JP2017104455A - 遠隔操作装置及び遠隔手術システム - Google Patents
遠隔操作装置及び遠隔手術システム Download PDFInfo
- Publication number
- JP2017104455A JP2017104455A JP2015242726A JP2015242726A JP2017104455A JP 2017104455 A JP2017104455 A JP 2017104455A JP 2015242726 A JP2015242726 A JP 2015242726A JP 2015242726 A JP2015242726 A JP 2015242726A JP 2017104455 A JP2017104455 A JP 2017104455A
- Authority
- JP
- Japan
- Prior art keywords
- remote control
- control device
- operation handle
- handle
- remote
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/042—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by a proximal camera, e.g. a CCD camera
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
- A61B2034/258—User interfaces for surgical systems providing specific settings for specific users
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/742—Joysticks
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Robotics (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Pathology (AREA)
- Optics & Photonics (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Abstract
Description
手術室において、手術の傷口及び医療機器が病原菌及び異物により汚染されることを防ぐため、清潔操作が行われる。この清潔操作においては、清潔区域及び清潔区域以外の区域である汚染区域が設定される。そして、塵や埃等の異物が落ちている可能性が高い床面から一定の高さまでの区域は、原則、汚染区域として扱い、清潔領域から除外される。この区域は、通常、床面から70cmの高さまでの区域である。
本発明は、このような清潔操作に関する知見に関連するものである。
図1は、本発明の実施の形態に係る遠隔手術システム100の構成例を示す斜視図である。
図1に示すように、遠隔手術システム100は、低侵襲手術を実施するシステムである。遠隔手術システム100は、患者側手術装置1と遠隔操作装置2とを含む。患者側手術装置1によって実行されるべき動作態様指令が外科医等の術者Oにより遠隔操作装置2に入力されると、遠隔操作装置2は動作態様指令を患者側手術装置1に送信する。そして、患者側手術装置1は、遠隔操作装置2から送信された動作態様指令に応答して、術具等を取り扱う。このように、遠隔手術システム100は、遠隔操作装置2からインストゥルメントアーム3等を遠隔的に操作することによって、低侵襲手術を実施するシステムである。
患者側手術装置1は、遠隔手術システム100と患者Pとのインターフェースを構成する。患者側手術装置1は、患者が横たわる手術台111の傍らに配置される。
遠隔操作装置2は、遠隔手術システム100と術者Oとのインターフェースを構成し、インストゥルメントアーム3、インストゥルメント12、カメラアーム4、内視鏡カメラプローブ13(図4参照)を術者Oが操作するための装置である。すなわち、遠隔操作装置2は、術者Oによって入力されたインストゥルメントアーム3、インストゥルメント12、カメラアーム4、及び内視鏡カメラプローブ13によって実行されるべき動作態様指令を患者側手術装置1に対して送信することができるように構成されている。また、遠隔操作装置2は、内視鏡カメラプローブ13によって撮影された画像を表示することができるように構成されている。遠隔操作装置2は、例えば、手術台111の傍らに設置されるが、別室などに設置することも可能である。
図4に示すように、制御器6は、例えば、CPU等の演算器を有する制御部66と、ROM及びRAM等のメモリを有する記憶部67とを備えている。制御器6は、集中制御する単独の制御器で構成されていてもよく、互いに協働して分散制御する複数の制御器で構成されてもよい。
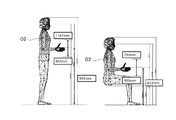
図6Aは、立位適応形態をとる遠隔操作装置の構成例を示す側面図である。
図6Bは、座位適応形態をとる遠隔操作装置の構成例を示す側面図である。
遠隔操作装置2の寸法等を具体的に設計するために、「1988 ANTHROPOMETRIC SURVEY OF U.S. ARMY PERSONNEL:METHODS AND SUMMARY STATISTICS(1988)」に記載されている測定データを用いた。
次に、遠隔操作装置2の動作例を説明する。
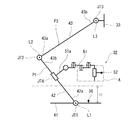
図11は、実施の形態2に係る遠隔手術システム200の遠隔操作装置202を示す側面図である。
なお、本実施形態において、支持機構231は、支持脚41、スライド機構201、下側支持部42、及び上側支持部43により構成される例を示したが、下側支持部42と上側支持部43は一体として支持部とし、第2関節JT2を無くしても構わない。さらに、表示部の角度を調節するための第3関節JT3を無くすことも可能である。これらの場合、立位姿勢と座位姿勢の適応形態を、一体化した支持部の上下移動によってのみ変更することとなる。
