JP2017114405A - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- JP2017114405A JP2017114405A JP2015253993A JP2015253993A JP2017114405A JP 2017114405 A JP2017114405 A JP 2017114405A JP 2015253993 A JP2015253993 A JP 2015253993A JP 2015253993 A JP2015253993 A JP 2015253993A JP 2017114405 A JP2017114405 A JP 2017114405A
- Authority
- JP
- Japan
- Prior art keywords
- blind spot
- vehicle
- vehicle speed
- spot portion
- deceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images





Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】死角部分を通過しようとする際に、運転者に危険を感じさせることなく適度に車速を減速できるようにする。
【解決手段】車外カメラによって自車両Vの前方の道路脇に死角構築部21(死角部分)が検出されたときは、死角部分の位置(仮想衝突点C)で停止すると想定したときの必要減速度aが算出される。必要減速度aあらかじめ設定された所定のしきい値athres以下となるように指定車速が設定されて、この指定車速でもって死角部分に向けての走行が行われる。必要減速度aが所定のしきい値athresよりも大きいときは、あらかじめ警告を行うのが好ましく、また死角部分での自車両の目標位置を、走行車線11の幅方向において死角部分から離れる方向に設定することもできる。
【選択図】図2
【解決手段】車外カメラによって自車両Vの前方の道路脇に死角構築部21(死角部分)が検出されたときは、死角部分の位置(仮想衝突点C)で停止すると想定したときの必要減速度aが算出される。必要減速度aあらかじめ設定された所定のしきい値athres以下となるように指定車速が設定されて、この指定車速でもって死角部分に向けての走行が行われる。必要減速度aが所定のしきい値athresよりも大きいときは、あらかじめ警告を行うのが好ましく、また死角部分での自車両の目標位置を、走行車線11の幅方向において死角部分から離れる方向に設定することもできる。
【選択図】図2
Description
本発明は、運転支援装置に関するものである。
最近の車両では、運転支援のために、追従式の定速走行制御、自動ブレーキ制御、自動操舵制御、車線維持制御等を行う車両が増加する傾向にあり、車速や操舵を完全に自動で行う自動運転制御を行うことも実用化されつつある。特許文献1には、外部環境と自車両の走行状態とに応じて前方障害物を回避するための回避動作を推定して、この推定された回避動作となるように車両を自動制御するものが開示されている。
ところで、道路脇には、高い塀等によって死角となる死角部分が存在することが多い。この死角部分を通過しようとする車両の運転者にあっては、死角部分からの歩行者等の移動体の飛び出しが想定されることから、運転者は、危険感や緊張感をいだきつつ車速を低下させた状態で死角部分を通過する等の安全運転に気をつかうことになる。
上述した観点から、自動運転等、車速を自動制御した状態で死角部分を通過させる場合には、死角部分の手前位置であらかじめ車速を低下させるのが好ましいものとなる。しかしながら、死角部分手前で行われる車速低下のための減速度(車両の減速度)が大き過ぎると、この減速によって運転者に対して不必要に危険を感じさせてしまうことになる。
本発明は以上のような事情を勘案してなされたもので、その目的は、死角部分に向けて走行する際に、運転者に危険を感じさせることなく適度に車速を減速できるようにした運転支援装置を提供することにある。
前記目的を達成するため、本発明にあっては次のような解決手法を採択してある。すなわち、請求項1に記載のように、
自車両前方の道路脇に死角部分が存在することを検出する死角検出手段と、
前記死角検出手段により死角部分が検出されたときに、該死角部分の位置で停止すると想定したときの必要減速度があらかじめ設定された所定のしきい値以下となるように、該死角部分に向けて走行する際の指定車速を設定する設定手段と、
前記設定手段によって設定された前記指定車速でもって前記死角部分に向けての走行を行うように制御する走行制御手段と、
を備えているようにしてある。
自車両前方の道路脇に死角部分が存在することを検出する死角検出手段と、
前記死角検出手段により死角部分が検出されたときに、該死角部分の位置で停止すると想定したときの必要減速度があらかじめ設定された所定のしきい値以下となるように、該死角部分に向けて走行する際の指定車速を設定する設定手段と、
前記設定手段によって設定された前記指定車速でもって前記死角部分に向けての走行を行うように制御する走行制御手段と、
を備えているようにしてある。
上記解決手法によれば、死角部分から歩行者等の移動体が飛び出してくるのを想定したときに、移動体との衝突回避のために必要な必要減速度が所定のしきい値以下となるようにあらかじめ車速を低下させるので、運転者に対して危険感を感じさせることなく、死角部分へ向けての走行を行う上で好ましいものとなる。
前記必要減速度が前記所定のしきい値を超えるときに、警報を行う警報手段をさらに備えている、ようにしてある(請求項2対応)。この場合、大きな減速度が生じることを警報によって運転者に報知することにより、運転者が危険を感じてしまう事態を低減する上で好ましいものとなる。
前記設定手段は、前記想定減速度が前記所定のしきい値を超えるときは、さらに、現在の走行経路でもって前記死角部分を通過すると予測される自車両位置よりも該死角部分から離れる方向の位置に指定自車両位置を設定し、
前記走行制御手段は、自車両が前記指定自車両位置に向けて走行するように制御する、
ようにしてある(請求項3対応)。この場合、衝突回避をより確実に行えるようにしつつ、必要減速度を極力小さくする上で好ましいものとなる。
前記走行制御手段は、自車両が前記指定自車両位置に向けて走行するように制御する、
ようにしてある(請求項3対応)。この場合、衝突回避をより確実に行えるようにしつつ、必要減速度を極力小さくする上で好ましいものとなる。
運転者状態を検出する運転者状態検出手段と、
前記運転者状態検出手段により検出される運転者状態に基づいて、前記所定値を補正する補正手段と、
ようにしてある(請求項4対応)。この場合、所定のしきい値を個々の運転者に応じて適切な大きさに設定して、請求項1に対応した効果をより十分に得る上で好ましいものとなる。
前記運転者状態検出手段により検出される運転者状態に基づいて、前記所定値を補正する補正手段と、
ようにしてある(請求項4対応)。この場合、所定のしきい値を個々の運転者に応じて適切な大きさに設定して、請求項1に対応した効果をより十分に得る上で好ましいものとなる。
前記運転者状態検出手段が、前記死角部分を通過する前後での運転者状態の変化を検出するようにされている、ようにしてある(請求項5対応)。この場合、死角部分を通過することに対応した運転者状態の変化を精度よく検出して、請求項4に対応した効果をより十分に発揮させる上で好ましいものとなる。
前記死角部分から自車両が走行している走行車線へ向けて歩行者が歩行速度Vobsで進入することを想定したとき、該死角部分から該走行車線への歩行者の飛び出し位置までの距離をD、自車両の現在の車速をVvehとしたとき、歩行者との衝突回避に要求される前記必要減速度aが歩行速度Vobsと現在の車速Vvehと距離Dとに基づいて算出され、
前記必要減速度aが前記所定値よりも大きいときには、前記指定車速が前記現在の車速Vvehよりも小さくなるように設定される、ようにしてある(請求項6対応)。この場合、歩行者の飛び出しを想定して、請求項1に対応した効果を得ることができる。
前記必要減速度aが前記所定値よりも大きいときには、前記指定車速が前記現在の車速Vvehよりも小さくなるように設定される、ようにしてある(請求項6対応)。この場合、歩行者の飛び出しを想定して、請求項1に対応した効果を得ることができる。
本発明によれば、死角部分に向けて走行する際に、運転者に危険を感じさせることなく適度に車速を減速できる。
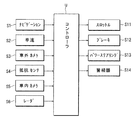
本発明の制御系統例を示す図1において、Uはマイクロコンピュータを利用して構成されたコントローラ(制御ユニット)である。このコントローラUには、各種センサあるいは機器類S1〜S6からの信号が入力される。S1は、ナビゲーション装置であり、自車両が走行している道路の種類や自車両位置を検出するものとなっている。S2は、車速を検出する車速センサである。S3は、自車両前方の状況を撮像する車外カメラであり、自車両前方の障害物特に死角部分の検出や、衝突の可能性のある障害物(例えば歩行者等)を検出する他、特に自車両が走行している走行車線を規制する左右の白線位置を検出するものとなっている(自動運転や車線維持制御用)。S4は、ステアリングハンドルに設けられて、運転者の皮膚抵抗を検出する抵抗センサであり、運転者の緊張に伴う発汗に応じて変化される皮膚抵抗を検出するものとなっている。S5は、車室内を撮像する車内カメラであり、特に、運転者の表情(顔)や瞳孔の状態を検出して、運転者の緊張感、不快感、不安感の度合い(レベル)を検出するためのものである(運転者状態検出手段)。S6は、自車両前方の死角部分や前方障害物等までの距離を検出するレーダである。なお、運転者の緊張度合い等の検出は、心拍を検出することにより行う等、適宜の手法によりなし得る。
コントローラUは、スロットルアクチュエータS11(加速、減速、車速維持という車速制御用)、ブレーキアクチュエータS12(減速や停止の制御用)、パワーステアリング装置S13(操舵制御用)を制御する。なお、実施形態では、自車両は、自動運転を行う車両とされて、設定された目的地までの走行経路の自動生成と、自動ブレーキ制御と、自動車速制御と、自動操舵制御とを行うようになっている。コントローラUは、さらに、警報器S14を制御して、大きな減速を行うことを運転者に警告するために、例えば音声による警告や、ヘッドアップディスプレイ等を利用した警報表示を行うようになっている。
