)を用いて前記マニピュレータ装置が取り出した対象物の向きを認識することを特徴とする。
これによれば、複数の対象物が置かれた置き部から対象物を取り出す作業時に用いる撮像手段と、取り出した対象物を所定の向きで受け部へ受け渡す作業時に用いる撮像手段として、共通の撮像手段が用いられる。そのため、それぞれの作業時に個別の撮像手段を用いる場合と比較して、部品コストを低く抑えることができる。したがって、本態様によれば、未整理状態の複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、更に低コストで実現できる。
なお、ここでいう撮像手段とは、撮像領域内における位置とその位置の特性情報とが関連付けられた情報を取得できる手段であればよい。したがって、撮像領域内における位置とその位置の距離情報とを含む距離画像情報を取得するステレオカメラ、位相シフト法、TOF法、光切断法による画像取得手段、あるいは、撮像領域内における位置とその位置の光学的情報(輝度、偏光成分、特定波長帯の光量など)を取得する画像取得手段など、あらゆる撮像手段が含まれる。
(態様C)
前記態様Bにおいて、前記撮像手段は、前記置き部に置かれた複数の対象物をそれぞれの撮像領域の一部分(有効撮像領域Rw)に含む基準カメラ40A及び比較カメラ40B等の複数の撮像部を備え、前記制御手段は、前記向き認識手段が用いる撮像画像を撮像する際に、前記複数の撮像部のうちの一部の撮像部(基準カメラ40A)における撮像領域の他部分(基準カメラ有効撮像領域Ra)に前記マニピュレータ装置により取り出された対象物が位置するように、前記取り出し制御を実行することを特徴とする。
これによれば、上述した変形例1で説明したとおり、取り出す作業時と、受け渡す作業時とで共通の撮像手段が用いる場合でも、置き部の配置スペースと、そこから取り出した対象物が位置するスペースとを確保することができる。
前記態様Bにおいて、前記撮像手段は、前記置き部に置かれた複数の対象物をそれぞれの撮像領域の一部分(有効撮像領域Rw)に含む基準カメラ40A及び比較カメラ40B等の複数の撮像部を備え、前記制御手段は、前記向き認識手段が用いる撮像画像を撮像する際に、前記複数の撮像部のうちの一部の撮像部(基準カメラ40A)における撮像領域の他部分(基準カメラ有効撮像領域Ra)に前記マニピュレータ装置により取り出された対象物が位置するように、前記取り出し制御を実行することを特徴とする。
これによれば、上述した変形例1で説明したとおり、取り出す作業時と、受け渡す作業時とで共通の撮像手段が用いる場合でも、置き部の配置スペースと、そこから取り出した対象物が位置するスペースとを確保することができる。
(態様D)
前記態様Cにおいて、前記向き認識手段は、前記撮像手段のいずれかの撮像部(基準カメラ40A等)で撮像した単一の撮像画像(基準画像等)を用いて前記マニピュレータ装置が取り出した対象物の向きを認識することを特徴とする。
これによれば、取出用認識手段では、複数の撮像画像から視差画像情報等の三次元形状情報を得ることができるため、山積み状態等の未整理状態である複数の対象物の中からマニピュレータ装置によって取り出すべき対象物を高精度で認識できる。また、向き認識手段では、単一の撮像画像から輝度画像情報等の二次元形状情報を得ることができるため、取り出された対象物の向きを高精度で認識できる。
前記態様Cにおいて、前記向き認識手段は、前記撮像手段のいずれかの撮像部(基準カメラ40A等)で撮像した単一の撮像画像(基準画像等)を用いて前記マニピュレータ装置が取り出した対象物の向きを認識することを特徴とする。
これによれば、取出用認識手段では、複数の撮像画像から視差画像情報等の三次元形状情報を得ることができるため、山積み状態等の未整理状態である複数の対象物の中からマニピュレータ装置によって取り出すべき対象物を高精度で認識できる。また、向き認識手段では、単一の撮像画像から輝度画像情報等の二次元形状情報を得ることができるため、取り出された対象物の向きを高精度で認識できる。
(態様E)
前記態様Bにおいて、前記置き部に置かれた複数の対象物へパターン画像等の所定の測定用光を照射するパターン投射装置50等の測定用光照射手段を有し、前記制御手段は、前記向き認識手段が用いる撮像画像を撮像する際、前記マニピュレータ装置により取り出された対象物が、前記測定用光照射手段により前記所定の測定用光が照射されていない非パターン投射領域Rd等の撮像領域部分に位置するように、前記取り出し制御を実行することを特徴とする。
これによれば、上述した変形例2で説明したとおり、取り出す作業時と、受け渡す作業時とで共通の撮像手段が用いる場合でも、置き部の配置スペースと、そこから取り出した対象物が位置するスペースとを確保することができる。
前記態様Bにおいて、前記置き部に置かれた複数の対象物へパターン画像等の所定の測定用光を照射するパターン投射装置50等の測定用光照射手段を有し、前記制御手段は、前記向き認識手段が用いる撮像画像を撮像する際、前記マニピュレータ装置により取り出された対象物が、前記測定用光照射手段により前記所定の測定用光が照射されていない非パターン投射領域Rd等の撮像領域部分に位置するように、前記取り出し制御を実行することを特徴とする。
これによれば、上述した変形例2で説明したとおり、取り出す作業時と、受け渡す作業時とで共通の撮像手段が用いる場合でも、置き部の配置スペースと、そこから取り出した対象物が位置するスペースとを確保することができる。
(態様F)
前記態様A乃至Eのいずれかの態様において、前記取り出し制御では、前記マニピュレータ装置が保持した対象物を前記置き部の外部に位置する一時載置トレイ4等の一時載置部に載置するように、該マニピュレータ装置を制御し、前記向き認識手段は、前記一時載置部に載置された対象物の向きを認識し、前記受け渡し制御では、前記一時載置部に載置された対象物を前記マニピュレータ装置で再保持して前記受け部へ受け渡すように、該マニピュレータ装置を制御することを特徴とする。
これによれば、置き部から取り出した対象物をマニピュレータ装置に保持したまま、向き認識手段により対象物の向きを認識する場合よりも、対象物の向きの認識精度を高めることができる。
前記態様A乃至Eのいずれかの態様において、前記取り出し制御では、前記マニピュレータ装置が保持した対象物を前記置き部の外部に位置する一時載置トレイ4等の一時載置部に載置するように、該マニピュレータ装置を制御し、前記向き認識手段は、前記一時載置部に載置された対象物の向きを認識し、前記受け渡し制御では、前記一時載置部に載置された対象物を前記マニピュレータ装置で再保持して前記受け部へ受け渡すように、該マニピュレータ装置を制御することを特徴とする。
これによれば、置き部から取り出した対象物をマニピュレータ装置に保持したまま、向き認識手段により対象物の向きを認識する場合よりも、対象物の向きの認識精度を高めることができる。
(態様G)
前記態様A乃至Eのいずれかの態様において、前記向き認識手段は、前記マニピュレータ装置が対象物を保持した状態で該対象物の向きを認識し、前記受け渡し制御では、前記取り出し制御の際に前記マニピュレータ装置が保持した対象物を、そのまま保持し続けた状態で前記受け部へ受け渡すように、該マニピュレータ装置を制御することを特徴とする。
これによれば、置き部から取り出した対象物を一時載置部に一時的に載置して向き認識手段により対象物の向きを認識する場合よりも、迅速な処理が可能となる。
前記態様A乃至Eのいずれかの態様において、前記向き認識手段は、前記マニピュレータ装置が対象物を保持した状態で該対象物の向きを認識し、前記受け渡し制御では、前記取り出し制御の際に前記マニピュレータ装置が保持した対象物を、そのまま保持し続けた状態で前記受け部へ受け渡すように、該マニピュレータ装置を制御することを特徴とする。
これによれば、置き部から取り出した対象物を一時載置部に一時的に載置して向き認識手段により対象物の向きを認識する場合よりも、迅速な処理が可能となる。
(態様H)
前記態様A乃至Gのいずれかの態様において、前記マニピュレータ装置は、少なくとも1つの関節部11,12,14,15,17と、該関節部を駆動させる関節駆動装置501〜505等の駆動手段と、該関節部に取り付けられた少なくとも1つのアーム部13,16と、前記対象物を保持するハンド部20等の保持部とを有し、前記関節部を駆動することにより前記保持部を移動させるものであり、前記保持部は、保持している対象物を所定の回転軸回りに回転させて、該対象物の姿勢を、前記関節部の駆動により前記受け部へ該対象物を受け渡す位置に該保持部を移動させたときの該対象物の向きが前記所定の向きとなる受け渡し姿勢へと姿勢変化させるハンド回転機構26等の回転機構を有することを特徴とする。
これによれば、マニピュレータ装置における各関節部の駆動量を最小限に抑えて、より短時間で対象物を所定の向きで受け部へ受け渡すことができる。
前記態様A乃至Gのいずれかの態様において、前記マニピュレータ装置は、少なくとも1つの関節部11,12,14,15,17と、該関節部を駆動させる関節駆動装置501〜505等の駆動手段と、該関節部に取り付けられた少なくとも1つのアーム部13,16と、前記対象物を保持するハンド部20等の保持部とを有し、前記関節部を駆動することにより前記保持部を移動させるものであり、前記保持部は、保持している対象物を所定の回転軸回りに回転させて、該対象物の姿勢を、前記関節部の駆動により前記受け部へ該対象物を受け渡す位置に該保持部を移動させたときの該対象物の向きが前記所定の向きとなる受け渡し姿勢へと姿勢変化させるハンド回転機構26等の回転機構を有することを特徴とする。
これによれば、マニピュレータ装置における各関節部の駆動量を最小限に抑えて、より短時間で対象物を所定の向きで受け部へ受け渡すことができる。
(態様I)
第一撮像エリアを基準カメラ40A及び比較カメラ40B等の複数の撮像部により撮像して複数の撮像画像を取得するとともに、該第一撮像エリアとは別の第二撮像エリアを該複数の撮像部のうちの一部の撮像部により撮像して撮像画像を取得する撮像システムであって、前記複数の撮像部は、各撮像部の撮像領域の一部分(有効撮像領域Rw等)に前記第一撮像エリアがそれぞれ含まれるとともに、前記一部の撮像部(基準カメラ40A等)の撮像領域の他部分(基準カメラ有効撮像領域Ra等)に前記第二撮像エリアが含まれ、かつ、前記複数の撮像部のうちの他の撮像部(比較カメラ40B等)の撮像領域に前記第二撮像エリアが含まれないように、設置されることを特徴とする。
これによれば、上述した変形例1で説明したとおり、第一撮像エリアの視差情報等の三次元情報を得るための複数の撮像画像と、第二撮像エリアの撮像画像とを、共通の撮像手段で撮像する場合でも、それぞれの撮像エリアを十分に確保することができる。
第一撮像エリアを基準カメラ40A及び比較カメラ40B等の複数の撮像部により撮像して複数の撮像画像を取得するとともに、該第一撮像エリアとは別の第二撮像エリアを該複数の撮像部のうちの一部の撮像部により撮像して撮像画像を取得する撮像システムであって、前記複数の撮像部は、各撮像部の撮像領域の一部分(有効撮像領域Rw等)に前記第一撮像エリアがそれぞれ含まれるとともに、前記一部の撮像部(基準カメラ40A等)の撮像領域の他部分(基準カメラ有効撮像領域Ra等)に前記第二撮像エリアが含まれ、かつ、前記複数の撮像部のうちの他の撮像部(比較カメラ40B等)の撮像領域に前記第二撮像エリアが含まれないように、設置されることを特徴とする。
これによれば、上述した変形例1で説明したとおり、第一撮像エリアの視差情報等の三次元情報を得るための複数の撮像画像と、第二撮像エリアの撮像画像とを、共通の撮像手段で撮像する場合でも、それぞれの撮像エリアを十分に確保することができる。
(態様J)
第一撮像エリアを撮像手段により撮像して撮像画像を取得するとともに、該第一撮像エリアとは別の第二撮像エリアを、該第一撮像エリアの撮像に用いられる撮像手段によって撮像して撮像画像を取得する撮像システムであって、前記第一撮像エリアには所定の測定用光を照射するが、前記第二撮像エリアには該所定の測定用光を照射しない測定用光照射手段を有することを特徴とする。
これによれば、上述した変形例2で説明したとおり、測定用光が照射される第一撮像エリアの三次元情報を得るための撮像画像と、測定用光が照射されない第二撮像エリアの撮像画像とを、共通の撮像手段で撮像する場合でも、それぞれの撮像エリアを十分に確保することができる。
第一撮像エリアを撮像手段により撮像して撮像画像を取得するとともに、該第一撮像エリアとは別の第二撮像エリアを、該第一撮像エリアの撮像に用いられる撮像手段によって撮像して撮像画像を取得する撮像システムであって、前記第一撮像エリアには所定の測定用光を照射するが、前記第二撮像エリアには該所定の測定用光を照射しない測定用光照射手段を有することを特徴とする。
これによれば、上述した変形例2で説明したとおり、測定用光が照射される第一撮像エリアの三次元情報を得るための撮像画像と、測定用光が照射されない第二撮像エリアの撮像画像とを、共通の撮像手段で撮像する場合でも、それぞれの撮像エリアを十分に確保することができる。
(態様K)
前記態様I又はKにおいて、前記第一撮像エリアの撮像画像に基づいて該第一撮像エリアに配置された撮像対象物の三次元情報を取得し、前記第二撮像エリアの撮像画像に基づいて該第二撮像エリアに配置された撮像対象物の向きの情報を取得することを特徴とする。
これによれば、上述した変形例1や2で説明したとおり、第一撮像エリアに配置された撮像対象物の三次元情報と、第二撮像エリアに配置された撮像対象物の向きの情報とを、共通の撮像手段により取得することができる。
前記態様I又はKにおいて、前記第一撮像エリアの撮像画像に基づいて該第一撮像エリアに配置された撮像対象物の三次元情報を取得し、前記第二撮像エリアの撮像画像に基づいて該第二撮像エリアに配置された撮像対象物の向きの情報を取得することを特徴とする。
これによれば、上述した変形例1や2で説明したとおり、第一撮像エリアに配置された撮像対象物の三次元情報と、第二撮像エリアに配置された撮像対象物の向きの情報とを、共通の撮像手段により取得することができる。
(態様L)
置き部に置かれた複数の対象物の三次元情報に基づいて、該置き部からマニピュレータ装置によって取り出すべき対象物を認識する取出用認識工程と、前記取出用認識工程で認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出す取出工程と、前記取出工程で前記マニピュレータ装置が取り出した対象物の向きを認識する向き認識工程と、前記向き認識工程で向きを認識した対象物を、前記取出工程で用いたマニピュレータ装置を用いて、所定の向きで受け部へ受け渡す受け渡し工程とを有することを特徴とする対象物の受け渡し方法。
本態様によれば、未整理状態で置き部に置かれた複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、低コストで実現できる。
置き部に置かれた複数の対象物の三次元情報に基づいて、該置き部からマニピュレータ装置によって取り出すべき対象物を認識する取出用認識工程と、前記取出用認識工程で認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出す取出工程と、前記取出工程で前記マニピュレータ装置が取り出した対象物の向きを認識する向き認識工程と、前記向き認識工程で向きを認識した対象物を、前記取出工程で用いたマニピュレータ装置を用いて、所定の向きで受け部へ受け渡す受け渡し工程とを有することを特徴とする対象物の受け渡し方法。
本態様によれば、未整理状態で置き部に置かれた複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、低コストで実現できる。
(態様M)
複数の対象物が置かれた置き部から対象物を取り出すマニピュレータ装置と、前記置き部から前記マニピュレータ装置によって取り出すべき対象物を認識する取出用認識手段と、前記マニピュレータ装置が取り出した対象物の向きを認識する向き認識手段と、前記マニピュレータ装置を制御するロボット制御部500等の制御手段とを有するマニピュレータシステムのコンピュータを、前記取出用認識手段、前記向き認識手段及び前記制御手段として機能させるためのマニピュレータ制御プログラムであって、前記取出用認識手段は、前記置き部に置かれた複数の対象物の三次元情報に基づいて、該置き部から前記マニピュレータ装置によって取り出すべき対象物を認識し、前記制御手段は、前記取出用認識手段が認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出すように該マニピュレータ装置を制御する取り出し制御、及び、取り出した対象物を、該取り出し制御で制御されるマニピュレータ装置を用いて所定の向きで受け部へ受け渡すように、前記向き認識手段による認識結果に基づいて該マニピュレータ装置を制御する受け渡し制御を実行することを特徴とする。
本態様によれば、未整理状態で置き部に置かれた複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、低コストで実現できる。
複数の対象物が置かれた置き部から対象物を取り出すマニピュレータ装置と、前記置き部から前記マニピュレータ装置によって取り出すべき対象物を認識する取出用認識手段と、前記マニピュレータ装置が取り出した対象物の向きを認識する向き認識手段と、前記マニピュレータ装置を制御するロボット制御部500等の制御手段とを有するマニピュレータシステムのコンピュータを、前記取出用認識手段、前記向き認識手段及び前記制御手段として機能させるためのマニピュレータ制御プログラムであって、前記取出用認識手段は、前記置き部に置かれた複数の対象物の三次元情報に基づいて、該置き部から前記マニピュレータ装置によって取り出すべき対象物を認識し、前記制御手段は、前記取出用認識手段が認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出すように該マニピュレータ装置を制御する取り出し制御、及び、取り出した対象物を、該取り出し制御で制御されるマニピュレータ装置を用いて所定の向きで受け部へ受け渡すように、前記向き認識手段による認識結果に基づいて該マニピュレータ装置を制御する受け渡し制御を実行することを特徴とする。
本態様によれば、未整理状態で置き部に置かれた複数の対象物の中から選択される対象物を取り出し、その対象物を所定の受け部へ所定の向きで受け渡すという一連の作業の自動化を、低コストで実現できる。
なお、このプログラムは、CD−ROM等の記録媒体に記録された状態で配布したり、入手したりすることができる。また、このプログラムを乗せ、所定の送信装置により送信された信号を、公衆電話回線や専用線、その他の通信網等の伝送媒体を介して配信したり、受信したりすることでも、配布、入手が可能である。この配信の際、伝送媒体中には、コンピュータプログラムの少なくとも一部が伝送されていればよい。すなわち、コンピュータプログラムを構成するすべてのデータが、一時に伝送媒体上に存在している必要はない。このプログラムを乗せた信号とは、コンピュータプログラムを含む所定の搬送波に具現化されたコンピュータデータ信号である。また、所定の送信装置からコンピュータプログラムを送信する送信方法には、プログラムを構成するデータを連続的に送信する場合も、断続的に送信する場合も含まれる。
1 山積みトレイ
2 パレット
2a 対応溝
3 マガジン
4 一時載置トレイ
10 マニピュレータ装置
11,12,14,15,17 関節部
13,16 アーム部
20 ハンド部
21 ワーク吸着部
21a 回転軸
22 吸引孔
23 規制壁
24 ワーク吸着用ポンプ
25 ワーク保持位置調整装置
25a,25b 挟持アーム
26 ハンド回転機構
30 パレット移送機構
40 ステレオカメラ
40A 基準カメラ
40B 比較カメラ
50 パターン投射装置
100 ピッキングロボット
200 外観検査装置
300 マガジン収容部
500 ロボット制御部
501〜505 関節駆動装置
506 記憶部
600 システム制御部
W ワーク
Wa マークピン
Wp コネクタピン
2 パレット
2a 対応溝
3 マガジン
4 一時載置トレイ
10 マニピュレータ装置
11,12,14,15,17 関節部
13,16 アーム部
20 ハンド部
21 ワーク吸着部
21a 回転軸
22 吸引孔
23 規制壁
24 ワーク吸着用ポンプ
25 ワーク保持位置調整装置
25a,25b 挟持アーム
26 ハンド回転機構
30 パレット移送機構
40 ステレオカメラ
40A 基準カメラ
40B 比較カメラ
50 パターン投射装置
100 ピッキングロボット
200 外観検査装置
300 マガジン収容部
500 ロボット制御部
501〜505 関節駆動装置
506 記憶部
600 システム制御部
W ワーク
Wa マークピン
Wp コネクタピン
Claims (13)
- 複数の対象物が置かれた置き部から対象物を取り出すマニピュレータ装置と、
前記置き部に置かれた複数の対象物の三次元情報に基づいて、該置き部から前記マニピュレータ装置によって取り出すべき対象物を認識する取出用認識手段と、
前記マニピュレータ装置が取り出した対象物の向きを認識する向き認識手段と、
前記取出用認識手段が認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出すように該マニピュレータ装置を制御する取り出し制御、及び、取り出した対象物を、該取り出し制御で制御されるマニピュレータ装置を用いて所定の向きで受け部へ受け渡すように、前記向き認識手段による認識結果に基づいて該マニピュレータ装置を制御する受け渡し制御を実行する制御手段とを有することを特徴とするマニピュレータシステム。 - 請求項1に記載のマニピュレータシステムにおいて、
少なくとも前記置き部に置かれた複数の対象物と前記マニピュレータ装置により取り出された対象物とを含む撮像領域を撮像する撮像手段を有し、
前記取出用認識手段は、前記撮像手段により撮像した撮像画像を用いて生成される三次元情報に基づいて、前記マニピュレータ装置によって取り出すべき対象物を認識し、
前記向き認識手段は、前記撮像手段により撮像した撮像画像を用いて前記マニピュレータ装置が取り出した対象物の向きを認識することを特徴とするマニピュレータシステム。 - 請求項2に記載のマニピュレータシステムにおいて、