図13Aは、実施の形態3に係る遠隔手術システム300を示す斜視図であり、遠隔操作装置2が座位適応形態をとる状態を示す図である。図13Bは、実施の形態3に係る遠隔手術システム300を示す斜視図であり、遠隔操作装置2が立位適応形態をとる状態を示す図である。
JT1 第1関節
JT2 第2関節
JT3 第3関節
O 術者
P 患者
P1 起立角度位置
P2 倒伏角度位置
P3 拡開角度位置
P4 縮閉角度位置
1 患者側手術装置
2 遠隔操作装置
3 手術マニピュレータ
4 サーボマニピュレータ
5 セットアップジョイントアーム
6 制御器
7 基台
11 可動部
12 術具
13 内視鏡カメラプローブ
31 支持機構
32 遠隔操作部
33 表示部
33a 左眼用表示部
33b 右眼用表示部
34 操作対象切替操作部
35 姿勢操作部
36 操作べダル
41 支持脚
42 下側支持部
42a 基端部
42b 先端部
43 上側支持部
43a 基端部
44 関節駆動部
45 第1関節駆動部
46 第2関節駆動部
47 第3関節駆動部
51 操作アーム
51a 基端部
52 ハンドル
61 立位適応形態遷移ボタン
62 座位適応形態遷移ボタン
63 高さ位置調節ボタン
64 前後位置調節ボタン
66 制御部
67 記憶部
100 遠隔手術システム
111 手術台
Claims (19)
- 手術マニピュレータによって実行されるべき動作態様指令を手術マニピュレータに対して送信する遠隔操作装置であって、
所定の操作領域内で動かすことができるように構成され、前記手術マニピュレータによって実行されるべき動作態様指令を入力するための操作ハンドルと、該操作ハンドルを支持する支持機構とを備え、
前記支持機構は、前記遠隔操作装置が設置される床面から85cm以上の第1高さ位置に前記操作領域の中立位置に位置する前記操作ハンドルを位置させて該操作ハンドルを保持する第1形態と、前記第1高さ位置から前記操作ハンドルを移動させて48cm以上下方の第2高さ位置に前記操作領域の中立位置に位置する前記操作ハンドルを位置させて該操作ハンドルを保持する第2形態との間で遷移可能に構成されている、遠隔操作装置。 - 前記遠隔操作装置が前記第1形態をとる状態において、前記支持機構は、前記遠隔操作装置が設置される床面から99cm以上の第1高さ位置に前記操作領域の中立位置に位置する前記操作ハンドルを位置させることができるように前記操作ハンドルを保持する、請求項1に記載の遠隔操作装置。
- 前記遠隔操作装置が前記第2形態をとる状態において、前記支持機構は、前記第1高さ位置から前記操作ハンドルを移動させて50cm以上下方の第2高さ位置に前記操作領域の中立位置に位置する前記操作ハンドルを位置させて該操作ハンドルを保持する、請求項1又は2に記載の遠隔操作装置。
- 手術マニピュレータによって実行されるべき動作態様指令を手術マニピュレータに対して送信する遠隔操作装置であって、
所定の操作領域内で動かすことができるように構成され、前記手術マニピュレータによって実行されるべき動作態様指令を入力するための操作ハンドルと、該操作ハンドルを支持する支持機構とを備え、
前記支持機構は、前記遠隔操作装置が設置される床面から所定の高さ以上に設定された清潔区域に前記操作ハンドルの前記操作領域が収まるように前記操作ハンドルを保持する第1形態と、前記清潔区域よりも下方の区域に前記操作ハンドルの前記操作領域の少なくとも一部が位置するように前記操作ハンドルを保持する第2形態との間で遷移可能に構成されている、遠隔操作装置。 - 前記清潔区域は、前記床面から70cm以上に設定されている、請求項4に記載の遠隔操作装置。
- 前記遠隔操作装置が前記第2形態をとる状態における前記操作ハンドルの前記操作領域の下限の高さ位置は、前記遠隔操作装置が前記第1形態をとる状態における前記操作ハンドルの前記操作領域の下限の高さ位置よりも48cm以上下方である、請求項4又は5に記載の遠隔操作装置。
- 手術マニピュレータによって実行されるべき動作態様指令を手術マニピュレータに対して送信する遠隔操作装置であって、
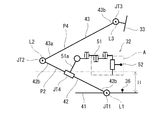
支持脚と、水平方向に延在する第1軸を介して基端部が前記支持脚に取り付けられ前記第1軸周りに揺動可能な下側支持部と、水平方向に延在する第2軸を介して基端部が前記下側支持部の先端部に取り付けられ前記第2軸周りに揺動可能な上側支持部とを含む支持機構と、
前記下側支持部の後方に位置するように前記下側支持部に取り付けられ、前記手術マニピュレータによって実行されるべき動作態様指令を入力するための操作ハンドルと、
を備える、遠隔操作装置。 - 前記下側支持部は、前記支持脚から斜め上前方に延びる起立角度位置と前記起立角度位置から前方に回動した倒伏角度位置との間で揺動可能であり、前記上側支持部は、前記起立角度位置に位置する前記下側支持部の先端部から斜め上後方に延びる拡開角度位置と、該拡開角度位置よりも前記下側支持部と成す角の角度が小さい縮閉角度位置との間で揺動可能である、請求項7に記載の遠隔操作装置。
- 前記第1軸と前記第2軸は、略平行である、請求項7又は8に記載の遠隔操作装置。
- 前記操作ハンドルは、所定の操作領域内で動かすことができるように構成され、
前記支持機構は、前記下側支持部が前記起立角度位置に位置し且つ前記上側支持部が前記拡開角度位置に位置する第1形態において、前記遠隔操作装置が設置される床面から85cm以上の第1高さ位置に前記操作領域の中立位置に位置する前記操作ハンドルを位置させて該操作ハンドルを保持し、且つ前記下側支持部が倒伏角度位置に位置し且つ前記上側支持部が縮閉角度位置に位置する第2形態において、前記第1高さ位置から48cm以上下方の第2高さ位置に前記操作領域の中立位置に位置する前記操作ハンドルを位置させて該操作ハンドルを保持する、請求項8に記載の遠隔操作装置。 - 前記操作ハンドルは、所定の操作領域内で動かすことができるように構成され、
前記支持機構は、前記下側支持部が前記起立角度位置に位置し且つ前記上側支持部が前記拡開角度位置に位置する第1形態において、前記遠隔操作装置が設置される床面から所定の高さ以上に設定された清潔区域に前記操作ハンドルの前記操作領域が収まるように前記操作ハンドルを保持し、且つ前記下側支持部が倒伏角度位置に位置し且つ前記上側支持部が縮閉角度位置に位置する第2形態において、該清潔区域よりも下方の区域に前記操作ハンドルの前記操作領域の少なくとも一部が位置するように前記操作ハンドルを保持する、請求項8に記載の遠隔操作装置。 - 前記清潔区域は、床面から70cm以上に設定されている、請求項11に記載の遠隔操作装置。
- 手術マニピュレータによって実行されるべき動作態様指令を手術マニピュレータに対して送信し、且つ内視鏡カメラプローブが撮影した画像を受信する遠隔操作装置であって、
前記手術マニピュレータによって実行されるべき動作態様指令を入力するための操作ハンドルと、前記内視鏡カメラプローブが撮影した画像を表示する表示部と、前記操作ハンドル及び前記表示部を支持する支持機構とを備え、
操作者が立位で操作するのに適応した第1形態と、前記操作者が座位で操作するのに適応した第2形態とで、相互に形態を変形することが可能なように構成され、
前記支持機構は、前記第1形態と前記第2形態のそれぞれにおいて、前記操作ハンドルに対する前記表示部の相対的な位置を変更可能に前記表示部を支持する、遠隔操作装置。 - 前記表示部は、水平方向に延在する軸線周りに回動可能に前記支持機構に取り付けられている、請求項13に記載の遠隔操作装置。
- 手術マニピュレータによって実行されるべき動作態様指令を前記手術マニピュレータに対して送信し、且つ内視鏡カメラプローブが撮影した画像を受信する遠隔操作装置であって、
内視鏡カメラプローブが撮影した画像を受信し、当該受信した画像を表示する表示装置を備え、
操作者が立位で操作するのに適応した第1形態と、前記操作者が座位で操作するのに適応した第2形態とで、相互に形態を変形することが可能なように構成され、
前記第1の表示装置は前記第1形態において前記操作者が視認するのに適した高さに設けられ、前記第2形態においては前記表示装置とは異なる他の表示装置が用いられるように構成した、遠隔操作装置。 - 前記他の表示装置が角度調整可能に取り付けられていることを特徴とする、請求項15に記載の遠隔操作装置。
- 請求項15又は16の何れかに記載の遠隔操作装置と、前記遠隔操作装置の外部に設置された前記他の表示装置とを含む、遠隔手術システム。
- 手術マニピュレータによって実行されるべき動作態様指令を手術マニピュレータに対して送信する遠隔操作装置であって、
所定の操作領域内で動かすことができるように構成され、前記手術マニピュレータによって実行されるべき動作態様指令を入力するための操作ハンドルを備え、
操作者が立位で操作するのに適応した第1形態と、前記操作者が座位で操作するのに適応した第2形態とで、相互に形態を変形することが可能なように構成され、
前記第1形態及び前記第2形態との間で形態を変形する場合には、前記操作ハンドルによる操作が無効化される、若しくは前記動作態様指令の送信が無効化されるように構成される、遠隔操作装置。 - 手術マニピュレータによって実行されるべき動作態様指令を前記手術マニピュレータに対して送信する遠隔操作装置と、前記手術マニピュレータを含み、前記動作態様指令に応答して前記手術マニピュレータを動作させる患者側手術装置と、を含む遠隔手術システムであって、
前記遠隔操作装置は、
所定の操作領域内で動かすことができるように構成され、前記手術マニピュレータによって実行されるべき動作態様指令を入力するための操作ハンドルと、該操作ハンドルを支持する支持機構とを備え、
前記支持機構は、前記遠隔操作装置が設置される床面から85cm以上の第1高さ位置に前記操作領域の中立位置に位置する前記操作ハンドルを位置させることができるように前記操作ハンドルを保持する第1形態と、前記第1高さ位置から前記操作ハンドルを移動させて48cm以上下方の第2高さ位置に前記操作領域の中立位置に位置する前記操作ハンドルを位置させて該操作ハンドルを保持する第2形態との間で遷移可能に構成されている、遠隔操作装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242726A JP6673684B2 (ja) | 2015-12-11 | 2015-12-11 | 遠隔操作装置及び遠隔手術システム |
| EP19206671.0A EP3628261A1 (en) | 2015-12-11 | 2016-12-02 | Remote control apparatus and remote surgical system |
| EP16201987.1A EP3184069B1 (en) | 2015-12-11 | 2016-12-02 | Remote control apparatus and remote surgical system |
| US15/372,682 US10064692B2 (en) | 2015-12-11 | 2016-12-08 | Remote control apparatus and remote surgical system |
| CN201611129304.3A CN107028662B (zh) | 2015-12-11 | 2016-12-09 | 远程操作装置及远程手术系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242726A JP6673684B2 (ja) | 2015-12-11 | 2015-12-11 | 遠隔操作装置及び遠隔手術システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017239158A Division JP6654180B2 (ja) | 2017-12-14 | 2017-12-14 | 遠隔操作装置及び遠隔手術システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017104455A true JP2017104455A (ja) | 2017-06-15 |
