JP2017104914A - 外力追従制御システム - Google Patents
外力追従制御システム Download PDFInfo
- Publication number
- JP2017104914A JP2017104914A JP2015238540A JP2015238540A JP2017104914A JP 2017104914 A JP2017104914 A JP 2017104914A JP 2015238540 A JP2015238540 A JP 2015238540A JP 2015238540 A JP2015238540 A JP 2015238540A JP 2017104914 A JP2017104914 A JP 2017104914A
- Authority
- JP
- Japan
- Prior art keywords
- external force
- control system
- robot arm
- target value
- tracking control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Robotics (AREA)
- Surgery (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Human Computer Interaction (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Endoscopes (AREA)
Abstract
Description
制御部では、外力計測用センサの情報から各関節に加わるトルクを分離し、設定された関節部仮想インピーダンスからアーム関節部の逃げ量を算出する。
また、設定された手先部仮想インピーダンスからアーム手先の逃げ量を算出する。
そして、制御部では、手先部の逃げ量に、アーム関節部の逃げ量を加算して駆動指令をアームに与える。これにより、アームのどの部位に外力が加わっても適切な回避行動が行われる。
このような内視鏡ホルダロボットでは、アームが外力による負荷から開放(除荷)されると、外力が加わる前の姿勢にアームを復帰させようとする。
このため、アームに装着されている光学視管の位置が急激に移動して、内視鏡によって見えていた体内の被観察部位が観察できなくなってしまう。
外力が加わると、位置目標値が外力により移動したロボットアームの位置に合わせて修正される。
このため、位置目標値に応じて、移動されたロボットアームは、ロボットアームに加わった外力がなくなっても、外力が加わる以前のもとの位置まで戻ることはない。
この実施形態の制御対象である内視鏡ホルダロボット10は、主に、ロボット本体11と、ロボット本体11に対して、鉛直方向の軸Yを回転中心として回転可能に設けられた伸縮アーム部30と、この伸縮アーム部30に設けられて、硬性内視鏡20を保持する内視鏡ホルダ部40とを備えている。
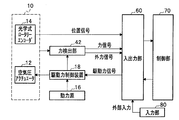
そして、カメラヘッド部24のCCDイメージセンサから出力された画像信号は、画像生成装置により出力画像信号として生成されて、出力されることにより図示しないモニタに体内の被観察部位を映し出すように構成されている。
内視鏡ホルダロボット10は、入出力部60を介して、制御部70に接続されている。
この実施形態の内視鏡ホルダロボット10は、ロボット本体11の鉛直方向の軸Y(図1参照)を回転中心として伸縮アーム部30を回転駆動するアクチュエータとしての空気圧アクチュエータ12と、この空気圧アクチュエータ12によって回転した伸縮アーム部30の回転角度を検出する位置検出手段としての光学式ロータリーエンコーダ14を含む。
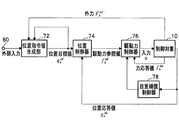
図3は、実施形態の外力追従制御システムで、機能ブロック図である。この実施形態の内視鏡ホルダロボット10の位置制御系は、主に、制御部70内に設けられていて、位置指令値生成部72、位置制御器74、駆動力制御器76、自重補償制御器78を含んでいる。
この位置指令値生成部72には、さらに、制御対象である内視鏡ホルダロボット10の伸縮アーム部30の状態(回転角度)および推定もしくは計測した外力の値を状態量として位置目標値を生成し、この位置目標値を出力する。
また、前記光学式ロータリーエンコーダ14で検出された実際の伸縮アーム部30の回転位置を示す位置応答値は、入出力部60を介して制御部70に入力されている。位置応答値は、位置応答値としては、このような位置検出部からの位置信号に限らず、この位置信号が生成した信号(速度推定値など)を位置応答値として用いてもよい。
位置制御器74は、位置目標値と制御対象からの位置応答値との差分を0にするような位置制御のために演算を実行し、その演算結果として駆動力参照値を生成している。駆動力参照値は、位置制御器74から出力されることによりアクチュエータを駆動してロボットアームの位置を指令する。
駆動力制御器76は、駆動力参照値と制御対象からの力応答値(=力信号)との差分を0にするような駆動力信号を、制御対象である内視鏡ホルダロボット10に入力として与えて駆動力制御を実行している。この実施形態の入力は、駆動力制御装置18として実装されているサーボ弁118等への印加電圧(V)である。
自重補償制御器78は、予め想定される内視鏡ホルダロボット10の自重の影響を取り除くためのものである。
すなわち、伸縮アーム部30は、内視鏡の光学視管22を装着した状態で、動作位置(回転角度)によって、自重による影響を相違させる。このため、自重補償制御器78を用いて、このような内視鏡ホルダロボット10の自重の影響をキャンセルさせる自重補償力をフィードフォワード補償として行なうことにより、さらに制御特性を向上させることができる。
力検出部42は、たとえば推定値を算出するアルゴリズムであってもよい。また、内視鏡ホルダロボット10内に設けられた力センサなどの手段を用いて力信号を得るように構成してもよい。
この実施形態では、位置指令値生成部72において、外力により生じた伸縮アーム部30の位置偏差、あるいは外力信号が取得される。
そして、制御対象に事前に設定した値を超える力が負荷として加えられた場合、コントローラ80による位置目標値を力が逃げる(除荷される)方向に修正するように構成されている。
これに対して本実施形態の外力追従制御システムでは、位置目標値を外力に応じて更新しながら上書きする。このため、負荷の開放による伸縮アーム部30の戻り動作が発生しない。
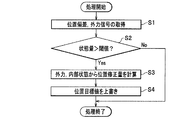
すなわち、図4にて、処理が開始されると、ステップS1では、位置偏差、外力信号が取得される。
ここで、偏差が予め設定された閾値eLimitを超えていた場合、ステップS2において下記の数1の式(1)にて、位置目標値qref(例えば30度)を修正する。

ステップS3では、外力、内部状態から位置修正量を計算する。この位置修正には、修正アルゴリズムが操作する時間Tの設定が含まれる。
そして、修正処理が開始されてからの時間がカウントされて、アルゴリズムの動作時間内である場合は、ステップS3において、下記の数2の差分方程式(式2)にて位置目標値を修正する。
ここで、Tは収束させるための時間、stは制御周期、Qは修正速度を調整するパラメータである。
ステップS4では、位置目標値を更新しながら上書きして処理を終了する。
また、この実施形態の外力追従制御システムでは、光学式ロータリーエンコーダ14によって検出された状態量として位置偏差のみを用いることで、外力信号および外力の検出手段もしくは外力の推定機構を別途設ける必要がない。
したがって、たとえば空気圧アクチュエータなどバックドライバビリティが存在する医療用ロボットなどに用いて好適である。
図5中、測定開始から4秒が経過した時点aにて、図6中矢印で示すように周方向に伸縮アーム部30を回転させる外力が加わると、伸縮アーム部30の回転角度が増大する。そして、位置指令値と位置応答値との間の乖離が30度をこえた時点bから位置指令値の追従が開始される。
そして、時点eにて、伸縮アーム部30に加わっていた外力が除荷される。
時点eから、時点fまでの時間にて伸縮アーム部30は、位置制御の働きによって、位置指令値によって指定された角度(ここでは約72度)に戻る(図6(c)参照)。
このため、急激に元の外力が加わる前の姿勢となることなく、この例では、約80度の位置に伸縮アーム部30は停止し続ける。したがって、伸縮アーム部30に装着されている光学視管22の位置が移動しないため、継続して体内の被観察部位を安全に観察できる。
(位置を基準とする方式)
なお、前記実施形態の図2と同一部分には、同一符号を付して説明を省略する。
まず構成から説明すると、この実施例1の外力追従制御システムでは、内視鏡ホルダロボット110の駆動力制御装置としてサーボ弁118が設けられている。
そして、制御部70では、この力信号を力応答値として用いて駆動力信号を生成することにより、内視鏡ホルダロボット110の伸縮アーム部30を空気圧アクチュエータ12によって駆動するように構成されている。
この実施例1の内視鏡ホルダロボット110の位置制御系は、主に、制御部70内に設けられていて、位置指令値生成部72、位置制御器74、駆動力制御器76、自重補償制御器78を含んでいる。
そして、状態量として伸縮アーム部30の回転位置を用いて偏差から、外力を推定して、位置目標値を修正するように、駆動力制御器76は、入力uを制御対象である内視鏡ホルダロボット10に与えるように構成されている。
すなわち、図9にて、処理が開始されると、ステップS11では、位置偏差が取得される。
また、位置偏差が閾値を上回っていない場合(ステップS12にてNO)には、処理をステップS14に進める。
これにより、実施例1の外力追従制御システムでは、無負荷時は指令通りに正確に動作し、かつ外力により移動している状態から除荷されても、アームの位置を保持することが出来る。
図10は、実施例2の外力追従制御システムで、各部の構成を説明する構成図である。
なお、前記実施形態および実施例1と同一部分には、同一符号を付して説明を省略し、各部の構成について相違点を中心に説明する。
この力センサ124は、内視鏡ホルダロボット210の可動部分である伸縮アーム部30などに設けられて、伸縮アーム部30に加えられる外力を検出可能としている。力センサ124によって検出された外力は外力信号として入出力部60に送られるように構成されている。
このように構成された実施例2の外力追従制御システムでは、圧力センサ120で検出された外力Fextが、閾値Fext Limitを超えた場合、図4のステップS3にて、以下の数3の式(3)を用いて位置目標値qrefが修正される。
ここで、Kは外力と位置修正値とを関係づける仮想コンプライアンスである。Kは、たとえばバネのような概念である。また、Tは収束させるための時間、stは制御周期、Qは修正速度を調整するパラメータである。なお、後述するばねの概念に加えてダンパ成分や質量も加えた概念(仮想インピーダンス)を用いてもよい。
他の構成および作用効果については、前記実施形態および実施例1と同様であるので説明を省略する。
(外力を推定する方式)
なお、前記実施形態および実施例1,2と同一部分には、同一符号を付して説明を省略する。
まず構成上の相違点から説明すると、実施例3の外力追従制御システムに用いられる制御部170には、外力推定器171が設けられている。
外力推定器171は、伸縮アーム部30に加わる外力を、空気圧アクチュエータ12の駆動状況から推定して算出することができる。
そして、伸縮アーム部30に加えられた力から、伸縮アーム部30の駆動のために内視鏡ホルダロボット10が使用した力を引くことにより、伸縮アーム部30にかかっている外力が推定されるように構成されている。
他の構成および作用効果については、前記実施例3の外力追従制御システムの作用効果と同様であるので説明を省略する。
よって、伸縮アーム部30に装着されている光学視管22の位置が移動しないため、継続して体内の被観察部位を安全に観察できる。
また、入力部として、コントローラ80を示して説明してきたがジャイロセンサやパネル入力など、他の入力装置を用いて、入力部が構成されていてもよい。
さらに、力検出部としての圧力センサ120などを用いるものを示して説明してきたが、特にこれに限らず、たとえば、力センサ、電流検出回路などでもよく、その他、力を推定する力推定手段などを用いてもよい。
さらに、実施例3にて設明したように外力と位置修正値とを関係づけるために例えば、仮想の粘性、質量を考慮した仮想インピーダンスなどを用いるとなおよい。
11 ロボット本体
12 空気圧アクチュエータ
14 光学式ロータリーエンコーダ
16 動力源
18 動力制御装置
20 硬性内視鏡
22 光学視管
24 カメラヘッド部
30 伸縮アーム部
40 内視鏡ホルダ部
42 力検出部
60 入出力部
70 制御部
72 位置指令値生成部
74 位置制御器
76 駆動力制御器
78 自重補償制御器
80 コントローラ(入力部)
110 内視鏡ホルダロボット
116 圧縮空気源
118 サーボ弁
120 圧力センサ
122 力検出部
124 力センサ
170 制御部
171,271,371 外力推定器
210 内視鏡ホルダロボット
Claims (11)
- ロボットアームと、
前記ロボットアームの位置を位置目標値を用いて指示する入力部と、
前記入力部から入力された位置目標値に応じて、前記ロボットアームを移動させるアクチュエータと、
前記ロボットアームの位置を検出する位置検出部と、
前記位置検出手段で検出されたロボットアームの位置を示す位置応答値と、前記位置目標値との差分に応じて、前記アクチュエータを駆動する制御部と、を備え、
前記制御部は、前記ロボットアームの状態量に応じて前記位置目標値を修正することを特徴とする、外力追従制御システム。 - 前記制御部は、前記ロボットアームに加えられている外力に応じて前記位置目標値を修正することを特徴とする、請求項1に記載の外力追従制御システム。
外力追従制御システム。 - 前記制御部は、前記外力によって移動したロボットアームの位置を、外力が除荷されても、前記外力によって移動する前の位置に戻さないことを特徴とする請求項1または2に記載の外力追従制御システム。
- 前記制御部は、前記位置目標値と前記ロボットアームに外力が加えられて移動した位置との間の該ロボットアームの移動量が予め設定された閾値を超えた場合に、前記位置目標値を上書きすることを特徴とする、請求項1ないし3のうち一項に記載の外力追従制御システム。
- 前記アクチュエータに加えられた外力を検出して外力信号として出力する力センサをさらに備え、前記制御部は、外力信号に応じて、前記位置目標値を上書きすることを特徴とする、請求項1ないし4のうち一項に記載の外力追従制御システム。
- 前記制御部は、前記ロボットアームの移動量が予め設定された閾値を超えた場合に、外力信号に応じて、前記位置目標値を上書きすることを特徴とする、請求項1ないし5のうち一項に記載の外力追従制御システム。
- 前記制御部は、制御用センサにて検出された圧力値から得られる力信号を外力信号として用いることを特徴とする、請求項5または6に記載の外力追従制御システム。
- 前記アクチュエータに設けられた制御用の圧力センサとは、別体で前記ロボットアームに加わる外力を検出する力センサを設けて、前記制御部は、前記力センサにて検出された外力に基づく外力信号を用いて、位置目標値を修正することを特徴とする、請求項1ないし7のうち一項に記載の外力追従制御システム。
- 前記制御部は、前記ロボットアームに加わる外力を、前記アクチュエータの駆動状況から算出する外力推定部を含むことを特徴とする請求項1ないし8うち一項に記載の外力追従制御システム。
- 前記ロボットアームは、空気圧アクチュエータによって駆動される医療用ロボットのアームであることを特徴とする請求項1ないし9のうち一項に記載の外力追従制御システム。
- 前記ロボットアームは、電動モータによって駆動されるロボットのアームであることを特徴とする請求項1ないし9のうち一項に記載の外力追従制御システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015238540A JP2017104914A (ja) | 2015-12-07 | 2015-12-07 | 外力追従制御システム |
| PCT/JP2016/085752 WO2017098989A1 (ja) | 2015-12-07 | 2016-12-01 | 外力追従制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015238540A JP2017104914A (ja) | 2015-12-07 | 2015-12-07 | 外力追従制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017104914A true JP2017104914A (ja) | 2017-06-15 |
| JP2017104914A5 JP2017104914A5 (ja) | 2018-03-08 |
Family
ID=59014113
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015238540A Pending JP2017104914A (ja) | 2015-12-07 | 2015-12-07 | 外力追従制御システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017104914A (ja) |
| WO (1) | WO2017098989A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020050314A1 (ja) * | 2018-09-06 | 2020-03-12 | リバーフィールド株式会社 | アーム装置、制御方法、およびプログラム |
| WO2021161718A1 (ja) * | 2020-02-12 | 2021-08-19 | リバーフィールド株式会社 | 手術ロボット、及び手術ロボットの制御ユニット |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021003201A (ja) * | 2019-06-25 | 2021-01-14 | ソニー株式会社 | 手術顕微鏡システム、制御装置及び制御方法 |
| GB2596543B (en) | 2020-06-30 | 2025-02-19 | Cmr Surgical Ltd | Controlling a surgical instrument |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0639760A (ja) * | 1992-07-23 | 1994-02-15 | Hitachi Ltd | ロボットの制御装置 |
| JP2000279463A (ja) * | 1999-03-31 | 2000-10-10 | Sanyo Electric Co Ltd | 上肢機能回復訓練装置 |
| JP2006230691A (ja) * | 2005-02-24 | 2006-09-07 | Shin Meiwa Ind Co Ltd | 医療機器支持アーム |
| JP2009018380A (ja) * | 2007-07-12 | 2009-01-29 | Toyota Motor Corp | ロボット、ロボットの制御方法、及びロボットの制御システム |
| JP2009527366A (ja) * | 2006-02-24 | 2009-07-30 | フェルロボティクス コンプライアント ロボット テクノロジー ゲーエムベーハー | ロボットアーム |
| JP2010247309A (ja) * | 2009-04-20 | 2010-11-04 | Toyota Motor Corp | ロボットアーム、及びその制御方法 |
| JP2012130977A (ja) * | 2010-12-20 | 2012-07-12 | Toshiba Corp | ロボット制御装置 |
| JP2015100677A (ja) * | 2013-11-28 | 2015-06-04 | 国立大学法人東京工業大学 | 手術用ロボット |
| WO2015137140A1 (ja) * | 2014-03-12 | 2015-09-17 | ソニー株式会社 | ロボットアームの制御装置、ロボットアームの制御方法及びプログラム |
-
2015
- 2015-12-07 JP JP2015238540A patent/JP2017104914A/ja active Pending
-
2016
- 2016-12-01 WO PCT/JP2016/085752 patent/WO2017098989A1/ja not_active Ceased
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0639760A (ja) * | 1992-07-23 | 1994-02-15 | Hitachi Ltd | ロボットの制御装置 |
| JP2000279463A (ja) * | 1999-03-31 | 2000-10-10 | Sanyo Electric Co Ltd | 上肢機能回復訓練装置 |
| JP2006230691A (ja) * | 2005-02-24 | 2006-09-07 | Shin Meiwa Ind Co Ltd | 医療機器支持アーム |
| JP2009527366A (ja) * | 2006-02-24 | 2009-07-30 | フェルロボティクス コンプライアント ロボット テクノロジー ゲーエムベーハー | ロボットアーム |
| JP2009018380A (ja) * | 2007-07-12 | 2009-01-29 | Toyota Motor Corp | ロボット、ロボットの制御方法、及びロボットの制御システム |
| JP2010247309A (ja) * | 2009-04-20 | 2010-11-04 | Toyota Motor Corp | ロボットアーム、及びその制御方法 |
| JP2012130977A (ja) * | 2010-12-20 | 2012-07-12 | Toshiba Corp | ロボット制御装置 |
| JP2015100677A (ja) * | 2013-11-28 | 2015-06-04 | 国立大学法人東京工業大学 | 手術用ロボット |
| WO2015137140A1 (ja) * | 2014-03-12 | 2015-09-17 | ソニー株式会社 | ロボットアームの制御装置、ロボットアームの制御方法及びプログラム |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020050314A1 (ja) * | 2018-09-06 | 2020-03-12 | リバーフィールド株式会社 | アーム装置、制御方法、およびプログラム |
| JP2020039434A (ja) * | 2018-09-06 | 2020-03-19 | リバーフィールド株式会社 | アーム装置、制御方法およびプログラム |
| US12279838B2 (en) | 2018-09-06 | 2025-04-22 | Riverfield Inc. | Arm device, control method, and program |
| WO2021161718A1 (ja) * | 2020-02-12 | 2021-08-19 | リバーフィールド株式会社 | 手術ロボット、及び手術ロボットの制御ユニット |
| JP2021126229A (ja) * | 2020-02-12 | 2021-09-02 | リバーフィールド株式会社 | 手術ロボット、及び手術ロボットの制御ユニット |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017098989A1 (ja) | 2017-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6700669B2 (ja) | 制御方法、ロボット装置、プログラム、記録媒体、及び物品の製造方法 | |
| KR102222124B1 (ko) | 수술 지원 장치, 그 제어 방법, 기록 매체 및 수술 지원 시스템 | |
| JP6218634B2 (ja) | 内視鏡システム及び内視鏡の作動方法 | |
| CN105979848B (zh) | 医疗用系统以及处置器具的校准方法 | |
| WO2017098989A1 (ja) | 外力追従制御システム | |
| US11540699B2 (en) | Medical manipulator system | |
| JP6674655B2 (ja) | 相対データ較正装置と方法 | |
| JP6265853B2 (ja) | 医療用機器 | |
| JP2017514608A5 (ja) | ||
| JPWO2017033359A1 (ja) | 遠隔操作ロボットシステム | |
| CN102573599A (zh) | 医疗系统和控制方法 | |
| EP2773278A1 (en) | Surgical support device | |
| JP6858750B2 (ja) | 医療用観察装置、駆動制御方法、医療用観察システム及び支持アーム装置 | |
| WO2017022310A1 (ja) | 制御装置、制御方法及び医療用支持アーム装置 | |
| WO2012077335A1 (ja) | ロボットの制御装置及び制御方法、ロボット、並びに、制御プログラム | |
| CN118900668A (zh) | 手术机器人系统中的夹持力控制 | |
| EP4031223A1 (en) | Multi-articulated catheters with safety methods and systems for image-guided collaborative intravascular deployment | |
| US10092368B2 (en) | Medical apparatus with a medical optical appliance and a holding device and method for operating the medical apparatus | |
| KR101632034B1 (ko) | 수술 로봇 시스템 및 수술 로봇 시스템의 제어 방법 | |
| JP2024535362A (ja) | 手術用ロボットシステムの手術用器具の1つまたは複数の作動テンドンによって作動する関節式エンドエフェクタを制御する方法、及び関連する手術用ロボットシステム | |
| KR20150041346A (ko) | 다관절 매니퓰레이터 제어 방법 및 제어 시스템 | |
| EP3725255B1 (en) | Arm device | |
| JP6532531B2 (ja) | 医療用マニピュレータ制御装置 | |
| KR102503569B1 (ko) | 수술 로봇 장치 및 수술 로봇 장치의 하중 보상 방법 | |
| HK1225597A1 (zh) | 训练装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180125 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180125 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180125 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180306 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20181002 |