JP2017104451A - 外科手術システム - Google Patents
外科手術システム Download PDFInfo
- Publication number
- JP2017104451A JP2017104451A JP2015242696A JP2015242696A JP2017104451A JP 2017104451 A JP2017104451 A JP 2017104451A JP 2015242696 A JP2015242696 A JP 2015242696A JP 2015242696 A JP2015242696 A JP 2015242696A JP 2017104451 A JP2017104451 A JP 2017104451A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- end portion
- distal end
- axis
- side link
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/72—Micromanipulators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/20—Holders specially adapted for surgical or diagnostic appliances or instruments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
- B25J19/0029—Means for supplying energy to the end effector arranged within the different robot elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/06—Program-controlled manipulators characterised by multi-articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00199—Electrical control of surgical instruments with a console, e.g. a control panel with a display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00225—Systems for controlling multiple different instruments, e.g. microsurgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
- A61B2017/00482—Coupling with a code
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00831—Material properties
- A61B2017/00862—Material properties elastic or resilient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/98—Identification means for patients or instruments, e.g. tags using electromagnetic means, e.g. transponders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
Abstract
Description
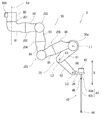
図1は、本発明の一実施形態に係る外科手術システム100の全体的な構成を示す概略図である。図1に示すように、外科手術システム100は、ロボット支援手術やロボット遠隔手術などのように、医師などの術者Oが患者側システム1を用いて患者Pに内視鏡外科手術を施すシステムである。
操作装置2は、外科手術システム100と術者Oのインターフェースを構成し、患者側システム1を操作するための装置である。操作装置2は、手術室内において手術台111の傍らに又は手術台111から離れて、或いは、手術室外に設置されている。操作装置2は、術者Oが動作指令を入力するための操作用マニピュレータアーム51や操作ペダル52などの操作入力部50と、内視鏡アセンブリ41で撮影された画像を表示するモニタ53とを含む。術者Oは、モニタ53で患部を視認しながら、操作入力部50を操作して操作装置2に動作指令を入力する。操作装置2に入力された動作指令は、有線又は無線により患者側システム1の後述するコントローラ6に伝達される。
患者側システム1は、外科手術システム100と患者Pとのインターフェースを構成する。患者側システム1は、手術室内において患者Pが横たわる手術台111の傍らに配置されている。手術室内は滅菌された滅菌野である。
ここで、ポジショナ7の構成について詳細に説明する。図2は、ポジショナ7の全体的な構成を示す側面図である。
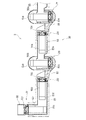
ここで、アーム3の構成について詳細に説明する。図7では、患者側システム1が備える複数のアーム3のうちの1本の概略構成が示されている。図7に示すように、アーム3は、アーム本体30と、アーム本体30の先端部に連結された並進アーム35とを備え、基端部に対し先端部を3次元空間内で移動させることができるように構成されている。なお、本実施形態では、患者側システム1が具備する複数のアーム3はいずれも同様又は類似の構成を有するが、複数のアーム3のうち少なくとも1本が余と異なる構成を有してもよい。
アーム本体30は、プラットホーム5に着脱可能に取り付けられるベース80と、ベース80から先端部に向けて順次連結された第1リンク81〜第6リンク86とを含む。より詳細には、ベース80の先端部に、捩り関節J31を介して第1リンク81の基端部が連結されている。第1リンク81の先端部に、捩り関節J32を介して第2リンク82の基端部が連結されている。第2リンク82の先端部に、曲げ関節J33を介して第3リンク83の基端部が連結されている。第3リンク83の先端部に、捩り関節J34を介して第4リンク84の基端部が連結されている。第4リンク84の先端部に、曲げ関節J35を介して第5リンク85の基端部が連結されている。第5リンク85の先端部に、捩り関節J36を介して第6リンク86の基端部が連結されている。第6リンク86の先端部に、並進アーム35の基端部が連結されている。
ここで、プラットホーム5とアーム3との連結構造について説明する。
図7に示すように、並進アーム35は、並進アーム35の先端部に取り付けられたホルダ36を基準方向Dに並進移動させることにより、ホルダ36に取り付けられたインストゥルメント42をシャフト43の延在方向に並進移動させる機構である。
図18は、並進アームの変形例1を示す図である。上記実施の形態において、並進アーム35は、アーム本体30の先端部30aから基準方向Dにおいてホルダ36に保持されたインストゥルメント42のシャフト43の基端部から先端部に向かう側に位置するように配設されているがこれに限られるものではない。これに代えて、並進アーム335は、並進アーム35は、アーム本体30の先端部30aから基準方向Dにおいてホルダ36に保持されたインストゥルメント42のシャフト43の先端部から基端部に向かう側に位置するように配設されていてもよい。
図19は、並進アームの変形例2を示す図である。上記実施の形態において、並進アーム35は、基端側リンク61の先端部に先端側リンク62の基端部が取り付けられている構成を例示したがこれに限られるものではない。これに代えて、以下の通り構成されていてもよい。
図7に示すように、アーム3は、揺動機構46を備えている。揺動機構46は、アーム3とエンドエフェクタ44との間に介在し、基準方向Dを中心とする径方向にシャフト43の先端部、及びエンドエフェクタ44を揺動させる機構である。
図20は、揺動機構の変形例1を示す図である。揺動機構は、ボール継手を用いた機構であってもよい。
図21は、揺動機構の変形例2を示す図である。揺動機構は、弾性を有する部材を用いた機構であってもよい。
図22は、揺動機構を備えるアームの変形例を示す図である。上記実施の形態において、揺動機構46がシャフト43の中間部に設けられている構成例を例示したがこれに限られるものではない。これに代えて、揺動機構46は、並進アーム35の先端部とインストゥルメント42との間に介在するように設けられていてもよい。
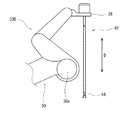
図23は、揺動機構を備えるアームの変形例を示す図である。上記実施の形態1において、揺動機構46は、並進アーム35を有するアーム3を備える外科手術システム100に適用したがこれに限られるものではない。これに代えて、揺動機構46は、直動関節235を有するアームに適用してもよい。
以上に説明したように、本発明の外科手術システム100の並進アーム35は、基端側リンク61が退避角度位置P1に位置すると共に、先端側リンク62が縮閉角度位置P3に位置する折畳状態と、基端側リンク61が進出角度位置P2に位置すると共に、先端側リンク62が拡開角度位置P4に位置する伸長状態との間で遷移することによって、インツトゥルメント42を基準方向Dに移動させることができる。したがって、直動関節によってホルダ36を基準方向Dに移動させる構成と比較して、基準方向Dにおけるアーム3の寸法をコンパクトに構成することができる。
L1 第1軸線
L2 第2軸線
L3 第3軸線
Lp 旋回軸線
O 術者
P 患者
P1 退避角度位置
P2 進出角度位置
P3 縮閉角度位置
P4 拡開角度位置
1 患者側システム
3 アーム
30 アーム本体
30a 先端部
35 並進アーム
36 ホルダ
37 第1並進アーム駆動軸
38 第2並進アーム駆動軸
42 インストゥルメント
43 シャフト
43a 基端側部材
43b 先端側部材
44 エンドエフェクタ
47 並進アーム駆動部
47a 出力軸
48 並進アーム回転駆動部
48a 出力軸
61 基端側リンク
61a シールベアリング
61b シールベアリング
62 先端側リンク
62a シールベアリング
63 連結軸
64 連動機構
65a 第1プーリ
65b 第2プーリ
65c 第3プーリ
65d 第4プーリ
67a 第1ベルト
67b 第2ベルト
68 回動軸
100 外科手術システム
Claims (8)
- 基端部に対して先端部を3次元空間内で移動するアーム本体と、
基端部が前記アーム本体の先端部に連なり、所定の基準方向と直交する第1軸線周りに回動し、退避角度位置と該退避角度位置よりも前記基準方向において前記第1軸線から離れる側に先端部が位置する進出角度位置とを含む角度範囲で回動するよう構成された基端側リンクと、基端部が前記基端側リンクの先端部に連なり、前記第1軸線と平行な第2軸線周りに回動し、縮閉角度位置と該縮閉角度位置よりも前記基端側リンクと成す角の角度が大きい拡開角度位置とを含む角度範囲で回動するよう構成された先端側リンクと、を有する並進アームと、
その駆動力により前記基端側リンク及び前記先端側リンクを回動させる並進アーム駆動部と、
前記並進アームの先端部に連なり、長軸状のシャフトと該シャフトの先端部に設けられた処置具とを有する外科用器具を前記シャフトが前記基準方向に延在する姿勢で保持可能な器具保持部と、を備える、外科手術システム。 - 前記並進アームは、前記基端側リンクの前記退避角度位置から前記進出角度位置に向かう回動動作に連動して前記先端側リンクを前記縮閉角度位置から前記拡開角度位置に向かって回動させ、且つ前記基端側リンクの前記進出角度位置から前記退避角度位置に向かう回動動作に連動して前記先端側リンクを前記拡開角度位置から前記縮閉角度位置に向かって回動させる連動機構を更に備え、
前記基端側リンクは、前記並進アーム駆動部の出力軸の回転により回転するように前記出力軸に連結されている、請求項1に記載の外科手術システム。 - 前記連動機構は、前記基端側リンクの基端部に対して前記先端側リンクの先端部を前記基準方向に直進動作させるように前記先端側リンクを前記基端側リンクに連動させる、請求項2に記載の外科手術システム。
- 前記連動機構は、前記アーム本体に対する前記器具保持部の姿勢を維持しながら前記器具保持部を前記基準方向に直進動作させる、請求項3に記載の外科手術システム。
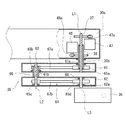
- 基端部が前記アーム本体に前記第1軸線周りに回動可能に取り付けられ、且つ先端部が前記基端側リンクに固定され、且つ前記並進アーム駆動部の前記出力軸の回転により回動するように前記並進アーム駆動部の前記出力軸に連結されている第1並進アーム駆動軸と、
内部に前記第1並進アーム駆動軸が入れ子状に配置され、基端部が前記アーム本体に前記第1軸線周りに回動可能に取り付けられ、先端部が前記第1軸線周りに回動可能に前記基端側リンクの基端部に取り付けられている第2並進アーム駆動軸と、
基端部が前記基端側リンクの先端部に固定され、先端部が前記第2軸線周りに回動可能に前記先端側リンクの基端部に取り付けられている第1連結軸と、
内部に前記第1連結軸が入れ子状に配置され、基端部が前記第2軸線周りに回動可能に前記基端側リンクの先端部に取り付けられ、先端部が前記先端側リンクの基端部に取り付けられている第2連結軸と、を更に備え、
前記連動機構は、前記第2並進アーム駆動軸の先端部に固定された第1プーリと、前記第2連結軸の基端部に固定された第2プーリと、前記第1プーリ及び前記第2プーリに掛け渡された第1ベルトと、を有する、請求項2乃至4の何れかに記載の外科手術システム。 - 基端部が前記第1軸線及び前記第2軸線と平行に延在する第3軸線周りに回動可能に前記先端側リンクの先端部に取り付けられている回動軸を更に備え、
前記器具保持部は、前記回動軸の先端部に取り付けられ、
前記連動機構は、前記第1連結軸の先端部に固定された第3プーリと、前記回動軸の基端部に固定された第4プーリと、前記第3プーリと前記第4プーリに掛け渡された第2ベルトと、を有する請求項5に記載の外科手術システム。 - 前記第1軸線及び前記第2軸線の距離は前記第2軸線と前記第3軸線の距離と同じであり、且つ前記第1プーリの直径と前記第2プーリの直径との比率であるプーリ比は、2:1である、請求項6に記載の外科手術システム。
- 前記第3プーリの直径と前記第4プーリの直径との比率であるプーリ比は、1:2である、請求項7に記載の外科手術システム。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242696A JP2017104451A (ja) | 2015-12-11 | 2015-12-11 | 外科手術システム |
| EP16873093.5A EP3388016A4 (en) | 2015-12-11 | 2016-12-08 | SURGICAL SYSTEM |
| KR1020187018931A KR20180090331A (ko) | 2015-12-11 | 2016-12-08 | 외과수술 시스템 |
| PCT/JP2016/086641 WO2017099200A1 (ja) | 2015-12-11 | 2016-12-08 | 外科手術システム |
| CN201680072341.7A CN108289717A (zh) | 2015-12-11 | 2016-12-08 | 外科手术系统 |
| US16/060,987 US20180360554A1 (en) | 2015-12-11 | 2016-12-08 | Surgical system |
| TW105140835A TWI620548B (zh) | 2015-12-11 | 2016-12-09 | Surgical system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242696A JP2017104451A (ja) | 2015-12-11 | 2015-12-11 | 外科手術システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017104451A true JP2017104451A (ja) | 2017-06-15 |
Family
ID=59013233
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015242696A Pending JP2017104451A (ja) | 2015-12-11 | 2015-12-11 | 外科手術システム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20180360554A1 (ja) |
| EP (1) | EP3388016A4 (ja) |
| JP (1) | JP2017104451A (ja) |
| KR (1) | KR20180090331A (ja) |
| CN (1) | CN108289717A (ja) |
| TW (1) | TWI620548B (ja) |
| WO (1) | WO2017099200A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111685881A (zh) * | 2020-06-19 | 2020-09-22 | 山东大学 | 一种可自由安装的微型化床旁手术机器人及其工作方法 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITUB20154977A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Strumento medicale e metodo di fabbricazione di detto strumento medicale |
| WO2019143458A1 (en) * | 2018-01-17 | 2019-07-25 | Auris Health, Inc. | Surgical robotics systems with improved robotic arms |
| CN109223182B (zh) * | 2018-11-21 | 2021-06-11 | 天津工业大学 | 一种用于微创手术机器人远程中心运动的钢带传动机构 |
| JP6870010B2 (ja) * | 2019-01-21 | 2021-05-12 | 株式会社メディカロイド | 手術システムおよび支持装置 |
| JP7224989B2 (ja) * | 2019-03-22 | 2023-02-20 | 川崎重工業株式会社 | 医療用マニピュレータ |
| JP2021091047A (ja) * | 2019-12-11 | 2021-06-17 | セイコーエプソン株式会社 | 識別番号設定システム、識別番号設定方法およびロボットシステム |
| CN114052914B (zh) * | 2020-07-31 | 2025-06-13 | 杭州三坛医疗科技有限公司 | 一种手术机器人 |
| CN111998214A (zh) * | 2020-09-03 | 2020-11-27 | 广东亿嘉和科技有限公司 | 一种机器人云台升降设备 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008272864A (ja) * | 2007-04-27 | 2008-11-13 | Nidec Sankyo Corp | 産業用ロボット及び集合処理装置 |
| JP2012115690A (ja) * | 2004-09-30 | 2012-06-21 | Intuitive Surgical Inc | オフセット遠隔中心マニピュレーター |
| WO2015142943A1 (en) * | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | System and method for maintaining a tool pose |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4450664B2 (ja) * | 2003-06-02 | 2010-04-14 | 東京エレクトロン株式会社 | 基板処理装置及び基板搬送方法 |
| KR20120115486A (ko) * | 2009-11-13 | 2012-10-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 곡선형 캐뉼라 수술 시스템 |
| CN104349741B (zh) * | 2012-06-01 | 2017-03-22 | 直观外科手术操作公司 | 手术器械操纵器方面 |
| JP2013255966A (ja) * | 2012-06-13 | 2013-12-26 | Olympus Corp | 自重補償付き直動機構、操作入力装置、及び手術支援システム |
| US10076348B2 (en) * | 2013-08-15 | 2018-09-18 | Intuitive Surgical Operations, Inc. | Rotary input for lever actuation |
-
2015
- 2015-12-11 JP JP2015242696A patent/JP2017104451A/ja active Pending
-
2016
- 2016-12-08 KR KR1020187018931A patent/KR20180090331A/ko not_active Ceased
- 2016-12-08 US US16/060,987 patent/US20180360554A1/en not_active Abandoned
- 2016-12-08 CN CN201680072341.7A patent/CN108289717A/zh active Pending
- 2016-12-08 EP EP16873093.5A patent/EP3388016A4/en not_active Withdrawn
- 2016-12-08 WO PCT/JP2016/086641 patent/WO2017099200A1/ja not_active Ceased
- 2016-12-09 TW TW105140835A patent/TWI620548B/zh not_active IP Right Cessation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012115690A (ja) * | 2004-09-30 | 2012-06-21 | Intuitive Surgical Inc | オフセット遠隔中心マニピュレーター |
| JP2008272864A (ja) * | 2007-04-27 | 2008-11-13 | Nidec Sankyo Corp | 産業用ロボット及び集合処理装置 |
| WO2015142943A1 (en) * | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | System and method for maintaining a tool pose |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111685881A (zh) * | 2020-06-19 | 2020-09-22 | 山东大学 | 一种可自由安装的微型化床旁手术机器人及其工作方法 |
| CN111685881B (zh) * | 2020-06-19 | 2022-04-01 | 山东大学 | 一种可自由安装的微型化床旁手术机器人及其工作方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3388016A1 (en) | 2018-10-17 |
| KR20180090331A (ko) | 2018-08-10 |
| EP3388016A4 (en) | 2019-07-31 |
| CN108289717A (zh) | 2018-07-17 |
| US20180360554A1 (en) | 2018-12-20 |
| TW201726074A (zh) | 2017-08-01 |
| TWI620548B (zh) | 2018-04-11 |
| WO2017099200A1 (ja) | 2017-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6654883B2 (ja) | 外科手術システム、マニピュレータアーム、及びマニピュレータアーム支持体 | |
| WO2017099200A1 (ja) | 外科手術システム | |
| JP6654884B2 (ja) | 外科手術システム | |
| KR102322620B1 (ko) | 하드웨어 제한형 원격 중심 로봇 매니퓰레이터용 여유 축 및 자유도 | |
| US12324639B2 (en) | Surgical system and method of controlling surgical manipulator arm | |
| JP2017104456A (ja) | 医療用ロボットシステム、データ解析装置、および、医療用ロボットの監視方法 | |
| JP2017189495A (ja) | 外科手術システム | |
| JP2020151354A (ja) | 医療用マニピュレータ | |
| WO2017099242A1 (ja) | 外科手術システム | |
| US11648067B2 (en) | Medical manipulator and surgical system including the same | |
| US11717366B2 (en) | Medical manipulator | |
| JP6894954B2 (ja) | 医療用マニピュレータおよびこれを備えた外科手術システム | |
| JP6567771B2 (ja) | マニピュレータシステム | |
| CN221512160U (zh) | 一种手术机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200526 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200720 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201208 |