JP2017138887A - 車線合流時の自動運転継続可否判断装置およびその自動運転継続可否判断方法 - Google Patents
車線合流時の自動運転継続可否判断装置およびその自動運転継続可否判断方法 Download PDFInfo
- Publication number
- JP2017138887A JP2017138887A JP2016020750A JP2016020750A JP2017138887A JP 2017138887 A JP2017138887 A JP 2017138887A JP 2016020750 A JP2016020750 A JP 2016020750A JP 2016020750 A JP2016020750 A JP 2016020750A JP 2017138887 A JP2017138887 A JP 2017138887A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- driving
- automatic driving
- motorcycle
- main line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】自動運転車両の本線合流時に、自動二輪車の動きを活用したり、自動二輪車の協力を得て、自動運転を継続したままの状態で本線合流が円滑かつスムーズに図れる車線合流時の自動運転継続可否判断装置を提供する。【解決手段】自動運転車両60の走行を自動運転制御により支援し、車車間通信装置を備えた自動運転支援システム10を有し、自動運転車両60の先方を車車間通信装置を備えた自動二輪車が、本線への合流地点に向って所定の車間距離を保持しながら走行する場合の自動運転車両60の車線合流時の自動運転継続可否判断装置である。自動運転車両60は、合流地点での自動運転継続可否を、自動二輪車63Aが本線上の走行車両Aに与える走行車両Aの走行環境変化を監視し、自動運転車両60は、本線上の走行車両Aとの間で所定の車線合流条件を満たした場合に、自動運転の継続を実行する。【選択図】図3
Description
本発明は、車両の自動運転制御走行を支援する技術に係り、特に、自動運転車両の車線合流時の自動運転継続可否判断技術に関する。
現在、公共の道路を走行する自動運転車両は市販されていないが、自動運転車両は人為ミスによる事故ゼロ車両であり、濃霧等で周辺視認が困難な環境下でも安全に走行運転させることができるメリットがある。
ここに、自動運転車両とは、レーダ、レーザ光を用いたリモートセンシング技術であるLIDER、GPS、カメラ等で周囲や位置情報等をセンシングして、人工知能(AI)技術や制御技術を駆使し、行き先の指定により、人に代って自ら安全に運転する自動車をいう。
ところで、対象車両である自車が自動運転車両であるが、手動運転にも切替可能な車両が開発されている。自車が自動運転車両の場合、一般道路から高速道路に合流しようとしたり、高速道路のジャンクション(JCT)等である高速道路から別の高速道路に合流する(以下、本線合流という)際、自動運転(制御)を継続したままの車線合流に困難性を伴うことがある。
しかし、自車が自動運転車両である場合、本線合流の際にもユーザの運転操作による手動運転に切り替えることなく、自動運転状態を維持したまま本線合流が行なわれることへの期待がある。自動運転では手動運転と比べて合流判断が難しく、自動運転を継続したままで本線への合流に困難性を伴うことが多い。このことから、自動運転制御で走行させることが難しい区間ではユーザの運転操作による手動運転への引継(切替)が行なわれて、手動運転される自動運転支援技術がある(特許文献1参照)。
一方、自動二輪車は自動運転が困難であり、一般的にはユーザの運転操作による手動運転車両である。
特許文献1の自動運転支援技術では、車両が走行経路を走行する際、自動運転制御で走行を行なわせることが難しい区間では、ユーザの運転操作による手動運転への切替(引継)が行なわれて、手動運転に切り替えられる。本線合流部で自動運転が困難である区間とナビゲーションECU(Electronic Control Unit)が判断した場合には、車両はユーザの運転操作による手動運転に切り替えられて本線に合流されるため、ユーザによる車両運転操作への負担が大きくなったり、例えば、時速80kmでの本線合流を想定した場合では、加速合流区間の設計標準値を高速道路公社では210m程度としていることから、200m程度以下の短区間での本線合流では、自動運転制御での本線合流が困難となる等の課題があった。
また、自車の自動運転車両の前方および後方の少なくとも一方に自動二輪車が走行しており、自動運転車両と自動二輪車が共に本線に合流しようとする場合、本線合流の困難性が一層大きくなる。自車の自動運転車両が自動運転を保ったまま本線合流が図れるように、自動運転車両と自動二輪車とが本線合流する際に本線合流が円滑かつスムーズに行なわれ、両車両の安全性を向上させるために、自動二輪車の動き(行動)を利用したり、活用する発想や着想は先行技術文献には存在しない。
本発明は、上述した事情を考慮してなされたもので、自動運転車両の本線合流の際に、自動二輪車の動きを活用したり、自動二輪車の協力を得て、自動運転を継続したままの状態で本線合流が円滑かつスムーズに行なわれるようにした車線合流時の自動運転継続可否判断装置およびその自動運転継続可否判断方法を提供することを目的とする。
本発明の他の目的は、自動運転車両の本線合流の際に、合流先の本線走行車両に、自動二輪車を自動運転車両の一種の露払い車両として利用し、自動運転車両と自動二輪車両とを一群の仮想集団として認識させ、自動運転車両と自動二輪車との本線合流を円滑かつスムーズに行なって、本線合流の際の予防安全効果を向上させた車線合流時の自動運転継続可否判断装置およびその自動運転継続可否判断方法を提供することにある。
本発明は、上述した目的を達成するために、自動運転車両の走行を自動運転制御により支援し、車車間通信装置を備えた自動運転支援システムを有し、前記自動運転車両の先方を車車間通信装置を備えた自動二輪車が、本線への合流地点に向って所定の車間距離を保持しながら走行する場合の前記自動運転車両の車線合流時の自動運転継続可否判断装置であって、前記自動運転車両は、前記合流地点での自動運転継続可否を、前記自動二輪車が前記本線上の走行車両に与える前記走行車両の走行環境変化を監視し、前記自動運転車両は、前記本線上の走行車両との間で所定の車線合流条件を満たした場合に、自動運転の継続を実行するように設定されたことを特徴とする車線合流時の自動運転継続可否判断装置を提供するものである。
また、本発明は、上述した目的を達成するために、自動運転支援システムは、自動運転車両の走行を自動運転制御により支援するステップと、前記自動運転車両の先方を自動二輪車が、本線上への合流地点に向って所定の車間距離を保持しながら走行する場合、自動運転継続可否制御装置が本線合流時の自動運転継続可否を判断するステップと、前記自動運転車両は、前記合流地点での自動運転継続可否を、前記自動二輪車が前記本線上の走行車両に与える前記走行車両の走行環境変化を監視するステップと、前記自動運転車両は、前記本線上の走行車両との間で所定の車線合流条件を満たした場合に、自動運転継続を実行するステップとを有することを特徴とする車線合流時の自動運転継続可否判断方法を提供する。
本発明は、自動運転車両の本線への合流の際に自動二輪車の動きを活用したり、自動二輪車の協力を得て、自動運転を継続したままの状態で本線合流が円滑かつスムーズに行なわれるようにしたものである。
以下、本発明に係る実施の形態を、添付図面を参照して説明する。
図1は、自動運転を実施する車両の自動運転支援システム10の構成を示すブロック図である。自動運転支援システム10は、自車の自動運転車両に搭載され、自動運転車両が自動で運行管理される自動運行システムである。
自車の自動運転車両は、ユーザの運転操作に基づいて走行する手動運転走行に加えて、ユーザの運転操作によらずに、予め設定された予定経路に沿って車両が自動運転制御により走行が可能なものである。
自車の自動運転車両では、自動運転支援システム10に車両の走行案内を行ない、ユーザが所望の目的地に到着できるように案内するナビゲーション装置11と、ナビゲーション装置11が搭載された車両の制御を行なう車両制御ECU(Electronic Control Unit)12とを備えている。
自動運転車両では、自動運転支援システム10に備えられるナビゲーション装置11により、車両の現在位置、車両が走行する車線および周辺の他車両の位置や道路状況を随時検出し、車両制御ECU12によって予め設定された予定経路に沿って走行するように、ステアリング、駆動源、ブレーキ等の車両制御が自動的に行なわれる。
ナビゲーション装置11は、GPS受信機等により、自車の現在位置が検出され、その現在位置に対応する地図データをDVD−ROMやHDD等の記録媒体またはネットワークを通じて取得し、液晶モニタ等の表示手段に表示することが可能な装置である。
ナビゲーション装置11は、車両の現在位置を検出する現在位置検出手段13と、地図データ等の各種データが記録されたデータ記録手段14と、入力された情報に基づいて各種の演算処理を行なうナビゲーションECU(Electronic Control Unit)15と、ユーザからの操作により入力される操作手段16と、車両の走行中に音声により情報管理や駐車等の通信指示情報を出力する音声認識システム17、ユーザに対して車両周辺の地図やナビゲーション装置11で設定された案内経路(車両の走行予定経路)に関する情報等を表示する液晶ディスプレイ等の表示手段18と、案内経路を音声ガイダンスするスピーカ19と、記録媒体であるDVDを読み取るDVDドライブ20と、自動車に関する種々の情報を、VICS(登録商標:Vehicle information and Communication System)センタやテレマティクスセンタとの間で通信を行なう通信モジュールとしてのテレマティクス21等とを有する。
ナビゲーションECU15は、ナビゲーション装置11の全体制御を行なう電子制御ユニットである。このナビゲーションECU15には、車両の走行をアシストし、走行案内する各種処理設定手段の処理アルゴリズムが納められている。例えば、制御内容設定手段として、車両の自動運転制御を行なう処理アルゴリズムが設定されている。
ナビゲーションECU15は、演算装置および制御装置としてのCPU23と、このCPU23が各種演算処理を行なうに当って、ワーキングメモリとして経路データが記録されるRAM24と、自動運転制御用の処理プログラムが記録されたROM25と、ROM25から読み出される処理プログラムが記録されたフラッシュメモリ26等との内部メモリ装置を備えている。
また、ナビゲーション装置11を構成する現在位置検出手段13は、GPS送・受信機27、車速センサ28、ステアリングセンサ29およびジャイロセンサ30等からなり、車両の現在位置、方位、車両の走行速度、現在時刻等を検出できる。車速センサ28は、車両の移動速度や車速を検出するセンサであり、その検出信号はナビゲーションECU15に出力される。ナビゲーションECU15は、車速センサ28からのセンサ信号に基づき、車両の駆動輪の回転速度や移動距離を算出している。
さらに、データ記録手段14は、図示しない外部記録媒体としてのハードディスクに記録された地図情報DB(データベース)33や、ハードディスクに所要のデータを書き込むドライバ等の記録ヘッド(図示せず)を備えている。地図情報DB33は、例えば経路の探索や変更に係る処理に用いられる探索データ34、道路(リンク)に関するリンクデータ35、ノード点に関するノードデータ36、地図の表示に関する地図表示データ、各交差点に関する交差点データ等が記憶された記憶手段である。地図情報DB33は、外部のサーバに格納させ、ナビゲーション装置11が通信により取得する構成としてもよい。
探索データ34としては、車両の現在位置(出発地)から所要の目的地までの経路を探索する経路探索処理に用いられる各種データが記録されている。
一方、ナビゲーションECU15に操作信号を入力する操作手段16は、車両の走行開始地点(出発地)から走行終了地点の目的地を入力する際に操作され、各種のキー、ボタン等の複数の操作スイッチ(図示せず)から構成される。ナビゲーションECU15は各操作スイッチの操作信号に基づき、対応する各種の動作が行なわれるように制御される。
また、音声認識システム17は、車両の走行中に様々な情報管理や目的地変更の音声指示、問合せ内容の確認を音声にて行なうスマートフォンやクラウドコンピューティング等の音声入力手段である。
表示手段18は、道路を含む地図情報、交通情報、操作案内、操作メニュー、案内経路に沿った案内情報、ニュース、天気予報、テレビ番組等が液晶ディスプレイにて表示される。
さらに、スピーカ19は、ナビゲーションECU15からの指示に基づいて案内経路に沿った走行を案内したり、必要に応じ名所、旧跡を音声にて案内する音声ガイダンスや案内経路に沿った目的地までの交差情報の音声案内を出力している。
DVDドライブ20は、DVDやCD等の記録媒体に記録されたデータを読取り可能なドライブである。読み取ったデータに基づいて音楽や映像の画質、地図情報DB33の更新等が行なわれる。
テレマティクス21は、交通情報センタ、例えばVICSセンタやテレマティクスセンタから送信された交通情報や天候情報等を受信するための通信モジュールである。本実施例におけるテレマティクス21では、車車間通信を行なう車車間通信装置や路側通信機との間で路車間通信を行なう路車間通信装置も備えている。
テレマティクス21は、車両の走行状況をテレマティクスセンタやVICSセンタ等の外部センタと通信可能で、渋滞を避けたルートの案内や、事故等のトラブル発生時に救急センタへ自動発信する通信機能のように、自車の自動運転車両が外部の社会システムと繋がりながら走行するようになっている。
一方、自動運転支援システム10は、ナビゲーション装置11が搭載された車両に対して各種の車両制御を行なう車両制御ECU(Electronic Control Unit)12が設けられている。車両制御ECU12は、ナビゲーション装置11のナビゲーションECU15と双方向通信可能に接続されている。車両制御ECU12とナビゲーションECU15とは、車両の運転制御を行なう電子制御ユニットであり、マイコン等のコンピュータで構成される。車両制御ECU12には、ステアリング、アクセルおよびブレーキ等の車両の駆動制御部40,41,42が備えられる。ステアリング駆動制御部40は、車両のステアリング操作を行なうステアリング装置43を駆動制御しており、アクセル駆動制御部41は、エンジンやモータ等の駆動源である駆動装置44を駆動制御している。ブレーキ駆動制御部42は、車両の制動装置45を駆動制御している。
ステアリング装置43は、道路の車線に沿った車両の走行を維持するレーンキーピングアシスト(車線維持支援システム)47と、車両を駐車位置に向けて自動的にハンドル操作を行なうインテリジェントパーキングアシスト48等とを備える。ステアリング装置43には、走行中の道路の白線や黄線等の車線をカメラが認識し、車線維持支援システムであるレーンキーピングアシスト47により、車線からのはみ出し走行を防止するシステムを備えている。レーンキーピングアシスト47は、車両が車線からはみ出しそうになると警報ブザーやハンドル振動等で注意を喚起したり、さらに、レーダクルーズコントロール作動時には、車線に沿った車両走行に戻るようにステアリング操作を自動的にサポートしている。
インテリジェントパーキングアシスト48は、フロント、リア、両側サイドミラーに、例えば4台(または6台)車外カメラからの映像を変換して得られるトップビューを見て車両の駐車位置を指定すると、この駐車位置に向けて自動でハンドル操作が行なわれるシステムである。
また、車両制御ECU12のアクセル駆動制御部41は、車両の走行をコントロールする駆動装置44を駆動制御している。駆動装置44には、例えば車間距離制御クルーズコントロール50や、車両事故等の異常事態を未然に防ぐ安全装置であるトラクションコントロール(TRC)51および横滑り防止装置(ESC:Electronic Stability Control)52等が備えられる。車間距離制御クルーズコントロール50は、ミリ波レーダユニット(後述する)により先行車両と走行レーン(車線)をセンシングして判断し、設定車両速度内で車間距離を維持しながら追従走行するシステムである。トラクションコントロール51は、水溜りや雪道等の滑り易い路面での発進や急加速時に、タイヤと路面状態を常にセンシングして、タイヤの空転を防止するように、ブレーキおよび駆動装置の出力を防止するものである。横滑り防止装置52は、車両個々のブレーキとエンジン出力を自動的に制御して車両を安定走行させるシステムである。
さらに、車両制御ECU12のブレーキ駆動制御部42は、制動装置45を作動制御して車両の走行作動を停止させるものである。制動装置45は、車両の衝突が不可避のとき、自動的にブレーキをかけて車両被害の軽減を図る衝突被害軽減ブレーキ53が備えられる。衝突被害軽減ブレーキ53は、カメラやレーダがセンシングした情報を車両制御ECU12が入力して、ブレーキ駆動制御部42により制動装置45をブレーキ作動させる一方、前方走行車両への接近や障害物を検知すると、音声やランプで警告を発し、衝突が不可避と判断すると、自動的にブレーキをかけて被害軽減を図るものである。
他方、車両に搭載された車両制御ECU12には撮像手段55で撮像された映像信号が入力される。この撮像手段55には、車両に設置された車外カメラ56、ミリ波レーダ57や各種センサが接続されている。車外カメラ56は、例えばCCD等の固体撮像素子を用いたカメラで構成され、車両のフロントバンパ、リア部、サイドミラーの両側に4台(あるいは6台)取り付けられる。これら車外カメラ56により、車両周囲の状況を把握する一方、各カメラが捉えた映像を変換、合成することにより、トップビューが作成される。このトップビューにて車両の周囲情報が把握され、周囲との安全確認の向上を図ることができる。
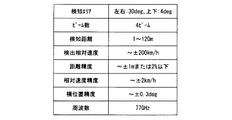
また、ミリ波レーダ57は、ミリ波帯の電波(電磁波)を用いた車載レーダ機器(ユニット)であり、ミリ波レーダ57は、波長がミリメートルオーダ(1mm〜10mm)で、周波数が30GHz〜300GHzのミリ波イメージング技術を、歩行者、車両、車線認識、標識等の認識技術に適用した車載レーダユニットである。ミリ波レーダ57は、車両のフロントバンパやリア部に車外カメラと同様にして設けられる。
ミリ波レーダ57は、ミリ波帯の電波(電磁波)を用いた車載レーダ機器であり、耐天候性(雨、雪、霧等)や、夜間、逆光等の悪環境下の検知性能が画像センサやレーザレーダセンサより格段に優れている。ミリ波レーダ57は、例えば77GHz帯FM−CW(Frequency Modulated−Continuous Wave)方式を採用したものは、車両や歩行者の相対距離および相対速度を高精度で算出することができる。このミリ波レーダ57の主な仕様例を図2に示す。
さらに、車両の各種運転制御を行なう車両制御ECU12には、自動運転スイッチや自動運転制御ボタン、手動運転スイッチや手動運転切替ボタン等の車両に搭載された各種操作ボタン58が接続されている。これらの各種操作ボタン58の中から所望の運転態様を選択して押圧操作することにより、自車の自動運転車両は自動運転制御が選択されて自動運転されたり、また、必要に応じ手動運転スイッチを選択して手動運転切替ボタンを押圧操作することで、車両は、ユーザの手動操作による手動運転に切り替えられる。
[高速道路合流対応]
自車は手動運転に切替可能な自動運転車両である。この自車の自動運転車両は図3に符号60で示すように、自動車専用道路である高速道路61のランプ62から高速道路61の本線に合流しようとする場合、自動運転車両60が自動運転していると、自動運転を継続させた状態で本線合流を図りたい。一般に、自車が自動運転車両60の場合、高速道路61に対する本線合流は合流判断が難しく、自動運転の継続には困難性を伴うことが多い。本実施形態は、できるだけ手動運転に切り替えることなく、自動運転を維持したまま、本線合流を図る場合に好適に適用される。
自車は手動運転に切替可能な自動運転車両である。この自車の自動運転車両は図3に符号60で示すように、自動車専用道路である高速道路61のランプ62から高速道路61の本線に合流しようとする場合、自動運転車両60が自動運転していると、自動運転を継続させた状態で本線合流を図りたい。一般に、自車が自動運転車両60の場合、高速道路61に対する本線合流は合流判断が難しく、自動運転の継続には困難性を伴うことが多い。本実施形態は、できるだけ手動運転に切り替えることなく、自動運転を維持したまま、本線合流を図る場合に好適に適用される。
その際、自動二輪車63は、一般的には手動運転(ユーザ運転)車両である。本実施形態では、自車の自動運転車両60の本線合流の途中に、自動二輪車63,63Aが存在する場合、自動二輪車63,63Aの動きを活用したり、あるいは自動二輪車63,63Aの協力を得て、自動運転状態を維持した状態で本線合流を図るのに好適に用いられる。
なお、高速道路61の本線上の走行車線(例えば下り車線)には複数の走行車両A,Bおよび自動二輪車C,Dが走行しており、対向車線(例えば上り車線)にも複数の走行車両E,Fが走行している。高速道路61は中央分離帯64で上下の車線に分離され、走行車線は例えば片側2車線が形成されている。
一般に、自動二輪車63(63A)や自動運転車両60が高速道路61の本線に合流する際には、本線合流点の上流側に位置する直近の走行車両Aの動きに変化(車線変更や制動操作)が生じる可能性が発生する。自動二輪車63Aの後続の自動運転車両60は、本線上の走行車両Aの走行環境変化(状況変化)を利用すれば、自動運転車両60が自動運転を継続したまま、本線にスムーズに合流できる可能性が大きくなる。本実施形態では、自動運転車両60の本線合流を、自動二輪車63Aを露払い車両として自動運転車両60の先導役として活用し、自動運転車両60や自動二輪車63A(63)の本線合流のスムーズ性を向上させたものである。
また、一般に、自動二輪車63A(63)は、四輪車両に較べて小柄である。本線上の走行車両Aが自動運転車両である場合、レーダや撮像手段での車両認識において、自動二輪車63A(63)は小型車両である分、一般的には、四輪車両に較べて車両認識上不利となる。
本実施形態は、自車の自動運転車両60が本線合流を行なう際に、同じく本線合流を目指す自動二輪車63A(63)が存在する場合、自動二輪車63A(63)を露払い車両として自車の先導役として活用したり、自動二輪車63A(63)の協力を得て、自動二輪車63A(63)と自動運転車両60とが一群の仮想集団65として、本線上を走行する走行車両Aが車両認識するように、本線上の走行車両Aからの車両認識性を向上させることができる。
本実施形態では、高速道路61の本線合流を目指す自動二輪車63A(63)が存在する場合において、自車の自動運転車両60が本線に合流する際、自動二輪車63A(63)を露払い車両として自車の先導役として活用し、あるいは協力を得て、自動運転車両60が自動運転を継続したまま、高速道路61の本線合流がスムーズに行なわれるように配慮したものである。
その際、高速道路61に本線合流される自車の自動運転車両60と自動二輪車63A(63)との間には、ブルートゥース(登録商標)等の音声による車車間通信装置で車車間通信ができるように構成されている。自動運転車両60には、車車間通信ができるテレマティクス21が、ナビゲーションECU15に接続されており、このテレマティクス21の通信モジュールにより自動二輪車63A(63)と車車間通信可能に構成されている。自動運転車両60の車車間通信装置は、路車間通信も可能な通信モジュールで構成される。自動運転車両60の通信モジュールはナビゲーションECU15およびテレマティクス21、スピーカ19で構成され、自動二輪車63A(63)の車車間通信装置は、例えばヘルメットに備えられるブルートゥース等の通信モジュールで構成される。
また、自車の自動運転車両60は、図3に示すように、高速道路61に本線合流する入線路上の自動運転車両60の前後に、少なくともいずれか一方に自動二輪車63A(63)が走行している場合を対象とする。このとき、本線上を走行する合流点近くの走行車両Aは、手動運転車両でも、自動運転車両であってもよい。
そして、高速道路61の本線上の合流点に向う自車の自動運転車両60の前方に自動二輪車63Aが走行している場合には、自動二輪車63Aと車車間通信を行ない、自動運転車両60が自動二輪車63Aに追従運転して本線合流したい旨のメッセージを自動二輪車63Aに音声にて通信する。これにより、自車の自動運転車両60の前方を走行する自動二輪車63Aは露払い車両として自車の先導役を果すことができ、一群の仮想集団65として(本線上を走行する走行車両Aに)車両認識される可能性が高まる。高速道路61の本線上を(合流地点に向って)走行している合流点上流側の走行車両Aは、自動二輪車63Aと自動運転車両60とが一群の仮想集団65として車両認識され易くなる。
高速道路61の合流地点付近の上流側を走行する走行車両Aは、自動二輪車63Aと自車の自動運転車両60とが一群の仮想集団65と認識され易くなって、走行環境変化(状況変化)の発生が期待される。本線上の走行車両Aの走行環境変化を期待しつつ、自車の自動運転車両60が自動運転を継続したまま、本線への合流機会が模索され、本線合流がスムーズに行なわれ易くなる。
自車の自動運転車両60が高速道路61のランプ62で、本線合流を図ろうとするとき、自車の自動運転車両60の先方に自動二輪車が存在せず、後方に自動二輪車63が本線合流を目指して図3に示すように存在する場合がある。この場合には、自動運転車両60は、自動二輪車63と音声による車車間通信をテレマティクス21の通信モジュールにより行なって、自動二輪車63に露払い車両として自車の先導役の役割を果して貰うように要請する。
自動二輪車63が露払い車両の役割を承認する場合には、自車の自動運転車両60は高速道路61の本線側と反対側の左側に車寄せして、自動二輪車63に鎖線で示すように高速道路(本線:右)側から追い抜いて貰い、自動二輪車63に自車の自動運転車両60の露払い車両として自車の先導役を依頼する。自動二輪車63に露払い車両の先導役としての承認が得られない場合には、後述するように、ナビゲーションECU15の運転制御プログラム(図4)により自車の自動運転車両60は手動運転に切り替えて本線合流が図られる。
また、自動二輪車63が露払い車両の役割を承諾した場合には、自動二輪車63に自車の自動運転車両60を追い抜いて貰い、露払い車両の先導役としての役割を依頼する。自動二輪車63の追抜きは、自車の自動運転車両60の本線側(右側)から追い抜いて貰い、自動二輪車63の走行が一時的に自車の自動運転車両の陰にならないようにセットされる。
これは、自動二輪車63の走行が自車の自動運転車両60の陰に本線上の合流点上流側を走行する走行車両Aが自動運転車両の場合、その車両の撮像手段から一時的に消えてしまい、自動二輪車63の存在を把握することが困難となるためである。
自車の自動運転車両60を自動二輪車63が追い抜いて露払い車両として自車の先導役を果して貰うと、自動二輪車63は図3に示すように符号63Aの位置に移動し、自車の自動運転車両60は自動二輪車63Aに追従走行するようにする。露払い車両の自動二輪車63Aに追従走行する自車の自動運転車両60は、両車両が一群の仮想集団65として、本線上を走行する走行車両Aに車両認識され易くなる。自車の自動運転車両60は、自動運転を継続したまま本線合流し易くなる。
自動二輪車63Aと自車の自動運転車両60とが一群の仮想集団65として車両認識され易くなると、本線上の走行車両Aは車線変更やブレーキ操作等により走行環境変化が生じ易くなり、自車の自動運転車両60は自動運転をキープしたまま本線合流がし易くなる。その結果、自動二輪車63Aは、本線上の走行車両Aから見落とされる可能性も減少し、本線合流する際の予防安全効果が上昇するメリットがある。
このように、自動二輪車63が自車の自動運転車両60を追い抜き、露払い車両として自車の先導役として機能すると、自動二輪車63は図3に示すように符号63Aに示す位置に移動し、自車の自動運転車両60は自動二輪車63A(63)に追従走行するようになる。自動二輪車63A(63)と自車の自動運転車両60とは、一群の仮想集団65として車両認識され易くなる。これにより、本線上の走行車両Aは自動二輪車63A(63)と自車の自動運転車両60との一群の仮想集団により、車両認識機能が高まり、本線上の走行環境変化(状況変化)が生じ易くなり、自車の自動運転車両60は本線上の走行車両Aの走行環境を監視し、自動運転を継続したまま本線合流の機会が模索され、本線合流し易くなる。
一方、本線上を走行する走行車両Aに一群の仮想集団として車両認識をして貰うには、車両認識上の観点からは大きな集団である方が有利である。図4に示される運転処理プログラムのフローチャートでは、自車の自動運転車両60は先行する自動二輪車63Aとの車車間通信を前提として互いに確認されるが、自車の自動運転車両60の前後に同時に自動二輪車63A,63が存在する場合には、後方走行する自動二輪車63との車車間通信により、後方自動二輪車63の協力が得られれば、一群の仮想集団65としてさらに大きく車両認識され易くなり、自動運転車両60は自動運転が継続したままの自車の自動運転車両60の本線合流上より有利となる。
また、自車の自動運転車両60を自動運転継続したままでの本線合流の有無は、本線上の走行車両Aと自車の自動運転車両60との相対速度、合流地点における相互距離(車間距離)が所定の走行環境条件を満たしていることを車線合流条件とする。所定の車線合流条件は、例えば一般に知られている四輪車両の所定の速度から安全に停止できる距離等を参考にして決められる。
ところで、自車の自動運転車両60は、自動二輪車63Aに追随走行許可された場合の車間距離と、単に先行する自動二輪車63Aとの車間距離とを比較すると、単に先行する自動二輪車63との車間距離である、後者の車間距離の方が長い場合が多い。一群の仮想集団65として車両認識をして貰うためには、車間距離が長いと困難な場合が多いので、自動二輪車63A(63)と自車の自動運転車両60とが一群の仮想集団65として車両認識を受けるためには、車間距離は所要の距離、例えば30m以内であることが望まれる。この値は、例えば、一般に知られている四輪車が所定の速度から安全に停止できる距離(時速80kmでは52m、時速50kmでは24m)を参考にするとともに、一群として認識可能な限界距離はどの程度であるかの両方に配慮して決めればよい値であり、必ずしもここで示す30mに限定はされない。
[車線合流時の運転処理プログラム]
自車の自動運転車両60が、自動車専用道路である高速道路61のランプ62から本線への合流は、ナビゲーション装置11のナビゲーションECU15に備えられた図4の運転処理プログラムにより、自動運転継続したまま可能であるか否かが判断される。図4のフローチャートに示される運転処理プログラムは図1に示すナビゲーション装置11に備えられているナビゲーションECU15のRAM24やROM25に記憶されており、CPU23により車両制御ECU12と協働して実行される。ナビゲーションECU15のCPU23は、例えば走行開始時に操作手段16のユーザ操作により走行予定経路(案内経路)が取得される。ナビゲーション装置11のナビゲーションECU15と車両制御ECU12とにより、車線合流時の自動運転継続可否判断装置66が構成される。
自車の自動運転車両60が、自動車専用道路である高速道路61のランプ62から本線への合流は、ナビゲーション装置11のナビゲーションECU15に備えられた図4の運転処理プログラムにより、自動運転継続したまま可能であるか否かが判断される。図4のフローチャートに示される運転処理プログラムは図1に示すナビゲーション装置11に備えられているナビゲーションECU15のRAM24やROM25に記憶されており、CPU23により車両制御ECU12と協働して実行される。ナビゲーションECU15のCPU23は、例えば走行開始時に操作手段16のユーザ操作により走行予定経路(案内経路)が取得される。ナビゲーション装置11のナビゲーションECU15と車両制御ECU12とにより、車線合流時の自動運転継続可否判断装置66が構成される。
自車の自動運転車両60は、各種操作ボタン58が自動運転制御を選択して押圧操作すると、車両制御ECU12およびナビゲーションECU15により自動運転が行なわれる。車両制御ECU12とナビゲーションECU15とは、双方向通信可能に構成される。図4のフローチャートに示される運転制御プログラムは、ナビゲーション装置11のナビゲーションECU15に備えられたRAM24やROM25に記憶されており、CPU23により実行される。
自車の自動運転車両60が自動運転された状態で、高速道路61のランプ62への入線路に入ると、CPU23はステップ(S1)で自動運転を継続したままの合流が判断され、自動運転を継続する場合には、続いてステップ(S2)で自車の自動運転車両60が単独で車線合流ができるか否かが判断される。次に、ステップ3(S3)で自車の自動運転車両60の先方に自動二輪車が存在するか否か判断され、先方に自動二輪車がいない場合にはステップ4(S4)で自車の自動運転車両60の後方に自動二輪車が存在するか否かが判断される。
自車の後方に自動二輪車63が存在する場合には、ステップ5(S5)で自車の自動運転車両60を追抜き可能か否か、両者間の車間距離、相対速度等から判断される。自動二輪車63が自車の自動運転車両60を追抜き可能であると判断した場合には、ステップ6(S6)で自車の自動運転車両60は、後方走行の自動二輪車63と車車間通信を行ない、自動二輪車63に自車の自動運転車両60を追い越してくれるか否か要請し、確認が行なわれる。自車の自動運転車両60と後方の自動二輪車63との車車間通信は、テレマティクス21やスピーカ19を用いて確認される。
自動二輪車63が自車の自動運転車両60の追抜きを承諾した場合には、自車の自動運転車両60は、自動二輪車63が追い抜き易い走行環境を整えて追い抜かせる。続いて、ステップ7(S7)で自車の自動運転車両60は自動二輪車63が自車を追い越したか否かが確認される。
自車の自動運転車両60を自動二輪車63が追い越した場合には、自動二輪車63は符号63Aに移動し、自車の自動運転車両60の露払い車両の機能を果すように、必要に応じて要請し、自動二輪車63A(63)と自車の自動運転車両60とは一群の仮想集団65として車両確認されるように、自車が追随走行される。
自動二輪車63A(63)が自車の自動運転車両60を追い越すことにより、合流先の車線を走行する走行車両Aの車両流れに走行環境の変化が生じたか否かが、ミリ波レーダ57の撮像手段55からの信号入力を受ける車両制御ECU12および双方向通信されるナビゲーションECU15により確認される。
高速道路61の車線上を走行する走行車両Aに走行環境の変化が認められない場合には、ステップ9(S9)で、自車の自動運転車両60は、自動二輪車63A(63)に対し、追随走行の許可を得たか否かが確認される。
また、ステップ8(S8)で高速道路61を走行する合流点上流側の走行車両Aの走行環境変化が生じた場合には、ステップ10(S10)に移行し、S10で自車の自動運転車両60は、合流点上流側の直近の走行車両Aとの間に走行環境(相対速度、車間距離)が車線合流条件に適合するか、充分であるか否かが判断される。
自車の自動運転車両60と合流点上流側の走行車両Aとの走行環境が本線合流条件を満たしている場合には、自車の自動運転車両60は、ステップ11(S11)で自動運転を継続して本線合流が図られる。
また、S9で自車の自動運転車両60が自動二輪車63から追随走行可能の許可が得られなかったり、さらに、S10で自車の自動運転車両60が合流点上流側で本線上を走行する走行車両Aとの間で走行環境(相対速度や車間距離)が本線合流条件を満たさない場合には、ステップ12(S12)で、自車の自動運転車両60はナビゲーション装置11のナビゲーションECU15を操作し、CPU23の実行により車両制御ECU12は、ユーザの手動操作により手動運転に切り替えて、本線合流が実行される。
自車の自動運転車両60は本線合流後は、ユーザの手動操作による手動運転を続けても、また、本線合流後に各種操作ボタン58のボタン操作により、再び自動運転に切り替えて、自動運転を続けるようにしてもよい。高速道路61の本線上の走行において自動運転に再び切り替えられると、自車の自動運転車両60は、車両制御ECU12は、ステアリング装置43がレーンキーピングアシスト47により、車線に沿ったステアリング操作が自動で行なわれたり、また、駆動装置44は、車間距離制御クルーズコントロール50により、自車の自動運転車両60は、ミリ波レーダ57等で先行車両と走行レーンをチェンジし、設定した速度で車間距離を維持しながら追従走行され、設定された目的地に向って自動運転される。
自車の自動運転車両60が、図1に示す自動運転支援システム10を装備して、完全自動運転できるようになると、自動運転車両60の自動運転により、先行車両との車間距離を縮めることができたり、走行車線の車線幅を狭くすることができ、さらに、自動運転車両60が使用するエネルギを削減して車両速度を向上させ、交通量をスムーズに増大させることができ、自動車事故が大幅に減少し、ゼロになる等のメリットが生ずることが期待される。
[本実施形態の効果]
自動運転車両が自動車専用道路等の高速道路の本線合流時に、自動運転を継続したまま本線合流を図ることができる可能性が大きくなる。
自動運転車両が自動車専用道路等の高速道路の本線合流時に、自動運転を継続したまま本線合流を図ることができる可能性が大きくなる。
また、自動運転車両は自動運転を継続したまま本線への合流機会が増大し、さらに、本線合流を目指す自動二輪車が存在する場合には、自動二輪車を自車の自動運転車両の露払い車両(先導役)として、合流地点の上流側で本線上を走行する走行車両Aに認知させ易くし、自車の自動運転車両と自動二輪車とで一群の仮想集団を構成し、高速道路等の本線上を走行する走行車両からの車両認識機能を向上させることができる。自動二輪車にとっては、本線への合流機会の際の予防安全効果が向上するメリットがある。
なお、本発明の実施形態においては、自車の自動運転車両がランプから高速道路に本線合流する場合、自動二輪車の動きを自車の露払い車両として活用する例を説明したが、自車の自動運転車両が他の自動車専用道路、例えば都市高速道路や有料道路、一般道路へ車線合流する場合も対象とする。さらに、高速道路のインターチェンジにおいて、一般点から高速道路の本線上に合流する場合だけでなく、サービスエリアやパーキングエリアから自動車専用道路等の高速道路に本線合流する場合や、高速道路ジャンクションのように一方の高速道路から他方の高速道路に本線合流する場合も含まれる。
以上、本発明の実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、3輪の車両に適用することができ、様々な形態で実施することが可能であり、発明の要旨を逸脱しない範囲で種々の省略、置き換え、変更を行なうことができる。これらの実施形態やその変形例は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
10…自動運転支援システム、11…ナビゲーション装置、12…車両制御ECU、13…現在位置検出手段、14…データ記録手段、15…ナビゲーションECU、16…操作手段、17…音声認識システム、18…表示手段、19…スピーカ、20…DVDドライブ、21…テレマティクス(通信モジュール)、23…CPU、24…RAM、25…ROM、26…フラッシュメモリ、27…GPS送・受信機、28…車速センサ、29…ステアリングセンサ、30…ジャイロセンサ、33…地図情報DB(データベース)、34…探索データ、35…リンクデータ、36…ノードデータ、40…ステアリング駆動制御部、41…アクセル駆動制御部、42…ブレーキ駆動制御部、43…ステアリング装置、44…駆動装置(アクセル装置)、45…制動装置(ブレーキ装置)、47…レーンキーピングアシスト(車線維持支援システム)、48…インテリジェントパーキングアシスト、50…車間距離制御クルーズコントロール、51…トラクションコントロール(TRC)、52…横滑り防止装置(ESC)、53…衝突被害軽減ブレーキ、55…撮像手段、56…車外カメラ、57…ミリ波レーダ、60…(自車の)自動運転車両、61…高速道路、62…ランプ、63,63A…自動二輪車、64…中央分離帯、65…一群の仮想集団、66…車線合流時の自動運転継続可否判断装置。
Claims (5)
- 自動運転車両の走行を自動運転制御により支援し、車車間通信装置を備えた自動運転支援システムを有し、
前記自動運転車両の先方を車車間通信装置を備えた自動二輪車が、本線への合流地点に向って所定の車間距離を保持しながら走行する場合の前記自動運転車両の車線合流時の自動運転継続可否判断装置であって、
前記自動運転車両は、前記合流地点での自動運転継続可否を、前記自動二輪車が前記本線上の走行車両に与える前記走行車両の走行環境変化を監視し、
前記自動運転車両は、前記本線上の走行車両との間で所定の車線合流条件を満たした場合に、自動運転の継続を実行するように設定されたことを特徴とする車線合流時の自動運転継続可否判断装置。 - 前記本線の合流地点に向う前記自動運転車両の後方に、前記自動二輪車が存在する場合、前記自動運転車両は前記自動二輪車と車車間通信を行なって、前記自動二輪車に追抜きを依頼し、前記自動運転車両の追越しを案内させる請求項1に記載の車線合流時の自動運転継続可否判断装置。
- 前記自動二輪車の、前記自動運転車両の追越しは、前記自動運転車両の本線側を通過する追越しの案内である請求項2に記載の車線合流時の自動運転継続可否判断装置。
- 前記自動運転車両は、前記自動二輪車と車車間通信により情報交換が行なわれ、前記自動二輪車に対して前記自動運転車両の追随走行が許可されることで、前記自動二輪車と前記自動運転車両とは前記本線上を走行する走行車両に、一群の仮想集団として認識の可能性を向上させる請求項1ないし3のいずれか1項に記載の車線合流時の自動運転継続可否判断装置。
- 自動運転支援システムは、自動運転車両の走行を自動運転制御により支援するステップと、
前記自動運転車両の先方を自動二輪車が、本線上への合流地点に向って所定の車間距離を保持しながら走行する場合、自動運転継続可否制御装置が本線合流時の自動運転継続可否を判断するステップと、
前記自動運転車両は、前記合流地点での自動運転継続可否を、前記自動二輪車が前記本線上の走行車両に与える前記走行車両の走行環境変化を監視するステップと、
前記自動運転車両は、前記本線上の走行車両との間で所定の車線合流条件を満たした場合に、自動運転継続を実行するステップとを有することを特徴とする車線合流時の自動運転継続可否判断方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016020750A JP2017138887A (ja) | 2016-02-05 | 2016-02-05 | 車線合流時の自動運転継続可否判断装置およびその自動運転継続可否判断方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016020750A JP2017138887A (ja) | 2016-02-05 | 2016-02-05 | 車線合流時の自動運転継続可否判断装置およびその自動運転継続可否判断方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017138887A true JP2017138887A (ja) | 2017-08-10 |
Family
ID=59565908
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016020750A Pending JP2017138887A (ja) | 2016-02-05 | 2016-02-05 | 車線合流時の自動運転継続可否判断装置およびその自動運転継続可否判断方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017138887A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019079168A (ja) * | 2017-10-23 | 2019-05-23 | 株式会社デンソー | 自動運転システム、自動運転方法、及び自動運転プログラム |
| WO2020054528A1 (ja) * | 2018-09-11 | 2020-03-19 | デジタルデザインスタジオ株式会社 | 自転車用ヘルメットおよび補助灯火装置 |
| CN111194459A (zh) * | 2017-10-10 | 2020-05-22 | 大众汽车有限公司 | 自动驾驶功能部件的评估和在不同处理阶段中的道路识别 |
| CN111391825A (zh) * | 2018-12-27 | 2020-07-10 | 本田技研工业株式会社 | 车辆控制装置 |
| CN111583640A (zh) * | 2020-04-30 | 2020-08-25 | 重庆大学 | 基于车路协同的上匝道协同并道控制方法 |
| JPWO2019069868A1 (ja) * | 2017-10-04 | 2020-11-26 | パイオニア株式会社 | 判定装置及び判定方法並びに判定用プログラム |
| JPWO2021181625A1 (ja) * | 2020-03-12 | 2021-09-16 | ||
| CN113460086A (zh) * | 2021-06-30 | 2021-10-01 | 重庆长安汽车股份有限公司 | 自动驾驶进入匝道的控制系统、方法、车辆及存储介质 |
| JPWO2022136963A1 (ja) * | 2020-12-23 | 2022-06-30 |
-
2016
- 2016-02-05 JP JP2016020750A patent/JP2017138887A/ja active Pending
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019069868A1 (ja) * | 2017-10-04 | 2020-11-26 | パイオニア株式会社 | 判定装置及び判定方法並びに判定用プログラム |
| US11568747B2 (en) | 2017-10-04 | 2023-01-31 | Pioneer Corporation | Determination device, determination method, and program for determination |
| CN111194459A (zh) * | 2017-10-10 | 2020-05-22 | 大众汽车有限公司 | 自动驾驶功能部件的评估和在不同处理阶段中的道路识别 |
| CN111194459B (zh) * | 2017-10-10 | 2024-01-09 | 大众汽车有限公司 | 自动驾驶功能部件的评估和在不同处理阶段中的道路识别 |
| JP2019079168A (ja) * | 2017-10-23 | 2019-05-23 | 株式会社デンソー | 自動運転システム、自動運転方法、及び自動運転プログラム |
| JP7006124B2 (ja) | 2017-10-23 | 2022-01-24 | 株式会社デンソー | 自動運転システム、自動運転方法、及び自動運転プログラム |
| WO2020054528A1 (ja) * | 2018-09-11 | 2020-03-19 | デジタルデザインスタジオ株式会社 | 自転車用ヘルメットおよび補助灯火装置 |
| CN111391825A (zh) * | 2018-12-27 | 2020-07-10 | 本田技研工业株式会社 | 车辆控制装置 |
| CN115210124A (zh) * | 2020-03-12 | 2022-10-18 | 本田技研工业株式会社 | 车辆跟随行驶系统、信息处理装置、信息处理方法以及程序 |
| JPWO2021181625A1 (ja) * | 2020-03-12 | 2021-09-16 | ||
| WO2021181625A1 (ja) * | 2020-03-12 | 2021-09-16 | 本田技研工業株式会社 | 車両追従走行システム、情報処理装置、情報処理方法、及びプログラム |
| JP7297143B2 (ja) | 2020-03-12 | 2023-06-23 | 本田技研工業株式会社 | 車両追従走行システム、情報処理装置、情報処理方法、及びプログラム |
| CN111583640A (zh) * | 2020-04-30 | 2020-08-25 | 重庆大学 | 基于车路协同的上匝道协同并道控制方法 |
| CN111583640B (zh) * | 2020-04-30 | 2022-04-22 | 重庆大学 | 基于车路协同的上匝道协同并道控制方法 |
| JPWO2022136963A1 (ja) * | 2020-12-23 | 2022-06-30 | ||
| JP7553604B2 (ja) | 2020-12-23 | 2024-09-18 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | ライダー支援システムの制御装置及び制御方法 |
| CN113460086A (zh) * | 2021-06-30 | 2021-10-01 | 重庆长安汽车股份有限公司 | 自动驾驶进入匝道的控制系统、方法、车辆及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11498563B2 (en) | Vehicle control device, vehicle control method, and storage medium | |
| CN113826153B (zh) | 车辆的行驶控制方法及行驶控制装置 | |
| JP7215596B2 (ja) | 運転制御方法及び運転制御装置 | |
| JP2017138887A (ja) | 車線合流時の自動運転継続可否判断装置およびその自動運転継続可否判断方法 | |
| CN107539313B (zh) | 车辆通信网络以及其使用和制造方法 | |
| JP6103716B2 (ja) | 車両の走行制御装置 | |
| US12447991B2 (en) | Vehicle lane change control method and vehicle lane change control device | |
| KR102367952B1 (ko) | 비전 시스템, 그를 가지는 차량 및 그 제어 방법 | |
| US20230399004A1 (en) | Ar display device for vehicle and method for operating same | |
| JP6690666B2 (ja) | 警報装置、警報システム及び携帯端末 | |
| JP7157780B2 (ja) | 自動運転車用情報提示装置 | |
| CN115214660A (zh) | 驾驶员辅助系统及包括驾驶员辅助系统的车辆 | |
| CN110431059A (zh) | 驾驶支援控制装置 | |
| US12466399B2 (en) | Device for providing route and method for providing route therefor | |
| JP7331450B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP4589947B2 (ja) | 情報提供車載装置 | |
| CN120646003A (zh) | 驾驶辅助装置、驾驶辅助方法以及程序产品 | |
| JP7819573B2 (ja) | 経路生成方法及び経路生成装置 | |
| JP7307566B2 (ja) | 自動運転支援装置 | |
| US11518306B2 (en) | Warning control device, warning control method, and computer program product | |
| KR20230020030A (ko) | 운전자 보조 장치 및 그를 가지는 차량 | |
| CN120646001A (zh) | 驾驶辅助装置、驾驶辅助方法以及程序产品 | |
| CN120645996A (zh) | 驾驶辅助装置、驾驶辅助方法以及程序产品 | |
| JP4954956B2 (ja) | 車両運転支援装置 | |
| JP6367081B2 (ja) | 走行支援装置、走行支援プログラムおよび走行支援方法 |