| JP6673684B2 JP6673684B2 (ja) | 2020-03-25 |
Family
ID=57544211
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015242726A Expired - Fee Related JP6673684B2 (ja) | 2015-12-11 | 2015-12-11 | 遠隔操作装置及び遠隔手術システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10064692B2 (ja) |
| EP (2) | EP3628261A1 (ja) |
| JP (1) | JP6673684B2 (ja) |
| CN (1) | CN107028662B (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018225819A1 (ja) * | 2017-06-08 | 2018-12-13 | 株式会社メディカロイド | 遠隔操作装置および遠隔操作システム |
| WO2018225818A1 (ja) * | 2017-06-08 | 2018-12-13 | 株式会社メディカロイド | 遠隔操作装置、表示装置、遠隔操作システム、手術支援システムおよび遠隔操作装置の表示装置の交換方法 |
| EP3643266A1 (en) | 2018-10-23 | 2020-04-29 | A-Traction Inc. | Surgery supporting apparatus for controlling motion of robot arm, control method of the same, and non-transitory computer-readable storage medium |
| JP2021137667A (ja) * | 2020-02-21 | 2021-09-16 | 株式会社メディカロイド | 手術システム |
| CN116549132A (zh) * | 2023-05-19 | 2023-08-08 | 哈尔滨思哲睿智能医疗设备股份有限公司 | 一种手术机器人系统及手术机器人系统的控制处理设备 |
| JP2025141925A (ja) * | 2024-03-13 | 2025-09-29 | グローバス メディカル インコーポレイティッド | 外科ロボットシステム |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018202032A (ja) * | 2017-06-08 | 2018-12-27 | 株式会社メディカロイド | 医療器具の遠隔操作装置 |
| CN110996826B (zh) | 2017-07-27 | 2023-04-25 | 直观外科手术操作公司 | 医疗装置手柄 |
| CN109498162B (zh) * | 2018-12-20 | 2023-11-03 | 深圳市精锋医疗科技股份有限公司 | 提升沉浸感的主操作台及手术机器人 |
| CN109806002B (zh) * | 2019-01-14 | 2021-02-23 | 微创(上海)医疗机器人有限公司 | 一种手术机器人 |
| WO2021041249A1 (en) * | 2019-08-23 | 2021-03-04 | Intuitive Surgical Operations, Inc. | Moveable display system |
| US11826115B2 (en) | 2020-09-14 | 2023-11-28 | Verb Surgical Inc. | Adjustable user console for a surgical robotic system |
| CN114424975B (zh) * | 2020-10-29 | 2024-02-09 | 上海微创医疗机器人(集团)股份有限公司 | 手术机器人辅助系统、方法、介质、终端及手术机器人 |
| US12544173B2 (en) | 2020-11-30 | 2026-02-10 | Intuitive Surgical Operations, Inc. | Techniques for adjusting a display unit of a viewing system |
| CN116763440A (zh) * | 2022-03-07 | 2023-09-19 | 瑞龙诺赋(上海)医疗科技有限公司 | 一种医生控制台的控制方法、医生控制台及手术系统 |
| USD1100555S1 (en) | 2023-09-29 | 2025-11-04 | Gasser Chair Co., Inc. | Chair |
| USD1093978S1 (en) | 2023-09-29 | 2025-09-23 | Gasser Chair Co., Inc. | Chair |
| USD1064690S1 (en) | 2023-09-29 | 2025-03-04 | Gasser Chair Co., Inc. | Handle |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002537884A (ja) * | 1999-03-03 | 2002-11-12 | コンピュータ・モーション・インコーポレーテッド | 最小侵襲性外科手術処置を行うための方法および装置 |
| JP2003225198A (ja) * | 2002-02-06 | 2003-08-12 | Olympus Optical Co Ltd | 内視鏡用画像表示装置 |
| JP2005526567A (ja) * | 2002-05-23 | 2005-09-08 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 可変高さの制御パネルを有する超音波検査システムカート |
| JP2008126015A (ja) * | 2006-11-27 | 2008-06-05 | Hitachi Medical Corp | 超音波診断装置 |
| JP2009178230A (ja) * | 2008-01-29 | 2009-08-13 | Terumo Corp | 手術システム |
| WO2014151621A1 (en) * | 2013-03-15 | 2014-09-25 | Sri International | Hyperdexterous surgical system |
| WO2015143073A1 (en) * | 2014-03-19 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Medical devices, systems, and methods integrating eye gaze tracking for stereo viewer |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5855583A (en) * | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6852107B2 (en) * | 2002-01-16 | 2005-02-08 | Computer Motion, Inc. | Minimally invasive surgical training using robotics and tele-collaboration |
| US7607440B2 (en) * | 2001-06-07 | 2009-10-27 | Intuitive Surgical, Inc. | Methods and apparatus for surgical planning |
| JP2005342056A (ja) * | 2004-05-31 | 2005-12-15 | Matsushita Electric Ind Co Ltd | 超音波診断装置 |
| US8463439B2 (en) * | 2009-03-31 | 2013-06-11 | Intuitive Surgical Operations, Inc. | Optic fiber connection for a force sensing instrument |
| US9492240B2 (en) * | 2009-06-16 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Virtual measurement tool for minimally invasive surgery |
| US7439694B2 (en) * | 2005-09-01 | 2008-10-21 | Atlas Richard B | Adjustable lectern system |
| US9266239B2 (en) * | 2005-12-27 | 2016-02-23 | Intuitive Surgical Operations, Inc. | Constraint based control in a minimally invasive surgical apparatus |
| US8219178B2 (en) * | 2007-02-16 | 2012-07-10 | Catholic Healthcare West | Method and system for performing invasive medical procedures using a surgical robot |
| EP2019606B1 (en) * | 2006-05-01 | 2020-01-08 | Linak A/S | Electrically adjustable table |
| US9043018B2 (en) * | 2007-12-27 | 2015-05-26 | Intuitive Surgical Operations, Inc. | Medical device with orientable tip for robotically directed laser cutting and biomaterial application |
| US8120301B2 (en) * | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| JP5562583B2 (ja) * | 2009-06-24 | 2014-07-30 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用ロボットシステム |
| US8808369B2 (en) * | 2009-10-05 | 2014-08-19 | Mayo Foundation For Medical Education And Research | Minimally invasive aortic valve replacement |
| WO2011116332A2 (en) * | 2010-03-18 | 2011-09-22 | SPI Surgical, Inc. | Surgical cockpit comprising multisensory and multimodal interfaces for robotic surgery and methods related thereto |
| JP5715304B2 (ja) | 2011-07-27 | 2015-05-07 | エコール ポリテクニーク フェデラル デ ローザンヌ (イーピーエフエル) | 遠隔操作のための機械的遠隔操作装置 |
| US9713499B2 (en) * | 2011-12-05 | 2017-07-25 | Mazor Robotics Ltd. | Active bed mount for surgical robot |
