JP2017133780A - 加熱調理器 - Google Patents
加熱調理器 Download PDFInfo
- Publication number
- JP2017133780A JP2017133780A JP2016015228A JP2016015228A JP2017133780A JP 2017133780 A JP2017133780 A JP 2017133780A JP 2016015228 A JP2016015228 A JP 2016015228A JP 2016015228 A JP2016015228 A JP 2016015228A JP 2017133780 A JP2017133780 A JP 2017133780A
- Authority
- JP
- Japan
- Prior art keywords
- cooked
- weight
- heating
- state
- weight value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24C—DOMESTIC STOVES OR RANGES ; DETAILS OF DOMESTIC STOVES OR RANGES, OF GENERAL APPLICATION
- F24C7/00—Stoves or ranges heated by electric energy
- F24C7/08—Arrangement or mounting of control or safety devices
- F24C7/082—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination
- F24C7/083—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination on tops, hot plates
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05B—ELECTRIC HEATING; ELECTRIC LIGHT SOURCES NOT OTHERWISE PROVIDED FOR; CIRCUIT ARRANGEMENTS FOR ELECTRIC LIGHT SOURCES, IN GENERAL
- H05B6/00—Heating by electric, magnetic or electromagnetic fields
- H05B6/02—Induction heating
- H05B6/06—Control, e.g. of temperature, of power
- H05B6/062—Control, e.g. of temperature, of power for cooking plates or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24C—DOMESTIC STOVES OR RANGES ; DETAILS OF DOMESTIC STOVES OR RANGES, OF GENERAL APPLICATION
- F24C7/00—Stoves or ranges heated by electric energy
- F24C7/08—Arrangement or mounting of control or safety devices
- F24C7/082—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination
- F24C7/085—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination on baking ovens
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Induction Heating Cooking Devices (AREA)
- Electric Stoves And Ranges (AREA)
- Cookers (AREA)
Abstract
Description
被調理物を加熱する加熱手段と、
被調理物の重量を計測する重量検知手段と、
使用者が加熱する被調理物の種類を選択する選択部と、
前記選択部で選択された被調理物の種類に対応する情報を記憶した情報記憶部と、
前記重量検知手段で計測された重量検知結果および前記選択部で選択された被調理物の種類に基づき前記加熱手段を制御する制御手段と、を設け、
前記制御手段は、
前記重量検知手段で計測した被調理物の第一重量値と、
前記第一重量値を計測後における前記加熱手段により加熱時の前記重量検知手段で計測した被調理物の第二重量値と、
使用者が前記選択部で選択した被調理物の種類に対応する前記情報記憶部に記憶されている情報と、を比較し、
加熱中の被調理物の状態を推定するものである。
被調理物を加熱する加熱手段と、
被調理物の重量を計測する重量検知手段と、
使用者が加熱する被調理物の種類を選択する選択部と、
前記選択部で選択された被調理物の種類に対応する情報を記憶した情報記憶部と、
前記重量検知手段で計測された重量検知結果および前記選択部で選択された被調理物の種類に基づき前記加熱手段を制御する制御手段と、を設け、
前記制御手段は、
前記重量検知手段で計測した被調理物の第一重量値と、
前記第一重量値を計測後における前記加熱手段により加熱時の前記重量検知手段で計測した被調理物の第二重量値と、
使用者が前記選択部で選択した被調理物の種類に対応する前記情報記憶部に記憶されている情報と、を比較し、
加熱中の被調理物の状態を推定するものである。
被調理物の第一重量値は、
被調理物の加熱開始時、加熱開始から第一の所定時間到達時、および加熱開始から被調理物が第一の所定温度到達時のうちの少なくとも一方のタイミングにおいて重量検知手段で被調理物を計測した値とし、
被調理物の第二重量値は、
前記第一重量値を計測した時点から第二の所定時間到達時、および第一の所定温度と異なる加熱開始から被調理物が第二の所定温度到達時のうちの少なくとも一方のタイミングに
おいて前記重量検知手段で被調理物を計測した値とするものである。
調理中の被調理物の状態は、
被調理物の加熱側投影面積に対する実加熱接触面積の割合、被調理物の厚み、また、被調理物中の筋肉を形成するタンパク質と水分以外の比率の少なくともいずれか1つであるというものである。
情報記憶部に記憶されている情報は、
被調理物の種類に対応して被調理物の第一記憶重量値と、
所定の加熱経過時点での第二記憶重量値と、
前記第一記憶重量値と前記第二記憶重量値から推定した被調理物の記憶芯温値と、
を有するものである。
情報記憶部に記憶されている情報は、
被調理物の状態に対応して被調理物の第一記憶状態重量値と、
所定の加熱経過時点での第二記憶状態重量値と、
前記第一記憶状態重量値と前記第二記憶状態重量値から演算された重量変化率と、
前記第一記憶状態重量値と前記第二記憶状態重量値から推定した被調理物の記憶状態芯温値と、
を有するものである。
制御手段は、
推定された加熱中の被調理物の状態に対応して、情報記憶部に記憶された重量変化率となるよう加熱手段を制御するものである。
制御手段は、
推定された加熱中の被調理物の状態に対応して、情報記憶部に記憶された重量変化率となるよう加熱手段を制御し、所定の記憶状態芯温値に対応する第二記憶状態重量値と相比例した第二重量値に到達時に、前記加熱手段を停止する、あるいは所定の記憶状態芯温値を
報知することの少なくとも一方を実施するものである。
加熱調理器に操作表示手段を備え、
制御手段は、
推定された加熱中の被調理物の状態に対応して、情報記憶部に記憶された重量変化率となるよう加熱手段を制御し、前記操作表示手段に第二重量値、加熱開始前後で測定した第一重量値に対する第二重量値の割合、あるいは、第二記憶状態重量値から推定した被調理物の記憶状態芯温値の少なくとも一方の値を表示するものである。
制御手段は、
推定された加熱中の被調理物の状態に対応して、情報記憶部に記憶された重量変化率となるよう加熱手段を制御し、所定の記憶状態芯温値に対応する第二記憶状態重量値に到達時に、前記所定の記憶状態芯温値を変更すことができるものである。
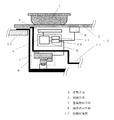
図1は、本発明の第1の実施の形態における加熱調理器の概略構成を示す断面図を示すものである。
9から加熱手段3である誘導加熱コイルへ供給する高周波電流を調節し、調理容器1を加熱する電力を変化させているもので、主にマイクロコンピュータとその周辺回路によって構成されている。
に伝達され、重量に換算された後に操作表示手段8に表示される。
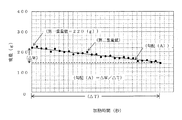
記憶することになる。第一重量値を記憶した時点から約1秒毎に被調理物の重量を第二重量値として記憶し、そして、第一重量値を記憶した時点から約30秒間の第一重量値と1秒毎の各第二重量値から、図7のように、制御手段4において、平均化した線形の相関線を演算し、単位時間当たりの重量変化率の勾配(A)を演算し導き出す。図7中のプロット点は、約1秒毎に検知した第二重量値の値であり、図中の一次曲線は、プロットされた点をより平均化した相関線であり、演算で得られた相関線の傾きを重量変化率の「勾配」として導き出している。
勾配(MX)との差分が所定の差分範囲として設定された設定値の範囲に収まると、第二重量値と第二記憶状態重量値とは、ほぼ一定の差分で推移する。その後、図11に示すように、第二重量値に相対する第二記憶状態重量値と相関する記憶状態芯温値が被調理物の芯温値とほぼ一致すると推定し、推定した被調理物の芯温値が設定した芯温値となった時点で、加熱中の被調理物の仕上がり状態は最適な状態になったと判断して、制御手段4は、加熱を止め、使用者に操作表示手段8を介して調理が完了したことを知らせる。
被調理物の状態を推定することで、その調理物の状態における内部伝熱状態に合わせた加熱条件に制御することができ、被調理物の重量変化から精度良く芯温の仕上がり状態を判断することができる。
よる加熱であってもよい。
本実施の形態2は、実施の形態1とほぼ同構成となるため、構成が異なる部分について説明する。
例で選択した勾配(M5)を表示)の値との差分を(式1)に基づき比較演算する。勾配(MX)との差分が所定の差分範囲として設定された設定値の範囲内に収まっていなければ、再度、加熱温度を制御して(式1)に基づき比較演算し、勾配(MX)と勾配(B)との差分が所定の差分範囲として設定された設定値の範囲に収まるまで、加熱制御を繰り返す。
この芯温値推定の比較演算を繰り返し、推定した芯温値が所定の芯温値となった時点で、加熱中の被調理物の仕上がり状態は最適な状態となったと判断して、加熱を止め、使用者に操作表示手段を介して、調理を完了したことを知らせる。
4 制御手段
7 重量検知手段
8 操作表示手段
17 情報記憶部
Claims (9)
- 被調理物を加熱する加熱手段と、
被調理物の重量を計測する重量検知手段と、
使用者が加熱する被調理物の種類を選択する選択部と、
前記選択部で選択された被調理物の種類に対応する情報を記憶した情報記憶部と、
前記重量検知手段で計測された重量検知結果および前記選択部で選択された被調理物の種類に基づき前記加熱手段を制御する制御手段と、を設け、
前記制御手段は、
前記重量検知手段で計測した被調理物の第一重量値と、
前記第一重量値を計測後における前記加熱手段により加熱時の前記重量検知手段で計測した被調理物の第二重量値と、
使用者が前記選択部で選択した被調理物の種類に対応する前記情報記憶部に記憶されている情報と、を比較し、
加熱中の被調理物の状態を推定することを特徴とした加熱調理器。 - 被調理物の第一重量値は、
被調理物の加熱開始時、加熱開始から第一の所定時間到達時、および加熱開始から被調理物が第一の所定温度到達時のうちの少なくとも一方のタイミングにおいて前記重量検知手段で被調理物を計測した値とし、
被調理物の第二重量値は、
前記第一重量値を計測した時点から第二の所定時間到達時、および第一の所定温度と異なる加熱開始から被調理物が第二の所定温度到達時のうちの少なくとも一方のタイミングにおいて前記重量検知手段で被調理物を計測した値とすることを特徴とした請求項1記載の加熱調理器。 - 調理中の被調理物の状態は、
被調理物の加熱側投影面積に対する実加熱接触面積の割合、被調理物の厚み、また、被調理物中の筋肉を形成するタンパク質と水分以外の比率の少なくともいずれか1つであることを特徴とした請求項1または2に記載の加熱調理器。 - 前記情報記憶部に記憶されている情報は、
被調理物の種類に対応して被調理物の第一記憶重量値と、
所定の加熱経過時点での第二記憶重量値と、
前記第一記憶重量値と前記第二記憶重量値から推定した被調理物の記憶芯温値と、
を有することを特徴とした請求項1〜3のいずれか1項に記載の加熱調理器。 - 前記情報記憶部に記憶されている情報は、
被調理物の状態に対応して被調理物の第一記憶状態重量値と、
所定の加熱経過時点での第二記憶状態重量値と、
前記第一記憶状態重量値と前記第二記憶状態重量値から演算された重量変化率と、
前記第一記憶状態重量値と前記第二記憶状態重量値から推定した被調理物の記憶状態芯温値と、
を有することを特徴とした請求項1〜4のいずれか1項に記載の加熱調理器。 - 前記制御手段は、
推定された加熱中の被調理物の状態に対応して、前記情報記憶部に記憶された前記重量変化率となるよう前記加熱手段を制御することを特徴とした請求項5に記載の加熱調理器。 - 前記制御手段は、
推定された加熱中の被調理物の状態に対応して、前記情報記憶部に記憶された前記重量変化率となるよう前記加熱手段を制御し、所定の記憶状態芯温値に対応する前記第二記憶状態重量値と相比例した前記第二重量値に到達時に、前記加熱手段を停止する、あるいは所定の記憶状態芯温値を報知することの少なくとも一方を実施することを特徴とした請求項5に記載の加熱調理器。 - 前記加熱調理器に操作表示手段を備え、
前記制御手段は、
推定された加熱中の被調理物の状態に対応して、前記情報記憶部に記憶された前記重量変化率となるよう前記加熱手段を制御し、前記操作表示手段に前記第二重量値、加熱開始前後で測定した前記第一重量値に対する前記第二重量値の割合、あるいは、前記第二記憶状態重量値から推定した被調理物の記憶状態芯温値の少なくとも一方の値を表示することを特徴とした請求項5に記載の加熱調理器。 - 前記制御手段は、
推定された加熱中の被調理物の状態に対応して、前記情報記憶部に記憶された前記重量変化率となるよう前記加熱手段を制御し、所定の記憶状態芯温値に対応する前記第二記憶状態重量値に到達時に、前記所定の記憶状態芯温値を変更可能とすることを特徴とした請求項5に記載の加熱調理器。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016015228A JP6484815B2 (ja) | 2016-01-29 | 2016-01-29 | 加熱調理器 |
| CN201780007565.4A CN108496042B (zh) | 2016-01-29 | 2017-01-16 | 加热烹调器 |
| EP17743992.4A EP3410015A4 (en) | 2016-01-29 | 2017-01-16 | HEATED COOKING APPARATUS |
| PCT/JP2017/001161 WO2017130761A1 (ja) | 2016-01-29 | 2017-01-16 | 加熱調理器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016015228A JP6484815B2 (ja) | 2016-01-29 | 2016-01-29 | 加熱調理器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017133780A true JP2017133780A (ja) | 2017-08-03 |
| JP6484815B2 JP6484815B2 (ja) | 2019-03-20 |
Family
ID=59397672
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016015228A Active JP6484815B2 (ja) | 2016-01-29 | 2016-01-29 | 加熱調理器 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3410015A4 (ja) |
| JP (1) | JP6484815B2 (ja) |
| CN (1) | CN108496042B (ja) |
| WO (1) | WO2017130761A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020169766A (ja) * | 2019-04-03 | 2020-10-15 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| JP2020183839A (ja) * | 2019-05-09 | 2020-11-12 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| JP2020186862A (ja) * | 2019-05-15 | 2020-11-19 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| WO2021091269A1 (ko) * | 2019-11-05 | 2021-05-14 | 삼성전자주식회사 | 유도 가열 장치 |
| CN113208445A (zh) * | 2021-03-31 | 2021-08-06 | 中山市翰林电器有限公司 | 智能加热控制方法、装置及加热设备 |
| JP2022007444A (ja) * | 2020-06-26 | 2022-01-13 | 東京瓦斯株式会社 | 調理判定の方法、システム、プログラム、記録媒体、および調理機器 |
| JP2022024505A (ja) * | 2020-07-28 | 2022-02-09 | 東京瓦斯株式会社 | 調理評価の方法、システム、プログラム、記録媒体、および調理機器 |
| KR102394234B1 (ko) * | 2021-10-07 | 2022-05-04 | (주)원팩토리 | 인덕션 레인지 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111102610B (zh) * | 2018-10-26 | 2021-07-20 | 佛山市顺德区美的电热电器制造有限公司 | 运行控制方法、装置、烹饪器具和计算机可读存储介质 |
| CN109798553B (zh) * | 2018-12-30 | 2021-02-02 | 佛山市顺德区美的洗涤电器制造有限公司 | 一种灶具及其防干烧控制方法、装置、设备和存储介质 |
| KR102327654B1 (ko) * | 2020-07-10 | 2021-11-17 | 박태순 | 요리 자동조리장치 및 그 조리방법 |
| WO2026022867A1 (en) * | 2024-07-23 | 2026-01-29 | De' Longhi Appliances S.R.L. | Method for cooking foodstuffs and corresponding apparatus |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05113220A (ja) * | 1991-10-21 | 1993-05-07 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH05113219A (ja) * | 1991-10-21 | 1993-05-07 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH06241463A (ja) * | 1993-02-22 | 1994-08-30 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH08112066A (ja) * | 1994-10-17 | 1996-05-07 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
| JPH11132468A (ja) * | 1997-10-24 | 1999-05-21 | Toshiba Corp | 加熱調理器 |
| JP2004245540A (ja) * | 2003-02-17 | 2004-09-02 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
| JP2007218545A (ja) * | 2006-02-20 | 2007-08-30 | Hitachi Appliances Inc | 加熱調理器 |
| JP2007327700A (ja) * | 2006-06-08 | 2007-12-20 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6349404U (ja) * | 1986-09-16 | 1988-04-04 | ||
| KR950009117A (ko) * | 1993-09-20 | 1995-04-21 | 야마다 로꾸이찌 | 중량검출장치 |
| US5893051A (en) * | 1994-09-27 | 1999-04-06 | Matsushita Electric Industrial Co., Ltd. | Method of estimating temperature inside material to be cooked and cooking apparatus for effecting same |
| TWI428545B (zh) * | 2010-10-01 | 2014-03-01 | Yu Chieh Lin | 防止燒乾之爐具及其方法 |
| CN106455863B (zh) * | 2014-06-06 | 2020-07-31 | 皇家飞利浦有限公司 | 基于预测食物核心温度的烹饪食品的烹饪装置和方法 |
-
2016
- 2016-01-29 JP JP2016015228A patent/JP6484815B2/ja active Active
-
2017
- 2017-01-16 WO PCT/JP2017/001161 patent/WO2017130761A1/ja not_active Ceased
- 2017-01-16 CN CN201780007565.4A patent/CN108496042B/zh active Active
- 2017-01-16 EP EP17743992.4A patent/EP3410015A4/en not_active Withdrawn
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05113220A (ja) * | 1991-10-21 | 1993-05-07 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH05113219A (ja) * | 1991-10-21 | 1993-05-07 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH06241463A (ja) * | 1993-02-22 | 1994-08-30 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH08112066A (ja) * | 1994-10-17 | 1996-05-07 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
| JPH11132468A (ja) * | 1997-10-24 | 1999-05-21 | Toshiba Corp | 加熱調理器 |
| JP2004245540A (ja) * | 2003-02-17 | 2004-09-02 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
| JP2007218545A (ja) * | 2006-02-20 | 2007-08-30 | Hitachi Appliances Inc | 加熱調理器 |
| JP2007327700A (ja) * | 2006-06-08 | 2007-12-20 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020169766A (ja) * | 2019-04-03 | 2020-10-15 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| JP7212572B2 (ja) | 2019-04-03 | 2023-01-25 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| JP2020183839A (ja) * | 2019-05-09 | 2020-11-12 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| JP2020186862A (ja) * | 2019-05-15 | 2020-11-19 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| WO2021091269A1 (ko) * | 2019-11-05 | 2021-05-14 | 삼성전자주식회사 | 유도 가열 장치 |
| JP2022007444A (ja) * | 2020-06-26 | 2022-01-13 | 東京瓦斯株式会社 | 調理判定の方法、システム、プログラム、記録媒体、および調理機器 |
| JP2022024505A (ja) * | 2020-07-28 | 2022-02-09 | 東京瓦斯株式会社 | 調理評価の方法、システム、プログラム、記録媒体、および調理機器 |
| CN113208445A (zh) * | 2021-03-31 | 2021-08-06 | 中山市翰林电器有限公司 | 智能加热控制方法、装置及加热设备 |
| KR102394234B1 (ko) * | 2021-10-07 | 2022-05-04 | (주)원팩토리 | 인덕션 레인지 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3410015A1 (en) | 2018-12-05 |
| CN108496042A (zh) | 2018-09-04 |
| WO2017130761A1 (ja) | 2017-08-03 |
| EP3410015A4 (en) | 2019-01-16 |
| CN108496042B (zh) | 2019-12-10 |
| JP6484815B2 (ja) | 2019-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6484815B2 (ja) | 加熱調理器 | |
| CN106647392B (zh) | 一种烹饪锅具的测温方法、烹饪锅具和烹饪系统 | |
| CN104080381B (zh) | 烹饪食物的方法,和实施所述方法的装置 | |
| EP1918643A2 (en) | Cooking apparatus and method of displaying caloric information | |
| EP3131411B1 (en) | Method and apparatus for controlling a cooking process of food | |
| US10412789B2 (en) | Method for regulating a cooking process | |
| US20160258634A1 (en) | Method for Operating a Cooking Device, and Such a Cooking Device for Performing the Method | |
| CN109793421B (zh) | 烹饪控制方法及烹饪控制装置、存储介质及压力烹饪器具 | |
| CN102763051A (zh) | 用于控制烹饪过程的方法 | |
| US20200281391A1 (en) | Sous-vide oven mode with probe | |
| JP5174089B2 (ja) | 加熱調理器 | |
| CN109237531A (zh) | 防干烧的控制方法和防干烧系统 | |
| JP7300648B2 (ja) | 加熱調理器 | |
| JP2008034228A (ja) | 加熱調理器 | |
| CN106308465B (zh) | 电烹饪器的烹饪类型的识别方法和电烹饪器 | |
| JP2019200002A (ja) | 加熱調理装置 | |
| JP4241711B2 (ja) | 加熱調理器 | |
| JP5125244B2 (ja) | 加熱調理器およびそのプログラム | |
| JP2019216012A (ja) | 加熱調理器 | |
| JP5889130B2 (ja) | 誘導加熱調理器およびその制御方法 | |
| CN109691859A (zh) | 烹饪器具及其保温性能自动调节方法、装置 | |
| JP3636185B2 (ja) | 誘導加熱調理器 | |
| JP3888208B2 (ja) | 誘導加熱調理器 | |
| CN112120524B (zh) | 烹饪器具、加热的控制方法和装置 | |
| KR20110096201A (ko) | 자동온도조절이 가능한 조리기 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190121 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6484815 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |