JP2017122645A - 磁気センサ - Google Patents
磁気センサ Download PDFInfo
- Publication number
- JP2017122645A JP2017122645A JP2016001661A JP2016001661A JP2017122645A JP 2017122645 A JP2017122645 A JP 2017122645A JP 2016001661 A JP2016001661 A JP 2016001661A JP 2016001661 A JP2016001661 A JP 2016001661A JP 2017122645 A JP2017122645 A JP 2017122645A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic sensor
- bias magnet
- bias
- magnetic
- sensor element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000000758 substrate Substances 0.000 claims abstract description 25
- 230000005415 magnetization Effects 0.000 claims abstract description 19
- 238000001514 detection method Methods 0.000 claims abstract description 10
- 239000000463 material Substances 0.000 claims description 11
- 239000010410 layer Substances 0.000 description 17
- 230000000052 comparative effect Effects 0.000 description 13
- 238000012986 modification Methods 0.000 description 13
- 230000004048 modification Effects 0.000 description 13
- 230000004907 flux Effects 0.000 description 11
- 229920005989 resin Polymers 0.000 description 9
- 239000011347 resin Substances 0.000 description 9
- 238000007789 sealing Methods 0.000 description 6
- 238000002474 experimental method Methods 0.000 description 4
- 239000011241 protective layer Substances 0.000 description 4
- 229910052737 gold Inorganic materials 0.000 description 3
- 239000010931 gold Substances 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 229910004298 SiO 2 Inorganic materials 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000003822 epoxy resin Substances 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000000059 patterning Methods 0.000 description 2
- 229920000647 polyepoxide Polymers 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229910000828 alnico Inorganic materials 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- IUWCPXJTIPQGTE-UHFFFAOYSA-N chromium cobalt Chemical compound [Cr].[Co].[Co].[Co] IUWCPXJTIPQGTE-UHFFFAOYSA-N 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- AJCDFVKYMIUXCR-UHFFFAOYSA-N oxobarium;oxo(oxoferriooxy)iron Chemical compound [Ba]=O.O=[Fe]O[Fe]=O.O=[Fe]O[Fe]=O.O=[Fe]O[Fe]=O.O=[Fe]O[Fe]=O.O=[Fe]O[Fe]=O.O=[Fe]O[Fe]=O AJCDFVKYMIUXCR-UHFFFAOYSA-N 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 229910052761 rare earth metal Inorganic materials 0.000 description 1
- 150000002910 rare earth metals Chemical class 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 238000000992 sputter etching Methods 0.000 description 1
- 229920001187 thermosetting polymer Polymers 0.000 description 1
- 238000001039 wet etching Methods 0.000 description 1
Images














Landscapes
- Measuring Magnetic Variables (AREA)
- Hall/Mr Elements (AREA)
Abstract
【課題】磁気センサの出力の線形性を良好にしつつ磁気センサを小型にする。【解決手段】ブリッジ回路を構成する複数の磁気抵抗素子が基板の上面に形成されている磁気センサ素子110と、上記基板の上面との間に複数の磁気抵抗素子が位置するように、磁気センサ素子110上に固定された1つのバイアス磁石120とを備える。バイアス磁石120による磁化方向20が、磁気センサ素子110の磁界検出方向10に対して90°以外の角度で交差するように、バイアス磁石120が配置されている。【選択図】図2
Description
本発明は、磁気センサに関し、特に、磁気抵抗素子を含む磁気センサに関する。
磁気センサの構成を開示した先行文献として、特開平5−341026号公報(特許文献1)がある。特許文献1に記載された磁気センサは、ブリッジ回路を構成する複数の磁気抵抗素子が基板の上面に形成されている磁気センサ素子と、磁気センサ素子にバイアス磁界を印加するバイアス磁石とを備えている。
特許文献1に記載された磁気センサにおいては、磁気センサ素子の基板の下面側にバイアス磁石が配置されている。そのため、複数の磁気抵抗素子とバイアス磁石との間に、基板の厚さに相当するギャップが生ずる。このギャップによって、複数の磁気抵抗素子の各々に印加されるバイアス磁界が減衰する。複数の磁気抵抗素子の各々に印加されるバイアス磁界の強度が低い場合、磁気センサの出力の線形性が低下する。
複数の磁気抵抗素子の各々に印加されるバイアス磁界の強度を維持するために大きなバイアス磁石を用いた場合、磁気センサの小型化の妨げとなる。
本発明は上記の問題点に鑑みてなされたものであって、出力の線形性が良好な小型の磁気センサを提供することを目的とする。
本発明に基づく磁気センサは、ブリッジ回路を構成する複数の磁気抵抗素子が基板の上面に形成されている磁気センサ素子と、上記基板の上面との間に複数の磁気抵抗素子が位置するように、磁気センサ素子上に固定された1つのバイアス磁石とを備える。バイアス磁石による磁化方向が、磁気センサ素子の磁界検出方向に対して90°以外の角度で交差するように、バイアス磁石が配置されている。
本発明の一形態においては、複数の磁気抵抗素子のうちの、磁気センサ素子の磁界検出方向と直交する方向に延びる磁化容易軸を有する第1磁気抵抗素子の磁化容易軸と、バイアス磁石による磁化方向とのなす角度が、29°以上34°以下である。
本発明の一形態においては、バイアス磁石の外形が、円柱状または円環状である。
本発明の一形態においては、バイアス磁石が、等方性磁石である。
本発明の一形態においては、バイアス磁石が、等方性磁石である。
本発明の一形態においては、磁気センサ素子とバイアス磁石とは、接合材によって互いに固定されている。
本発明によれば、磁気センサの出力の線形性を良好にしつつ磁気センサを小型にすることができる。
以下、本発明の各実施形態に係る、磁気センサについて図を参照して説明する。以下の実施形態の説明においては、図中の同一または相当部分には同一符号を付して、その説明は繰り返さない。
(実施形態1)
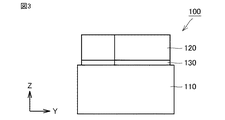
図1は、本発明の実施形態1に係る磁気センサの構成を示す斜視図である。図2は、図1の磁気センサを矢印II方向から見た平面図である。図3は、図1の磁気センサを矢印III方向から見た側面図である。
図1は、本発明の実施形態1に係る磁気センサの構成を示す斜視図である。図2は、図1の磁気センサを矢印II方向から見た平面図である。図3は、図1の磁気センサを矢印III方向から見た側面図である。
図1〜3に示すように、本発明の実施形態1に係る磁気センサ100は、磁気センサ素子110と、磁気センサ素子110上に固定された1つのバイアス磁石120とを備える。平面視にて、バイアス磁石120による磁化方向20が、磁気センサ素子110の磁界検出方向10に対して90°以外の角度で交差するように、バイアス磁石120が配置されている。磁気センサ素子110とバイアス磁石120とは、接合材130によって互いに固定されている。図1〜3においては、磁気センサ素子110における、幅方向をX軸方向、長さ方向をY軸方向、厚さ方向をZ軸方向として示している。