次に、図2を参照しつつ、本発明の制御内容について説明する。まず、11は、自車両Vが走行している走行車線であり、その左右の境界線(白線)が符号11a、11bで示される。なお、走行車線11は、左側通行用とされている。自車両Vの前方位置において、走行車線11のすぐ脇(境界線11aのすぐそば)には、例えば高い塀からなる死角構築部21が存在して、この死角構築部21の後方側が自車両Vからの死角部分となっている。
死角構築部21の後方側にいる移動体としての歩行者Hが、歩行速度Vobsでもって走行車線11を横断するように走行車線11に飛び出してきて、自車両Vと衝突すると想定される仮想衝突点が符号Cで示される。死角構築部21の位置する境界線11aから仮想衝突点Cまでの距離がDとして示される。また、自車両Vから仮想衝突点Cまでの距離がLで示される。
次に、自車両Vが仮想衝突点Cの位置で停止するときに必要な必要減速度について説明する。まず、歩行者Hが、歩行速度Vobsでもって距離D分だけ歩行するのに要する時間をTcとすると、次式(1)が成立する。

また、上記時間Tcの間に、自車両Vが仮想衝突点Cに到達するまでの距離Lは、次式(2)で示される。
上記式(1)、式(2)とから、次式(3)が得られる。
自車両Vの制動限界距離Llimitは、自車両Vの減速度をaとすると、次式(4)で示される。
Llimi≦Lであれば、自車両Vと歩行者Hとが仮想衝突点Cにおいて衝突しないので、式(3)、式(4)から、衝突回避に必要な減速度aが次式(5)を満足する大きさであればよいことになる。そして、式(5)を満足する減速度aが、必要減速度aとなる。
次に、ドライビングシミュレータを用いて、車両の減速度が運転者に与える影響についての実験結果について説明する。ドライビングシミュレータでは、その表示画面に自車両の前方状況が示される。そして、表示画面中の前方状況として、自車両の前方に存在する死角部分から、自車両の走行車線を横断するように被験者が飛び出る状況が表示される(図2のような状況の擬似的再現)。このような状況において、飛び出してきた歩行者との衝突回避のために車両を減速させると共に減速度を種々変更して、被験者に与える心理的影響を測定した。この心理的影響としては、ステアリングハンドルに設けた抵抗センサを利用して被験者の発汗量を測定することにより、運転者の危険感知度合い(あるいは緊張度合い)を測定するものとした。
図3は、上記被験者の発汗量と車両減速度との関係をまとめたものである。この図3から明かなように、減速度(前述した必要減速度a対応)が3m/s2 強以下であれば、危険を感じないと判断することができる。すなわち、必要減速度aを3m/s2 に設定することにより、例えば自動運転の際に車両が減速しても、運転者は危険を感じないですむことになる。
以上のことから、前方に死角部分が存在するときは、必要減速度aが3m/s2 以下となる減速を行いつつ車速を低下させた状態で、死角部分を通過させればよいことになる。つまり、所定のしきい値としての後述する必要減速度用のしきい値athres として、上記3m/s2 を設定すればよいことになる。
次に、図4に示すフローチャートを参照しつつ、前述した死角部分を通過しようとする際のコントローラUによる制御例について説明する。なお、以下の設定でQはステップを示す。また、制御例では、走行経路の設定を含む自動運転を行う場合を前提としてある。
まず、Q1において、各種センサあるいは機器類S1〜S6からの信号が入力される。Q2では、既知の適宜の手法によって、自車両Vの走行経路(通過する走行車線11の選定や走行車線11上での自車両位置や車速)が生成されて、この生成された走行経路に沿って自動運転が行われる。
Q3では、車外カメラS3によって、死角部分(例えば図2における死角構築部21)が検出されたか否かが判別される。このQ3の判別でNOのときは、そのままリターンされる。Q3の判別でYESのときは、Q4において、Q2で生成された走行経路でもって走行した際に、死角部分で停止するのに必要な必要減速度aが算出される。なお、必要減速度aの算出に際しては、死角部分から通常の歩行速度(例えば4km/hで、図2におけるVobs対応)でもって走行車線を横断するように歩行者が飛び出してくる場合が想定したものとされる。また、図2における仮想衝突点Cは、走行経路上の横方向中間位置(例えば図2において、自車両Vが走行している走行車線11の横方向中間位置)とされ、距離Dはこれに応じて決定される。
Q4の後、Q5において、算出された必要減速度aが、前述したしきい値athresよりも大きいか否かが判別される。このQ5の判別でNOのときは、そのままリターンされる。
上記Q5の判別でYESのときは、Q6において、警報器S14が作動されて、運転者に対して警告が与えられる。この後、Q7において、必要減速度aがしきい値athres以下となるように、車速の修正(減速)や、自車両Vが走行する位置の修正(例えば図2において境界線11b側に片寄った位置や、その隣の走行車線を通過するように位置修正)が行われる。
図5は、しきい値athresを、個々の運転者にとってより好ましい大きさとなるように補正するようにした例が示される。すなわち、どの程度の減速度であれば危険を感じるのかは、運転者毎に微妙に相違するので、この点を勘案して、個々の運転者にとって適正な大きさのしきい値athresを得るための処理となっている。この図5に示す制御は、図4に示す制御に対して並列処理としてもよく、あるいは図4におけるQ8の後の処理として行うことができる。
先ず、Q11において死角部分が検出されると、Q12において、死角部分を通過した際の運転者の発汗量が計測される(例えばステアリングハンドルに設けた抵抗センサS4の利用)。この後、発汗量に応じて、しきい値athresが補正(学習補正)される。すなわち、発汗量が増大したときは、しきい値athresを所定分だけ小さくなるように補正し、発汗量が増大しないときは、しきい値athresを所定分だけ大きくなるように補正する。このような補正によって、しきい値athresが、死角部分を通過した際に発汗量が増大しない(危険を感じない)範囲でもって大きい値に設定されて、個々の運転者に対応した大きさに設定されることになる。
図6は、しきい値athresの補正を、抵抗センサS4のようなセンサを別途用いないで行うようにした場合の例を示す。すなわち、Q21において死角部分が検出されると、Q12において、必要減速度aが算出される。この後、Q3において、一定量以上の必要減速度aのデータが蓄積されたか否かが判別される。当初は、Q23の判別でNOとなり、このときは、Q24において、必要減速度aが蓄積(記憶)される。Q24で蓄積された必要減速度aのデータが増大するのに伴って、やがて、Q23の判別でYESのとなる。このときは、Q25のいて、Q24に蓄積されている一定量のデータに基づいて、しきい値athresが決定される。このQ25でのしきい値athresの決定は、例えば、蓄積されたデータの平均値とすることができる。
以上実施形態について説明したが、本発明は、実施形態に限定されるものではなく、特許請求の範囲の記載された範囲において適宜の変更が可能である。死角部分を通過するときの車速について、下限車速を設定してもよい。この下限車速は、例えば道路の種類に応じて変更することもできる。例えば高速道路や自動車専用道路では、歩行者等の飛び出しが想定されないことから、下限車速の設定なしとするのが好ましい。また、一般道路では、例えば住宅街の中の道路や狭い道路では、下限車速を相対的に低い車速として設定し、そうでないときは相対的に大きい車速として設定することができる。本発明は、自動運転を行う場合に限らず、例えば設定車速を上限車速とする追従式の定速走行制御を行う場合等にも適用できる。フローチャートに示す各ステップあるいはステップ群は、コントローラUの有する機能を示すもので、この機能を示す名称に手段の文字を付して、コントローラUの有する構成要件として把握することができる。勿論、本発明の目的は、明記されたものに限らず、実質的に好ましいあるいは利点として表現されたものを提供することをも暗黙的に含むものである。
本発明は、死角部分を通過する際の運転支援として好適なものを提供できる。
U:コントローラ
S2:車速センサ
S3:車外カメラ(死角部分検出用)
S4:抵抗センサ(運転者の緊張度合い検出用)
S5:車内カメラ(運転者状態検出用)
S6:レーダ(前方障害物までの距離検出用)
S11:スロットルアクチュエータ(車速制御用)
S12:ブレーキアクチュエータ(減速または停止用)
S13:パワーステアリング装置(舵角制御用)
S14:警報器
11:走行車線
21:死角構築部
V:自車両
H:歩行者(移動体)
C:仮想衝突点
D:距離
L:距離
Vobs:歩行速度
Vveh:車速
athres:所定のしきい値
S2:車速センサ
S3:車外カメラ(死角部分検出用)
S4:抵抗センサ(運転者の緊張度合い検出用)
S5:車内カメラ(運転者状態検出用)
S6:レーダ(前方障害物までの距離検出用)
S11:スロットルアクチュエータ(車速制御用)
S12:ブレーキアクチュエータ(減速または停止用)
S13:パワーステアリング装置(舵角制御用)
S14:警報器
11:走行車線
21:死角構築部
V:自車両
H:歩行者(移動体)
C:仮想衝突点
D:距離
L:距離
Vobs:歩行速度
Vveh:車速
athres:所定のしきい値
Claims (6)
- 自車両前方の道路脇に死角部分が存在することを検出する死角検出手段と、
前記死角検出手段により死角部分が検出されたときに、該死角部分の位置で停止すると想定したときの必要減速度があらかじめ設定された所定のしきい値以下となるように、該死角部分に向けて走行する際の指定車速を設定する設定手段と、
前記設定手段によって設定された前記指定車速でもって前記死角部分に向けての走行を行うように制御する走行制御手段と、
を備えていることを特徴とする運転支援装置。 - 請求項1において、
前記必要減速度が前記所定のしきい値を超えるときに、警報を行う警報手段をさらに備えている、ことを特徴とする運転支援装置。 - 請求項1または請求項2において、
前記設定手段は、前記想定減速度が前記所定のしきい値を超えるときは、さらに、現在の走行経路でもって前記死角部分を通過すると予測される自車両位置よりも該死角部分から離れる方向の位置に指定自車両位置を設定し、
前記走行制御手段は、自車両が前記指定自車両位置に向けて走行するように制御する、
ことを特徴とする運転支援装置。 - 請求項1ないし請求項3のいずれか1項において、
運転者状態を検出する運転者状態検出手段と、
前記運転者状態検出手段により検出される運転者状態に基づいて、前記所定値を補正する補正手段と、
をさらに備えていることを特徴とする運転支援装置。 - 請求項4において、
前記運転者状態検出手段が、前記死角部分を通過する前後での運転者状態の変化を検出するようにされている、ことを特徴とする運転支援装置。 - 請求項1ないし請求項5のいずれか1項において、
前記死角部分から自車両が走行している走行車線へ向けて歩行者が歩行速度Vobsで進入することを想定したとき、該死角部分から該走行車線への歩行者の飛び出し位置までの距離をD、自車両の現在の車速をVvehとしたとき、歩行者との衝突回避に要求される前記必要減速度が歩行速度Vobsと現在の車速Vvehと距離Dとに基づいて算出され、
前記必要減速度が前記所定値よりも大きいときには、前記指定車速が前記現在の車速Vvehよりも小さくなるように設定される、ことを特徴とする運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015253993A JP2017114405A (ja) | 2015-12-25 | 2015-12-25 | 運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015253993A JP2017114405A (ja) | 2015-12-25 | 2015-12-25 | 運転支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017114405A true JP2017114405A (ja) | 2017-06-29 |
Family
ID=59233388
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015253993A Abandoned JP2017114405A (ja) | 2015-12-25 | 2015-12-25 | 運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017114405A (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109421718A (zh) * | 2017-09-05 | 2019-03-05 | 安波福技术有限公司 | 自动化速度控制系统 |
| CN109515433A (zh) * | 2017-09-19 | 2019-03-26 | 丰田自动车株式会社 | 车辆控制系统 |
| CN110329251A (zh) * | 2019-07-24 | 2019-10-15 | 江西江铃集团新能源汽车有限公司 | 车辆防碰撞制动方法及系统 |
| JP2019182120A (ja) * | 2018-04-06 | 2019-10-24 | 株式会社デンソー | 自動運転車制御装置 |
| CN110481526A (zh) * | 2019-07-22 | 2019-11-22 | 江苏大学 | 一种智能汽车传感器盲区行人检测及主动避撞方法 |
| CN110509842A (zh) * | 2019-08-15 | 2019-11-29 | 重庆长安汽车股份有限公司 | 一种车辆低速段盲区检测、换道辅助方法及系统 |
| JP2020093766A (ja) * | 2018-12-05 | 2020-06-18 | パナソニックIpマネジメント株式会社 | 車両の制御装置、制御システム、及び制御プログラム |
| WO2020011281A3 (en) * | 2019-09-04 | 2020-06-25 | Tingting Zhao | System and method for controlling vehicle |
| CN111497840A (zh) * | 2020-04-27 | 2020-08-07 | 清华大学 | 车辆-行人碰撞风险域的计算方法及安全评价系统 |
| CN112829743A (zh) * | 2019-11-07 | 2021-05-25 | 丰田自动车株式会社 | 驾驶辅助装置 |
| WO2021124794A1 (ja) * | 2019-12-16 | 2021-06-24 | 日立Astemo株式会社 | 車両制御装置、および、車両制御システム |
| JP2021111213A (ja) * | 2020-01-14 | 2021-08-02 | 株式会社ダイフク | 物品搬送設備 |
| CN114175023A (zh) * | 2019-07-31 | 2022-03-11 | 北美日产公司 | 应急规划和安全保证 |
| WO2022097365A1 (ja) * | 2020-11-06 | 2022-05-12 | 日立Astemo株式会社 | 外界認識装置、および、外界認識方法 |
| CN115457804A (zh) * | 2021-06-08 | 2022-12-09 | 本田技研工业株式会社 | 控制装置、移动体、控制方法和计算机可读存储介质 |
| US12071127B2 (en) | 2021-07-16 | 2024-08-27 | Nissan North America, Inc. | Proactive risk mitigation |
| JPWO2024247034A1 (ja) * | 2023-05-29 | 2024-12-05 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004034881A (ja) * | 2002-07-05 | 2004-02-05 | Honda Motor Co Ltd | 車両の走行制御装置 |
| JP2004175148A (ja) * | 2002-11-25 | 2004-06-24 | Denso Corp | 車速制御装置およびプログラム |
| WO2006070865A1 (ja) * | 2004-12-28 | 2006-07-06 | Kabushiki Kaisha Toyota Chuo Kenkyusho | 車両運動制御装置 |
| JP2006252148A (ja) * | 2005-03-10 | 2006-09-21 | Toyota Motor Corp | 車両用制御装置 |
| JP2007057510A (ja) * | 2005-08-26 | 2007-03-08 | Equos Research Co Ltd | ナビゲーション装置 |
| JP2009086788A (ja) * | 2007-09-28 | 2009-04-23 | Hitachi Ltd | 車両周辺監視装置 |
| JP2013196031A (ja) * | 2012-03-15 | 2013-09-30 | Toyota Motor Corp | 運転支援装置 |
| JP2013196359A (ja) * | 2012-03-19 | 2013-09-30 | Honda Motor Co Ltd | 運転支援装置 |
| JP2014028543A (ja) * | 2012-07-31 | 2014-02-13 | Nissan Motor Co Ltd | 車両用走行制御装置及び方法 |
-
2015
- 2015-12-25 JP JP2015253993A patent/JP2017114405A/ja not_active Abandoned
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004034881A (ja) * | 2002-07-05 | 2004-02-05 | Honda Motor Co Ltd | 車両の走行制御装置 |
| JP2004175148A (ja) * | 2002-11-25 | 2004-06-24 | Denso Corp | 車速制御装置およびプログラム |
| WO2006070865A1 (ja) * | 2004-12-28 | 2006-07-06 | Kabushiki Kaisha Toyota Chuo Kenkyusho | 車両運動制御装置 |
| JP2006252148A (ja) * | 2005-03-10 | 2006-09-21 | Toyota Motor Corp | 車両用制御装置 |
| JP2007057510A (ja) * | 2005-08-26 | 2007-03-08 | Equos Research Co Ltd | ナビゲーション装置 |
| JP2009086788A (ja) * | 2007-09-28 | 2009-04-23 | Hitachi Ltd | 車両周辺監視装置 |
| JP2013196031A (ja) * | 2012-03-15 | 2013-09-30 | Toyota Motor Corp | 運転支援装置 |
| JP2013196359A (ja) * | 2012-03-19 | 2013-09-30 | Honda Motor Co Ltd | 運転支援装置 |
| JP2014028543A (ja) * | 2012-07-31 | 2014-02-13 | Nissan Motor Co Ltd | 車両用走行制御装置及び方法 |
Cited By (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109421718B (zh) * | 2017-09-05 | 2021-09-03 | 安波福技术有限公司 | 自动化速度控制系统及其操作方法 |
| US11639174B2 (en) | 2017-09-05 | 2023-05-02 | Aptiv Technologies Limited | Automated speed control system |
| CN109421718A (zh) * | 2017-09-05 | 2019-03-05 | 安波福技术有限公司 | 自动化速度控制系统 |
| CN109515433A (zh) * | 2017-09-19 | 2019-03-26 | 丰田自动车株式会社 | 车辆控制系统 |
| CN109515433B (zh) * | 2017-09-19 | 2022-01-14 | 丰田自动车株式会社 | 车辆控制系统 |
| JP7077731B2 (ja) | 2018-04-06 | 2022-05-31 | 株式会社デンソー | 自動運転車制御装置 |
| JP2019182120A (ja) * | 2018-04-06 | 2019-10-24 | 株式会社デンソー | 自動運転車制御装置 |
| JP2020093766A (ja) * | 2018-12-05 | 2020-06-18 | パナソニックIpマネジメント株式会社 | 車両の制御装置、制御システム、及び制御プログラム |
| CN110481526A (zh) * | 2019-07-22 | 2019-11-22 | 江苏大学 | 一种智能汽车传感器盲区行人检测及主动避撞方法 |
| CN110481526B (zh) * | 2019-07-22 | 2021-05-25 | 江苏大学 | 一种智能汽车传感器盲区行人检测及主动避撞方法 |
| CN110329251A (zh) * | 2019-07-24 | 2019-10-15 | 江西江铃集团新能源汽车有限公司 | 车辆防碰撞制动方法及系统 |
| CN110329251B (zh) * | 2019-07-24 | 2020-09-01 | 江西江铃集团新能源汽车有限公司 | 车辆防碰撞制动方法及系统 |
| JP7401650B2 (ja) | 2019-07-31 | 2023-12-19 | ニッサン ノース アメリカ,インク | 偶発事象対応計画及び安全保障 |
| JP2022542277A (ja) * | 2019-07-31 | 2022-09-30 | ニッサン ノース アメリカ,インク | 偶発事象対応計画及び安全保障 |
| CN114175023A (zh) * | 2019-07-31 | 2022-03-11 | 北美日产公司 | 应急规划和安全保证 |
| CN110509842A (zh) * | 2019-08-15 | 2019-11-29 | 重庆长安汽车股份有限公司 | 一种车辆低速段盲区检测、换道辅助方法及系统 |
| US12397781B2 (en) | 2019-09-04 | 2025-08-26 | Jinan Zhenzhen Technology Research Institute | System and method for controlling vehicle |
| WO2020011281A3 (en) * | 2019-09-04 | 2020-06-25 | Tingting Zhao | System and method for controlling vehicle |
| CN112829743B (zh) * | 2019-11-07 | 2024-02-09 | 丰田自动车株式会社 | 驾驶辅助装置 |
| CN112829743A (zh) * | 2019-11-07 | 2021-05-25 | 丰田自动车株式会社 | 驾驶辅助装置 |
| JP7234103B2 (ja) | 2019-12-16 | 2023-03-07 | 日立Astemo株式会社 | 車両制御装置、および、車両制御システム |
| JP2021094953A (ja) * | 2019-12-16 | 2021-06-24 | 日立Astemo株式会社 | 車両制御装置、および、車両制御システム |
| US12168439B2 (en) | 2019-12-16 | 2024-12-17 | Hitachi Astemo, Ltd. | Vehicle control device, and vehicle control system |
| WO2021124794A1 (ja) * | 2019-12-16 | 2021-06-24 | 日立Astemo株式会社 | 車両制御装置、および、車両制御システム |
| JP7327174B2 (ja) | 2020-01-14 | 2023-08-16 | 株式会社ダイフク | 物品搬送設備 |
| US11904915B2 (en) | 2020-01-14 | 2024-02-20 | Daifuku Co., Ltd. | Article transport facility |
| JP2021111213A (ja) * | 2020-01-14 | 2021-08-02 | 株式会社ダイフク | 物品搬送設備 |
| CN111497840A (zh) * | 2020-04-27 | 2020-08-07 | 清华大学 | 车辆-行人碰撞风险域的计算方法及安全评价系统 |
| JPWO2022097365A1 (ja) * | 2020-11-06 | 2022-05-12 | ||
| WO2022097365A1 (ja) * | 2020-11-06 | 2022-05-12 | 日立Astemo株式会社 | 外界認識装置、および、外界認識方法 |
| US12462520B2 (en) | 2020-11-06 | 2025-11-04 | Hitachi Astemo, Ltd. | Outside environment recognition device and outside environment recognition method |
| JP7464748B2 (ja) | 2020-11-06 | 2024-04-09 | 日立Astemo株式会社 | 外界認識装置、および、外界認識方法 |
| US12240450B2 (en) | 2021-06-08 | 2025-03-04 | Honda Motor Co., Ltd. | V2X warning system for identifying risk areas within occluded regions |
| CN115457804A (zh) * | 2021-06-08 | 2022-12-09 | 本田技研工业株式会社 | 控制装置、移动体、控制方法和计算机可读存储介质 |
| US12071127B2 (en) | 2021-07-16 | 2024-08-27 | Nissan North America, Inc. | Proactive risk mitigation |
| WO2024247034A1 (ja) * | 2023-05-29 | 2024-12-05 | 三菱電機モビリティ株式会社 | 配光制御装置、及び、配光制御方法 |
| JP7721042B2 (ja) | 2023-05-29 | 2025-08-08 | 三菱電機モビリティ株式会社 | 配光制御装置、及び、配光制御方法 |
| JPWO2024247034A1 (ja) * | 2023-05-29 | 2024-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017114405A (ja) | 運転支援装置 | |
| CN106515735B (zh) | 驶离车位辅助 | |
| KR101759804B1 (ko) | 운전 지원 장치 및 운전 지원 방법 | |
| US9802613B2 (en) | Driver assistance system for motor vehicles | |
| US8838337B2 (en) | Vehicle automatic steering control apparatus | |
| CN105848981B (zh) | 用于车辆的驾驶员辅助方法和系统 | |
| KR101409747B1 (ko) | 횡방향 제어 장치 및 그 제어 방법 | |
| US20130124041A1 (en) | Method for assisting a driver of a vehicle during a driving maneuver | |
| CN103069466B (zh) | 用于预测驾驶员的变线意图的系统 | |
| CN104487308B (zh) | 驾驶辅助装置 | |
| CN104837707B (zh) | 驾驶员辅助系统及用于运行驾驶员辅助系统的方法 | |
| JP6205947B2 (ja) | 自動運転制御装置 | |
| EP3887219B1 (en) | Advanced highway assist scenario | |
| JP6397248B2 (ja) | 車両用走行支援装置 | |
| KR102922879B1 (ko) | 자동차의 측면 위치를 계산하는 방법 | |
| JP5897787B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP6948790B2 (ja) | ドライバを支援するための方法および装置 | |
| EP2682318B1 (en) | Motor vehicle collision warning system | |
| JP2016199262A (ja) | 後退走行中の前輪軌道逸脱に基づく衝突の回避 | |
| JP2011198247A (ja) | 運転支援装置 | |
| JP2015170233A (ja) | 複数の移動体との衝突回避システム | |
| KR20190038077A (ko) | 차선 유지 제어장치 및 제어방법 | |
| CN109866767A (zh) | 驾驶机动车及避免碰撞另一机动车的控制系统及控制方法 | |
| JP2022500297A (ja) | 少なくとも部分的に自動運転される第1の車両を運転する方法および装置 | |
| WO2020235385A1 (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170323 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20171226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180109 |