JP2017111464A - Mrfデバイス、ジョイスティック装置 - Google Patents
Mrfデバイス、ジョイスティック装置 Download PDFInfo
- Publication number
- JP2017111464A JP2017111464A JP2015242794A JP2015242794A JP2017111464A JP 2017111464 A JP2017111464 A JP 2017111464A JP 2015242794 A JP2015242794 A JP 2015242794A JP 2015242794 A JP2015242794 A JP 2015242794A JP 2017111464 A JP2017111464 A JP 2017111464A
- Authority
- JP
- Japan
- Prior art keywords
- shaft
- yoke
- cylinder
- peripheral surface
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000002093 peripheral effect Effects 0.000 claims abstract description 126
- 239000012530 fluid Substances 0.000 claims abstract description 90
- 230000005291 magnetic effect Effects 0.000 claims abstract description 60
- 238000007789 sealing Methods 0.000 claims description 57
- 239000000696 magnetic material Substances 0.000 abstract description 10
- 238000004891 communication Methods 0.000 description 11
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 7
- 238000001514 detection method Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 239000006249 magnetic particle Substances 0.000 description 5
- 238000005192 partition Methods 0.000 description 4
- 239000007787 solid Substances 0.000 description 4
- 238000012856 packing Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 239000002612 dispersion medium Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005294 ferromagnetic effect Effects 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 230000002572 peristaltic effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 238000005538 encapsulation Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000002105 nanoparticle Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images




Landscapes
- Fluid-Damping Devices (AREA)
- Mechanical Control Devices (AREA)
- Position Input By Displaying (AREA)
Abstract
【課題】簡単な構造でありながら、磁気粘性流体に磁場を印加させた場合に生じる降伏応力抵抗を直接利用して、磁気粘性流体の粘度調整を適切に行うことが可能なMRFデバイス、及びジョイスティック装置を提供する。
【解決手段】磁性体のシリンダ1と、シリンダ1に対して相対移動可能なピストン2とを備えたMRFデバイスXである。ピストン2として、シャフト21と、シャフト21の外径よりも大きい内径を有するコイル22と、シャフト21の径方向Wにおいてシャフト21とコイル22の間に配置され、且つ、シャフト21の軸方向Hにおいてコイル22を挟む位置に配置されたヨーク23とを備えたものを適用し、シャフト21の径方向Wにおけるヨーク突出部234、235の外周面234b、235bとシリンダ1の内周面1aの隙間Sに磁気粘性流体3を配置する。
【選択図】図3
【解決手段】磁性体のシリンダ1と、シリンダ1に対して相対移動可能なピストン2とを備えたMRFデバイスXである。ピストン2として、シャフト21と、シャフト21の外径よりも大きい内径を有するコイル22と、シャフト21の径方向Wにおいてシャフト21とコイル22の間に配置され、且つ、シャフト21の軸方向Hにおいてコイル22を挟む位置に配置されたヨーク23とを備えたものを適用し、シャフト21の径方向Wにおけるヨーク突出部234、235の外周面234b、235bとシリンダ1の内周面1aの隙間Sに磁気粘性流体3を配置する。
【選択図】図3
Description
本発明は、MRF(Magneto Rheological Fluid)デバイス、及びMRFデバイスを備えたジョイスティック装置に関するものである。
鉄(Fe)等の磁性粒子をオイル等の粘性のある分散媒に分散させた流体である磁気粘性流体(Magneto Rheological Fluid:MRF)の特性を利用したジョイスティック装置が知られている(例えば特許文献1)。磁気粘性流体は、磁場の作用がない場合には分散媒中に磁性粒子がランダムに浮遊する一方、外部から磁場を印加されると、磁界の方向に沿って磁性粒子が多数のクラスタを形成し、降伏応力が増大するため、電気信号によってレオロジー特性又は力学的な性質を容易に制御できる材料である。
上記特許文献1に開示されているジョイスティック装置は、操作レバーの所定部位に設けた球体状の揺動基部として、揺動基部が嵌め込まれた球面状の受け部内の空間領域を複数に隔てる隔壁と、隔壁を貫通して空間領域同士を連通する連通孔とを有するものを適用し、操作レバーの操作に連動して揺動基部が回動する球面状の受け部内の空間領域に磁気粘性流体が充填され、コイルによって連通孔内に任意の強さの磁場を与えるように構成されたものである。
このようなジョイスティック装置では、コイルに電流を印加しない状態では、連通孔内に磁場が付与されないため、低粘度の磁気粘性流体が比較的多い流量で連通孔を通過することができ、操作レバーを操作する際の操作抵抗は最も小さくなる一方、コイルに電流を印加した状態では、連通孔内に磁場が付与されるため、連通孔を通過しようとする磁気粘性流体の粘度が電流値に応じて高くなり、連通孔を通過する磁気粘性流体の流量は減少し、操作レバーを操作する際の操作抵抗はコイルに印加される電流値に応じて大きくなる。
上述のジョイスティック装置は、連通孔内に与える磁場の強さ(コイルに印加する電流値)を調整することにより、連通孔を通過する磁気粘性流体の流量を変化させて、操作レバーの操作抵抗をコントロールすることができるものであるが、高い密閉性が要求される揺動基部及び受け部が球状であるため、高難度の加工精度が要求され、また、磁気粘性流体の通路となる連通孔を各隔壁における所定箇所に高い精度で形成する必要があり、構造の複雑化を招来するとともに、揺動力(外部からの操作力)と磁気粘性流体に対する磁界強さの関係が複雑であり、設計や検証に多大な時間を要するものである。さらにまた、上述のジョイスティック装置のように、連通孔を通過する磁気粘性流体の流量を変化させるオリフィス流量制御を必須とする構成は、制御も煩雑である。
本発明は、構造の単純化を図るとともに、このような問題に着目してなされたものであって、主たる目的は、簡単な構造でありながら、磁気粘性流体に磁場を印加させた場合に生じる降伏応力抵抗を直接利用して、磁気粘性流体の粘度調整を適切に行うことが可能なMRFデバイス、及びジョイスティック装置を提供することにある。
すなわち本発明に係るMRFデバイスは、磁性体のシリンダと、シリンダに対して相対移動可能なピストンとを備え、ピストンとして、非磁性体のシャフトと、シャフトの周囲に配置され且つシャフトの外径よりも大きい内径を有するリング状のコイルと、ヨークとを備えたものを適用し、さらに、ヨークは、シャフトの径方向においてシャフトとコイルの間に配置されるヨーク本体と、シャフトの軸方向においてコイルを挟む位置に配置されるヨーク突出部とを有するものであり、少なくともヨーク突出部の外周面とシリンダの内周面との隙間に磁気粘性流体を配置していることを特徴としている。
このような本発明に係るMRFデバイスであれば、コイルを通電状態にすると磁気粘性流体に磁場を加えることができ、コイルの周囲に、ヨーク本体、シャフトの軸方向においてコイルを挟む位置に配置されるヨーク突出部のうち一方のヨーク突出部(例えばシャフトの軸方向を上下方向に一致させた場合において、相対的に上側のヨーク突出部)、磁気粘性流体、磁性体のシリンダ、磁気粘性流体、ヨーク突出部のうち他方のヨーク突出部(例えばシャフトの軸方向を上下方向に一致させた場合において、相対的に下側のヨーク突出部)、ヨーク本体、以上の順で周回する磁路が形成され、コイルの通電状態を停止すればその磁路が消えることになる。なお、本発明では、シャフトを非磁性体に設定していることで、上述の磁路が、シャフトを通過しない磁路となるように設定している。
したがって、本発明に係るMRFデバイスによれば、簡単な構造でありながら、コイルの通電ON・OFFの切り替えやコイルに流す電流量を変化させることによって、シャフトの径方向においてコイルよりも外側に配置した磁気粘性流体に磁場を印加させた場合に生じる降伏応力抵抗を直接利用して、磁気粘性流体の粘度調整を適切に行うことができ、シリンダに対するピストンの移動抵抗あるいはトルクを適宜の変化幅で容易に調整することができる。このように、本発明に係るMRFデバイスであれば、磁気粘性流体の流量制御が要求されず、制御の容易化を図ることが可能である。
また、本発明に係るMRFデバイスであれば、磁気粘性流体を、ピストンの外周面のうち少なくともヨーク突出部の外周面とシリンダの内周面との隙間に充填して配置しているため、ピストンの外周面とシリンダの内周面との隙間全体に磁気粘性流体を充填して配置する態様と比べて、コストアップに直結する磁気粘性流体の使用量増大化を回避して、コストの削減を図ることが可能である。
本発明において、磁気粘性流体の配置領域は、少なくとも、シャフトの軸方向においてコイルを挟む位置に配置されるヨーク突出部のうち一方のヨーク突出部の外周面とシリンダの内周面の隙間(第1の隙間)と、シャフトの軸方向においてコイルを挟む位置に配置されるヨーク突出部のうち他方のヨーク突出部の外周面とシリンダの内周面の隙間(第2の隙間)、以上の2つの隙間であり、これらの隙間同士を適宜の仕切り部材(例えばゴム等の非磁性体)によってシャフトの軸方向に仕切った構成を採用することが可能である。一方、限られたスペースにおいてシャフトの軸方向に沿った磁気粘性流体の配置領域を可能な限り広く確保して、鉄等の磁性粒子の増量化に伴う移動抵抗あるいはトルクの増大化を図るには、シャフトの軸方向においてヨーク突出部の外周面とシリンダとの隙間(第1の隙間、第2の隙間)に連通する密閉リングの外周面とシリンダの内周面との隙間にも磁気粘性流体を連続的に配置する構成を採用することができる。ここで、密閉リングは、シャフトの軸方向に対峙するヨーク突出部同士の隙間を密閉可能な非磁性体のものである。この場合、ヨーク突出部の外周面は、シャフトの径方向においてコイルの外周面よりもシリンダの内周面側に突出した面である。このような構成においてもシャフト及び密閉リングを何れも非磁性体に設定すれば、上述の磁路が、シャフト及び密閉リングを通過しない磁路となる。
また、本発明に係るMRFデバイスでは、シリンダに対して所定のホームポジションから移動したピストンをホームポジションに復帰させる復帰部を備えた構成にすることができる。このような構成であれば、ホームポジションから移動したピストンを手動でホームポジションに戻す処理が要求されず、作業の効率化を図ることができる。
加えて、本発明に係るMRFデバイスにおいて、少なくともシャフト、コイル、及びヨークを同軸上に配置した構成にすれば、MRFデバイス全体のコンパクト化と組み付けの容易化を図ることができる。なお、密閉リングを備えた構成であれば、密閉リングも同軸上に配置してもよい。
さらに、本発明に係るMRFデバイスでは、シリンダに対してピストンを、シャフトの軸方向に沿って直線移動可能に構成したり、シャフトの中心軸回りに回転移動可能に構成したり、あるいは、これら直線移動と回転移動の両方を可能に構成することができる。
また、本発明に係るジョイスティック装置は、上述した構成及び作用効果を奏するMRFデバイスと、シリンダに対してピストンを移動させる操作力を付与可能なハンドルとを備えているため、構造の複雑化を招来することなく、磁場の変化によって操作抵抗を容易に変化させることができる。
このように、ジョイスティック装置にMRFデバイスを実装した構成により、外部からの電気信号に応じて、ジョイスティック装置の操作力(ハンドルの操作抵抗)を変化させることができる。
本発明によれば、ピストンのうち軸方向においてコイルを挟む位置に配置されるヨーク突出部の外周面と、シリンダとの所定隙間に磁気粘性流体を封入状態で配置した簡単な構造でありながら、磁気粘性流体に磁場を印加させた場合に生じる降伏応力抵抗を直接利用して、磁気粘性流体の粘度調整を適切に行うことが可能なMRFデバイスを提供することができるとともに、このようなMRFデバイスを備えて操作力(操作抵抗)を容易に変化させることが可能なジョイスティック装置を提供することができる。このようなジョイスティック装置では、特許文献1記載のジョイスティック装置と比較して、磁気粘性流体の封入や制御を容易なものとすることができ、磁気粘性流体に使用量を低減することもできることから、低コストで磁気粘性流体を用いたジョイスティック装置を実現することができる。
以下、本発明の一実施形態を、図面を参照して説明する。
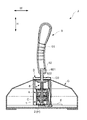
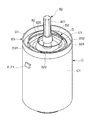
本実施形態に係るMRFデバイスXは、例えば図1に示すジョイスティック装置Jの一部を構成するものであり、図2に示すように、シリンダ1と、シリンダ1に対して相対移動可能なピストン2と、シリンダ1の内周面1aとピストン2の外周面との隙間のうち後述する所定の隙間に充填した磁気粘性流体3(MRF3)とを備え、ピストン2の一部を構成するコイル22に対する通電状態をON・OFFの間で切り替えたり、コイル22に流す電流値を変化させることによって、磁気粘性流体3の粘性を変化させ、シリンダ1に対するピストン2の移動抵抗を調整することが可能なものである。
シリンダ1は、図2に示すように、磁性材料から形成され、中空の内部空間を有する円筒状のものである。本実施形態のデバイスは、シリンダ1の上方開口部を蓋封可能な上蓋11と、シリンダ1の下方開口部を蓋封可能な下蓋12とを備えている。上蓋11及び下蓋12は、それぞれ後述するピストン2のシャフト21が挿通可能なシャフト挿通孔を中心部に有するリング状のものである。
ピストン2は、図2に示すように、非磁性体のシャフト21と、シャフト21の周囲に配置されたコイル22と、ヨーク23とを備えている。
シャフト21は、円柱状をなすシャフト本体211を有するものであり、本実施形態では、シャフト本体211の上端部から上方に向かって延伸する上方延伸部212の外径、及びシャフト本体211の下端部から下方に向かって延伸する下方延伸部213の外径を、シャフト本体211の外径よりも小さく設定している。本実施形態では、上蓋11の下向き面に固定した上側軸受13と、下蓋12の上向き面に固定した下側軸受14によって、シャフト21を回転可能且つ軸方向H(高さ方向)に進退移動可能に支持している。
コイル22は、図2及び図3(図3は、図2において一点鎖線で囲むQ領域の拡大図である)に示すように、コイル本体221(コイル巻き線部)と、コイル本体221を保持するコイルホルダ222(ボビン)とを備え、シャフト21の外径よりも大きい内径に設定されたリング状の形態を有するものである。