図4は、本発明の実施形態1に係る磁気センサが備える磁気センサ素子の平面図である。図5は、本発明の実施形態1に係る磁気センサが備える磁気センサ素子に設けられているブリッジ回路の等価回路図である。図6は、本発明の実施形態1に係る磁気センサが備える磁気センサ素子の積層構造を示す断面図である。
図4〜6に示すように、磁気センサ素子110においては、ブリッジ回路を構成する4つの磁気抵抗素子が、基板111の上面に形成されている。基板111上には、電源端子Vcc、接地端子GND、第1出力端子V+および第2出力端子V-が形成されている。4つの磁気抵抗素子は、互いに電気的に接続されてホイートストンブリッジ型のブリッジ回路を構成している。
具体的には、第1磁気抵抗素子MR1および第2磁気抵抗素子MR2の直列接続体と、第3磁気抵抗素子MR3および第4磁気抵抗素子MR4の直列接続体とが、電源端子Vccと接地端子GNDとの間に並列接続されている。第1磁気抵抗素子MR1と第2磁気抵抗素子MR2との接続点には、第1出力端子V+が接続されている。第3磁気抵抗素子MR3と第4磁気抵抗素子MR4との接続点には、第2出力端子V-が接続されている。
第1磁気抵抗素子MR1、第2磁気抵抗素子MR2、第3磁気抵抗素子MR3および第4磁気抵抗素子MR4の各々は、AMR(Anisotropic Magneto Resistance)素子である。
基板111は、Siなどから構成されており、表面にSiO2層またはSi3N4層などが設けられている。4つの磁気抵抗素子は、基板111の上面に設けられた、NiとFeとを含む合金からなる磁性体層112が、イオンミリング法などによりパターニングされることにより形成されている。
基板111上には、AuまたはAlなどからなる導電層113が、ウエットエッチングによりパターニングされることにより形成されている。導電層113は、磁性体層112の上面に形成されている。なお、導電層113の一部が、基板111の上面に設けられていてもよい。電源端子Vcc、接地端子GND、第1出力端子V+および第2出力端子V-の各々は、導電層113によって構成されている。
磁性体層112および導電層113は、SiO2からなる保護層114によって覆われている。保護層114には、電源端子Vcc、接地端子GND、第1出力端子V+および第2出力端子V-の各々の上方に位置する部分に、外部接続用の開口部114hが設けられている。開口部114hに、半田バンプが形成されていてもよい。
第1磁気抵抗素子MR1、第2磁気抵抗素子MR2、第3磁気抵抗素子MR3および第4磁気抵抗素子MR4の各々を構成する磁性体層112は、つづら折り状に設けられており、外形が略矩形状である。第1磁気抵抗素子MR1、第2磁気抵抗素子MR2、第3磁気抵抗素子MR3および第4磁気抵抗素子MR4は、全体として略正方形状である。
第1磁気抵抗素子MR1および第4磁気抵抗素子MR4の各々を構成する磁性体層112においては、X軸方向に延在する複数の長手部と、Y軸方向に延在する複数の短手部とが、直列に接続されており、X軸方向に延びる磁化容易軸30を有している。
第2磁気抵抗素子MR2および第3磁気抵抗素子MR3の各々を構成する磁性体層112においては、Y軸方向に延在する複数の長手部と、X軸方向に延在する複数の短手部とが、直列に接続されており、Y軸方向に延びる磁化容易軸を有している。
第1磁気抵抗素子MR1および第4磁気抵抗素子MR4の各々の磁化容易軸30と、磁気センサ素子110の磁界検出方向10とのなすバイアス角度θは、磁気センサ100の用途に応じて、5°以上85°以下の範囲において設定可能である。後述するように、磁気センサ100の出力の線形性の観点からは、バイアス角度θは、29°以上34°以下であることが好ましく、31°であることがより好ましい。
本実施形態においては、磁気センサ素子110は、直方体状の外形を有しており、たとえば、幅が0.2mm、長さが0.45mm、厚さが0.3mmである。
バイアス磁石120は、直方体状の外形を有しており、たとえば、幅が0.3mm、長さが0.3mm、厚さが0.15mmである。バイアス磁石120は、等方性磁石である。等方性磁石としては、等方性アルニコ、等方性クロムコバルト、等方性バリウムフェライト、等方性酸化物系ボンド磁石、および、等方性希土類コバルト系ボンド磁石などがある。
接合材130としては、エポキシ樹脂系接着剤、銀ペーストなどの導電性接着剤、または、ダイアタッチフィルムなどを用いることができる。接合材130は、磁気センサ素子110の保護層114とバイアス磁石120とを接合している。磁気センサ素子110の基板111の上面とバイアス磁石120との間に4つの磁気抵抗素子が位置するように、バイアス磁石120が接合材130によって磁気センサ素子110上に固定されている。
ここで、バイアス磁石を磁気センサ素子の基板の上面側に配置することによって、バイアス磁石を磁気センサ素子の基板の下面側に配置した場合に比較して、磁気抵抗素子に印加されるバイアス磁界の強度を維持しつつバイアス磁石を小型にできることを、シミュレーション解析によって検証した実験例1について説明する。
実験例1においては、実施例1および比較例1〜3の4種類の磁気センサについて解析を行なった。実施例1に係る磁気センサにおいては、実施形態1に係る磁気センサと同様の構成を有し、基板111の厚さを0.1mm、接合材130の層の厚さを0.03mmとした。
比較例1〜3の各々に係る磁気センサにおいては、バイアス磁石を磁気センサ素子の基板の下面側に配置し、接合材130の層の厚さを0.03mmとした。基板111の厚さについて、比較例1は0.1mm、比較例2は0.2mm、比較例3は0.3mmとした。
よって、磁気抵抗素子とバイアス磁石との間のZ方向の距離は、実施例1は0.03mm、比較例1は0.13mm、比較例2は0.23mm、比較例3は0.33mmとなる。
実施例1および比較例1〜3の各々に係る磁気センサにおいて、磁気抵抗素子に印加されるバイアス磁界の強度が155mTとなるために必要なバイアス磁石の最小体積を算出した。
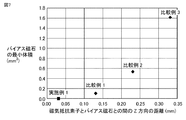
図7は、実験例1の結果を示すグラフである。図7においては、縦軸にバイアス磁石の最小体積(mm3)、横軸に磁気抵抗素子とバイアス磁石との間のZ方向の距離(mm)を示している。
図7に示すように、バイアス磁石の最小体積は、実施例1は0.0135mm3、比較例1は0.108mm3、比較例2は0.54mm3、比較例3は1.62mm3であった。
実験例1の結果から、バイアス磁石120を磁気センサ素子110の基板111の上面側に配置することによって、磁気抵抗素子に印加されるバイアス磁界の強度を維持しつつバイアス磁石120を小型にできることが確認できた。基板111の一般的な厚さは0.2mm程度であり、一般的な厚さより薄い基板を有する比較例1に係る磁気センサと比較しても、実施例1に係る磁気センサは、バイアス磁石を1/8の大きさに小型にできることが確認できた。
ここで、バイアス磁界による磁化方向と磁気センサの出力の線形性との関係についてシミュレーション解析した実験例2について説明する。まず、磁気センサの出力の線形性誤差率について定義する。図8は、磁気センサの出力の誤差率を説明するためのグラフである。図8においては、縦軸に出力電圧(V)、横軸に外部磁界の磁束密度(mT)を示している。図8においては、実測出力電圧を実線で、仮想出力電圧を二点鎖線で示している。
仮想出力電圧は、外部磁界の測定予定範囲における実測出力電圧を直線近似して求められている。具体的には、仮想出力電圧は、入力磁束密度および実測出力電圧を最小二乗法を用いて1次関数にて近似して求められている。
磁気センサにおける外部磁界の測定予定範囲に対応する出力電圧の最大値と最小値との間の間隔である出力電圧のフルスケールに対する、実測出力電圧と仮想出力電圧との差の比率を、磁気センサの出力の線形性誤差率と定義する。
たとえば、磁気センサにおける外部磁界の測定予定範囲が±20mTであり、外部磁界の磁束密度が20mTのときの仮想出力電圧を2.0V、外部磁界の磁束密度が−20mTのときの仮想出力電圧を−2.0Vとすると、出力電圧のフルスケールは4.0Vとなる。外部磁界の磁束密度が15mTのとき、実測出力電圧が1.5V、仮想出力電圧が1.48Vであった場合、磁気センサの出力の線形性誤差率は、(1.5−1.48)/4.0×100=0.5%となる。
上記のように定義される磁気センサの出力の線形性誤差率は、バイアス磁界による磁化方向およびバイアス磁界の強度によって変化する。磁気センサの出力の線形性誤差率が、±2.0%以内であることが好ましい。
実験例2においては、第1の実験条件として、電源端子Vccの電位を5Vとし、バイアス磁界の磁束密度を90mTとし、バイアス磁界による磁化方向として、上記のバイアス角度θを20°、25°、30°、35°、40°および45°の6種類設定した。外部磁界は、磁気センサ素子の磁界検出方向に印加されている。
図9は、実験例2において第1の実験条件で解析した結果を示すグラフである。図9においては、縦軸に線形性誤差率(%)、横軸に外部磁界の磁束密度(mT)を示している。
図9に示すように、線形性誤差率は、外部磁界の磁束密度が0mTおよび±20mTのとき大きく、外部磁界の磁束密度が±12mTのとき略0%となった。バイアス角度θが30°のとき、線形性誤差率が最も小さくなった。
次に、実験例2の第2の実験条件として、電源端子Vccの電位を5Vとし、バイアス磁界の磁束密度を、90mT、100mT、150mT、200mTおよび250mTの5種類設定し、バイアス磁界による磁化方向としては、上記のバイアス角度θを25°以上35°以下の範囲で1°間隔の11種類設定した。外部磁界は、磁気センサ素子の磁界検出方向に印加されている。
図10は、実験例2において第2の実験条件で解析した結果を示すグラフである。図10においては、縦軸に線形性誤差率(%)、横軸にバイアス角度(°)を示している。
図10に示すように、バイアス磁界の強度が大きくなるに従って、線形性誤差率は小さくなった。バイアス角度θが29°以上34°以下の範囲においては、バイアス磁界の磁束密度が90mT以上にて線形性誤差率が2.0%以下であった。バイアス角度θが31°のとき、線形性誤差率が最も小さかった。
実験例2の結果から、バイアス角度θを31°とすることにより、磁気センサの出力の線形性を最も良好にすることができ、バイアス角度θを29°以上34°以下にすることにより、磁気センサの出力の線形性を良好にすることができることが確認できた。
上記の実験例1および実験例2の結果から分かるように、本実施形態に係る磁気センサ100においては、バイアス磁石120を複数の磁気抵抗素子に接近させて配置することにより、バイアス磁界の減衰を抑制して効果的にバイアス磁界を複数の磁気抵抗素子の各々に印加することができる。その結果、磁気センサ100の出力の線形性を良好にしつつバイアス磁石120を小型にすることができ、ひいては磁気センサ100を小型にすることができる。また、バイアス角度を29°以上34°以下にすることによっても、磁気センサ100の出力の線形性を良好にすることができる。
本実施形態に係る磁気センサ100の磁気センサ素子110においては、第1磁気抵抗素子MR1、第2磁気抵抗素子MR2、第3磁気抵抗素子MR3および第4磁気抵抗素子MR4によってフルブリッジ回路が構成されているが、磁気センサ素子110の構成は上記に限られず、第1磁気抵抗素子MR1および第2磁気抵抗素子MR2によってハーフブリッジ回路が構成されていてもよい。この場合、磁気センサ素子110には、第3磁気抵抗素子MR3、第4磁気抵抗素子MR4および第2出力端子V-は設けられない。
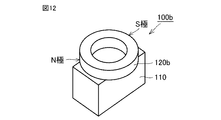
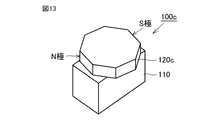
本実施形態においては、バイアス磁石120の外形は直方体状であるが、バイアス磁石120の外形は、直方体状に限られず、角柱状、円柱状または円環状などであってもよい。図11は、バイアス磁石の外形が円柱状である、第1変形例に係る磁気センサの構成を示す斜視図である。図12は、バイアス磁石の外形が円環状である、第2変形例に係る磁気センサの構成を示す斜視図である。図13は、バイアス磁石の外形が角柱状である、第3変形例に係る磁気センサの構成を示す斜視図である。
図11に示すように、第1変形例に係る磁気センサ100aは、磁気センサ素子110と、磁気センサ素子110上に固定された1つのバイアス磁石120aとを備える。バイアス磁石120aの外形は、円柱状である。
図12に示すように、第2変形例に係る磁気センサ100bは、磁気センサ素子110と、磁気センサ素子110上に固定された1つのバイアス磁石120bとを備える。バイアス磁石120bの外形は、円環状である。
図13に示すように、第3変形例に係る磁気センサ100cは、磁気センサ素子110と、磁気センサ素子110上に固定された1つのバイアス磁石120cとを備える。バイアス磁石120cの外形は、角柱状である。具体的には、バイアス磁石120cの外形は、八角柱状である。
第1変形例に係る磁気センサ100aにおいては、バイアス磁石120aの外形は、円柱状であり、形状異方性を有さない。また、バイアス磁石120aの材料が等方性である。そのため、バイアス磁石120aの磁化方向を高精度に制御することができる。その結果、バイアス角度θを高精度で維持して、磁気センサ100aの出力の線形性を良好にすることができる。さらに、バイアス磁石120aを磁気センサ素子110上に固定した後でバイアス磁石120aを着磁するため、バイアス磁石120aを磁気センサ素子110上に配置する際にバイアス磁石120aの向きを固定する必要がなく、磁気センサの組み立てが容易である。
第2変形例に係る磁気センサ100bにおいても、第1変形例に係る磁気センサ100aと同様の効果を得ることができる。第3変形例に係る磁気センサ100cにおいては、角の数を多くすることにより、バイアス磁石120cのチッピングの発生を抑制することができ、その結果、バイアス磁石120cのチッピングによるバイアス磁界の乱れが生じることを抑制できる。
(実施形態2)
以下、本発明の実施形態2に係る磁気センサについて説明する。なお、本発明の実施形態2に係る磁気センサは、フレームに実装された状態でパッケージされている点のみ本発明の実施形態1に係る磁気センサと異なるため、本発明の実施形態1に係る磁気センサと同様の構成については説明を繰り返さない。
以下、本発明の実施形態2に係る磁気センサについて説明する。なお、本発明の実施形態2に係る磁気センサは、フレームに実装された状態でパッケージされている点のみ本発明の実施形態1に係る磁気センサと異なるため、本発明の実施形態1に係る磁気センサと同様の構成については説明を繰り返さない。
図14は、本発明の実施形態2に係る磁気センサの外観を示す斜視図である。図15は、本発明の実施形態2に係る磁気センサにおいて樹脂封止前の状態の外観を示す斜視図である。図16は、図15の磁気センサを矢印XVI方向から見た平面図である。図17は、図16の磁気センサを矢印XVII方向から見た側面図である。図18は、図16の磁気センサを矢印XVIII方向から見た正面図である。
図14〜18に示すように、本発明の実施形態2に係る磁気センサ200は、磁気センサ素子110と、磁気センサ素子110上に固定された1つのバイアス磁石120と、磁気センサ素子110が実装されたフレーム210と、磁気センサ素子110、バイアス磁石120およびフレーム210を覆う封止樹脂220とを備える。磁気センサ200は、直方体状の外形を有している。磁気センサ200は、たとえば、幅が2mm、長さが2mmである。
フレーム210は、磁気センサ素子110が載置される平板部と、平板部と間隔をあけて位置する複数の端子部とを含む。複数の端子部は、互いに間隔をあけて並んでいる。複数の端子部の各々の一部は、封止樹脂220に覆われておらず、磁気センサ200の外表面に露出している。フレーム210は、導電材料の表面に金メッキが施されて構成されている。フレーム210の厚さは、たとえば、0.1mmである。
磁気センサ素子110において、電源端子Vcc、接地端子GND、第1出力端子V+および第2出力端子V-は、フレーム210の複数の端子部のいずれか1つにワイヤ230によってそれぞれ接続されている。ワイヤ230の材料は、たとえば金である。ワイヤ230の直径は、たとえば0.08mmである。
封止樹脂220としては、たとえば、エポキシ樹脂などのマトリックス樹脂に、シリカフィラーが充填された熱硬化性樹脂が用いられる。
本発明の実施形態2に係る磁気センサ200においては、磁気センサ200の機械的強度が向上しているため、自動機によって磁気センサ200を実装することが可能となる。
上述した実施形態の説明において、組み合わせ可能な構成を相互に組み合わせてもよい。
今回開示された実施形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
10 磁界検出方向、20 磁化方向、30 磁化容易軸、100,100a,100b,100c,200 磁気センサ、110 磁気センサ素子、111 基板、112 磁性体層、113 導電層、114 保護層、114h 開口部、120,120a,120b,120c バイアス磁石、130 接合材、210 フレーム、220 封止樹脂、230 ワイヤ、GND 接地端子、MR1 第1磁気抵抗素子、MR2 第2磁気抵抗素子、MR3 第3磁気抵抗素子、MR4 第4磁気抵抗素子、V+ 第1出力端子、V- 第2出力端子、Vcc 電源端子。
Claims (5)
- ブリッジ回路を構成する複数の磁気抵抗素子が基板の上面に形成されている磁気センサ素子と、
前記基板の前記上面との間に前記複数の磁気抵抗素子が位置するように、前記磁気センサ素子上に固定された1つのバイアス磁石とを備え、
前記バイアス磁石による磁化方向が、前記磁気センサ素子の磁界検出方向に対して90°以外の角度で交差するように、前記バイアス磁石が配置されている、磁気センサ。 - 前記複数の磁気抵抗素子のうちの、前記磁気センサ素子の前記磁界検出方向と直交する方向に延びる磁化容易軸を有する第1磁気抵抗素子の磁化容易軸と、前記バイアス磁石による前記磁化方向とのなす角度が、29°以上34°以下である、請求項1に記載の磁気センサ。
- 前記バイアス磁石の外形が、円柱状または円環状である、請求項1または請求項2に記載の磁気センサ。
- 前記バイアス磁石が、等方性磁石である、請求項3に記載の磁気センサ。
- 前記磁気センサ素子と前記バイアス磁石とは、接合材によって互いに固定されている、請求項1から請求項4のいずれか1項に記載の磁気センサ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016001661A JP2017122645A (ja) | 2016-01-07 | 2016-01-07 | 磁気センサ |
| CN201621455790.3U CN206400082U (zh) | 2016-01-07 | 2016-12-28 | 磁传感器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016001661A JP2017122645A (ja) | 2016-01-07 | 2016-01-07 | 磁気センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017122645A true JP2017122645A (ja) | 2017-07-13 |
Family
ID=59306797
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016001661A Pending JP2017122645A (ja) | 2016-01-07 | 2016-01-07 | 磁気センサ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017122645A (ja) |
| CN (1) | CN206400082U (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019090789A (ja) * | 2017-11-15 | 2019-06-13 | 株式会社デンソー | 回転検出装置 |
| JP2021081293A (ja) * | 2019-11-19 | 2021-05-27 | Tdk株式会社 | 磁気センサ |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115735097A (zh) * | 2020-07-03 | 2023-03-03 | 株式会社村田制作所 | 位置检测装置 |
| WO2022004226A1 (ja) * | 2020-07-03 | 2022-01-06 | 株式会社村田製作所 | 位置検出装置 |
-
2016
- 2016-01-07 JP JP2016001661A patent/JP2017122645A/ja active Pending
- 2016-12-28 CN CN201621455790.3U patent/CN206400082U/zh active Active
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019090789A (ja) * | 2017-11-15 | 2019-06-13 | 株式会社デンソー | 回転検出装置 |
| JP7056503B2 (ja) | 2017-11-15 | 2022-04-19 | 株式会社デンソー | 回転検出装置 |
| JP2021081293A (ja) * | 2019-11-19 | 2021-05-27 | Tdk株式会社 | 磁気センサ |
| CN112904246A (zh) * | 2019-11-19 | 2021-06-04 | Tdk株式会社 | 磁传感器 |
| JP7070532B2 (ja) | 2019-11-19 | 2022-05-18 | Tdk株式会社 | 磁気センサ |
| CN112904246B (zh) * | 2019-11-19 | 2024-03-19 | Tdk株式会社 | 磁传感器 |
| US11965941B2 (en) | 2019-11-19 | 2024-04-23 | Tdk Corporation | Magnetic sensor |
| US12298363B2 (en) | 2019-11-19 | 2025-05-13 | Tdk Corporation | Magnetic sensor having magnetoresistive effect element with inclined magnetization direction of pinned layer |
Also Published As
| Publication number | Publication date |
|---|---|
| CN206400082U (zh) | 2017-08-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10126378B2 (en) | Single-chip Z-axis linear magnetic resistance sensor | |
| CN108627781B (zh) | 磁传感器 | |
| JP5271448B2 (ja) | 磁気式位置検出装置 | |
| US20130200883A1 (en) | Magnetic field sensor | |
| US20150097560A1 (en) | Magnetic sensor device | |
| US6472868B1 (en) | Magnetic impedance element having at least two thin film-magnetic cores | |
| US9903920B2 (en) | Magnetic field sensor device | |
| JPWO2013176271A1 (ja) | 電流センサ | |
| CN102428380A (zh) | 磁通门传感器及使用其的电子方位计 | |
| JP7070532B2 (ja) | 磁気センサ | |
| JP2017122645A (ja) | 磁気センサ | |
| US20200158791A1 (en) | Sensor package with integrated magnetic shield structure | |
| JP5867465B2 (ja) | 磁気センサ | |
| JP5006671B2 (ja) | 磁気エンコーダ | |
| CN106662470A (zh) | 磁式线性编码器 | |
| JP2007263951A (ja) | 磁気センサ | |
| US20090066465A1 (en) | Magnetic core for testing magnetic sensors | |
| JP2005221418A (ja) | 圧力センサ | |
| CN103942872A (zh) | 一种低飞移高度面内磁性图像识别传感器芯片 | |
| US20170016745A1 (en) | Magnetic sensor | |
| JP5426839B2 (ja) | 磁気センサの製造方法 | |
| US20150198430A1 (en) | Magnetism detection element and rotation detector | |
| US12326482B2 (en) | Magnetic system for counting rotations having increased stability against magnetic interference fields | |
| WO2023153065A1 (ja) | 磁気センサ | |
| JP6222897B2 (ja) | 多軸磁気センサ、および、その製造方法 |