前記撮像手段は、前記置き部に置かれた複数の対象物をそれぞれの撮像領域の一部分に含む複数の撮像部を備え、
前記制御手段は、前記向き認識手段が用いる撮像画像を撮像する際に、前記複数の撮像部のうちの一部の撮像部における撮像領域の他部分に前記マニピュレータ装置により取り出された対象物が位置するように、前記取り出し制御を実行することを特徴とするマニピュレータシステム。 - 請求項3に記載のマニピュレータシステムにおいて、
前記向き認識手段は、前記撮像手段のいずれかの撮像部で撮像した単一の撮像画像を用いて前記マニピュレータ装置が取り出した対象物の向きを認識することを特徴とするマニピュレータシステム。 - 請求項2に記載のマニピュレータシステムにおいて、
前記置き部に置かれた複数の対象物へ所定の測定用光を照射する測定用光照射手段を有し、
前記制御手段は、前記向き認識手段が用いる撮像画像を撮像する際、前記マニピュレータ装置により取り出された対象物が、前記測定用光照射手段により前記所定の測定用光が照射されていない撮像領域部分に位置するように、前記取り出し制御を実行することを特徴とするマニピュレータシステム。 - 請求項1乃至5のいずれか1項に記載のマニピュレータシステムにおいて、
前記取り出し制御では、前記マニピュレータ装置が保持した対象物を前記置き部の外部に位置する一時載置部に載置するように、該マニピュレータ装置を制御し、
前記向き認識手段は、前記一時載置部に載置された対象物の向きを認識し、
前記受け渡し制御では、前記一時載置部に載置された対象物を前記マニピュレータ装置で再保持して前記受け部へ受け渡すように、該マニピュレータ装置を制御することを特徴とするマニピュレータシステム。 - 請求項1乃至5のいずれか1項に記載のマニピュレータシステムにおいて、
前記向き認識手段は、前記マニピュレータ装置が対象物を保持した状態で該対象物の向きを認識し、
前記受け渡し制御では、前記取り出し制御の際に前記マニピュレータ装置が保持した対象物を、そのまま保持し続けた状態で前記受け部へ受け渡すように、該マニピュレータ装置を制御することを特徴とするマニピュレータシステム。 - 請求項1乃至7のいずれか1項に記載のマニピュレータシステムにおいて、
前記マニピュレータ装置は、少なくとも1つの関節部と、該関節部を駆動させる駆動手段と、該関節部に取り付けられた少なくとも1つのアーム部と、前記対象物を保持する保持部とを有し、前記関節部を駆動することにより前記保持部を移動させるものであり、
前記保持部は、保持している対象物を所定の回転軸回りに回転させて、該対象物の姿勢を、前記関節部の駆動により前記受け部へ該対象物を受け渡す位置に該保持部を移動させたときの該対象物の向きが前記所定の向きとなる受け渡し姿勢へと姿勢変化させる回転機構を有することを特徴とするマニピュレータシステム。 - 第一撮像エリアを複数の撮像部により撮像して複数の撮像画像を取得するとともに、該第一撮像エリアとは別の第二撮像エリアを該複数の撮像部のうちの一部の撮像部により撮像して撮像画像を取得する撮像システムであって、
前記複数の撮像部は、各撮像部の撮像領域の一部分に前記第一撮像エリアがそれぞれ含まれるとともに、前記一部の撮像部の撮像領域の他部分に前記第二撮像エリアが含まれ、かつ、前記複数の撮像部のうちの他の撮像部の撮像領域に前記第二撮像エリアが含まれないように、設置されることを特徴とする撮像システム。 - 第一撮像エリアを撮像手段により撮像して撮像画像を取得するとともに、該第一撮像エリアとは別の第二撮像エリアを、該第一撮像エリアの撮像に用いられる撮像手段によって撮像して撮像画像を取得する撮像システムであって、
前記第一撮像エリアには所定の測定用光を照射するが、前記第二撮像エリアには該所定の測定用光を照射しない測定用光照射手段を有することを特徴とする撮像システム。 - 請求項9又は10に記載の撮像システムにおいて、
前記第一撮像エリアの撮像画像に基づいて該第一撮像エリアに配置された撮像対象物の三次元情報を取得し、
前記第二撮像エリアの撮像画像に基づいて該第二撮像エリアに配置された撮像対象物の向きの情報を取得することを特徴とする撮像システム。 - 置き部に置かれた複数の対象物の三次元情報に基づいて、該置き部からマニピュレータ装置によって取り出すべき対象物を認識する取出用認識工程と、
前記取出用認識工程で認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出す取出工程と、
前記取出工程で前記マニピュレータ装置が取り出した対象物の向きを認識する向き認識工程と、
前記向き認識工程で向きを認識した対象物を、前記取出工程で用いたマニピュレータ装置を用いて、所定の向きで受け部へ受け渡す受け渡し工程とを有することを特徴とする対象物の受け渡し方法。 - 複数の対象物が置かれた置き部から対象物を取り出すマニピュレータ装置と、前記置き部から前記マニピュレータ装置によって取り出すべき対象物を認識する取出用認識手段と、前記マニピュレータ装置が取り出した対象物の向きを認識する向き認識手段と、前記マニピュレータ装置を制御する制御手段とを有するマニピュレータシステムのコンピュータを、前記取出用認識手段、前記向き認識手段及び前記制御手段として機能させるためのマニピュレータ制御プログラムであって、
前記取出用認識手段は、前記置き部に置かれた複数の対象物の三次元情報に基づいて、該置き部から前記マニピュレータ装置によって取り出すべき対象物を認識し、
前記制御手段は、前記取出用認識手段が認識した対象物を前記マニピュレータ装置で保持して前記置き部の外部へ取り出すように該マニピュレータ装置を制御する取り出し制御、及び、取り出した対象物を、該取り出し制御で制御されるマニピュレータ装置を用いて所定の向きで受け部へ受け渡すように、前記向き認識手段による認識結果に基づいて該マニピュレータ装置を制御する受け渡し制御を実行することを特徴とするマニピュレータ制御プログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015233659A JP2017100214A (ja) | 2015-11-30 | 2015-11-30 | マニピュレータシステム、撮像システム、対象物の受け渡し方法、及び、マニピュレータ制御プログラム |
| EP16201018.5A EP3173194B1 (en) | 2015-11-30 | 2016-11-29 | Manipulator system, image capturing system, transfer method of object, and carrier medium |
| CN201611102665.9A CN106808485A (zh) | 2015-11-30 | 2016-11-29 | 操纵系统、摄像系统、对象物交付方法 |
| US15/363,667 US20170151673A1 (en) | 2015-11-30 | 2016-11-29 | Manipulator system, and image capturing system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015233659A JP2017100214A (ja) | 2015-11-30 | 2015-11-30 | マニピュレータシステム、撮像システム、対象物の受け渡し方法、及び、マニピュレータ制御プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017100214A true JP2017100214A (ja) | 2017-06-08 |
Family
ID=57460327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015233659A Pending JP2017100214A (ja) | 2015-11-30 | 2015-11-30 | マニピュレータシステム、撮像システム、対象物の受け渡し方法、及び、マニピュレータ制御プログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20170151673A1 (ja) |
| EP (1) | EP3173194B1 (ja) |
| JP (1) | JP2017100214A (ja) |
| CN (1) | CN106808485A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019141943A (ja) * | 2018-02-19 | 2019-08-29 | ファナック株式会社 | ロボットの動作をシミュレーションするシミュレーション装置 |
| WO2020009148A1 (ja) * | 2018-07-03 | 2020-01-09 | コマツ産機株式会社 | ワーク搬送システムおよびワーク搬送方法 |
| JP2020201158A (ja) * | 2019-06-11 | 2020-12-17 | 株式会社島津製作所 | 立体物の外観検査装置および立体物の外観検査方法 |
| JP2021096081A (ja) * | 2019-12-13 | 2021-06-24 | 倉敷紡績株式会社 | コネクタの3次元計測方法、コネクタの把持位置算出方法、コネクタの把持方法、コネクタの接続方法およびコネクタ |
| JP2022507856A (ja) * | 2018-11-22 | 2022-01-18 | フンボルト ビー.ブイ. | 工業規模での動物の食肉処理中における、死骸および/またはカーカス部を位置決めするおよび/または処理する、方法および装置 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10360531B1 (en) * | 2016-12-19 | 2019-07-23 | Amazon Technologies, Inc. | Robot implemented item manipulation |
| WO2018179429A1 (ja) * | 2017-03-31 | 2018-10-04 | 株式会社Fuji | 対基板作業機 |
| AT520957A1 (de) * | 2018-03-09 | 2019-09-15 | Tgw Logistics Group Gmbh | Robotersystem zur Prüfung eines Laderaums eines Ladehilfsmittels in einem Lager- und Kommissioniersystem und Betriebsverfahren hierfür |
| AT520945A1 (de) | 2018-03-09 | 2019-09-15 | Tgw Logistics Group Gmbh | Kommissionierstation und Verfahren zum automatischen Kommissionieren von Waren |
| AT521112A1 (de) | 2018-03-09 | 2019-10-15 | Tgw Logistics Group Gmbh | Robotersystem zum Greifen einer Ware in einem Lager- und Kommissioniersystem und Betriebsverfahren hierfür |
| AT520958A1 (de) | 2018-03-09 | 2019-09-15 | Tgw Logistics Group Gmbh | Robotersystem mit an Warentypen angepassten Bewegungsabläufen und Betriebsverfahren hierfür |
| CN110221602B (zh) * | 2019-05-06 | 2022-04-26 | 上海秒针网络科技有限公司 | 目标对象捕捉方法和装置、存储介质及电子装置 |
| CN110142767B (zh) * | 2019-06-19 | 2022-04-12 | 斯瑞而(苏州)智能技术有限公司 | 一种集成视觉系统的夹爪控制方法、装置及夹爪控制设备 |
| US11171459B2 (en) * | 2019-08-09 | 2021-11-09 | The Boeing Company | Method and system for alignment of wire contact with wire contact insertion holes of a connector |
| US11374374B2 (en) | 2019-08-09 | 2022-06-28 | The Boeing Company | Method and system for alignment and insertion of wire contact with wire contact insertion holes of a connector |
| JP7424800B2 (ja) * | 2019-11-06 | 2024-01-30 | ファナック株式会社 | 制御装置、その制御方法、及び制御システム |
| US11670894B2 (en) | 2020-06-19 | 2023-06-06 | The Boeing Company | Method and system for error correction in automated wire contact insertion within a connector |
| US11151405B1 (en) | 2020-06-19 | 2021-10-19 | The Boeing Company | Method and system for machine vision detection |
| US12191619B2 (en) | 2022-04-22 | 2025-01-07 | The Boeing Company | Method, system, and computer program product for wire connector assembly |
| CN116009462B (zh) * | 2023-03-24 | 2023-07-07 | 四川弘仁财电科技有限公司 | 数据中心运维监控装置、系统及方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5348128B2 (ja) * | 2008-03-19 | 2013-11-20 | 株式会社安川電機 | 形状計測装置とこれを備えたロボット装置 |
| JP5229253B2 (ja) * | 2010-03-11 | 2013-07-03 | 株式会社安川電機 | ロボットシステム及びロボット装置並びにワーク取り出し方法 |
| FI20115326A0 (fi) | 2011-04-05 | 2011-04-05 | Zenrobotics Oy | Menetelmä sensorin mittausten mitätöimiseksi poimintatoiminnon jälkeen robottijärjestelmässä |
| JP2013078825A (ja) * | 2011-10-04 | 2013-05-02 | Yaskawa Electric Corp | ロボット装置、ロボットシステムおよび被加工物の製造方法 |
| DE102012013022A1 (de) * | 2012-06-29 | 2014-04-24 | Liebherr-Verzahntechnik Gmbh | Vorrichtung zur automatisierten Handhabung von Werkstücken |
| JP6273084B2 (ja) * | 2012-09-20 | 2018-01-31 | 株式会社安川電機 | ロボットシステムおよびワークの搬送方法 |
-
2015
- 2015-11-30 JP JP2015233659A patent/JP2017100214A/ja active Pending
-
2016
- 2016-11-29 US US15/363,667 patent/US20170151673A1/en not_active Abandoned
- 2016-11-29 CN CN201611102665.9A patent/CN106808485A/zh active Pending
- 2016-11-29 EP EP16201018.5A patent/EP3173194B1/en not_active Not-in-force
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019141943A (ja) * | 2018-02-19 | 2019-08-29 | ファナック株式会社 | ロボットの動作をシミュレーションするシミュレーション装置 |
| US11446822B2 (en) | 2018-02-19 | 2022-09-20 | Fanuc Corporation | Simulation device that simulates operation of robot |
| WO2020009148A1 (ja) * | 2018-07-03 | 2020-01-09 | コマツ産機株式会社 | ワーク搬送システムおよびワーク搬送方法 |
| US10576526B2 (en) | 2018-07-03 | 2020-03-03 | Komatsu Industries Corporation | Workpiece conveying system, and workpiece conveying method |
| JP2022507856A (ja) * | 2018-11-22 | 2022-01-18 | フンボルト ビー.ブイ. | 工業規模での動物の食肉処理中における、死骸および/またはカーカス部を位置決めするおよび/または処理する、方法および装置 |
| US11785956B2 (en) | 2018-11-22 | 2023-10-17 | Humboldt B.V. | Method and device for positioning and/or handling carcasses and/or carcass parts during the slaughter of animals on an industrial scale |
| JP2020201158A (ja) * | 2019-06-11 | 2020-12-17 | 株式会社島津製作所 | 立体物の外観検査装置および立体物の外観検査方法 |
| JP7484091B2 (ja) | 2019-06-11 | 2024-05-16 | 株式会社島津製作所 | 立体物の外観検査装置および立体物の外観検査方法 |
| JP2021096081A (ja) * | 2019-12-13 | 2021-06-24 | 倉敷紡績株式会社 | コネクタの3次元計測方法、コネクタの把持位置算出方法、コネクタの把持方法、コネクタの接続方法およびコネクタ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3173194B1 (en) | 2019-03-27 |
| CN106808485A (zh) | 2017-06-09 |
| EP3173194A1 (en) | 2017-05-31 |
| US20170151673A1 (en) | 2017-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017100214A (ja) | マニピュレータシステム、撮像システム、対象物の受け渡し方法、及び、マニピュレータ制御プログラム | |
| CN111452040B (zh) | 在引导装配环境中将机器视觉坐标空间关联的系统和方法 | |
| KR102821604B1 (ko) | 로봇 시스템을 동작하기 위한 방법, 로봇 시스템 및 컴퓨터로 실행 가능한 명령어를 저장한 비일시적 저장 매체 | |
| JP7398662B2 (ja) | ロボット多面グリッパアセンブリ及びその操作方法 | |
| US10239210B2 (en) | Vision-assisted system and method for picking of rubber bales in a bin | |
| JP2019509559A (ja) | センサ誘導式ロボットを用いたボックスの位置特定、分離、およびピッキング | |
| JP5582126B2 (ja) | ワーク取出システム、ロボット装置および被加工物の製造方法 | |
| JP2016055389A (ja) | 物品搬送システム | |
| JP6528123B2 (ja) | 部品取出し装置および部品取出し方法ならびに部品実装装置 | |
| JP5544320B2 (ja) | 立体視ロボットピッキング装置 | |
| JP2011143496A (ja) | トレイ移載装置及び方法 | |
| JP6528121B2 (ja) | 部品取出し装置および部品取出し方法ならびに部品実装装置 | |
| CN111672774A (zh) | 一种货品分拣系统及分拣方法 | |
| CN108745942A (zh) | 一种用于产品外观的检测方法及装置 | |
| JP2019016294A (ja) | 情報処理装置、情報処理方法、情報処理プログラム、及びシステム | |
| JP4122170B2 (ja) | 部品実装方法及び部品実装装置 | |
| CN113727817B (zh) | 控制器 | |
| JP6475165B2 (ja) | 実装装置 | |
| CN115003613B (zh) | 用于分离计件货物的设备和方法 | |
| JP4801558B2 (ja) | 実装機およびその部品撮像方法 | |
| JP6528122B2 (ja) | 部品取出し装置および部品取出し方法ならびに部品実装装置 | |
| JP4787694B2 (ja) | 実装機 | |
| JP2018127332A (ja) | 搬送システム | |
| JP7117507B2 (ja) | 部品装着方法および部品装着装置 | |
| JP6086671B2 (ja) | ダイ部品供給装置 |