ヨーク23は、シャフト21の径方向Wにおいてシャフト21とコイル22の間に配置されるヨーク本体230と、シャフト21の軸方向Hにおいてコイル22を挟む位置に配置されたヨーク突出部234,235とを有するものである。ヨーク23全体の内径は、シャフト21の外径(具体的にはシャフト本体211の外径)よりもごく僅かに大きく設定され、ヨーク23の内周面23aがシャフト21の外周面21b(具体的にはシャフト本体211の外周面)に略隙間無く接している(図3参照)。本実施形態では、上ヨーク231と下ヨーク232の2パーツからなるヨーク23を適用し、これら上ヨーク231及び下ヨーク232によってコイル22をシャフト21の軸方向Hに挟むように構成している。また、上ヨーク231及び下ヨーク232のうち下ヨーク232の所定部分230が、シャフト21の径方向Wにおいてシャフト21とコイル22の間に配置されるように構成している。すなわち、本実施形態では、下ヨーク232のうちシャフト21の径方向Wにおいてシャフト21とコイル22の間に配置される部分230によってヨーク本体230を構成している。また、以下の説明では、シャフト21の軸方向Hにおいてコイル22を挟む位置に配置されたヨーク突出部234,235のうち、相対的に上側のヨーク突出部234を「上ヨーク突出部234」とし、相対的に下側のヨーク突出部235を「下ヨーク突出部235」とする。ヨーク23は、非磁性体の止めピンPによってシャフト21に固定されている。止めピンPは、図2に示すように、シャフト21の軸方向Hに直交する水平姿勢で配置され、シャフト21に形成したピン挿通孔と、下ヨーク232の所定部分(ヨーク本体230)に形成したピン挿通孔に嵌入している。また、本実施形態のMRFデバイスXは、図2に示すように、コイル22に電流を流す配線を配置する配線用凹部236をヨーク23に形成するとともに、止めピンPの一部に、配線用凹部236に連通する配線挿通孔を形成し、これら配線用凹部236及び配線挿通孔を利用して配線処理を施している。
本実施形態では、ヨーク23のうち上ヨーク突出部234の外周面234b及び下ヨーク突出部235の外周面235bを、シャフト21の径方向Wにおいてコイル22の外周面22bよりも径方向Wにおいて外側(シリンダ1の内周面1a側)に突出させている(図3参照)。そして、本実施形態のピストン2は、シャフト21の軸方向Hに対峙するヨーク突出部(上ヨーク突出部234、下ヨーク突出部235)同士の隙間を密閉可能な密閉リング4をさらに備えている(図2及び図3参照)。
密閉リング4は、内径をコイル22の外径よりも所定寸法大きく設定した非磁性体である。密閉リング4の高さ寸法(シャフト21の軸方向Hに沿った寸法と同義)は、コイル22の高さ寸法と同じであり、高さ方向に対峙するヨーク突出部(上ヨーク突出部234、下ヨーク突出部235)同士の隙間の高さ寸法にも一致する。また、本実施形態では、図3に示すように、密閉リング4の外径を、ヨーク23のうちヨーク突出部(上ヨーク突出部234、下ヨーク突出部235)の外径と同一または略同一に設定し、密閉リング4の外周面4bと、ヨーク23のうちヨーク突出部(上ヨーク突出部234、下ヨーク突出部235)の外周面234b,235bが相互に連続する面になるように構成している。本実施形態のMRFデバイスXでは、ピストン2の外周面のうち、密閉リング4の外周面4b、及びヨーク突出部(上ヨーク突出部234、下ヨーク突出部235)の外周面234b,235bで構成される面と、シリンダ1の内周面1aとの間に、所定寸法の隙間Sが形成されるように設定している(図3参照)。
本実施形態のMRFデバイスXは、ヨーク23のうちヨーク突出部(上ヨーク突出部234、下ヨーク突出部235)とは異なる部分に、シリンダ1の内周面1aに密着可能なリング状の密閉シール部(上密閉シール部51、下密閉シール部52)が配置可能な凹部237を形成している(図2及び図3参照)。本実施形態では、上ヨーク231のうち上ヨーク突出部234よりも上方の部分と、下ヨーク232のうち下ヨーク突出部235よりも下方の部分にそれぞれ凹部237を形成し、各凹部237に、弾性を有する密閉シール部(上密閉シール部51、下密閉シール部52)を配置している。そして、各凹部237とシリンダの内周面1との隙間に密閉シール部(上密閉シール部51、下密閉シール部52)を圧入した状態では、密閉シール部(上密閉シール部51、下密閉シール部52)の外向き面51b,52bがシリンダ1の内周面1aに密着している(図3参照)。また、相対的に上側の凹部236(上ヨーク231の凹部236)に配置した密閉シール部(上密閉シール部51)の上向き面が、ヨーク23の上向き面(具体的には上ヨーク231の上向き面)と略面一になるとともに、相対的に下側の凹部236(下ヨーク232の凹部236)に配置した密閉シール部(下密閉シール部52)の下向き面が、ヨーク23の下向き面(具体的には下ヨーク232の下向き面)と略面一になるように設定している。本実施形態では、上密閉シール部51及び下密閉シール部52として、全体形状がリング状をなし、断面形状がV字状またはY字状のパッキンを適用している。
本実施形態のMRFデバイスXは、ヨーク23の上向き面を上方から被覆するリング状の上カバー61と、ヨーク23の下向き面を下方から被覆するリング状の下カバー62を備えている(図2参照)。上カバー61及び下カバー62は、何れも非磁性体である。上カバー61及び下カバー62の外径は、シリンダ1の内径よりも僅かに小さく設定され、上カバー61及び下カバー62の外周面61b,62bがシリンダ1の内周面1aに対して僅かな隙間を介して対面するように構成している(図2及び図3参照)。したがって、上カバー61は、ヨーク23の上向き面のみならず、上密閉シール部51の上向き面も上方から被覆し、下カバー62は、ヨーク23の下向き面のみならず、下密閉シール部52の下向き面も下方から被覆している。なお、本実施形態では、図2及び図9に示すように、上カバー61及び下カバー62をそれぞれ個別のボルト63,64によってヨーク23に連結している。特に、ヨーク23を上ヨーク231及び下ヨーク232の2パーツで構成している本実施形態においては、上カバー61をヨーク23に連結するボルト63によって、上ヨーク231及び下ヨーク232を連結している(図9参照)。上カバー61は、上密閉シール部51及び上ヨーク231を上方から押圧する機能を発揮し、下カバー62は、下密閉シール部52及び下ヨーク232を下方から押圧する機能を発揮する。本実施形態では、上密閉シール部51及び下密閉シール部52としてパッキンを適用しており、上カバー61及び下カバー62は、パッキン止めとして機能している。
本実施形態のピストン2は、シャフト21、コイル22、ヨーク23(上ヨーク231、下ヨーク232)、密閉リング4、上密閉シール部51、下密閉シール部52、上カバー61、及び下カバー62を同軸上に配置している。ピストン2の外周面は、高さ方向に沿って上方から並ぶ以下の各パーツの外周面、つまり、上カバー61の外周面61b、上密閉シール部51の外周面51b、上ヨーク突出部234の外周面234b、密閉リング4の外周面4b、下ヨーク突出部235の外周面235b、下密閉シール部52の外周面52b、下カバー62の外周面62b、これらの外周面によって形成される。このようなピストン2をシリンダ1の内部空間に収容した状態において、ピストン2の外周面のうち、上密閉シール部51及び下密閉シール部52によって形成される外周面は、各密閉シール部(上密閉シール部51、下密閉シール部52)の弾性変形によってシリンダ1の内周面1aに隙間無く密着している。一方、図3に示すように、ピストン2の外周面のうち、シリンダ1に密着している上密閉シール部51及び下密閉シール部52同士の間である上ヨーク突出部234の外周面234b、密閉リング4の外周面4b、及び下ヨーク突出部235の外周面235bは、所定寸法の隙間Sを介してシリンダ1の内周面1aに対面している。
そして、本実施形態に係るMRFデバイスXは、ピストン2の外周面とシリンダ1の内周面1aとの隙間であって且つ上密閉シール部51及び下密閉シール部52によって高さ方向に仕切られた隙間Sに、磁気粘性流体3(MRF)を充填している。図3では、磁気粘性流体3の配置領域を所定のパターンを付して示している。なお、図1、図2、図6及び図9では、磁気粘性流体3の配置領域に所定のパターンを付していない。
ここで、磁気粘性流体3は、ナノサイズ以上の強磁性粒子(磁気鉄粉,カルボニル鉄)をキャリア液体(オイル)内で分散させ、磁場の無い状態では粘度が非常に低い流体(ニュートン流体,自由流体)であるが、外部から磁場が加えられると、強磁性粒子が鎖状にクラスタ形成され、磁場の大きさにより剪断応力が変化する粘度の高い流体(ビンガム流体,半固体化した流体)としての性質を有する流体である。このように、磁気粘性流体3は、磁場印加によって自由流体から半固体状態に変化した流体(半固体化した流体)が降伏応力を持つため、磁性流体に比べて剪断力変化幅を格段に大きく取れる特性を有し、印加磁場を変化させることで自由液体から半固体状態まで可逆的に瞬時に変化させることができる機能性流体である。
このような構成を有する本実施形態のMRFデバイスXでは、コイル22に電流を流していない状態(通電OFF状態)であれば、磁気粘性流体3が粘度の非常に低い流体であることによって、固定台であるシリンダ1に対してピストン2が、シャフト21の軸方向H(高さ方向)に沿って進退移動可能であり、且つシャフト21を軸中心として回転可能である。本実施形態のMRFデバイスXにおけるシャフト21は、ピストン2を構成するパーツである。したがって、本実施形態のMRFデバイスXでは、シャフト21を含むピストン2全体がシリンダ1に対して相対移動(直動、回転)する。なお、本実施形態のMRFデバイスXは、弾性変形させた上密閉シール部51及び下密閉シール部52をシリンダ1の内周面1aに密着させているため、通電OFF状態においてもシリンダ1に対するピストン2の相対移動時には、シリンダ1の内周面1aに対する上密閉シール部51及び下密閉シール部52の密着部分(摺動面)が摺動抵抗となって作用する。
そして、本実施形態のMRFデバイスXは、コイル22に電流を流すと、図2に示すように、コイル22回りに、上ヨーク231及び下ヨーク232(ヨーク本体230)、下ヨーク突出部235、磁気粘性流体3、磁性体のシリンダ1、磁気粘性流体3、上ヨーク突出部234、上ヨーク231及び下ヨーク232(ヨーク本体230)、これらをこの順で辿る磁路(同図では相対的に太い点線で磁路を示し、磁力方向を矢印で示す)が形成され、磁気粘性流体3の粘度が大きくなり、シリンダ1に対するピストン2の相対移動時の抵抗を急激に大きくすることが可能である。このように、本実施形態のMRFデバイスXは、コイル通電OFF状態とコイル通電ON状態との間で切り替えて、磁気粘性流体3に磁場を加えたり、磁場を停止することによって、磁気粘性流体3の粘性を急激に変化させることができるとともに、コイル22に対する通電量を調整することによって、磁気粘性流体3の粘性を調整することができる。なお、本実施形態では、シャフト21、止めピンP、上密閉シール部51、下密閉シール部52、及び密閉リング4を何れも非磁性体に設定し、これらのパーツを辿る磁路が形成されないように構成している。
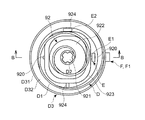
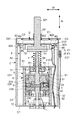
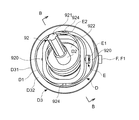
本実施形態に係るMRFデバイスXは、図1、図4乃至図6(図4は、ジョイスティック装置Jの一部を省略して示す斜視図であり、図5は図4に示すジョイスティック装置Jの平面図であり、図6は図5のB−B線断面図である)に示すように、シリンダ1に対して所定のホームポジション(H)から移動したピストン2をホームポジション(H)に復帰させる復帰部7(ピストン復帰部7)を備えている。本実施形態では、図1、図2及び図6に示すピストン2の位置をホームポジション(H)に設定している。ホームポジション(H)に位置付けたピストン2は、シャフト21の軸方向Hが鉛直方向に一致または略一致し、且つシリンダ1よりも上方に突出しているシャフト21の長さ(シャフト上方突出量)がシャフト21の実可動領域として想定している範囲内において最長または略最長となる(図9参照)。
復帰部7は、シャフト21のうち、ピストン2をホームポジション(H)に位置付けた状態においてシリンダ1よりも上方に突出している部分の周囲に配置され、且つシャフト21の軸方向Hに伸縮可能な弾性体であるコイルバネ71を用いて構成したものである。本実施形態では、シリンダ1の上方に上蓋11を介して有底筒状のカップ8を配置し、カップ8の底壁81と、シャフト21の上端(先端)に設けた円盤状のバネストッパ72との間にコイルバネ71を配置している。そして、ピストン2全体をホームポジション(H)よりも下方へ移動させる操作力が付与されると、コイルバネ71が収縮し(図9参照)、その操作力が解除された場合には、コイルバネ71が弾性復元力によって伸張し、ピストン2全体が上方へ移動してホームポジション(H)に復帰する。
本実施形態に係るジョイスティック装置Jは、図1に示すように、上述の構成を有するMRFデバイスXと、シリンダ1に対してピストン2を移動させる操作力を付与可能なハンドル9とを備えている。
ハンドル9は、オペレータが把持可能なスティック状のハンドル本体91と、ハンドル本体91の基端部(下端部)に設けたハンドル基部92とを備えている。本実施形態では、図6に示すように、ハンドル基部92として、軸部921と、軸部921の下端に設けた円盤状の鍔部922とを有するものを適用している。本実施形態のジョイスティック装置Jは、図4乃至図6に示すように、鍔部922に設けた第1傾動軸920を中心にハンドル基部92全体を傾動可能に支持する傾動支持部923(ジンバル)と、傾動支持部923を、鍔部922の傾動中心である第1傾動軸920と同一平面上において互いに直角に配置された第2傾動軸924の軸回りに傾動可能に支持する上述のカップ8とを備え、このような2軸ジンバル構造によってハンドル9を全方位に傾動(揺動)可能に構成している。すなわち、本実施形態に係るジョイスティック装置Jは、ハンドル9(スティック)の傾動に追従する2軸ジンバル機構を備えている。
このような構成により、本実施形態に係るジョイスティック装置Jは、図1に示す直立姿勢にあるハンドル9を、基端部(ハンドル基部92)を中心に全方向に搖動させることが可能である。
カップ8は、図4乃至図6に示すように、MRFデバイスXのうち上蓋11の上向き面に載置され、カップ8の底壁81と上蓋11との間に配置した回転支持ボールR1によって、シリンダ1に対して鉛直軸回りに回転可能に支持されている。本実施形態のカップ8は、リング状の底壁81と、底壁81の外周縁から上方に延伸する周壁82と、周壁82の上端から径方向W外側に突出するフランジ部83とを備えている(図6参照)。カップ8の底壁81には、シャフト21が嵌合可能なシャフト嵌合孔84を形成している。そして、カップ8全体の回転に伴って、シャフト嵌合孔84に嵌合したシャフト21も同一方向に回転(一体回転)するように設定している。したがって、カップ8全体の回転に伴って、シャフト21を含むピストン2全体が同一方向に回転(一体回転)する。本実施形態では、シャフト21のうちシャフト嵌合孔84に嵌合する部分の断面形状及びシャフト嵌合孔84の開口形状をD字状に設定している。また、周壁82の上端部近傍に、上述の傾動支持部923(ジンバル)の傾動軸924を傾動可能に支持する傾動支持孔85を形成している(図6参照)。
本実施形態のジョイスティック装置Jは、図4乃至図6に示すように、MRFデバイスX及びカップ8を内部空間に収容可能なケースCを備えている。ケースCは、円盤状の底壁C1と、底壁C1の外周縁から上方に延伸する周壁C2と、周壁C2の上端から径方向W内側に突出させた内方突出部C3とを備えている。内方突出部C3は、カップ8のフランジ部83を上方から被覆する位置に配置され、内方突出部C3とフランジ部83との間に配置した回転支持ボールR2によって、ケースCに対するカップ8の回転移動を可能にしている(図6参照)。
本実施形態のジョイスティック装置Jは、図1、図4乃至図9(図7は、ハンドル9をある角度まで揺動させたジョイスティック装置Jの一部を省略して示す斜視図であり、図8は図7に示すジョイスティック装置Jの平面図であり、図9は図8のB−B線断面図である)に示すように、所定の基準姿勢から傾動したハンドル9のハンドル基部92を基準姿勢に復帰させるハンドル復帰部Dを備えている。ハンドル復帰部Dは、ハンドル基部92の軸部921の周囲に配置した渦巻状のバネD1(渦巻バネ)を用いて構成したものである。本実施形態では、ハンドル基部92の軸部921にブッシュD2を相対回転不能な状態で取り付け、このブッシュD2に、渦巻バネD1の一端部(渦巻バネD1の中心に近い方の端部)を巻き付けて固定している。また、本実施形態のジョイスティック装置Jは、ケースCの上方にバネストッパD3を配置し、バネストッパD3の周壁D31に渦巻バネD1の他端部(渦巻バネD1の中心から遠い方の端部)及び他端部近傍領域を接触させた状態で固定している(図5及び図8参照)。このバネストッパD3は、図6及び図7等に示すように、高さ方向HにおいてケースCの周壁C2に連続する位置に配置される周壁D31と、周壁D31の下端から径方向W内側に突出させた内方突出部D32とを備え、内方突出部D32をケースCの内方突出部C3cに重ねた状態で適宜の処理によって固定したものである。本実施形態では、ハンドル基部92の軸方向Hが鉛直方向と一致または略一致する姿勢(直立姿勢)を「基準姿勢」に設定し、ユーザによるハンドル9への操作力が付与されていない状態では、渦巻バネD1によってハンドル基部92を基準姿勢に維持できるように構成している。
ハンドル基部92(搖動基部)が基準姿勢にある場合におけるハンドル9全体の姿勢を「操作初期姿勢」とすると、操作初期姿勢にあるハンドル9は全体として直立姿勢にある。そして、ユーザがハンドル本体91を把持した状態でハンドル9に操作力を付与すると、ハンドル9全体が操作初期姿勢から揺動し、直立した基準姿勢にあったハンドル基部92も搖動する(図7乃至図9参照)。その結果、シャフト21の上端が連結されているバネストッパ72がハンドル基部92の揺動動作に伴って下方に押圧されて、シャフト21を含むピストン2全体がシリンダ1に対してホームポジション(H)よりも下方へ移動する。ハンドル基部92の搖動角度が大きいほどピストン2全体の下方への移動距離は長くなる。ピストン2全体の下方への移動に伴って、バネストッパ72とシリンダ1の間に配置している復帰部7(コイルバネ71)が高さ方向Hに収縮するように弾性変形し、この復帰部7の復元力(コイルバネ71の付勢力)がバネストッパ72、ひいてはハンドル9全体に作用する。また、ハンドル基部92の軸部921の周囲に配置した渦巻バネD1は、ハンドル基部92の揺動・回転に伴って弾性変形し、この渦巻バネD1の復元力(付勢力)がハンドル基部92、ひいてはハンドル9全体に作用する。
そして、本実施形態のジョイスティック装置Jは、ハンドル9に対する操作力を停止すると、バネストッパ72とシリンダ1の間において収縮変形している復帰部7(コイルバネ71)の弾性復元力によって、ピストン2をホームポジション(H)に自動復帰させることができるとともに、ハンドル基部92の軸部921の周囲において弾性変形している渦巻バネD1の弾性復元力によって、ハンドル基部92を基準姿勢に自動復帰させることができる。その結果、ハンドル9全体は図1に示す操作初期姿勢に自動復帰する。本実施形態では、図6に示すように、ピストン2がホームポジション(H)に位置付けられている場合に、ハンドル9のハンドル基部92は基準姿勢になり、ハンドル基部92の鍔部922の下向き面とバネストッパ72の上向き面が面接触するように設定している。
また、本実施形態に係るジョイスティック装置Jは、図5及び図6に示すように、ハンドル9の揺動角度を検出可能なハンドル揺動角度検出部Eと、ハンドル9の回転角度を検出可能なハンドル回転角度検出部Fとを備えている。
ハンドル揺動角度検出部Eは、ハンドル本体91の揺動に同期して揺動するハンドル基部92又は傾動支持部923(ジンバル)の傾動角度を検出可能なものである。本実施形態では、互いに直交する方向に配置された2つの位置センサであるX軸センサE1E1とY軸センサE2を用いてハンドル搖動角度検出部Eを構成している。本実施形態のジョイスティック装置Jは、ハンドル搖動角度検出部Eを構成するX軸センサE1及びY軸センサE2を、ハンドル基部92や傾動支持部923(ジンバル)またはそれらの周辺パーツの適宜箇所に取り付けている。本実施形態では、X軸センサE1及びY軸センサE2として接触型センサを適用している。
ハンドル回転角度検出部Fは、ハンドル9の回転に同期して回転(一体回転)するカップ8の回転角度を検出可能な回転センサF1を用いて構成したものである。本実施形態では、ケースCのうちカップ8の高さ位置に応じた適宜箇所に、非接触型センサである回転センサF1を取り付けている(図6参照)。回転センサF1は、ケースCの周壁C2の所定箇所に形成した窓孔C21を通じてカップ8の回転をセンシング可能な位置に設けられている。
また、本実施形態に係るジョイスティック装置Jは、図1に示すように、MRFデバイスXを収容したケースC全体を内部空間に収容可能な外ケースGを備え、外ケースGの内部空間に、ハンドル搖動角度検出部E及びハンドル回転角度検出部Fによる検出結果に応じてコイル22に流す電流量(電流値、電圧)を制御可能な制御部K(制御基板)を配置している。
以上の構成を有する本実施形態に係るジョイスティック装置Jは、ハンドル9よりも下方に配置したMRFデバイスXにより、コイル22に電流を印加しない状態では、コイル22回りに磁場が形成されないため、磁気粘性流体3の粘度は極めて低く、ハンドル9を操作する際の操作抵抗は最も小さくなる。一方、コイル22に電流を印加した状態では、磁気粘性流体3の粘度が電流値に応じて高くなり、ハンドル9を操作する際の操作抵抗はコイル22に印加される電流値に応じて大きくなる。このように、本実施形態に係るジョイスティック装置Jは、磁場の変化によってシリンダ1に対するピストン2の相対移動時の抵抗力を変化させて、ハンドル9に作用するトルク(操作抵抗)を変化させることが可能である。特に、本実施形態に係るジョイスティック装置Jは、ハンドル9の全方向における搖動動作の操作力(操作抵抗)を変化させることができる。また、本実施形態に係るジョイスティック装置Jは、一定角度範囲内におけるハンドル9の回転動作の操作力(操作抵抗)を変化させることができる。
このような本実施形態に係るジョイスティック装置Jを用いて、例えばガントリークレーンのトロリ(図示省略)を操作する際には、コイル通電OFF状態からコイル通電ON状態に切り替えた状態で、オペレータが、トロリを進行させたい方向にハンドル9を倒す操作力をハンドル9に付与する。すると、本実施形態に係るジョイスティック装置Jの制御部Kは、ハンドル搖動角度検出部E及びハンドル回転角度検出部Fによって、ハンドル9の搖動角度及び回転角度を検知し、トロリの荷重、トロリの走行速度、外部風速、及びトロリの揺れに応じて、コイル22に流す電流値(電圧値)を自動で変化させることで、磁気粘性流体3の粘度を変化させ、ハンドル9に作用するトルク(操作抵抗)を変化させる。そして、トロリが所定の搬送目的地に近付くと、本実施形態に係るジョイスティック装置Jの制御部Kは、搬送目的までの距離に応じて、コイル22に流す電流値(電圧値)を漸次または急激に大きくすることで、ハンドル9に作用するトルク(操作抵抗)を大きくする。このように操作抵抗力が大きくなることで、ユーザは、トロリが所定の搬送目的地に近付いていることを感覚的に容易に把握することができる。なお、トロリの走行開始時点から搬送目的地に所定距離まで近付くまでの間において変化させるコイル22に流す電流値(通常電流値)とは別に、搬送目的地に所定距離まで近付いた時点で、それまでの電流値(通常電流値)に加える電流値(一時付加電流値)を予め設定しておくことで、電流制御の容易化を図ることも可能である。
このように、本実施形態に係るジョイスティック装置Jに適用したMRFデバイスXは、磁性体のシリンダ1と、シリンダ1に対して相対移動可能なピストン2とを備え、ピストン2として、非磁性体のシャフト21と、シャフト21の周囲に配置され且つシャフト21の外径よりも大きい内径を有するリング状のコイル22と、シャフト21の径方向Wにおいてシャフト21とコイル22の間に配置され且つシャフト21の軸方向Hにおいてコイル22を挟む位置に配置されたヨーク23(上ヨーク231、下ヨーク232)とを備えたものを適用し、少なくともシャフト21の径方向Wにおけるヨーク突出部(上ヨーク突出部234、下ヨーク突出部235)の外周面234b,235bとシリンダ1の内周面1aとの隙間Sに磁気粘性流体3を配置した構成である。
このような本実施形態に係るMRFデバイスXによれば、コイル22を通電状態にすると磁気粘性流体3に磁場を加えることができ、シャフト21の軸方向Hに沿った断面視においてコイル22を周回する磁路(上ヨーク231及び下ヨーク232(ヨーク本体230)、下ヨーク突出部235、磁気粘性流体3、磁性体のシリンダ1、磁気粘性流体3、上ヨーク突出部234、上ヨーク231及び下ヨーク232(ヨーク本体230)、以上の順で巡廻する磁路)が形成され、コイル22の通電状態を停止すればその磁路が消える。したがって、簡単な構造でありながら、コイル22の通電ON・OFFの切り替えやコイル22に流す電流量を変化させることによって、シャフト21の径方向Wにおいてコイル22よりも外側に配置した磁気粘性流体3に磁場を印加させた場合に生じる降伏応力抵抗を直接利用して、磁気粘性流体3の粘度調整を適切に行うことができ、シリンダ1に対するピストン2の移動抵抗(トルク)を、例えば急激に大きくする等、適宜の変化幅で調整することができる。また、本実施形態に係るMRFデバイスXによれば、磁気粘性流体3を、ピストン2の外周面のうち少なくともヨーク突出部234,235の外周面234b,235bとシリンダ1の内周面1aとの隙間Sに充填して配置しているため、ピストン2の外周面とシリンダ1の内周面1aとの隙間全体に磁気粘性流体3を充填して配置する態様と比較して、コストの掛かる磁気粘性流体3の使用量を低減することができ、コストの削減を図ることが可能であるとともに、磁気粘性流体3の流量制御が要求されないため、制御の容易化を図ることもできる。
特に、本実施形態に係るMRFデバイスXは、ヨーク23(上ヨーク231、下ヨーク232)のうち径方向Wにおいてコイル22の外周面22bよりも突出してシャフト21の軸方向Hに対峙するヨーク突出部(上ヨーク突出部234、下ヨーク突出部235)同士の隙間を密閉可能な非磁性体の密閉リング4を備え、磁気粘性流体3を、シャフト21の軸方向Hにおいてヨーク突出部234,235とシリンダ1との隙間に連通する密閉リング4の外周面4bとシリンダ1の内周面1aとの隙間にも連続的に配置しているため、限られたスペースの中で軸方向Hに沿った磁気粘性流体3の配置領域Sを可能な限り広く確保して、鉄等の磁性粒子の増量化に伴う移動抵抗あるいはトルクの増大化を図ることができる。
本実施形態では、シャフト21の軸方向Hに沿った磁気粘性流体3の配置領域Sを、シリンダ1の内周面1aに密着する上密閉シール部51と下密閉シール部52とによって規定しているため、磁気粘性流体3の配置領域Sにおける磁気粘性流体3の適切な封入状態を維持することが可能である。
また、本実施形態に係るMRFデバイスXは、シリンダ1に対して所定のホームポジション(H)から移動したピストン2をホームポジション(H)に復帰させる復帰部7を備えているため、ホームポジション(H)から移動したピストン2を手動でホームポジション(H)に戻す処理が要求されず、使い勝手に優れている。
加えて、本実施形態に係るMRFデバイスXによれば、シャフト21、コイル22、ヨーク23(上ヨーク231、下ヨーク232)、及び密閉リング4を同軸上に配置しているため、構造の簡素化及びコンパクト化を図ることができる。
さらに、本実施形態に係るMRFデバイスXによれば、シリンダ1に対してピストン2がシャフト21の軸方向Hに沿って直線移動したり、シャフト21回りに回転移動することができるため、汎用性に優れている。
また、本実施形態に係るジョイスティック装置Jは、上述した構成及び作用効果を奏するMRFデバイスXと、シリンダ1に対してピストン2を移動させる操作力を付与可能なハンドル9とを備えているため、構造の複雑化を招来することなく、磁場の変化によって操作抵抗を容易に変化させることができる。
このように、本実施形態に係るMRFデバイスX及びジョイスティック装置Jは、磁力により磁気粘性流体の粘度を変化させて移動抵抗あるいはトルクを発生させ、発生した移動抵抗あるいはトルクの変化を、ピストン2の一部を構成するコイル22の電流値(電圧)によって容易にコントロールすることができるとともに、摩擦力ではなく、磁力によって移動抵抗あるいはトルクを発生させる構成であるため、騒音の低減化及び長寿命化をも図ることができる。
なお、本発明は上述した実施形態に限定されるものではない。例えば、上述した実施形態のMRFデバイスXは、磁気粘性流体3を、シャフト21の軸方向Hに連通する以下の隙間、「上ヨーク突出部234の突出端面(外周面234b)とシリンダ1の内周面1aとの隙間」、「密閉リング4の外周面4bとシリンダ1の内周面1aとの隙間」、「下ヨーク突出部235の突出端面(外周面235b)とシリンダ1の内周面1aの隙間」、これらの隙間全てに磁気粘性流体3を連続的に配置した構成を例示したが、「上ヨーク突出部234の突出端面(外周面234b)とシリンダ1の内周面1aとの隙間(第1の隙間)」、及び「下ヨーク突出部235の突出端面(外周面235b)との隙間(第2の隙間)」を相互に隔てた空間に設定し、これらの隙間(第1の隙間、第2の隙間)にのみ磁気粘性流体を配置した構成を採用することが可能である。
このようにすれば、コイル通電状態においてコイルを周回する磁路を形成される構成を確保しつつ、磁気粘性流体の使用量を低減して、コストの削減を図ることができる。なお、第1の隙間と第2の隙間を相互に隔離された空間にするためには、別のパーツによって密閉リングの外周面とシリンダの内周面との隙間を埋めるように構成したり、密閉リング自体の外径を上述の実施形態の外径よりも大きく設定して密閉リングの外周面とシリンダの内周面との隙間を埋めるように構成すればよい。
なお、本発明では、密閉リングを備えていない構成を採用することも可能である。この場合、コイルの外周面が密閉リングを介さずにシリンダの内周面に対向する構成になる。そして、コイルの外周面とシリンダの内周面との隙間に磁気粘性流体を配置するか否かは適宜選択することができる。コイルの外周面とシリンダの内周面との隙間に磁気粘性流体を配置した場合であってもコイルの機能的には問題にならない。また、コイルの外周面とシリンダの内周面との隙間に磁気粘性流体を配置しない場合であれば、「上ヨーク突出部234の突出端面(外周面234b)とシリンダ1の内周面1aとの隙間(第1の隙間)」、及び「下ヨーク突出部235の突出端面(外周面235b)との隙間(第2の隙間)」を相互に隔てた空間に設定し、これらの隙間(第1の隙間、第2の隙間)にのみ磁気粘性流体を配置した構成を採用することが可能である。なお、第1の隙間と第2の隙間を相互に隔離された空間にするためには、別のパーツによってコイルの外周面とシリンダの内周面との隙間を埋めるように構成すればよい。
なお、本発明では、密閉リングを備えていない構成を採用することも可能である。この場合、コイルの外周面が密閉リングを介さずにシリンダの内周面に対向する構成になる。そして、コイルの外周面とシリンダの内周面との隙間に磁気粘性流体を配置するか否かは適宜選択することができる。コイルの外周面とシリンダの内周面との隙間に磁気粘性流体を配置した場合であってもコイルの機能的には問題にならない。また、コイルの外周面とシリンダの内周面との隙間に磁気粘性流体を配置しない場合であれば、「上ヨーク突出部234の突出端面(外周面234b)とシリンダ1の内周面1aとの隙間(第1の隙間)」、及び「下ヨーク突出部235の突出端面(外周面235b)との隙間(第2の隙間)」を相互に隔てた空間に設定し、これらの隙間(第1の隙間、第2の隙間)にのみ磁気粘性流体を配置した構成を採用することが可能である。なお、第1の隙間と第2の隙間を相互に隔離された空間にするためには、別のパーツによってコイルの外周面とシリンダの内周面との隙間を埋めるように構成すればよい。
また、上述の実施形態では、ヨークのうち、シャフトの径方向においてシャフトとコイルの間に配置されるヨーク本体を、下ヨークの所定部分のみで形成した態様を例示したが、本発明においては、ヨーク本体を上ヨークの所定部分のみで形成した構成や、ヨーク本体を上ヨークの所定部分及び下ヨークの所定部分で形成した構成を採用することもできる。また、ヨークを上ヨークと下ヨークの2パーツから構成する態様に代えて、ヨークを1パーツで構成した態様や、ヨークを3以上のパーツで構成することも可能である。あるいは、ヨーク本体及びヨーク突出部をそれぞれ別パーツで構成し、これらを相互に一体的に接合したり、組み付けて構成したヨークを採用することもできる。
また、上述の実施形態では、ヨーク突出部の外周面がシャフトの径方向においてコイルの外周面よりもシリンダの内周面側に突出した面となるように、ヨーク突出部の突出寸法を適宜の値(ヨーク突出部の外径が、コイルの外径よりも大きくなる適宜の値)に設定した態様を例示したが、ヨーク突出部は、シャフトの軸方向においてコイルを挟む位置に配置されるという条件を満たせば、上記実施形態の形状に限定されない。すなわち、本発明においては、ヨーク突出部の外周面がシャフトの径方向においてコイルの外周面よりもシャフト側に寄った面となるように、ヨーク突出部の突出寸法を適宜の値(ヨーク突出部の外径をコイルの外径よりも小さい適宜の値)に設定した態様や、ヨーク突出部の外周面がシャフトの軸方向においてコイルの外周面と連続する面となるように、ヨーク突出部の突出寸法を適宜の値(ヨーク突出部の外径をコイルの外径と一致する適宜の値)に設定した態様を採用することができる。なお、ヨーク突出部の外径をコイルの外径よりも小さい適宜の値に設定した態様や、ヨーク突出部の外径をコイルの外径と一致する適宜の値に設定した態様を採用した場合、シャフトの軸方向においてコイルを挟む位置に配置されるヨーク突出部同士の間に、コイル以外のパーツ(例えば上記実施形態における密閉リング)を介在させるスペースは形成されない。
また、シリンダの内周面に密着可能なリング状の密閉シール部(上密閉シール部、下密閉シール部)は、非磁性体であればよく、断面形状や素材は特に限定されない。上述の実施形態では、シリンダの内周面に密着可能なリング状の密閉シール部(上密閉シール部、下密閉シール部)によって、磁気粘性流体の配置領域のうちシャフトの軸方向に沿った寸法を規定し、シャフトの軸方向における磁気粘性流体の封入状態を確保する構成を例示したが、密閉シール部を備えていないMRFデバイスを採用することも可能である。この場合、密閉シール部とシリンダの内周面との摺動部分がなくなる分だけ、シリンダに対するピスンの摺動抵抗(操作抵抗)を小さくすることができる。
本発明では、シリンダに対して所定のホームポジションから移動したピストンをホームポジションに復帰させる復帰部を、コイルバネを用いずに、適宜の手段や機構によって実現することも可能である。
また、復帰部を備えていないMRFデバイスであってもよい。例えば、シリンダに対して所定のホームポジションから移動したピストンがホームポジションに復帰する際の移動方向が、ピストンの自重で落下する方向と同じであれば、復帰部を省略することができる。
本発明のMRFデバイスでは、シャフト、コイル、ヨーク、及び密閉リングを同軸上に配置しない構成を採用することも可能である。
さらにはまた、本発明は、ピストンを、シリンダに対してシャフトの軸方向に沿った直線移動のみ可能に構成したMRFデバイスや、ピストンを、シャフトの中心軸回りの回転移動のみ可能に構成したMRFにすることもできる。
本発明のMRFデバイスは、シャフトの軸方向を鉛直方向以外の方向に一致させた姿勢で使用することも可能である。
また、本発明のMRFデバイスを、ジョイスティック装置以外の適宜の操作部(例えば電動車イスの操作部、三次元測定装置の操作部、ロボットアームの操作部、重機の操作部)等に実装することもできる。
本発明のMRFデバイスを単体で使用することも可能である。例えば、車に設けられるダンパ(例えば車のシートのダンパ、列車のダンパ等)や洗濯機に設けられるダンパを本発明のMRFデバイス単体で構成することができる。
その他、各部の具体的構成についても上記実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
1…シリンダ
2…ピストン
22…コイル
23(231、232)…ヨーク(上ヨーク、下ヨーク)
230…ヨーク本体
234、235…ヨーク突出部(上ヨーク突出部、下ヨーク突出部)
3…磁気粘性流体
4…密閉リング
7…復帰部(ピストン復帰部)
9…ハンドル
J…ジョイスティック装置
X…MRFデバイス
2…ピストン
22…コイル
23(231、232)…ヨーク(上ヨーク、下ヨーク)
230…ヨーク本体
234、235…ヨーク突出部(上ヨーク突出部、下ヨーク突出部)
3…磁気粘性流体
4…密閉リング
7…復帰部(ピストン復帰部)
9…ハンドル
J…ジョイスティック装置
X…MRFデバイス
Claims (6)
- 磁性体のシリンダと、前記シリンダに対して相対移動可能なピストンとを備え、
前記ピストンは、非磁性体のシャフトと、前記シャフトの周囲に配置され且つ前記シャフトの外径よりも大きい内径を有するリング状のコイルと、前記シャフトの径方向において前記シャフトと前記コイルの間に配置されるヨーク本体及び前記シャフトの軸方向において前記コイルを挟む位置に配置されるヨーク突出部を有するヨークとを備えたものであり、
少なくとも前記ヨーク突出部の外周面と前記シリンダの内周面との隙間に磁気粘性流体を配置していることを特徴とするMRFデバイス。 - 前記ヨーク突出部の外周面は、前記径方向において前記コイルの外周面よりも前記シリンダの内周面側に突出したものであり、
前記シャフトの軸方向に対峙する前記ヨーク突出部同士の隙間を密閉可能な非磁性体の密閉リングを備え、前記磁気粘性流体を前記密閉リングの外周面と前記シリンダの内周面との隙間にも配置している請求項1に記載のMRFデバイス。 - 前記シリンダに対して所定のホームポジションから移動した前記ピストンを前記ホームポジションに復帰させる復帰部を備えている請求項1又は2に記載のMRFデバイス。
- 前記シャフト、前記コイル、及び前記ヨークを同軸上に配置している請求項1乃至3の何れかに記載のMRFデバイス。
- 前記ピストンを、前記シリンダに対して前記シャフトの軸方向に沿った直線移動又は前記シャフト回りの回転移動の何れか一方または両方の移動可能に構成している請求項1乃至4の何れかに記載のMRFデバイス。
- 請求項1乃至5の何れかに記載のMRFデバイスと、前記シリンダに対して前記ピストンを移動させる操作力を付与可能なハンドルとを備えたことを特徴とするジョイスティック装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242794A JP2017111464A (ja) | 2015-12-14 | 2015-12-14 | Mrfデバイス、ジョイスティック装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242794A JP2017111464A (ja) | 2015-12-14 | 2015-12-14 | Mrfデバイス、ジョイスティック装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017111464A true JP2017111464A (ja) | 2017-06-22 |
Family
ID=59080811
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015242794A Pending JP2017111464A (ja) | 2015-12-14 | 2015-12-14 | Mrfデバイス、ジョイスティック装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017111464A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109605134A (zh) * | 2018-12-07 | 2019-04-12 | 中国科学院长春光学精密机械与物理研究所 | 一种磁流变抛光间隙的标定装置及标定方法 |
| KR20190074555A (ko) * | 2017-12-20 | 2019-06-28 | 현대모비스 주식회사 | 조이스틱을 이용한 조향장치의 조이스틱 댐핑 제어장치 및 그 방법 |
| WO2021098109A1 (zh) * | 2019-11-22 | 2021-05-27 | 南通大学 | 一种张力平衡悬挂装置 |
| CN113396293A (zh) * | 2019-03-15 | 2021-09-14 | 阿尔卑斯阿尔派株式会社 | 转矩产生装置 |
| JPWO2022107258A1 (ja) * | 2020-11-18 | 2022-05-27 | ||
| DE102021120319A1 (de) | 2021-03-16 | 2022-09-22 | Inventus Engineering Gmbh | Bedieneinrichtung mit wenigstens einem schwenkbaren Bedienhebel |
| EP4227770A4 (en) * | 2020-11-18 | 2024-06-12 | Nintendo Co., Ltd. | INFORMATION PROCESSING SYSTEM, CONTROL, INFORMATION PROCESSING METHOD AND INFORMATION PROCESSING PROGRAM |
| EP3850459B1 (fr) * | 2018-09-13 | 2025-02-12 | Safran Electronics & Defense | Dispositif d'application d'effort pour un mini-manche actif et procédé de contrôle en secours mécanique |
| US12565725B2 (en) | 2022-07-13 | 2026-03-03 | Samsung Electronics Co., Ltd. | Washing machine and controlling method for the same |
-
2015
- 2015-12-14 JP JP2015242794A patent/JP2017111464A/ja active Pending
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190074555A (ko) * | 2017-12-20 | 2019-06-28 | 현대모비스 주식회사 | 조이스틱을 이용한 조향장치의 조이스틱 댐핑 제어장치 및 그 방법 |
| KR102309835B1 (ko) | 2017-12-20 | 2021-10-07 | 현대모비스 주식회사 | 조이스틱을 이용한 조향장치의 조이스틱 댐핑 제어장치 및 그 방법 |
| EP3850459B1 (fr) * | 2018-09-13 | 2025-02-12 | Safran Electronics & Defense | Dispositif d'application d'effort pour un mini-manche actif et procédé de contrôle en secours mécanique |
| CN109605134A (zh) * | 2018-12-07 | 2019-04-12 | 中国科学院长春光学精密机械与物理研究所 | 一种磁流变抛光间隙的标定装置及标定方法 |
| CN113396293B (zh) * | 2019-03-15 | 2023-10-13 | 阿尔卑斯阿尔派株式会社 | 转矩产生装置 |
| CN113396293A (zh) * | 2019-03-15 | 2021-09-14 | 阿尔卑斯阿尔派株式会社 | 转矩产生装置 |
| WO2021098109A1 (zh) * | 2019-11-22 | 2021-05-27 | 南通大学 | 一种张力平衡悬挂装置 |
| WO2022107258A1 (ja) * | 2020-11-18 | 2022-05-27 | 任天堂株式会社 | 情報処理システム、コントローラ、情報処理方法、情報処理プログラム |
| US11921939B2 (en) | 2020-11-18 | 2024-03-05 | Nintendo Co., Ltd. | Information processing system, controller, information processing method, and computer-readable non-transitory storage medium having stored therein information processing program |
| EP4227770A4 (en) * | 2020-11-18 | 2024-06-12 | Nintendo Co., Ltd. | INFORMATION PROCESSING SYSTEM, CONTROL, INFORMATION PROCESSING METHOD AND INFORMATION PROCESSING PROGRAM |
| JP7568743B2 (ja) | 2020-11-18 | 2024-10-16 | 任天堂株式会社 | 情報処理システム、コントローラ、情報処理方法、情報処理プログラム |
| JPWO2022107258A1 (ja) * | 2020-11-18 | 2022-05-27 | ||
| DE102021120319A1 (de) | 2021-03-16 | 2022-09-22 | Inventus Engineering Gmbh | Bedieneinrichtung mit wenigstens einem schwenkbaren Bedienhebel |
| US12565725B2 (en) | 2022-07-13 | 2026-03-03 | Samsung Electronics Co., Ltd. | Washing machine and controlling method for the same |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017111464A (ja) | Mrfデバイス、ジョイスティック装置 | |
| CN114938664B (zh) | 磁流变制动装置 | |
| JP6176702B2 (ja) | ジョイスティック装置 | |
| EP2902878B1 (en) | Rotary input device | |
| US9958968B2 (en) | Input and output operation device | |
| TW201217202A (en) | Linear actuator and rocking control device for railway vehicle | |
| US11221052B2 (en) | Mount bush | |
| WO2015045732A1 (ja) | 圧力緩衝装置および減衰力発生機構 | |
| JP2005507061A (ja) | 磁界応答材料を有するブレーキ | |
| JP6778239B2 (ja) | マウントブッシュ | |
| JP7297072B2 (ja) | 操作装置 | |
| JP2020133703A (ja) | 可変剛性ブッシュ | |
| JP2009287639A (ja) | ロータリダンパ | |
| JP2007531848A (ja) | 磁気起動式の回転動作制御デバイスを備えるシステム | |
| EP3355031A1 (en) | Displacement detection apparatus for linear motion mechanism and rear wheel steering apparatus for vehicle including the same | |
| JPH0262739B2 (ja) | ||
| JP6649373B2 (ja) | 無負荷トルクを低減した触覚インタフェースのための装置 | |
| JP7161853B2 (ja) | ジョイスティック装置 | |
| JP2008285062A (ja) | 車両用サスペンション装置 | |
| JPH0632626Y2 (ja) | センサ | |
| KR101748980B1 (ko) | 자기 점성 유체 완충기 | |
| US20120279345A1 (en) | Translatably and rotatably semi-active device | |
| JP2017182148A (ja) | 操作装置 | |
| JP2022141982A (ja) | 操作装置 | |
| JP2007131231A (ja) | ステアリング操作装置 |