JP2017106533A - アクチュエータ - Google Patents
アクチュエータ Download PDFInfo
- Publication number
- JP2017106533A JP2017106533A JP2015240111A JP2015240111A JP2017106533A JP 2017106533 A JP2017106533 A JP 2017106533A JP 2015240111 A JP2015240111 A JP 2015240111A JP 2015240111 A JP2015240111 A JP 2015240111A JP 2017106533 A JP2017106533 A JP 2017106533A
- Authority
- JP
- Japan
- Prior art keywords
- motors
- drive
- driven gear
- gear
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Manipulator (AREA)
- Gear Transmission (AREA)
- Rehabilitation Tools (AREA)
Abstract
Description
以下、第1実施形態について図面を参照しつつ説明する。なお、以下において、アクチュエータ等の構成の説明の便宜上、上下左右前後等の方向を適宜使用する。これらの方向は、それぞれ図1等に示す「前」、「後」、「上」、「下」、「左」、「右」で注記された方向を指す。これらの方向は、図1に示すように、例えばアクチュエータを備えた動作補助装置を左足膝関節の外側に装着した装着者が起立姿勢である場合に対応している。なお、これらの方向の記載は、アクチュエータ等の各構成の位置関係を限定するものではない。例えば、動作補助装置を装着する部位が変更された場合や、装着者の姿勢が変更された場合等には適宜変更される。
本実施形態のアクチュエータは、一例として装着者Mの膝関節の回動動作を補助する動作補助装置(いわゆるアシストロボット)に利用される。図1は、動作補助装置を左膝の外側に装着した装着者Mの全身を表している。この図1において、動作補助装置1は、胴部用装具2と、股関節用ヒンジ3と、大腿部用アーム4と、大腿部用装具5と、脛部用装具6と、脛部用アーム7と、足首関節用ヒンジ8と、靴部9と、膝関節用アクチュエータ10を有している。
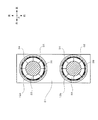
次に、図2を参照しつつ膝関節用アクチュエータ10の主要構成の一例を説明する。図2(a)は、膝関節用アクチュエータ10の外観を上方から見た上面図であり、図2(b)は、膝関節用アクチュエータ10の軸方向断面図であり、図2(c)は、図2(b)中の矢視IIc−IIcによる断面図である。
次に、ハイポイド減速機11における2つのドライブギア13a,13bとドリブンギア14との噛み合い構成の一例について説明する。ここで、一般的にハイポイドギアについては、食い違い軸の間に運動を伝達するのに用いる円錐又は円錐に近い形状を持つ歯車対と定義される。つまり、駆動側のドライブギア13a,13bと従動側のドリブンギア14がそれぞれ全体的に略円錐形状に形成されており、それぞれの回転軸がねじれの配置関係となって互いに外周側面上で噛み合う。このような噛み合いを可能にする各ギアの歯面形状は、歯数比(減速比)や食い違い軸間のオフセットE(図2(b)参照)などのパラメータによって決定される複雑な形状となる。このため、一つのドリブンギア14に対して適切に噛み合うためには、適合する同じ歯面形状のドライブギア13a,13bを同じ軸間配置関係(オフセットE、円錐頂点間の相対方向)でかみ合わせる必要がある。
次に、膝関節用アクチュエータ10における上記以外の構成の一例について順次説明する。
上記構成の膝関節用アクチュエータ10を制御する制御システムのブロック構成の一例を図5に示す。この図5において、制御システム100は、駆動制御部70と上記膝関節用アクチュエータ10を有している。
本実施形態では、1つのドリブンギア14に対して2つのドライブギア13a,13bを噛み合わせていることにより、2つのモータ12a,12bの間の協調制御でハイポイド減速機11におけるバックラッシュを低減できる。すなわち、上記制御システム100における駆動制御部70が2つのモータ12a,12bの間の回転角の位相や負荷トルクを制御することで、ハイポイド減速機11におけるバックラッシュを低減することが可能となり、2つのモータの駆動力を有効に使うことが可能となる。
以上説明したように、本実施形態の膝関節用アクチュエータ10によれば、歯車減速機としてハイポイド減速機11を用いているため、駆動軸15の軸方向における扁平化、軸駆動力の伝達効率の向上、及び静音化が可能になる。また2つのモータ12a,12bで必要駆動トルクを分担できるためそれぞれの外径を小さくでき、膝関節用アクチュエータ10全体の扁平化が可能になる。このような扁平化により膝関節用アクチュエータ10全体の設置空間領域を小さくでき、上記図1に示したような動作補助装置や産業ロボット等に利用した場合でも外部の障害物との干渉を回避させて円滑な動作が可能となる。また、各モータ12a,12bは外径を大きくせずとも回転子33及び固定子32の軸方向の長さを延長することで駆動トルクを向上させることができることから、膝関節用アクチュエータ10全体の扁平化を維持したまま駆動トルクを向上できる。また、同一のドリブンギア14に対し2つのモータ12a,12bがそれぞれドライブギア13a,13bで噛み合っているため、それらの協調制御によりハイポイド減速機11におけるバックラッシュを低減できる。以上の結果、大トルク化と外部干渉の回避とバックラッシュの低減の両立が可能となる。
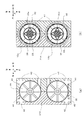
次に、第2実施形態について説明する。なお、第2実施形態では、主として膝関節用アクチュエータ10Aにおいて上記第1実施形態と異なる部分について説明する。また、上記第1実施形態と実質的に同一の機能を有する構成要素は、原則として同一の符号で表し、これらの構成要素についての重複説明は、適宜省略する。
以上説明した第2実施形態によれば、上記第1実施形態と同様の効果を得る。さらに、本実施形態の膝関節用アクチュエータ10Aによれば、ドリブンギア14Aの凹部19の内側位置に連結シャフト17a,17bを支持するボールベアリング38が設けられる。これにより、連結シャフト17a,17bの滑らかな回転を維持しつつ、連結シャフト17a,17bの撓みを抑えることができる。したがって、高負荷トルク時においてもドライブギア13a,13bとドリブンギア14Aとの距離が増大することを防止でき、高効率な噛み合いを維持できる。特に、ドライブギア13a,13bのうちモータ側に配置されるドライブギア13aについても連結シャフト17aを設けてボールベアリング38で保持するので、第1実施形態よりもギアの噛み合いの維持効果を高めることができる。
10,10A 膝関節用アクチュエータ
11 ハイポイド減速機
12a,12b モータ
13a,13b ドライブギア
14,14A ドリブンギア
15 駆動軸
16a,16b 出力軸
17a,17b 連結シャフト(連結部材)
18 歯部
19 凹部
21,21A 筐体(ケースの一例)
22 モータ開口部
23 キャップ
24 入力回転位置検出器
25 リード線
27 アンギュラベアリング
28 ボルト
30 蓋部(ケースの一例)
31 すべり軸受(保持部の一例)
32 固定子
33 回転子
34 ギャップワインドコイル
35 パラレル異方性配向リングマグネット
36 極異方性配向リングマグネット
38 ボールベアリング(軸受の一例)
39 ラジアルファン
40 外気吸入口
41 外気通路
42 外気排出口
50 第1薄円板部
51 第2薄円板部
63 出力回転位置検出器
70 駆動制御部
71 コントローラ
72,73 サーボアンプ
100 制御システム
AX 回転軸心
D 軸間距離
M 装着者
Claims (9)
- 2つのモータと、
ハイポイド減速機と、を有し、
前記ハイポイド減速機は、
前記2つのモータの出力軸にそれぞれ連結された2つのドライブギアと、
前記2つのドライブギアで駆動される1つのドリブンギアと、
を有することを特徴とするアクチュエータ。 - 前記2つのモータは、
それぞれの前記出力軸が平行となり、且つ、それぞれの前記出力軸の軸間距離が前記ドリブンギアの外径より小さくなるように配置されている
ことを特徴とする請求項1記載のアクチュエータ。 - 前記2つのドライブギアは、
前記ドリブンギアの回転軸心を間に挟むように配置されている
ことを特徴とする請求項2記載のアクチュエータ。 - 前記2つのモータと前記ハイポイド減速機を収容するケースをさらに有する
ことを特徴とする請求項1乃至3のいずれか1項に記載のアクチュエータ。 - 前記出力軸及び前記ドライブギアに同軸に連結された連結シャフトをさらに有し、
前記ケースは、
前記連結シャフトを回転可能に保持する保持部を有する
ことを特徴とする請求項4記載のアクチュエータ。 - 前記ドリブンギアは、
歯部の内周側に凹部を有し、
前記保持部は、
前記ドリブンギアの回転軸心方向から見て前記凹部の内側となる位置で前記連結シャフトを保持する
ことを特徴とする請求項5記載のアクチュエータ。 - 前記保持部に設置され、前記連結シャフトを支持する軸受をさらに有する
を特徴とする請求項5又は6記載のアクチュエータ。 - 前記出力軸の軸方向における前記モータと前記ドライブギアとの間、又は、前記ドライブギアの前記軸方向両側、に配置され、前記ドライブギアに作用する前記軸方向の荷重を支持する複数のアンギュラベアリングをさらに有する
ことを特徴とする1乃至7のいずれか1項に記載のアクチュエータ。 - 前記複数のアンギュラベアリングにより支持された少なくとも1つの連結部材をさらに有し、
前記ドライブギアと前記少なくとも1つの連結部材とは、前記出力軸及び前記ドライブギアと同軸に配置されたボルトにより前記出力軸に連結されている
ことを特徴とする請求項8記載のアクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015240111A JP6331227B2 (ja) | 2015-12-09 | 2015-12-09 | アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015240111A JP6331227B2 (ja) | 2015-12-09 | 2015-12-09 | アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017106533A true JP2017106533A (ja) | 2017-06-15 |
| JP6331227B2 JP6331227B2 (ja) | 2018-05-30 |
Family
ID=59059454
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015240111A Active JP6331227B2 (ja) | 2015-12-09 | 2015-12-09 | アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6331227B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3441643A1 (en) * | 2017-08-08 | 2019-02-13 | Kabushiki Kaisha Yaskawa Denki | Speed reducer and actuator |
| CN110701250A (zh) * | 2019-11-14 | 2020-01-17 | 常熟鑫利茗动力科技有限公司 | 一种多层级多面向准双曲面伞齿轮旋转机构及其使用方法 |
| JP2021065952A (ja) * | 2019-10-21 | 2021-04-30 | 株式会社ジェイテクト | アシスト装置 |
| JP2021094654A (ja) * | 2019-12-17 | 2021-06-24 | パワーアシストインターナショナル株式会社 | 装着型支援ロボット装置 |
| US12042936B2 (en) | 2019-01-23 | 2024-07-23 | Fanuc Corporation | Robot joint structure and robot with backlash reduction mechanism |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0427663A (ja) * | 1990-05-21 | 1992-01-30 | Hitachi Ltd | 電動パワステアリング用減速装置 |
| JP2008049990A (ja) * | 2006-07-26 | 2008-03-06 | Yamaha Marine Co Ltd | 船外機の操舵装置 |
| WO2015087427A1 (ja) * | 2013-12-12 | 2015-06-18 | 株式会社安川電機 | 動作補助装置用アクチュエータ及び動作補助装置 |
-
2015
- 2015-12-09 JP JP2015240111A patent/JP6331227B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0427663A (ja) * | 1990-05-21 | 1992-01-30 | Hitachi Ltd | 電動パワステアリング用減速装置 |
| JP2008049990A (ja) * | 2006-07-26 | 2008-03-06 | Yamaha Marine Co Ltd | 船外機の操舵装置 |
| WO2015087427A1 (ja) * | 2013-12-12 | 2015-06-18 | 株式会社安川電機 | 動作補助装置用アクチュエータ及び動作補助装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3441643A1 (en) * | 2017-08-08 | 2019-02-13 | Kabushiki Kaisha Yaskawa Denki | Speed reducer and actuator |
| CN109386576A (zh) * | 2017-08-08 | 2019-02-26 | 株式会社安川电机 | 减速器和致动器 |
| JP2019032033A (ja) * | 2017-08-08 | 2019-02-28 | 株式会社安川電機 | 減速機及びアクチュエータ |
| US10808803B2 (en) | 2017-08-08 | 2020-10-20 | Kabushiki Kaisha Yaskawa Denki | Speed reducer and actuator |
| US12042936B2 (en) | 2019-01-23 | 2024-07-23 | Fanuc Corporation | Robot joint structure and robot with backlash reduction mechanism |
| JP2021065952A (ja) * | 2019-10-21 | 2021-04-30 | 株式会社ジェイテクト | アシスト装置 |
| JP7415430B2 (ja) | 2019-10-21 | 2024-01-17 | 株式会社ジェイテクト | アシスト装置 |
| CN110701250A (zh) * | 2019-11-14 | 2020-01-17 | 常熟鑫利茗动力科技有限公司 | 一种多层级多面向准双曲面伞齿轮旋转机构及其使用方法 |
| JP2021094654A (ja) * | 2019-12-17 | 2021-06-24 | パワーアシストインターナショナル株式会社 | 装着型支援ロボット装置 |
| JP7401897B2 (ja) | 2019-12-17 | 2023-12-20 | パワーアシストインターナショナル株式会社 | 装着型支援ロボット装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6331227B2 (ja) | 2018-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6331227B2 (ja) | アクチュエータ | |
| KR102597080B1 (ko) | 기어모터 및 협동로봇 | |
| US20120074820A1 (en) | Electromechanical device, actuator using the same, and motor | |
| CN103561919B (zh) | 传动器设备、多轴驱动设备,以及机器人设备 | |
| JP5327312B2 (ja) | ロボットの関節ユニット及びロボット | |
| CN206263958U (zh) | 具有至少一个驱动器的工业机器人 | |
| WO2020078158A1 (zh) | 机器人双关节单元及应用其的足式机器人和协作机械臂 | |
| WO2013018229A1 (ja) | 複合駆動装置及びロボット | |
| CN108247668A (zh) | 一种集成化的机器人关节模组 | |
| CN102049784A (zh) | 工业机器人 | |
| WO2018043398A1 (ja) | 電動機付き波動歯車減速機 | |
| CN106625751B (zh) | 一种自锁型关节并联弹性驱动器 | |
| CN209408531U (zh) | 高度集成的机器人双关节单元及足式机器人和协作机械臂 | |
| US20140084759A1 (en) | Electromechanical device, rotor used for electromechanical device, and mobile unit and robot with electromechanical device | |
| JP6202351B2 (ja) | 動作補助装置用アクチュエータ及び動作補助装置 | |
| CN209755207U (zh) | 一种机械手及机器人 | |
| CN115741769B (zh) | 一种耐高辐照的机械臂关节结构 | |
| CN104117990B (zh) | 一种面向激光精密加工的机器人手腕 | |
| JP6181476B2 (ja) | ロボット用のアーム | |
| CN206998962U (zh) | 机器人关节驱动结构及机器人 | |
| US20250162136A1 (en) | Robot and method for manufacturing robot | |
| CN216399646U (zh) | 一种机械手整体角度调节装置 | |
| CN112388669B (zh) | 一种机器人手臂 | |
| KR102340599B1 (ko) | 중앙단 회전방식 일체형 엑추에이터 | |
| CN119483101A (zh) | 关节执行器及机器人关节 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170915 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170921 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180415 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6331227 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |