JP2017100251A - ゴムホース把持装置及びゴムホース抜取方法 - Google Patents
ゴムホース把持装置及びゴムホース抜取方法 Download PDFInfo
- Publication number
- JP2017100251A JP2017100251A JP2015236176A JP2015236176A JP2017100251A JP 2017100251 A JP2017100251 A JP 2017100251A JP 2015236176 A JP2015236176 A JP 2015236176A JP 2015236176 A JP2015236176 A JP 2015236176A JP 2017100251 A JP2017100251 A JP 2017100251A
- Authority
- JP
- Japan
- Prior art keywords
- rubber hose
- pair
- mandrel
- gripping device
- rubber
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Manipulator (AREA)
Abstract
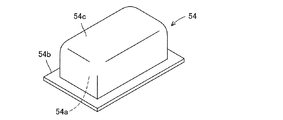
【解決手段】ゴムホース把持装置(32,33)は、一対の爪本体(52,52)と、可撓性を有し、一対の爪本体(52,52)のそれぞれに設けられ、一対の爪本体(52,52)の対向側の位置に設けられ、対向する爪本体(52)とは反対面である裏面に裏凹所(54a)を備える一対の変形部材54と、裏凹所(54a)に流体を供給する流体供給装置(56)とを備える。流体供給装置(56)が裏凹所(54a)に流体を供給することで、一対の変形部材(54,54)が変形してゴムホース(W)を把持する。
【選択図】図4
Description
(第一の課題)従来の一対の爪は、ゴムホースの外面に対応する凹形状に形成されているため、一対の爪の凹形状の面とゴムホースの外面との相対位置を正確に位置決めしなければ、ゴムホースの抜取ミスが発生するおそれがある。
本発明に係るゴムホース把持装置は、一対の爪本体と、可撓性を有し、前記一対の爪本体のそれぞれに設けられ、前記一対の爪本体の対向側の位置に設けられ、対向する爪本体とは反対面である裏面に裏凹所を備える一対の変形部材と、前記裏凹所に流体を供給する流体供給装置と、を備える。前記流体供給装置が前記裏凹所に流体を供給することで、前記一対の変形部材が変形してゴムホースを把持する。
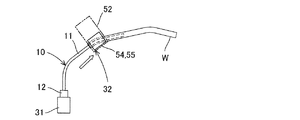
本発明のゴムホース抜取方法は、上記ゴムホース把持装置を用い、前記マンドレルから前記ゴムホースを抜き取る方法であって、前記一対の変形部材は、前記ゴムホースにおける前記マンドレルの中心線方向の中央部より基端側の位置を把持し、前記駆動装置の駆動により前記マンドレルに沿って移動し、前記マンドレルから前記ゴムホースを抜き取る。
曲がりゴムホースWの製造設備について、図1を参照して説明する。当該製造設備は、直管状の未加硫ゴムホースから加硫後の曲がり形状のゴムホースWを成形し、形状検査及びマーキングを施す。
形状検査マーキング装置5は、加硫後のゴムホースWの形状を検査すると共に、検査にて良品と判定されたゴムホースWに対してマークを付す。
マンドレルユニット10について、図2を参照して説明する。マンドレルユニット10は、ゴムホースWが挿入される複数のマンドレル11と、複数のマンドレル11の一端(基端)を連結する連結部材12とを備える。本実施形態においては、マンドレルユニット10は、12本のマンドレル11を備える。
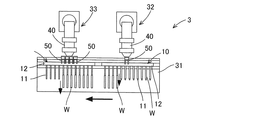
ゴムホース抜取装置3の構成について、図3を参照して説明する。図3に示すように、ゴムホース抜取装置3は、マンドレルユニット10を支持すると共に搬送する搬送路31(本発明にける支持部材に相当)と、搬送されるマンドレル11からキャップ13を取り外すキャップ取外ロボット(図示せず)と、ゴムホースWの一部をマンドレル11から抜き取る第一把持装置32(本発明のゴムホース把持装置に相当)と、ゴムホースWをマンドレル11から完全に抜き取る第二把持装置33(本発明のゴムホース把持装置に相当)とを備える。
第一把持装置32及び第二把持装置33の先端ユニット50の構成について、図4及び図5を参照して説明する。先端ユニット50は、基部51と、一対の爪本体52,52と、一対の直動装置53,53と、一対の変形部材54,54と、一対の被覆部材55,55と、流体供給装置56とを備える。
次に、第一把持装置32及び第二把持装置33により、ゴムホースWをマンドレル11から抜き取る方法について、図6A、図6B、図7A及び図7Bを参照して説明する。
上述したように、本実施形態の第一把持装置32及び第二把持装置33は、一対の爪本体52,52と、可撓性を有し、一対の爪本体52,52のそれぞれに設けられ、一対の爪本体52,52の対向側の位置に設けられ、対向する爪本体52とは反対面である裏面に裏凹所54aを備える一対の変形部材54と、裏凹所54aに流体を供給する流体供給装置56とを備える。そして、流体供給装置56が裏凹所54aに流体を供給することで、一対の変形部材54,54が変形してゴムホースWを把持する。
Claims (7)
- 一対の爪本体と、
可撓性を有し、前記一対の爪本体のそれぞれに設けられ、前記一対の爪本体の対向側の位置に設けられ、対向する爪本体とは反対面である裏面に裏凹所を備える一対の変形部材と、
前記裏凹所に流体を供給する流体供給装置と、
を備え、
前記流体供給装置が前記裏凹所に流体を供給することで、前記一対の変形部材が変形してゴムホースを把持する、ゴムホース把持装置。 - 前記ゴムホース把持装置は、前記ゴムホースが挿通された状態の曲がり形状のマンドレルが支持部材に支持された状態において、前記一対の爪本体を前記支持部材に対して相対移動する駆動装置を備え、