| CN202365165U (zh) * | 2011-12-08 | 2012-08-08 | 白斌 | 多功能便携折叠电脑桌 |
| CN202919413U (zh) * | 2012-10-26 | 2013-05-08 | 余亦枢 | 笔记本电脑桌支撑板及笔记本电脑桌 |
| JP6251756B2 (ja) * | 2013-02-26 | 2017-12-20 | アーメット・シナン・カバクチュAhmet Sinan KABAKCI | ロボットマニュピレータシステム |
| CN105338920B (zh) * | 2013-03-15 | 2018-01-26 | 直观外科手术操作公司 | 用于利用零空间跟踪路径的系统和方法 |
| WO2015058768A1 (en) * | 2013-05-10 | 2015-04-30 | Linak A/S | Height adjustable table |
| CN204048597U (zh) * | 2014-09-26 | 2014-12-31 | 黑龙江职业学院 | 一种心理学用电动折叠桌 |
| US9538962B1 (en) * | 2014-12-31 | 2017-01-10 | Verily Life Sciences Llc | Heads-up displays for augmented reality network in a medical environment |
| WO2016137527A1 (en) | 2015-02-24 | 2016-09-01 | Sri International | Hyperdexterous system user interface |
| AU2015392228B2 (en) | 2015-04-23 | 2020-04-16 | Sri International | Hyperdexterous surgical system user interface devices |
-
2015
- 2015-12-11 JP JP2015242726A patent/JP6673684B2/ja not_active Expired - Fee Related
-
2016
- 2016-12-02 EP EP19206671.0A patent/EP3628261A1/en active Pending
- 2016-12-02 EP EP16201987.1A patent/EP3184069B1/en active Active
- 2016-12-08 US US15/372,682 patent/US10064692B2/en active Active
- 2016-12-09 CN CN201611129304.3A patent/CN107028662B/zh not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002537884A (ja) * | 1999-03-03 | 2002-11-12 | コンピュータ・モーション・インコーポレーテッド | 最小侵襲性外科手術処置を行うための方法および装置 |
| JP2003225198A (ja) * | 2002-02-06 | 2003-08-12 | Olympus Optical Co Ltd | 内視鏡用画像表示装置 |
| JP2005526567A (ja) * | 2002-05-23 | 2005-09-08 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 可変高さの制御パネルを有する超音波検査システムカート |
| JP2008126015A (ja) * | 2006-11-27 | 2008-06-05 | Hitachi Medical Corp | 超音波診断装置 |
| JP2009178230A (ja) * | 2008-01-29 | 2009-08-13 | Terumo Corp | 手術システム |
| WO2014151621A1 (en) * | 2013-03-15 | 2014-09-25 | Sri International | Hyperdexterous surgical system |
| WO2015143073A1 (en) * | 2014-03-19 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Medical devices, systems, and methods integrating eye gaze tracking for stereo viewer |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018225819A1 (ja) * | 2017-06-08 | 2018-12-13 | 株式会社メディカロイド | 遠隔操作装置および遠隔操作システム |
| WO2018225818A1 (ja) * | 2017-06-08 | 2018-12-13 | 株式会社メディカロイド | 遠隔操作装置、表示装置、遠隔操作システム、手術支援システムおよび遠隔操作装置の表示装置の交換方法 |
| JP2020044354A (ja) * | 2017-06-08 | 2020-03-26 | 株式会社メディカロイド | 遠隔操作装置および遠隔操作システム |
| US11529200B2 (en) | 2017-06-08 | 2022-12-20 | Medicaron Corporation | Remote control apparatus and remote control system |
| EP3643266A1 (en) | 2018-10-23 | 2020-04-29 | A-Traction Inc. | Surgery supporting apparatus for controlling motion of robot arm, control method of the same, and non-transitory computer-readable storage medium |
| KR20200045967A (ko) | 2018-10-23 | 2020-05-06 | 가부시키가이샤 에이-트랙션 | 수술 지원 장치, 그 제어 방법 및 기록 매체 |
| US11622822B2 (en) | 2018-10-23 | 2023-04-11 | A-Traction Inc. | Surgery supporting apparatus for controlling motion of robot arm, control method of the same, and non-transitory computer-readable storage medium |
| US12496148B2 (en) | 2018-10-23 | 2025-12-16 | A-Traction Inc. | Surgery supporting apparatus for controlling motion of robot arm |
| JP2021137667A (ja) * | 2020-02-21 | 2021-09-16 | 株式会社メディカロイド | 手術システム |
| JP7128326B2 (ja) | 2020-02-21 | 2022-08-30 | 株式会社メディカロイド | 手術システム |
| CN116549132A (zh) * | 2023-05-19 | 2023-08-08 | 哈尔滨思哲睿智能医疗设备股份有限公司 | 一种手术机器人系统及手术机器人系统的控制处理设备 |
| JP2025141925A (ja) * | 2024-03-13 | 2025-09-29 | グローバス メディカル インコーポレイティッド | 外科ロボットシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107028662A (zh) | 2017-08-11 |
| EP3628261A1 (en) | 2020-04-01 |
| US20170165014A1 (en) | 2017-06-15 |
| US10064692B2 (en) | 2018-09-04 |
| CN107028662B (zh) | 2020-07-03 |
| EP3184069B1 (en) | 2020-02-05 |
| JP6673684B2 (ja) | 2020-03-25 |
| EP3184069A1 (en) | 2017-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10980604B2 (en) | Remote control apparatus for medical equipment | |
| JP6673684B2 (ja) | 遠隔操作装置及び遠隔手術システム | |
| US20230240765A1 (en) | Remote control apparatus | |
| US20190314005A1 (en) | Remote control apparatus, surgical system, and method of identifying target pedal | |
| JP6836642B2 (ja) | 遠隔操作装置および遠隔操作システム | |
| JP6778326B2 (ja) | マスタ操作入力装置およびマスタスレーブマニピュレータ | |
| JP2022545684A (ja) | トラック上の移動可能なディスプレイユニット | |
| JP2023078478A (ja) | 遠隔操作装置および手術支援システム | |
| JP6757340B2 (ja) | 医療器具の遠隔操作装置 | |
| JP6960505B2 (ja) | 遠隔操作装置 | |
| JP6745392B2 (ja) | 遠隔操作装置 | |
| JP6654180B2 (ja) | 遠隔操作装置及び遠隔手術システム | |
| JP2020049300A (ja) | 遠隔操作装置及び遠隔手術システム | |
| WO2018225818A1 (ja) | 遠隔操作装置、表示装置、遠隔操作システム、手術支援システムおよび遠隔操作装置の表示装置の交換方法 | |
| JP6665263B2 (ja) | 遠隔操作装置、手術システムおよび操作対象ペダルの特定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170922 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171024 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180501 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180627 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180731 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181026 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20181106 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20190201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200305 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6673684 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |