JP2017106799A - 合成開口レーダ装置及びそのレーダ信号処理方法 - Google Patents
合成開口レーダ装置及びそのレーダ信号処理方法 Download PDFInfo
- Publication number
- JP2017106799A JP2017106799A JP2015240222A JP2015240222A JP2017106799A JP 2017106799 A JP2017106799 A JP 2017106799A JP 2015240222 A JP2015240222 A JP 2015240222A JP 2015240222 A JP2015240222 A JP 2015240222A JP 2017106799 A JP2017106799 A JP 2017106799A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- target
- moving target
- range
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
Description
図1は第1の実施形態に係る合成開口レーダ装置の構成を示すブロック図である。図1に示すレーダ装置において、アンテナ1は複数のアンテナ素子を配列して大開口アレイを形成してなるフェーズドアレイアンテナである。
第1の実施形態では、移動目標を検出し、その移動目標を高分解能測角して、正確な位置を算出する方式について述べた。本実施形態では、移動目標を検出するために参照信号の探索法を用いる手法について述べる。
第1の実施形態では、移動目標を検出し、その移動目標を高分解能測角して、正確な位置を算出する方式について述べた。本実施形態では、移動目標を検出するためにサブアパチャーに分割する方式について述べる。
(2) このx,yの周囲の所定の範囲の強度をゼロとする。
(3) 以降、極大値が所定の振幅以下になるまで(1)、(2)を繰り返して、極大値となる反射点の振幅値Iamp(m)と位相Iphs(m)とその座標(x,y)(m)(m=1〜M)を得る。
第3の実施形態では、移動目標を検出するためにサブアパチャーに分割し、位相差を検出する手法について述べた。本実施形態では、振幅の移動量を用いて移動目標を検出する手法について述べる。
第1乃至第4の実施形態では、ΣとΔの2chの受信系統が必要である。本実施形態では、コスト低減等によってハードウェア規模を削減するために、1chの受信系統しか装備できない場合に、フライト軸(u軸)上のサンプリング毎に、ΣとΔの2chの切り替えを行う手法について述べる。
Claims (6)
- 移動体に搭載される合成開口(SAR:Synthetic Aperture Radar)レーダ装置において、
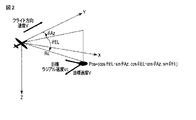
前記移動体の移動方向軸上で、アンテナの実開口をAz面に開口2分割して形成されるΣビームとΔビームを画像化範囲に向けて送受信する送受信手段と、
前記ΣビームとΔビームの送受信によって取得されるΣ信号、Δ信号から固定目標と移動目標を抽出してそれぞれの画像を重畳する信号処理手段と
を具備し、
前記信号処理手段は、
前記Σ信号を周波数領域で圧縮処理して固定目標を含む画像化範囲の全体画像を作成する固定目標処理部と、
前記Σ信号、Δ信号からそれぞれ前記移動方向軸に沿ったN(Nは自然数)点の信号を取得し、前記N点のΣ信号、Δ信号をそれぞれ周波数領域で圧縮処理してレンジ−周波数軸のRD(Range Doppler)信号を生成し、前記RD信号から移動目標を抽出して移動目標のシンボルまたは画像を作成し、抽出した移動目標のレンジ−ドップラセルのΣ信号とΔ信号を用いてモノパルス測角し、その測角値と検出したレンジより前記移動目標の位置を算出する移動目標処理部と、
前記固定目標を含む画像化範囲の全体画像に前記移動目標のシンボルまたは画像を重畳する画像重畳部と
を備える合成開口レーダ装置。 - 前記移動目標処理部は、前記画像化範囲を所定の単位で分割し、各分割単位の領域毎に補正速度及び補正加速度の少なくともいずれか一方の補正信号を用いて前記RD信号を補正し、補正後のRD信号から抽出される移動目標の中で最大振幅となるレンジ−ドップラセルを抽出し、抽出した移動目標について前記モノパルス測角する請求項1の合成開口レーダ装置。
- 前記移動目標処理部は、前記Σ信号を重複を含めてM(Mは2以上の自然数)通りのサブアパチャーに分割し、前記M通りに分割されたサブアパチャー毎にRD画像を生成し、前記M通りのRD画像それぞれから振幅極値を抽出し、前記M通りの振幅極値について最大からP(Pは2以上の自然数)番目まで算出し、それぞれの極値におけるM通りの出力の位相差を横軸にしてヒストグラムを作成し、前記ヒストグラムに示される度数が所定のスレショルドよりも大きい位相差の目標を固定目標と判定し、それ以外を移動目標点として抽出し、抽出した移動目標点のレンジ−ドップラセルのΣ信号とΔ信号を用いてモノパルス測角する請求項1記載の合成開口レーダ装置。
- 前記移動目標処理部は、前記Σ信号を重複を含めてM(Mは2以上の自然数)通りのサブアパチャーに分割し、前記M通りに分割されたサブアパチャー毎にRD画像を生成し、前記M通りのRD画像それぞれから振幅極値を抽出し、前記M通りの振幅極値について最大からP(Pは2以上の自然数)番目まで算出し、それぞれの振幅極値の移動量が所定のスレショルドを超える点を移動目標として抽出し、抽出した移動目標点のレンジ−ドップラセルのΣ信号とΔ信号を用いてモノパルス測角する請求項1記載の合成開口レーダ装置。
- 前記送受信手段は、受信チャンネルが1chの場合に、PRI単位でΣ信号とΔ信号を切り替えて受信し、
前記移動目標処理部は、前記PRI単位で切替入力されるΣ信号、Δ信号をそれぞれ位相中心を一致させて積分し、前記Σ信号の積分数を前記Δ信号に比べて多くして前記Σ信号のドップラ軸のグレーティングローブを抑えて測角する請求項1記載の合成開口レーダ装置。 - 移動体に搭載される合成開口(SAR:Synthetic Aperture Radar)レーダ装置のレーダ信号処理方法において、
前記移動体の移動方向軸上で、アンテナの実開口をAz面に開口2分割して形成されるΣビームとΔビームを画像化範囲に向けて送受信し、
前記ΣビームとΔビームの送受信によって取得されるΣ信号、Δ信号から固定目標と移動目標を抽出してそれぞれの画像を重畳する方法であって、
前記Σ信号を周波数領域で圧縮処理して固定目標を含む画像化範囲の全体画像を作成し、
前記Σ信号、Δ信号からそれぞれ前記移動方向軸に沿ったN(Nは自然数)点の信号を取得し、
前記N点のΣ信号、Δ信号をそれぞれ周波数領域で圧縮処理してレンジ−周波数軸のRD(Range Doppler)信号を生成し、
前記RD信号から移動目標を抽出して移動目標のシンボルまたは画像を作成し、
前記抽出した移動目標のレンジ−ドップラセルのΣ信号とΔ信号を用いてモノパルス測角し、その測角値と検出したレンジより前記移動目標の位置を算出し、
前記固定目標を含む画像化範囲の全体画像に前記移動目標のシンボルまたは画像を重畳する合成開口レーダ装置のレーダ信号処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015240222A JP2017106799A (ja) | 2015-12-09 | 2015-12-09 | 合成開口レーダ装置及びそのレーダ信号処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015240222A JP2017106799A (ja) | 2015-12-09 | 2015-12-09 | 合成開口レーダ装置及びそのレーダ信号処理方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017106799A true JP2017106799A (ja) | 2017-06-15 |
Family
ID=59059605
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015240222A Pending JP2017106799A (ja) | 2015-12-09 | 2015-12-09 | 合成開口レーダ装置及びそのレーダ信号処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017106799A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108802726A (zh) * | 2017-12-29 | 2018-11-13 | 西安电子科技大学 | 基于图形处理器gpu的合成孔径雷达成像方法 |
| CN109800505A (zh) * | 2019-01-21 | 2019-05-24 | 西安交通大学 | 一种星载sar天线空间可展支撑结构装配精度预测方法 |
| JP2022515985A (ja) * | 2018-12-07 | 2022-02-24 | イノエックス ゲーエムベーハー イノヴァツィオーネン ウント アウスリュストゥンゲン フュア ディー エクストルジオーンステヒニク | 被測定物、特にプラスチックプロファイルを測定するための測定システム及び方法 |
| US11275169B2 (en) | 2018-09-03 | 2022-03-15 | Samsung Electronics Co., Ltd. | Method and apparatus for processing radar data |
| CN114240805A (zh) * | 2022-02-24 | 2022-03-25 | 中国科学院空天信息创新研究院 | 一种多角度sar动态成像检测方法及装置 |
| CN115542280A (zh) * | 2022-09-28 | 2022-12-30 | 航天东方红卫星有限公司 | 一种利用二次采样抑制连续波sar泄漏信号的方法及系统 |
| CN118795477A (zh) * | 2024-06-26 | 2024-10-18 | 中国电子科技集团公司第三十八研究所 | 一种目标高度已知的sar动目标一维测角定位方法 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3848253A (en) * | 1966-06-06 | 1974-11-12 | Thomson Csf | Side looking pulse radar system |
| JPH1078481A (ja) * | 1996-09-02 | 1998-03-24 | Mitsubishi Electric Corp | 航空機搭載用レーダ装置 |
| JP2003232852A (ja) * | 2002-02-08 | 2003-08-22 | Mitsubishi Electric Corp | レーダ装置 |
| JP2007078398A (ja) * | 2005-09-12 | 2007-03-29 | Toshiba Corp | 合成開口レーダ画像表示装置 |
| JP2008304321A (ja) * | 2007-06-07 | 2008-12-18 | Toshiba Corp | 追尾装置 |
| JP2009156807A (ja) * | 2007-12-27 | 2009-07-16 | Toshiba Corp | 測角装置 |
| JP2010210337A (ja) * | 2009-03-09 | 2010-09-24 | Mitsubishi Electric Corp | 測角装置 |
| JP2013195189A (ja) * | 2012-03-19 | 2013-09-30 | Toshiba Corp | 目標角度検出装置、目標角度検出方法及び誘導装置 |
| JP2015099097A (ja) * | 2013-11-19 | 2015-05-28 | 株式会社東芝 | 合成開口レーダ装置及びその画像処理方法 |
| JP2015129694A (ja) * | 2014-01-08 | 2015-07-16 | 株式会社東芝 | 合成開口レーダ装置及びその画像処理方法 |
| JP2015129693A (ja) * | 2014-01-08 | 2015-07-16 | 株式会社東芝 | 合成開口レーダ装置及びその画像処理方法 |
-
2015
- 2015-12-09 JP JP2015240222A patent/JP2017106799A/ja active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3848253A (en) * | 1966-06-06 | 1974-11-12 | Thomson Csf | Side looking pulse radar system |
| JPH1078481A (ja) * | 1996-09-02 | 1998-03-24 | Mitsubishi Electric Corp | 航空機搭載用レーダ装置 |
| JP2003232852A (ja) * | 2002-02-08 | 2003-08-22 | Mitsubishi Electric Corp | レーダ装置 |
| JP2007078398A (ja) * | 2005-09-12 | 2007-03-29 | Toshiba Corp | 合成開口レーダ画像表示装置 |
| JP2008304321A (ja) * | 2007-06-07 | 2008-12-18 | Toshiba Corp | 追尾装置 |
| JP2009156807A (ja) * | 2007-12-27 | 2009-07-16 | Toshiba Corp | 測角装置 |
| JP2010210337A (ja) * | 2009-03-09 | 2010-09-24 | Mitsubishi Electric Corp | 測角装置 |
| JP2013195189A (ja) * | 2012-03-19 | 2013-09-30 | Toshiba Corp | 目標角度検出装置、目標角度検出方法及び誘導装置 |
| JP2015099097A (ja) * | 2013-11-19 | 2015-05-28 | 株式会社東芝 | 合成開口レーダ装置及びその画像処理方法 |
| JP2015129694A (ja) * | 2014-01-08 | 2015-07-16 | 株式会社東芝 | 合成開口レーダ装置及びその画像処理方法 |
| JP2015129693A (ja) * | 2014-01-08 | 2015-07-16 | 株式会社東芝 | 合成開口レーダ装置及びその画像処理方法 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108802726A (zh) * | 2017-12-29 | 2018-11-13 | 西安电子科技大学 | 基于图形处理器gpu的合成孔径雷达成像方法 |
| US11275169B2 (en) | 2018-09-03 | 2022-03-15 | Samsung Electronics Co., Ltd. | Method and apparatus for processing radar data |
| JP2022515985A (ja) * | 2018-12-07 | 2022-02-24 | イノエックス ゲーエムベーハー イノヴァツィオーネン ウント アウスリュストゥンゲン フュア ディー エクストルジオーンステヒニク | 被測定物、特にプラスチックプロファイルを測定するための測定システム及び方法 |
| CN109800505A (zh) * | 2019-01-21 | 2019-05-24 | 西安交通大学 | 一种星载sar天线空间可展支撑结构装配精度预测方法 |
| CN114240805A (zh) * | 2022-02-24 | 2022-03-25 | 中国科学院空天信息创新研究院 | 一种多角度sar动态成像检测方法及装置 |
| CN115542280A (zh) * | 2022-09-28 | 2022-12-30 | 航天东方红卫星有限公司 | 一种利用二次采样抑制连续波sar泄漏信号的方法及系统 |
| CN118795477A (zh) * | 2024-06-26 | 2024-10-18 | 中国电子科技集团公司第三十八研究所 | 一种目标高度已知的sar动目标一维测角定位方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017106799A (ja) | 合成開口レーダ装置及びそのレーダ信号処理方法 | |
| JP6271032B2 (ja) | アンテナ諸元推定装置及びレーダ装置 | |
| CN109477892B (zh) | 用于环境检测的车辆雷达 | |
| Zhang et al. | Adaptive two-step calibration for high-resolution and wide-swath SAR imaging | |
| JP6346082B2 (ja) | パルス圧縮レーダ装置及びそのレーダ信号処理方法 | |
| JP6546109B2 (ja) | レーダ装置 | |
| JP6470152B2 (ja) | レーダ装置及びレーダ信号処理方法 | |
| JP2016008852A (ja) | ドップラレーダ装置及びそのレーダ信号処理方法 | |
| JP6629180B2 (ja) | レーダ装置及びそのレーダ信号処理方法 | |
| JP6466263B2 (ja) | レーダ装置及びレーダ信号処理方法 | |
| EP4036602A1 (en) | Radar data processing for vehicle ego-motion estimation | |
| JP2016090431A (ja) | レーダシステム及びそのレーダ信号処理方法 | |
| JP6367143B2 (ja) | 合成開口レーダ装置及びそのレーダ信号処理方法 | |
| JP6612728B2 (ja) | レーダ装置及びそのレーダ信号処理方法 | |
| JP6178244B2 (ja) | 合成開口レーダ装置及びその画像処理方法 | |
| JP2015052549A (ja) | 合成開口レーダ装置及びその画像処理方法 | |
| JP6178222B2 (ja) | 合成開口レーダ装置及びその画像処理方法 | |
| JP2009103510A (ja) | レーダ装置 | |
| JP2020027047A (ja) | レーダシステム及びそのレーダ信号処理方法 | |
| JP6367134B2 (ja) | レーダ装置及びレーダ信号処理方法 | |
| JP6400494B2 (ja) | レーダ装置及びそのレーダ信号処理方法 | |
| JP2001272464A (ja) | レーダ装置 | |
| JP2023001662A (ja) | レーダシステム及びレーダ信号処理方法 | |
| JP6363524B2 (ja) | レーダ装置及びレーダ信号処理方法 | |
| Qian et al. | Motion parameter estimation of multiple ground fast-moving targets with a three-channel synthetic aperture radar |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170911 Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20170911 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190401 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191001 |