前記支持部材により前記マンドレルが支持された状態であり、且つ、前記流体供給装置が前記裏凹所に流体を供給することで前記一対の変形部材が前記ゴムホースを把持した状態において、前記駆動装置の駆動により、曲がり形状に形成された前記ゴムホースを前記マンドレルから抜き取る、請求項1に記載のゴムホース把持装置。 - 前記一対の変形部材は、ゴム状弾性を有するエラストマーにより形成される、請求項2に記載のゴムホース把持装置。
- 前記ゴムホース把持装置は、前記一対の変形部材の表面に設けられ、前記ゴムホースの外面に密着する被覆部材を備える、請求項3に記載のゴムホース把持装置。
- 前記一対の変形部材が変形していない状態において、前記一対の変形部材の表面のうち、前記ゴムホースの被把持部位に対向する部位は、平面状に形成される、請求項3又は4に記載のゴムホース把持装置。
- 請求項1−5の何れか一項に記載のゴムホース把持装置を用い、前記マンドレルから前記ゴムホースを抜き取る方法であって、
前記一対の変形部材は、
前記ゴムホースにおける前記マンドレルの軸方向中央より基端側の位置を把持し、
前記駆動装置の駆動により前記マンドレルに沿って移動し、前記マンドレルから前記ゴムホースを抜き取る、ゴムホース抜取方法。 - 前記マンドレルは、曲がり形状のマンドレルであり、
前記一対の変形部材は、
最初に前記マンドレルにおいて前記曲がり部より基端側を把持し、
前記駆動装置の駆動により前記マンドレルの前記曲がり部に沿って移動し、前記マンドレルから前記ゴムホースを抜き取る、請求項6に記載のゴムホース抜取方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236176A JP6650740B2 (ja) | 2015-12-03 | 2015-12-03 | ゴムホース把持装置及びゴムホース抜取方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236176A JP6650740B2 (ja) | 2015-12-03 | 2015-12-03 | ゴムホース把持装置及びゴムホース抜取方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017100251A true JP2017100251A (ja) | 2017-06-08 |
| JP6650740B2 JP6650740B2 (ja) | 2020-02-19 |
Family
ID=59015799
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015236176A Active JP6650740B2 (ja) | 2015-12-03 | 2015-12-03 | ゴムホース把持装置及びゴムホース抜取方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6650740B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020075305A (ja) * | 2018-11-05 | 2020-05-21 | 株式会社 タナック | 把持装置 |
| CN112223331A (zh) * | 2020-12-14 | 2021-01-15 | 烟台工程职业技术学院(烟台市技师学院) | 一种用于机械加工的机械手 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57144689A (en) * | 1981-02-27 | 1982-09-07 | Michio Yoshikawa | Gripping behavior sensor of gripping mechanism |
| US4403801A (en) * | 1981-02-24 | 1983-09-13 | Caterpillar Tractor Co. | Clamp assembly |
| JPS618293A (ja) * | 1984-06-21 | 1986-01-14 | 株式会社東芝 | ワ−ク把持装置 |
| JPH01301086A (ja) * | 1988-05-26 | 1989-12-05 | Bridgestone Corp | 部品等のつかみ装置 |
| US5424015A (en) * | 1992-09-29 | 1995-06-13 | Yamashita Rubber Kabushiki Kaisha | Method and device for manufacturing rubber bend pipe |
| JPH09174708A (ja) * | 1995-12-27 | 1997-07-08 | Tokai Rubber Ind Ltd | 曲管ゴムホースの製造方法及び該方法に使用するマンドレル |
| JPH11277546A (ja) * | 1998-03-31 | 1999-10-12 | Marugo Rubber Ind Co Ltd | ゴムホースの把持装置 |
| JP2014159069A (ja) * | 2013-02-20 | 2014-09-04 | Toyota Motor Corp | 把持装置の当接部材 |
-
2015
- 2015-12-03 JP JP2015236176A patent/JP6650740B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4403801A (en) * | 1981-02-24 | 1983-09-13 | Caterpillar Tractor Co. | Clamp assembly |
| JPS57144689A (en) * | 1981-02-27 | 1982-09-07 | Michio Yoshikawa | Gripping behavior sensor of gripping mechanism |
| JPS618293A (ja) * | 1984-06-21 | 1986-01-14 | 株式会社東芝 | ワ−ク把持装置 |
| JPH01301086A (ja) * | 1988-05-26 | 1989-12-05 | Bridgestone Corp | 部品等のつかみ装置 |
| US5424015A (en) * | 1992-09-29 | 1995-06-13 | Yamashita Rubber Kabushiki Kaisha | Method and device for manufacturing rubber bend pipe |
| JPH09174708A (ja) * | 1995-12-27 | 1997-07-08 | Tokai Rubber Ind Ltd | 曲管ゴムホースの製造方法及び該方法に使用するマンドレル |
| JPH11277546A (ja) * | 1998-03-31 | 1999-10-12 | Marugo Rubber Ind Co Ltd | ゴムホースの把持装置 |
| JP2014159069A (ja) * | 2013-02-20 | 2014-09-04 | Toyota Motor Corp | 把持装置の当接部材 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020075305A (ja) * | 2018-11-05 | 2020-05-21 | 株式会社 タナック | 把持装置 |
| CN112223331A (zh) * | 2020-12-14 | 2021-01-15 | 烟台工程职业技术学院(烟台市技师学院) | 一种用于机械加工的机械手 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6650740B2 (ja) | 2020-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4249789B2 (ja) | 可撓性ワーク組付方法 | |
| CN106604805B (zh) | 末端执行器、产业用机器人、及其运转方法 | |
| WO2019170129A1 (zh) | 一种内撑式夹具 | |
| JP2021502530A (ja) | 低減された細菌貯留点、シール能力、および構成要素保護特徴を伴う締結具 | |
| US20130154294A1 (en) | Robot and robot hand | |
| US20190184693A1 (en) | Method and Apparatus for Forming Composite Plies on Contoured Tool Surfaces | |
| US10358943B2 (en) | Apparatus for manufacturing a flanged composite component and methods of manufacturing the same | |
| US10875194B1 (en) | Adaptable suction cup assembly | |
| US10843348B1 (en) | Actuator and gripper assembly | |
| JP2019010723A (ja) | ロボットハンド、ロボット装置、ロボットハンドの制御方法 | |
| JP2017100251A (ja) | ゴムホース把持装置及びゴムホース抜取方法 | |
| CN106457576A (zh) | 末端执行器、工业用机器人及其运转方法 | |
| KR20140113051A (ko) | 호스와 파이프의 삽입장치 | |
| JP2017213702A (ja) | 帯状部材の接合方法および装置 | |
| US20150251239A1 (en) | Blind rivet setting device | |
| JP6597399B2 (ja) | 筒体被覆部材の製造装置、筒体被覆部材の製造方法 | |
| KR101569611B1 (ko) | 밀착수단 및 이를 이용한 하이드로포밍용 튜브 클램핑 유닛 | |
| EP2348241B1 (en) | Tube applicator | |
| KR20170125608A (ko) | 그리퍼 장치 및 제어 방법 | |
| JP5560106B2 (ja) | つかみ装置 | |
| KR101354156B1 (ko) | 퀵 커넥터 | |
| JP2020028407A (ja) | 樹脂製チューブ把持装置 | |
| JP2014083640A (ja) | つかみ装置およびつかみユニット | |
| US20170225525A1 (en) | Apparatus and method for installation and removal of an electronic component for a tire | |
| JP2010082723A (ja) | ハンド機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190903 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200121 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6650740 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |