JP2017124468A - ロボット制御方法、部品の製造方法、ロボット装置、プログラム及び記録媒体 - Google Patents
ロボット制御方法、部品の製造方法、ロボット装置、プログラム及び記録媒体 Download PDFInfo
- Publication number
- JP2017124468A JP2017124468A JP2016004855A JP2016004855A JP2017124468A JP 2017124468 A JP2017124468 A JP 2017124468A JP 2016004855 A JP2016004855 A JP 2016004855A JP 2016004855 A JP2016004855 A JP 2016004855A JP 2017124468 A JP2017124468 A JP 2017124468A
- Authority
- JP
- Japan
- Prior art keywords
- end effector
- robot
- imaging
- link
- robot arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Manipulator (AREA)
Abstract
【課題】ロボットアームの動作を止めることなく、ロボットアームの先端リンクに対するエンドエフェクタの位置ずれを高精度に求める。
【解決手段】ロボットアームを動作させて、撮像範囲内の被写体を撮像する撮像装置に対してエンドエフェクタの移動を開始する(S3)。エンドエフェクタが撮像範囲内を通過中に、先端リンクを回転軸を中心に回転させた回転状態で、撮像装置にエンドエフェクタを撮像させる(S4,S5,S6)。撮像画像中のエンドエフェクタの中心軸の軌跡に基づき、先端リンクの回転軸に対するエンドエフェクタの中心軸の位置ずれを算出する(S7)。
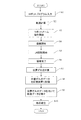
【選択図】図4
【解決手段】ロボットアームを動作させて、撮像範囲内の被写体を撮像する撮像装置に対してエンドエフェクタの移動を開始する(S3)。エンドエフェクタが撮像範囲内を通過中に、先端リンクを回転軸を中心に回転させた回転状態で、撮像装置にエンドエフェクタを撮像させる(S4,S5,S6)。撮像画像中のエンドエフェクタの中心軸の軌跡に基づき、先端リンクの回転軸に対するエンドエフェクタの中心軸の位置ずれを算出する(S7)。
【選択図】図4
Description
本発明は、エンドエフェクタが取り付けられた先端リンクに対するエンドエフェクタの位置ずれを算出する技術に関する。
多関節のロボットアームは、複数のリンクが関節で揺動又は回転するように連結されて構成されている。特に、ロボットアームの先端部に位置する先端リンクは、関節で回転するように他のリンクに連結されている。先端リンクには、ロボットハンド等のエンドエフェクタが着脱可能に取り付けられている。これにより、作業内容に応じてエンドエフェクタを交換することが可能となっている。
エンドエフェクタを交換したとき、ロボットアームの先端軸、即ち先端リンクの回転軸に対し、エンドエフェクタの中心軸がずれてエンドエフェクタがロボットアームに装着されることがある。したがって、ロボットを用いて部品の組み立て作業を高精度に行う場合、ロボットアームの先端軸、即ち先端リンクの回転軸に対するエンドエフェクタの中心軸の位置ずれを校正する必要がある。つまり、先端軸に対するエンドエフェクタの中心軸の位置ずれを求め、位置ずれをキャンセルするようにエンドエフェクタを付け直すか、ロボットアームの位置指令値(つまり、軌道)を補正する必要がある。
従来、エンドエフェクタとしてのロボットハンドが把持した測定治具のマークを、カメラに撮像させて、撮像画像からロボットハンドの位置ずれを測定する方法が提案されている(特許文献1参照)。特許文献1の方法では、ロボットハンドをカメラの前で一旦停止させてカメラによる撮像を行っている。このとき、ロボットハンドが把持した測定治具のマークを、ロボットアームの先端軸の回転角度を180°異なられた2つの位置でカメラに撮像させて、撮像画像からロボットハンドの位置ずれを測定している。
しかしながら、特許文献1の方法では、ロボットハンドで測定治具を把持してカメラの前で一旦停止して撮像を行うため、位置ずれの測定に時間がかかっていた。また、測定した位置ずれは、ロボットハンドの回転精度の影響を大きく受けるため、測定結果に誤差が生じる問題があった。即ち、ロボットハンドを先端軸を中心に180°回転させたつもりでも実際には180°からずれていることがあり、回転角度の誤差が位置ずれの測定精度の低下を招いていた。
そこで、本発明は、ロボットアームの動作を止めることなく、ロボットアームの先端リンクに対するエンドエフェクタの位置ずれを高精度に求めることを目的とする。
本発明は、制御部が、エンドエフェクタが取り付けられた先端リンクを有するロボットアームの動作を制御するロボット制御方法であって、前記制御部が、前記ロボットアームを動作させて、撮像範囲内の被写体を撮像する撮像装置に対して前記エンドエフェクタを移動させる移動工程と、前記制御部が、前記エンドエフェクタが前記撮像範囲内を通過中に、前記先端リンクを回転軸を中心に回転させた回転状態で、前記撮像装置に前記エンドエフェクタを撮像させる撮像工程と、前記制御部が、前記撮像工程にて得られた撮像画像中の前記エンドエフェクタの中心軸の軌跡に基づき、前記先端リンクの回転軸に対する前記エンドエフェクタの中心軸の位置ずれを算出する位置ずれ算出工程と、を備えている。
本発明によれば、ロボットアームの動作を止めることなく、ロボットアームの先端リンクに対するエンドエフェクタの位置ずれを高精度に求めることができる。
以下、本発明を実施するための形態を、図面を参照しながら詳細に説明する。図1は、実施形態に係るロボット装置を示す斜視図である。ロボット装置100は、ロボット200と、ロボット200の動作を制御する制御装置400と、ユーザの操作によりロボット200の動作を教示する教示部としてのティーチングペンダント600と、を備えている。更に、ロボット装置100は、撮像装置としてのカメラ500と、カメラ500で取得した画像を処理する画像処理装置300と、を備えている。
ロボット200と制御装置400とは信号線等の配線で接続されている。カメラ500と画像処理装置300とは信号線等の配線で接続されている。制御装置400と画像処理装置300とは信号線等の配線で接続されている。制御装置400とティーチングペンダント600とは信号線等の配線で接続されている。なお、これら機器の通信は有線で行われるが、無線で行われるように構成されていてもよい。
ロボット200は、垂直多関節型のロボットアーム201と、ロボットアーム201の先端に取り付けられた、エンドエフェクタとしてのロボットハンド202と、を有している。なお、ロボットアーム201の先端とロボットハンド202との間に力覚センサが配置されていてもよい。この場合、ロボットハンド202は、ロボットアーム201の先端に力覚センサを介して取り付けられることになる。
ロボットアーム201は、架台150に固定されるベース部(基端リンク)210と、変位や力を伝達する複数のリンク211〜216とが関節J1〜J6で揺動(旋回)又は回転可能に連結されている。本実施形態では、ロボットアーム201は、揺動する3軸と回転する3軸の6軸の関節J1〜J6で構成されている。ここで、揺動する関節を揺動部、回転する関節を回転部と呼ぶ。ロボットアーム201は、6つの関節J1〜J6から構成され、関節J1,J4,J6が回転部、関節J2,J3,J5が揺動部である。
本実施形態では、ベース部(固定端)210に対して反対側のリンク、つまりロボットアーム201の先端部であるリンク(先端リンク、自由端)216は、リンク215に対して回転軸(先端軸)C1を中心に回転可能に構成されている。つまり関節J6は回転部である。
ロボットアーム201は、各関節J1〜J6に対してそれぞれ設けられ、各関節J1〜J6をそれぞれ駆動する複数(6つ)の関節駆動装置(不図示)を有している。各関節駆動装置は、不図示の電動モータ、減速機及び制御基板等を有して構成されている。制御基板(関節制御部)は、入力した関節指令値(角度指令値)に基づき関節角度を制御する。つまり、制御基板は、関節角度が関節指令値に近づくように、電動モータの回転を制御する。
図2(a)は、実施形態におけるロボットの先端部を示す模式図である。図2(b)は、実施形態におけるロボットハンドの座面側からロボットハンドを見た平面図である。
ロボットハンド202は、ベース部220と、ベース部220の座面側に開閉可能に支持された複数(3つ)のフィンガー221とを有する。
複数のフィンガー221は、中心軸C2に近接又は離間するよう不図示の駆動装置により駆動される。複数のフィンガー221が中心軸C2に近接する方向に移動する動作を閉動作、複数のフィンガー221が中心軸C2から離間する方向に移動する動作を開動作とする。複数のフィンガー221を閉動作させることにより、第1ワークであるワークW1を把持することができ、複数のフィンガー221を開動作させることにより、ワークW1を把持解放することができる。
ロボットハンド202は、複数のフィンガー221を用いてワークW1を把持することにより、第1ワークであるワーク(嵌合部品)W1を第2ワークであるワーク(被嵌合部品)W2に組付ける組付作業を行うことができる。この組付作業により、ワークW1及びワークW2からなる組立部品が製造される。
ロボットハンド202は、リンク216に対して着脱可能となっている。具体的には、図2(a)に示すように、リンク216の先端に保持機構217が設けられており、保持機構217によりロボットハンド202(ベース部220)が保持されることで、リンク216にロボットハンド202が装着される。よって、リンク216には、作業内容に適したエンドエフェクタを装着することができる。本実施形態では、組付作業を行うため、ロボットハンド202がリンク216に装着されているものとする。
図2(b)に示すように、ロボットハンド202のベース部220の座面中心(座面において中心軸C2と交差する点)には、マークMKが形成されている。マークMKは、ロボットハンド202の中心位置を識別できれば何でもよい。例えば、穴、突起、シール、反射材、発光部材等、種々のマークを用いることができる。また、マークMKの形状も、ロボットハンド202の中心位置を識別できれば何でもよい。例えば、円形、十字形など、種々の形状とすることができる。マークMKの色は、他の部材と識別できる色とするのが好ましい。本実施形態では、マークMKは、円形の凹み穴に、フィンガー221などの他の部材とは異なる色に着色されて構成されている。
図1に示すように、カメラ500は、CCD(Charge Coupled Device)イメージセンサやCMOS(Complementary Metal Oxide Semiconductor)イメージセンサ等の撮像センサ501を有する。カメラ500は、架台150(ロボットアーム201のベース部210)に対して移動しないように、架台150に固定されている。カメラ500は、撮像範囲内(画角内)の被写体を撮像する。本実施形態では、ロボットハンド202(つまりマークMK)が被写体となる。
ここで、カメラ500の撮像面(撮像センサ501のセンサ面)に平行な平面をXY平面とし、XY平面に垂直な方向をZ軸方向とする。
図3は、実施形態に係るロボット装置の制御系の構成を示すブロック図である。画像処理装置300及び制御装置400は、コンピュータで構成されている。つまり、本実施形態では、複数のコンピュータで分散して各機器を制御する。具体的には、画像処理装置300は、カメラ500の撮像タイミング、シャッタースピード等を制御し、制御装置400は、ロボットアーム201及びロボットハンド202の動作を制御する。これら画像処理装置300及び制御装置400で制御システム800が構成されている。
画像処理装置300は、CPU(Central Processing Unit)301を備えている。また、画像処理装置300は、記憶部として、ROM(Read Only Memory)302、RAM(Random Access Memory)303、HDD(Hard Disk Drive)304を備えている。また、画像処理装置300は、記録ディスクドライブ305及びインタフェース311,312を備えている。CPU301には、ROM302、RAM303、HDD304、記録ディスクドライブ305及びインタフェース311,312が、バスを介して接続されている。
制御装置400は、CPU401を備えている。また、制御装置400は、記憶部として、ROM402、RAM403、HDD404を備えている。また、制御装置400は、インタフェース411〜414を備えている。CPU401には、ROM402、RAM403、HDD404及びインタフェース411〜414が、バスを介して接続されている。
ROM302,402には、コンピュータを動作させる基本プログラム等が格納されている。RAM303,403は、CPU301,401の演算処理結果等、各種データを一時的に記憶する記憶装置である。
HDD304,404は、CPU301,401の演算処理結果や外部から取得した各種データ等を記憶する記憶装置であると共に、CPU301,401に、後述する演算処理を実行させるためのプログラム320,420を記録するものである。CPU301,401は、HDD304,404に記録(格納)されたプログラム320,420に基づいてロボット制御方法の各工程を実行する。つまり、本実施形態では、各プログラム320,420をそれぞれ実行する複数のCPU301,401で制御部801が構成されている。
記録ディスクドライブ305は、記録ディスク321に記録された各種データやプログラム等を読み出すことができる。
カメラ500は、インタフェース312に接続されている。カメラ500の撮像により生成された撮像画像は、インタフェース312及びバスを介してCPU301に出力される。CPU301は、この撮像画像を画像処理することができる。
ティーチングペンダント(TP)600は、インタフェース412に接続されている。ティーチングペンダント600は、ユーザの入力操作により、ロボットアーム201を教示する教示点を指定するものである。教示点のデータは、インタフェース412及びバスを通じてHDD404に出力される。
HDD404は、ティーチングペンダント600により指定された教示点のデータを格納することができる。CPU401は、HDD404に設定(格納)された教示点のデータを読み出すことができる。また、HDD404には、教示点間の補間方法などが指定されたロボットプログラムが格納されている。
インタフェース413には、ロボットアーム201が接続されている。インタフェース414には、ロボットハンド202が接続されている。CPU401は、インタフェース413を介してロボットアーム201に関節指令値のデータを出力して、ロボットアーム201の各関節の動作を制御する。
また、CPU401は、インタフェース414を介してロボットハンド202に駆動指令値のデータを出力してロボットハンド202の動作を制御する。
なお、本実施形態では、コンピュータ読み取り可能な記録媒体がHDD304(404)であり、HDD304(404)にプログラム320(420)が格納される場合について説明するが、これに限定するものではない。プログラム320(420)は、コンピュータ読み取り可能な記録媒体であれば、いかなる記録媒体に記録されていてもよい。例えば、プログラム320(420)を供給するための記録媒体としては、図3に示す記録ディスク321、不図示の外部記憶装置等を用いてもよい。具体例を挙げて説明すると、記録媒体として、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、USBメモリ等の不揮発性メモリ、ROM等を用いることができる。
ここで、ロボットアーム201の先端、つまりロボットハンド202には、ツールセンターポイント(TCP)が設定されている。TCPは、位置を表す3つのパラメータ(x,y,z)と、姿勢を表す3つのパラメータ(Rx,Ry,Rz)、即ち6つのパラメータ(x,y,z,Rx,Ry,Rz)で表され、タスク空間上では、1つの点としてみなすことができる。つまり、タスク空間は、これら6つの座標軸で規定された空間である。このTCPで教示点を指定することができる。
また、教示点を関節角度(コンフィグレーション)で指定することもできる。本実施形態では、ロボットアーム201の関節が6つあるので、教示点は、関節角度を表す6つのパラメータを示すコンフィグレーション(θ1,θ2,θ3,θ4,θ5,θ6)で表され、関節空間上では、1つの点とみなすことができる。つまり、関節空間は、これら6つの座標軸で規定された空間である。
本実施形態では、教示点は、タスク空間又は関節空間で指定される。CPU401は、ロボットプログラムで指定された補間方法に従い、教示点間を補間するロボットアーム201の経路(補間経路)データを生成する。ここで、教示点間を補間する補間方法としては、直線補間、円弧補間、関節補間、Spline補間、B−Spline補間、ベジェ曲線など、種々の方法がある。経路データとは、タスク空間におけるロボットアーム201のTCPの軌跡、又は関節空間におけるロボットアーム201のコンフィグレーションの軌跡である。
そして、CPU401は、ロボットアーム201の動作を規定する軌道データを計算する。ロボットアーム201の軌道データとは、時間をパラメータとして経路データを表したものである。本実施形態では、時刻毎(例えば1ms毎)のTCPの位置指令値、又はコンフィグレーションの関節指令値の集合である。位置指令値は、6つのパラメータ(x,y,z,Rx,Ry,Rz)で表され、関節指令値は、6つのパラメータ(θ1,θ2,θ3,θ4,θ5,θ6)で表される。
軌道データが位置指令値の場合、CPU401は、最終的には位置指令値を各関節J1〜J6の関節角度を示す関節指令値に逆運動学に基づき変換する。関節指令値を各関節J1〜J6の関節駆動装置の制御基板に出力することで、ロボットアーム201の動作を制御する。軌道データが関節指令値の場合、CPU401は、関節指令値を各関節J1〜J6の関節駆動装置の制御基板に出力することで、ロボットアーム201の動作を制御する。
このように、CPU401は、位置指令値又は関節指令値からなる軌道データを用いてロボットアーム201の位置制御を行う。
次に、制御部801の制御方法(組立部品の製造方法)について説明する。図4は、実施形態に係る部品の製造方法を示すフローチャートである。
本実施形態では、ロボットハンド202を付け替えた後、ロボット200(ロボットハンド202)に、同じ作業を繰り返し行わせるものであるが、リンク216の回転軸C1に対してロボットハンド202の中心軸C2がずれて取り付けられていることがある。そのため、始めの作業時に、リンク216の回転軸C1に対するロボットハンド202の中心軸C2の位置ずれを算出する。ここで、カメラ500によりロボットハンド202のマークMKを撮像できるように、ロボットハンド202には何も把持させていないものとする。また、リンク216の回転軸C1とロボットハンド202の中心軸C2とが平行な状態で、ロボットハンド202がリンク216に取り付けられている。
まず、CPU401は、ロボットプログラムを入力する(S1)。このロボットプログラムは、組付作業を行うための動作を記述したものである。このロボットプログラムには、上述したように、ある教示点から別の教示点までの移動方法、つまり直線補間、円弧補間、関節補間等の補間方法が記述されている。特に、ロボットハンド202をカメラ500の前を通過させる移動方法は、直線補間で記述されているものとする。つまり、ロボットプログラムには、ある第1教示点からロボットハンド202にワークW1を取得させる位置の近傍の第2教示点へ直線移動するように記述されているものとする。CPU401は、ロボットプログラムに基づき、ロボットアーム201の軌道データを計算する(S2)。
CPU401は、補正する前の軌道データに基づき、ロボットハンド202のベース部220の座面がXY平面に対して平行な状態、つまり回転軸C1及び中心軸C2がXY平面に対して垂直となる状態にロボットアーム201の姿勢を初期設定する。
そして、CPU401は、補正する前の軌道データに基づき、ロボットアーム201を動作させて、ロボットハンド202をカメラ500に対して移動させる(S3:移動工程、移動処理)。具体的には、CPU401は、リンク216を回転停止させた回転停止状態で、ロボットハンド202がXY平面に対して水平な方向であってカメラ500の撮像範囲内を横切る方向(X軸方向)に移動するよう、ロボットアーム201の動作を開始する。つまり、ロボットハンド202の中心軸C2がXY平面に対して垂直となっている状態で、XY平面に対して水平なX軸方向へ、ロボットハンド202(リンク216)を移動させる。
リンク216の回転停止状態とは、ロボットアーム201の関節J6の角度が一定の基準角度(例えば0°)を維持した状態である。本実施形態では、CPU401は、カメラ500の撮像面(つまり、XY平面)に対してリンク216が水平方向に直線移動するように関節J6以外の関節J1〜J5を制御する。
CPU401は、ロボットハンド202(つまりマークMK)がカメラ500の撮像範囲内に入る前、又は撮像範囲内に在るときに、CPU301に撮像を開始するように指令を送る。CPU301は、この指令を受け、カメラ500に撮像を開始させる(S4:撮像工程、撮像処理)。つまり、CPU301は、カメラ500の撮像範囲内をロボットハンド202が通過中に、リンク216を回転停止状態で、カメラ500にロボットハンド202を撮像させる。カメラ500は、所定のフレームレートでCPU301に撮像画像を送信する。
次に、CPU401は、ロボットハンド202(つまりマークMK)がカメラ500の撮像範囲内を通過中に、リンク216を回転軸C1を中心に回転させる回転状態に切り替える。つまり、CPU401は、ロボットハンド202がカメラ500の撮像範囲内を通過中に、ロボットアーム201の関節J6の回転を開始させる(S5)。CPU301は、この回転状態でロボットハンド202をカメラ500に撮像させる。カメラ500は、所定のフレームレートでCPU301に撮像画像を送信する。
なお、このリンク216の回転動作は、組立動作を行わせるためのロボットプログラムには記述されていない動作である。つまり、繰り返し行う作業の始めの1回の作業においては、未だ、軌道データを補正する補正データを取得していないので、ステップS2で演算した補正前の軌道データに基づく動作に加えて、リンク216を回転動作させる。具体的には、リンク216の回転軸C1がX軸方向に直線移動するように動作させながら、回転軸C1を中心にリンク216を回転させて、カメラ500に撮像させる。
そして、CPU401は、カメラ500の撮像範囲内で、リンク216を1回転以上、好ましくは3回転以上回転させ、ロボットハンド202(マークMK)が撮像範囲から外れたときに、撮像を完了させるようCPU301に指令する。CPU301は、この指令を受け、カメラ500に撮像を完了させる(S6)。
撮像完了後、CPU401は、回転させていたリンク216の回転角度を、本来の軌道データの関節指令値に追従させる。
CPU301は、以上のステップS4〜S6の撮像処理により得られた複数の撮像画像から、マークMKの移動軌跡が写り込んだ1つの撮像画像を生成する。CPU301は、マークMKの移動軌跡が写り込んだ撮像画像をHDD304等の記憶装置に記録する。
図5(a)は、実施形態においてマークの移動軌跡が写り込んだ撮像画像の一例を示す模式図である。撮像画像IMには、リンク216の回転を停止させた回転停止状態E1のマークMKの部分軌跡T1と、リンク216を回転させた回転状態E2のマークMKの部分軌跡T2とからなる移動軌跡T0が写り込んでいる。
本実施形態では、部分軌跡T1,T2の撮像時には、リンク216のX軸方向への移動速度を一定としつつ、部分軌跡T1の撮像時には、リンク216の回転を停止させ、部分軌跡T2の撮像時には、リンク216の回転速度を一定とする。また、図5(a)には、リンク216の回転軸C1のX軸方向の移動速度と、部分軌跡T2を撮像する時のマークMKの速度とが同じ場合について図示している。
次にCPU301は、撮像画像中のロボットハンド202の中心軸C2の軌跡、即ちマークMKの移動軌跡T0に基づき、リンク216の回転軸C1に対するロボットハンド202の中心軸C2の位置ずれを算出する(S7:位置ずれ算出工程)。この位置ずれには、位置ずれ量と位置ずれ方向とが含まれている。
CPU301は、位置ずれのデータをCPU401に送り、CPU401は、CPU301から取得した位置ずれのデータをHDD404等の記憶装置に記録する(S8)。
CPU401は、位置ずれのデータを用いて、ステップS2で求めたロボットアーム201の軌道データを補正する(S9:補正工程、補正処理)。つまりCPU401は、位置ずれのデータを取得した後は、補正後の軌道データに基づきロボットアーム201を動作させる。よって、CPU401は、補正した軌道データに従ってロボットアーム201を動作させ、ロボットハンド202にワークW1を把持させ、ワークW1をワークW2に組付ける組立作業を行わせて組立部品を製造する(S10:作業工程、作業処理)。
以上ステップS1〜S9によりロボット制御方法、即ちステップS1〜S10により組立部品の製造方法が実行される。
以下、ステップS7の位置ずれ算出処理(位置ずれ算出工程)について具体的に説明する。なお、図5(a)では、ロボットハンド202がX軸方向へ直線移動し、関節J6の回転角度が基準角度(例えば0°)で停止している状態から回転している状態に移行している様子を撮像した撮像画像IMを図示している。軌跡T0は、マークMKの中心点の移動軌跡を示している。
まず、CPU301は、撮像画像中、回転軸C1の移動方向(X軸方向)と直交する方向(Y軸方向)に対する軌跡T0(部分軌跡T2)の振れ幅(2×R0)を求める。そして、CPU301は、振れ幅(2×R0)に基づき、リンク216の回転軸C1に対するロボットハンド202の中心軸C2の位置ずれ量R0を算出する。
具体的に説明すると、CPU301は、画像解析して、軌跡T0(部分軌跡T2)の上限のピークP1、P3、P5を通る線(破線)L1を演算する。また、CPU301は、画像解析して、軌跡T0(部分軌跡T2)の下限のピークP2、P4、P6を通る線(破線)L2を演算する。次に、CPU301は、直線L1と直線L2の中間線(一点鎖線)L3を演算する。ここで、直線L3は、関節J6の回転軸C1の軌跡を意味する。次に、CPU301は、直線L3の垂直方向(Y軸方向)の直線L1と直線L2との距離(2×R0)を算出し、これに1/2を乗じて、位置ずれ量R0を算出する。
また、CPU301は、直線L3(振れ幅(2×R0)の中心位置)に対する部分軌跡T1のオフセット量A0を求める。そして、CPU301は、位置ずれとして、オフセット量A0と位置ずれ量R0とに基づき、リンク216の回転軸C1に対するロボットハンド202の中心軸C2の位置ずれ方向(角度)θ0を算出する。
図5(b)は、実施形態において先端リンクの回転軸に対するロボットハンドの中心軸の位置ずれを説明するための図である。図5(a)及び図5(b)を参照しながら具体的に説明すると、まず、CPU301は、部分軌跡T1と直線L3との垂直方向(Y軸方向)の距離(オフセット量)A0を算出する。次に、CPU301は、関節J6の角度を基準角度(0°)の状態としているときのオフセット量A0と位置ずれ量R0とから、位置ずれ方向(位置ずれ角度)θ0=arcsin(A0/R0)を計算する。ここで、関節J6の角度は、リンク215に対するリンク216の角度である。部分軌跡T1を撮像したときの関節J6の角度を基準角度とする。よって、位置ずれ方向θ0は、基準角度に対する角度である。この演算により、部分軌跡T1を撮像したときのリンク216の回転軸C1に対するロボットハンド202の中心軸C2の位置ずれ方向(位置ずれ角度)θ0が求まる。
以上、本実施形態によれば、ロボットアーム201を動作させながら、軌跡T0からロボットハンド202の中心軸C2のずれ量R0とずれ角度θ0を高精度に求めることができる。これにより、組付作業中(部品の製造中)にロボット200(つまりロボットアーム201)の動作を止めることなく、ロボットハンド202の位置ずれを測定できるため、タクトタイムを削減することができる。
また、ロボットハンド202にマークMKを付与したので、特別な測定治具が不要である。更に、撮像画像IMからマークMKの軌跡T0のピーク間の距離を測定することにより、リンク216の回転精度の影響を受けることなく、位置ずれ量R0を高精度に測定できる。また、ずれ方向θ0についても、軌跡T0の測定結果に基づき、高精度に測定できる。
また、位置ずれ方向θ0を、撮像画像IMから部分軌跡T1のオフセット量A0と位置ずれ量R0とを求め、これらの値A0,R0により算出することができるので、演算負荷が小さく、速やかに軌道データを補正することができる。これにより、速やかにロボットアーム201の動作を補正でき、タクトタイムを削減できる。
また、軌道データを補正するようにしたので、ロボットアーム201にロボットハンド202を高精度に装着するための高価な部品も必要なく、コストダウンが可能である。
なお、以上の説明では、リンク216を回転させているときのマークMKの速度と、リンク216の回転軸C1のX軸方向の移動速度とが同じ場合について説明したが、これに限定するものでなく、互いの速度が異なっていてもよい。図6(a)及び図6(b)は、実施形態においてマークの移動軌跡が写り込んだ撮像画像の別の例を示す模式図である。
図6(a)では、リンク216を回転させているときのマークMKの速度が、リンク216の回転軸C1のX軸方向の移動速度よりも速い場合を図示している。図6(b)では、リンク216を回転させているときのマークMKの速度が、リンク216の回転軸C1のX軸方向の移動速度よりも遅い場合を図示している。いずれの場合であっても、撮像画像IMからピークP1〜P6を抽出することができ、位置ずれ量R0を求めることができる。
また、以上の説明では、ステップS3において、カメラ500の撮像面(XY平面)に対してリンク216が直線移動するように、ロボットアーム201を動作させる場合について説明したが、これに限定するものではない。ステップS3において、カメラ500の撮像面(XY平面)に対してリンク216が円弧移動(つまり円弧補間)するように、ロボットアーム201を動作させる場合であってもよい。例えば、関節J2〜J5を固定(停止)させ、関節J1を回転させるように動作させて、カメラ500にロボットハンド202を撮像させてもよい。
図7は、実施形態においてマークの移動軌跡が写り込んだ撮像画像の更に別の例を示す模式図である。図7では、リンク216を円弧移動させた場合の撮像画像IMを図示している。ステップS7において、CPU301は、図7に示す撮像画像IMから、マークMKの軌跡T0に基づき、リンク216の回転軸C1に対するロボットハンド202の中心軸C2の位置ずれを算出する。具体的に説明すると、CPU301は、画像解析して、軌跡T0(部分軌跡T2)の上限のピークP1、P3、P5を通る円弧線(破線)L1を演算する。また、CPU301は、画像解析して、軌跡T0(部分軌跡T2)の下限のピークP2、P4、P6を通る円弧線(破線)L2を演算する。この場合、上限及び下限のピークは、それぞれ3点以上必要である。したがって、リンク216を3回転以上させて部分軌跡T2を撮像する必要がある。
次に、CPU301は、円弧線L1と円弧線L2の中間線(一点鎖線)L3を演算する。ここで、円弧線L3は、関節J6の回転軸C1の軌跡を意味する。次に、CPU301は、円弧線L3に垂直な方向(半径方向)の直線L1と直線L2との距離(2×R0)を算出し、これに1/2を乗じて、位置ずれ量R0を算出する。
また、CPU301は、円弧線L3(振れ幅(2×R0)の半径方向の中心位置)に対する部分軌跡T1のオフセット量A0を求める。そして、CPU301は、位置ずれとして、オフセット量A0と位置ずれ量R0とに基づき、リンク216の回転軸C1に対するロボットハンド202の中心軸C2の位置ずれ方向θ0を算出する。このように、リンク216を円弧移動させてもロボットハンド202の位置ずれを高精度に求めることができる。
なお、本発明は、以上説明した実施形態に限定されるものではなく、本発明の技術的思想内で多くの変形が可能である。また、本発明の実施形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本発明の実施形態に記載されたものに限定されない。
上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
また、上述の実施形態では、先端リンク216が直線又は円弧移動する場合について説明したが、これに限定するものではない。直線移動及び円弧移動を組み合わせて動作する場合であってもよい。また、これらの移動方法に限らず、任意の動作を行ってもよく、その場合には、軌跡のピークから近似曲線を描くことで関節J6の中心の軌跡を求め、位置ずれ量と位置ずれ方向の計算を行ってもよい。
また、上述の実施形態では、先端リンク216を一定速度で移動させる場合について説明したが、これに限定するものではなく、移動速度が変化してもよい。また、先端リンク216の回転速度も一定の場合について説明したが、回転速度が変化してもよい。
また、上述の実施形態では、カメラ500によるロボットハンド202の撮像中に、リンク216を回転停止状態から回転状態に切り替えた場合について説明したが、これに限定するものではない。リンク216を回転状態から回転停止状態に切り替えてもよく、また、回転状態と回転停止状態とを交互に1回以上行ってもよい。
また、上述の実施形態では、ロボットアーム201が垂直多関節のロボットアームの場合について説明したが、これに限定するものではない。ロボットアーム201が、例えば、水平多関節のロボットアーム、パラレルリンクのロボットアーム、直交ロボット等、種々のロボットアームであってもよい。
また、上述の実施形態では、ロボットハンド202にマークMKが付与されている場合について説明したが、これに限定するものではなく、ロボットハンド202が把持する把持物にマークが付与されている場合であってもよい。この場合、ロボットハンド202の中心軸C2上にマークが位置するようにマークを把持物に形成しておけばよい。この場合、ロボットハンド202に把持物を精度よく把持させる必要がある。したがって、上述の実施形態のようにロボットハンド202にマークMKを付与する方が、簡便であり好ましい。
また、上述の実施形態では、ロボット200が行う作業として組付作業について説明したが、組付作業に限定するものではない。エンドエフェクタがツール、又はツールを把持したロボットハンドであって、ねじ止め作業や接着剤を塗布する作業等、種々の作業を行う場合であってもよい。この場合、ツールにマークが付与されていてもよい。
また、ロボットハンド202の中心軸上にマークMKが付与されている場合について説明したが、撮像画像上、ロボットハンドの部材に基づき、ロボットハンドの中心軸の位置の軌跡を求めることができれば、マークが付与されていない場合であってもよい。もちろん、マークが付与されている方が、演算負荷が小さいため好ましい。
また、上述の実施形態では、複数のコンピュータ(CPU)で制御部801が構成されている場合について説明したが、1つのコンピュータ(CPU)で制御部が構成されていてもよい。
また、上述の実施形態では、算出した位置ずれに基づき軌道データを補正する場合について説明したが、これに限定するものではなく、先端リンクに対するロボットハンドの位置ずれそのものを修正してもよい。この場合、先端リンクにロボットハンドをスライドさせるスライド機構を設け、スライド機構により位置ずれを解消させてもよい。
また、上述の実施形態では、組付作業等の作業を行うロボットプログラムにより作成した、補正前の軌道データに基づきロボットアーム201を動作させている最中に、撮像処理を行う場合について説明したが、これに限定するものではない。例えば、ロボットハンド202を撮像するためのロボットプログラムを別途作成しておき、このロボットプログラムにより作成した軌道データに基づきロボットアーム201を動作させている最中に、撮像処理を行ってもよい。
また、上述の実施形態では、ロボットハンド202を交換したときだけ位置ずれの演算を行う場合について説明したが、組付作業毎に毎回行ってもよい。
また、上述の実施形態では、回転停止状態においてもロボットハンド202の撮像を行う場合について説明したが、回転状態のみロボットハンド202の撮像を行ってもよい。この場合、ロボットハンド202の中心軸C2の位置ずれ方向(角度)は、軌跡の波形のピークにおける関節J6の関節指令値から求めることができる。
また、上述の実施形態では、カメラ500が所定のフレームレートで撮像を行う場合について説明したが、これに限定するものではない。ロボットハンド202(マークMK)を撮像する際に、シャッターを開状態に維持してマークMKの軌跡を撮像するようにしてもよい。
100…ロボット装置、201…ロボットアーム、202…ロボットハンド(エンドエフェクタ)、216…リンク(先端リンク)、500…カメラ(撮像装置)、801…制御部、C1…回転軸、C2…中心軸
Claims (13)
- 制御部が、エンドエフェクタが取り付けられた先端リンクを有するロボットアームの動作を制御するロボット制御方法であって、
前記制御部が、前記ロボットアームを動作させて、撮像範囲内の被写体を撮像する撮像装置に対して前記エンドエフェクタを移動させる移動工程と、
前記制御部が、前記エンドエフェクタが前記撮像範囲内を通過中に、前記先端リンクを回転軸を中心に回転させた回転状態で、前記撮像装置に前記エンドエフェクタを撮像させる撮像工程と、
前記制御部が、前記撮像工程にて得られた撮像画像中の前記エンドエフェクタの中心軸の軌跡に基づき、前記先端リンクの回転軸に対する前記エンドエフェクタの中心軸の位置ずれを算出する位置ずれ算出工程と、を備えたロボット制御方法。 - 前記制御部が、前記位置ずれ算出工程で算出した位置ずれで、前記ロボットアームの動作を規定する軌道データを補正する補正工程を更に備えた請求項1に記載のロボット制御方法。
- 前記位置ずれ算出工程では、前記制御部が、前記位置ずれとして、
前記撮像画像中、前記回転軸の移動方向と直交する方向に対する前記軌跡の振れ幅に基づき、前記先端リンクの回転軸に対する前記エンドエフェクタの中心軸の位置ずれ量を算出する請求項1又は2に記載のロボット制御方法。 - 前記撮像工程では、前記制御部が、更に、前記エンドエフェクタが前記撮像範囲内を通過中に、前記先端リンクを回転停止させた回転停止状態で、前記撮像装置に前記エンドエフェクタを撮像させ、
前記位置ずれとして、更に、
前記振れ幅の中心位置に対する、前記軌跡のうち前記停止状態で撮像した部分軌跡のオフセット量と、前記位置ずれ量とに基づき、前記先端リンクの回転軸に対する前記エンドエフェクタの中心軸の位置ずれ方向を算出する請求項3に記載のロボット制御方法。 - 前記移動工程では、前記制御部が、前記エンドエフェクタの中心軸が前記撮像装置の撮像面に対して垂直となっている状態で、前記エンドエフェクタが前記撮像装置の撮像面に対して水平に移動するように、前記ロボットアームを動作させる請求項1乃至4のいずれか1項に記載のロボット制御方法。
- 前記軌跡は、前記エンドエフェクタの中心軸上に位置するマークの移動軌跡である請求項1乃至5のいずれか1項に記載のロボット制御方法。
- 前記マークは、前記エンドエフェクタに付与されている請求項6に記載のロボット制御方法。
- 前記移動工程では、前記制御部が、前記撮像装置の撮像面に対して前記先端リンクが直線移動するように、前記ロボットアームを動作させる請求項1乃至7のいずれか1項に記載のロボット制御方法。
- 前記移動工程では、前記制御部が、前記撮像装置の撮像面に対して前記先端リンクが円弧移動するように、前記ロボットアームを動作させる請求項1乃至7のいずれか1項に記載のロボット制御方法。
- 制御部が、ロボットアームを動作させて、前記ロボットアームの先端リンクに取り付けられたエンドエフェクタを、撮像範囲内の被写体を撮像する撮像装置に対して移動させる移動工程と、
前記制御部が、前記エンドエフェクタが前記撮像範囲内を通過中に、前記先端リンクを回転軸を中心に回転させた回転状態で、前記撮像装置に前記エンドエフェクタを撮像させる撮像工程と、
前記制御部が、前記撮像工程にて得られた撮像画像中の前記エンドエフェクタの中心軸の軌跡に基づき、前記先端リンクの回転軸に対する前記エンドエフェクタの中心軸の位置ずれを算出する位置ずれ算出工程と、
前記制御部が、前記位置ずれ算出工程で算出した位置ずれで、前記ロボットアームの動作を規定する軌道データを補正する補正工程と、
前記制御部が、前記補正工程で補正した軌道データに従って前記ロボットアームを動作させ、前記エンドエフェクタに作業を行わせて部品を製造する作業工程と、を備えた部品の製造方法。 - 回転軸を中心に回転可能な先端リンクを有するロボットアームと、
前記先端リンクに取り付けられたエンドエフェクタと、
撮像範囲内の被写体を撮像する撮像装置と、
前記ロボットアームの動作を制御する制御部と、を備え、
前記制御部は、
前記ロボットアームを動作させて、前記撮像装置に対して前記エンドエフェクタを移動させる移動処理と、
前記エンドエフェクタが前記撮像範囲内を通過中に、前記先端リンクを回転軸を中心に回転させた回転状態で、前記撮像装置に前記エンドエフェクタを撮像させる撮像処理と、
前記撮像処理にて得られた撮像画像中の前記エンドエフェクタの中心軸の軌跡に基づき、前記先端リンクの回転軸に対する前記エンドエフェクタの中心軸の位置ずれを算出する位置ずれ算出処理と、を実行するロボット装置。 - コンピュータに、請求項1乃至9のいずれか1項に記載のロボット制御方法の各工程を実行させるためのプログラム。
- 請求項12に記載のプログラムが記録された、コンピュータが読み取り可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016004855A JP2017124468A (ja) | 2016-01-14 | 2016-01-14 | ロボット制御方法、部品の製造方法、ロボット装置、プログラム及び記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016004855A JP2017124468A (ja) | 2016-01-14 | 2016-01-14 | ロボット制御方法、部品の製造方法、ロボット装置、プログラム及び記録媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017124468A true JP2017124468A (ja) | 2017-07-20 |
Family
ID=59364448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016004855A Pending JP2017124468A (ja) | 2016-01-14 | 2016-01-14 | ロボット制御方法、部品の製造方法、ロボット装置、プログラム及び記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017124468A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109421047A (zh) * | 2017-08-22 | 2019-03-05 | 发那科株式会社 | 机器人系统 |
| JP2019118993A (ja) * | 2017-12-29 | 2019-07-22 | 富士通株式会社 | ロボット、自己診断プログラム、及び自己診断方法 |
| CN112720471A (zh) * | 2020-12-18 | 2021-04-30 | 希美埃(芜湖)机器人技术有限公司 | 基于机器人视觉实现家具行业的在线跟踪的自动喷涂方法 |
| CN113165186A (zh) * | 2018-09-12 | 2021-07-23 | 佳能株式会社 | 机器人系统及其控制装置和控制方法、摄像装置、控制程序和存储介质 |
| WO2022254613A1 (ja) * | 2021-06-02 | 2022-12-08 | 株式会社Fuji | カメラの位置ずれ補正方法およびロボット装置 |
-
2016
- 2016-01-14 JP JP2016004855A patent/JP2017124468A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109421047A (zh) * | 2017-08-22 | 2019-03-05 | 发那科株式会社 | 机器人系统 |
| JP2019038040A (ja) * | 2017-08-22 | 2019-03-14 | ファナック株式会社 | ロボットシステム |
| US10737384B2 (en) | 2017-08-22 | 2020-08-11 | Fanuc Corporation | Robot system |
| JP2019118993A (ja) * | 2017-12-29 | 2019-07-22 | 富士通株式会社 | ロボット、自己診断プログラム、及び自己診断方法 |
| CN113165186A (zh) * | 2018-09-12 | 2021-07-23 | 佳能株式会社 | 机器人系统及其控制装置和控制方法、摄像装置、控制程序和存储介质 |
| US11992960B2 (en) | 2018-09-12 | 2024-05-28 | Canon Kabushiki Kaisha | Robot system, control apparatus of robot system, control method of robot system, imaging apparatus, and storage medium |
| CN112720471A (zh) * | 2020-12-18 | 2021-04-30 | 希美埃(芜湖)机器人技术有限公司 | 基于机器人视觉实现家具行业的在线跟踪的自动喷涂方法 |
| WO2022254613A1 (ja) * | 2021-06-02 | 2022-12-08 | 株式会社Fuji | カメラの位置ずれ補正方法およびロボット装置 |
| JPWO2022254613A1 (ja) * | 2021-06-02 | 2022-12-08 | ||
| JP7744979B2 (ja) | 2021-06-02 | 2025-09-26 | 株式会社Fuji | カメラの位置ずれ補正方法およびロボット装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6351293B2 (ja) | ロボットシステム、および物品の製造方法 | |
| JP6963748B2 (ja) | ロボットシステム及びロボットシステムの制御方法 | |
| JP6468741B2 (ja) | ロボットシステム及びロボットシステムの校正方法 | |
| JP4759660B2 (ja) | ロボットアーム制御用の装置、方法、プログラム及び集積電子回路、並びに、組立ロボット | |
| JP6429473B2 (ja) | ロボットシステム、ロボットシステムの校正方法、プログラム、およびコンピュータ読み取り可能な記録媒体 | |
| US8306661B2 (en) | Method and system for establishing no-entry zone for robot | |
| JP2017124468A (ja) | ロボット制御方法、部品の製造方法、ロボット装置、プログラム及び記録媒体 | |
| JP6153316B2 (ja) | ロボットシステム及びロボットシステムの制御方法 | |
| JP4289619B2 (ja) | 多関節ロボットのツール位置補正方法 | |
| JP2003117861A (ja) | ロボットの位置補正システム | |
| JP2013049102A (ja) | ロボットの制御装置及びロボットの姿勢決定方法 | |
| JP7529815B2 (ja) | ロボットシステム及びワーク供給方法 | |
| WO2016151668A1 (ja) | ティーチング装置及び制御情報の生成方法 | |
| JP2018167334A (ja) | 教示装置および教示方法 | |
| JP4613955B2 (ja) | 回転軸線算出方法、プログラムの作成方法、動作方法およびロボット装置 | |
| JP4287788B2 (ja) | 自走式ロボットハンド | |
| JP2015223649A (ja) | ギヤ組み込みシステムおよびギヤ組み込み方法 | |
| JP2015000455A (ja) | ロボット装置及びロボット装置の制御方法 | |
| CN111819038A (zh) | 采用平行连杆机构的作业设备及其控制方法 | |
| JP2017127932A (ja) | ロボット装置、ロボット制御方法、部品の製造方法、プログラム及び記録媒体 | |
| WO2017175340A1 (ja) | 最適化装置及びそれを備えた垂直型多関節ロボット | |
| JP3328414B2 (ja) | ロボットハンドの姿勢制御装置 | |
| JP5521506B2 (ja) | ロボット | |
| JP2006297559A (ja) | キャリブレーションシステムおよびロボットのキャリブレーション方法 | |
| JP2016203282A (ja) | エンドエフェクタの姿勢変更機構を備えたロボット |