JP2017140731A - ブロー成形装置、ブロー成形品およびブロー成形方法 - Google Patents
ブロー成形装置、ブロー成形品およびブロー成形方法 Download PDFInfo
- Publication number
- JP2017140731A JP2017140731A JP2016022676A JP2016022676A JP2017140731A JP 2017140731 A JP2017140731 A JP 2017140731A JP 2016022676 A JP2016022676 A JP 2016022676A JP 2016022676 A JP2016022676 A JP 2016022676A JP 2017140731 A JP2017140731 A JP 2017140731A
- Authority
- JP
- Japan
- Prior art keywords
- parison
- blow molding
- blow
- unit
- molding material
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Blow-Moulding Or Thermoforming Of Plastics Or The Like (AREA)
Abstract
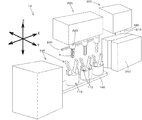
【解決手段】ブロー成形装置10は、成形材料を加熱溶融させたパリソンPをダイスヘッド220から下方へ押し出す押出ユニット200と、対向させた合わせ面が離隔接近する2つに分割された金型310によりパリソンPを挟み込んで金型310で挟み込まれたパリソンPに空気を送り込んでボトルの形状にブロー成形するブロー成形ユニット300と、押出ユニット200から押し出されたパリソンPをブロー成形前に爪112により挟持して捻回するチャックユニット100とから構成される。
【選択図】図1
Description
このようなプラスチックボトルの製造方法としては、ダイレクトブロー成形、2軸延伸ブロー成形、インジェクションブロー成形などが広く用いられている。ダイレクトブロー成形方法は、特開平07−214653号公報(特許文献1)に開示されるように、押出機から押し出された筒状のパリソン(略中空円筒形状のチューブ)を、ブロー金型の一対の割り金型で挟み込み、この挟み込んだパリソンの内部(中空円筒形状の中空円筒部)に圧縮空気を吹き込んで中空品を成形する。
ブロー成形方法においてプラスチックボトルの側面の外面にこれらの模様を成形するには、まず金型に彫刻し、その金型に吹き込み空気の圧力で樹脂を倣わせることにより外面に模様を表す方法が一般的であった。しかし、ストライプ模様等を施すための金型の加工では、凹面部に立体的な彫刻をしなければならないため手数が多く、製造コストが高くなる欠点があった。さらに、金型彫刻により外面に凹凸が表されたボトルはその後の加飾特に印刷、スタンプ加工などが困難になる欠点があった。さらに、ボトルを化粧液など粘性の高い液体の容器として用いる場合にボトルの内面が平滑であると、ボトルを傾けたときに口部の全体が液体で塞がれてスムーズに空気を取り入れることができず、液体の排出に手間取る問題があった。
すなわち、本発明に係るブロー成形装置は、ブロー成形法により合成樹脂製の成形品を製造する成形装置であって、第1の成形材料を加熱溶融させた略中空円筒形状の基体層の内周面および外周面の少なくとも一方の周面から出っ張るように形成されるとともに前記パリソンの押し出し方向に沿って形成される1以上の凸部を備えた非円環断面形状のパリソンを、ダイスヘッドから下方へ押し出す押し出し機構と、前記押し出されたパリソンを金型で挟み込んでブロー成形するブロー成形機構とを含み、前記凸部は、前記基体層を形成する第1の成形材料とは前記ダイスヘッド内の樹脂通路が異なる第2の成形材料で形成される。
さらに好ましくは、前記第1の成形材料の色彩と前記第2の成形材料の色彩とが異なるように構成することができる。
さらに好ましくは、前記押し出し機構は、前記パリソンの略中空円筒形状を維持するために前記パリソンの中空部にエアーを流通させながら前記パリソンを押し出し、前記把持手段は、前記エアーの流通を阻害しないように、前記パリソンの端部を把持するように構成することができる。
さらに好ましくは、前記ブロー成形機構は、前記把持手段による把持が解除されたパリソンをブロー成形し、前記把持手段は、前記パリソンの端部の外筒面を一対のチャックで挟持し、前記金型は、対向させた合わせ面が離隔接近する少なくとも2つに分割された金型であって、前記回転手段は、前記チャックが解除されたパリソンにおいて前記チャックにより挟持されたことにより形成された略平らな平面が、前記合わせ面を含む平面と略平行になるように、前記パリソンの端部を把持した把持手段の回転を停止するように構成することができる。
また、本発明のさらに別の態様に係るブロー成形方法は、ブロー成形法により合成樹脂製の成形品を製造する成形方法であって、第1の成形材料を加熱溶融させた略中空円筒形状の基体層の内周面および外周面の少なくとも一方の周面から出っ張るように形成されるとともに前記パリソンの押し出し方向に沿って形成される1以上の凸部を備えた非円環断面形状のパリソンを、ダイスヘッドから下方へ押し出す押出ステップと、前記押し出されたパリソンを金型で挟み込んでブロー成形する成形ステップとを含み、前記凸部は、前記基体層を形成する第1の成形材料とは前記ダイスヘッド内の樹脂通路が異なる第2の成形材料で形成される。
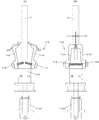
図1に本実施の形態に係るブロー成形装置10の全体を示す斜視図を、図2にブロー成形装置10の全体を示す正面図を、図3にブロー成形装置10の全体を示す側面図を、図4に図2におけるチャックユニット(捻回機構)100の拡大図を、それぞれ示す。
これらの図に示すように、このブロー成形装置10は、成形材料を加熱溶融させたパリソンPをダイスヘッド220から下方へ押し出す押出ユニット(押し出し機構)200と、対向させた合わせ面が離隔接近する2つに分割された金型310によりパリソンPを挟み込んで金型310で挟み込まれたパリソンPに空気を送り込んでボトルBの形状にブロー成形するブロー成形ユニット(ブロー成形機構)300と、押出ユニット200から押し出されたパリソンPを把持して捻回するチャックユニット100とから構成される。
チャックユニット100においては、チャック110が、矢示X(1)、X(2)の水平方向および矢示Z(1)、Z(2)の垂直方向へ移動可能に、ブロー成形ユニット300においては、金型310が、矢示X(3)、X(4)の水平方向および矢示Y(3)、Y(4)の水平方向へ移動可能に、ブローヘッド330が、矢示Z(5)、Z(6)の垂直方向へ移動可能に、それぞれ構成されている。
図10(A)に示すダイスヘッド400の一部断面図、図10(B)に示すダイスヘッド400の一部下面図、図10(C)に示す図10(B)の部分拡大図を参照して、このダイスヘッド400について説明する。なお、図10においては、樹脂供給機構である、押出機、プランジャ、アキュームレータ等については公知技術であるため描いていない。
すなわち、環状空間通路460から吐出された成型材料がパリソンPの基体層を形成し、スリット472から吐出された成型材料がパリソンPの加飾部である凸部Gを形成し、全体として非円環断面形状のパリソンPが、ダイスヘッド220から下方へ押し出される。
このブロー成形装置10においては、押出ユニット200は、パリソンPを連続的に押し出すために、チャックユニット100のチャック110がパリソンPの下端部を挟持しているときには、パリソンPの押し出し速度に対応させて、チャックユニット100の回転軸方向に沿って下方(矢示Z(2)方向)へ移動する。
チャック110がパリソンPの下端部の外筒面を一対のチャック110で挟持して、その挟持を解除すると、外気温にパリソンPが触れておりパリソンPの温度が低下していることもあって元の円筒形状に戻らないで、チャック110で挟持していたパリソンPの下端部は変形して略平らな平面(図6(D)参照)が形成されてしまう。この場合において、金型310が対向させた合わせ面が離隔接近する2つに分割された金型である場合に、パリソンPの変形した下端部の略平らな平面が、合わせ面を含む平面と略平行でないと、金型310が接近して合わせ面が圧接されたときに略平らな平面が抵抗になる等の理由でボトルBの底面に乱れた模様を形成してしまう場合がある。このため、チャック110が解除されたパリソンPにおいてチャック110により挟持されたことにより形成された略平らな平面が、金型310の合わせ面を含む平面と略平行になる位置で、パリソンPの下端部を挟持したチャック110の回転を停止するようにしている(図6(D)、図6(E)参照)。
・チャックユニット
このチャックユニット100は、一般的なダイレクトブロー成形装置が備えないで、本発明に係るブロー成形装置10が独自に備える特徴的なユニットである。
チャックユニット100は、パリソンPの下端部を挟持する一対の爪112から構成されるチャック110と、そのチャック110を回転させる回転サーボモータ1130等の回転機構と、そのチャック110を水平移動させる水平移動サーボモータ1110および水平スライドベース140等の水平移動機構と、そのチャック110を上下移動させる上下移動サーボモータ1120および垂直スライドベース130等の水平移動機構と、そのチャック110を開閉するチャックエアシリンダ1140とから構成される。
次に、図6を参照して、この回転機構の回転角度と回転終了位置とについて説明する。ここでは、目標回転角度(ブロー成形後のボトルBにおける捻り角度)を300°としている。上述したように、ブロー成形ユニット300は、チャック110による挟持が解除されたパリソンPをブロー成形する。この場合において、パリソンPの大きさ等の形状、回転角度、成形材料の粘性等の諸元によっては、チャック110による挟持が解除されたパリソンが金型310で挟み込まれるまでの間(後述する図8のタイミングチャートにおける時刻T(8)〜時刻T(12)の間)に、捻れが戻ってしまう場合がある。このような場合に対応して、チャックユニット100でパリソンPを回転させる所定の角度は、ブロー成形後の成形品における捻り角度(図6では目標回転角300°)に、チャック110の挟持が解除されたパリソンPが金型310で挟み込まれるまでに戻る角度(図6では過回転角15°)に対応させた角度分だけ余分に加えた角度(図6では回転角315°)としている。
上述したように、チャック110がパリソンPの下端部の外筒面を一対の爪112で挟持して、その挟持を解除すると、外気温にパリソンPが触れておりパリソンPの温度が低下していることもあって元の円筒形状に戻らないで、チャック110で挟持していたパリソンPの下端部は変形して略平らな平面(ただし図6(D)に示すようにこの場合でも中空部は潰れていない)が形成され円筒形状には戻らない。特に、パリソンPの成形材料の粘性等の諸元およびこのブロー成形装置10の周囲温度等によっては大きく変形して略平らな平面が形成されてしまい、元の円筒形状に戻らない。図6(C)に示す状態から爪112による挟持を解除すると、パリソンPは金型310で挟み込まれるまでに戻る過回転角に対応する角度まで捻れが戻る。
すなわち、チャックユニット100によるパリソンPの捻回(回転)については、
(1)その回転角度(の絶対値)は、ブロー成形後の成形品における捻り角度(図6では目標回転角300°)に、チャック110の挟持が解除されたパリソンPが金型310で挟み込まれるまでに戻る角度(図6では過回転角15°)に対応させた角度分だけ余分に加えた角度(図6では回転角315°)であって、
(2)その回転終了角度は、パリソンPが金型310で挟み込まれるまでに捻れが戻ったときに(図6では過回転角15°分が戻る)のパリソンPの下端部の略平らな平面が金型310の合わせ面を含む平面と略平行になる位置である、
ように、パリソンPの大きさ等の形状、回転角度、成形材料の粘性等の諸元に基づいて(場合によっては試行錯誤して)、チャックユニット100の回転サーボモータ1130の制御パラメータ(回転開始角、回転終了角、回転時間(=下降時間)、回転開始タイミング、回転終了タイミング等)が適宜設定される。
・押出ユニット
この押出ユニット200は、一般的なダイレクトブロー成形装置に好適に適用されるユニットであって、成形材料を加熱溶融させてパリソンPを中空円筒形状を維持して押し出す。上述したように、特徴的であるのは、成形品であるボトルBの内面に模様を施すために、ダイスとコアとを収納したダイスヘッド220のコアに1以上のスリット(溝)を設けている点である。このようにコアにスリットを設けることにより、コアに設けたスリットの部分に対応してパリソンPの内筒面の内面に1以上の凸部Gが形成され、コアに設けたスリット以外の部分に対応してパリソンPの内筒面の内面に1以上の縦溝H(凹部)が形成される。
・ブロー成形ユニット
このブロー成形ユニット300は、一般的なダイレクトブロー成形装置に好適に適用されるユニットであって、成形材料を加熱溶融させたパリソンPを金型310で挟み込んで、金型310に挟み込んだパリソンPの内部に空気を吹き込んで中空品を成形する。この金型310は、スライドベース320上を金型水平移動サーボモータ1310により矢示X(3)、X(4)方向へ移動する。さらに、この金型310は、矢示Y(3)、矢示Y(4)方向への開閉が可能であって、この開閉には油圧等が用いられる。
このような構成を備えたブロー成形装置10は、演算ユニット1000により制御される。演算ユニット1000を含めて後述する各種計器が、制御盤または操作盤の内部に収められて構成される。制御盤または操作盤の盤面には、タッチパネル(タッチパネル自体に加えてたとえばタッチパネル入力部1060およびタッチパネル表示ドライバ1090により構成)および緊急停止等の押釦スイッチ1070が設けられたり、パトライト(登録商標)等の表示灯1080が設けられたりする。
押出ユニット200からパリソンPが安定的に押し出されている状態で開始指令(作業者の動作に基づく開始指令)を受信したCPU1010は、ダイスヘッド220から押し出されて下降するパリソンPを検出したセンサからの検出信号を受信する。
<ステップS(2)>
パリソンPを検出したセンサの位置からチャックユニット100のチャック110(より詳しくは爪112)により挟持できる位置までパリソンPが下降するまでの遅延時間が経過すると、CPU1010は、チャックユニット100のチャックエアシリンダ1140に矢示C(2)方向に開いていた爪112を矢示C(1)方向に閉じるように指示する。
爪112が矢示C(1)方向に閉じたことを検出したCPU1010は、チャックユニット100の上下移動サーボモータ1120に把持位置から開放位置へ向けてパリソンPの押し出し速度に対応させて(同期させて)矢示Z(2)方向へ下降するように指示するともに、チャックユニット100の回転サーボモータ1130に回転開始位置から回転終了位置へ向けて回転するように指示する。
チャックユニット100の爪112が矢示Z(2)方向へ下降して開放位置まで到達したこと、および、チャックユニット100の回転機構が回転終了角度まで回転したことを検出したCPU1010は、チャックユニット100の上下移動サーボモータ1120および回転サーボモータへ停止するように指示するともに、チャックユニット100のチャックエアシリンダ1140に矢示C(1)方向に閉じていた爪112を矢示C(2)方向に開くように指示する。
爪112が矢示C(2)方向に開いたことを検出したCPU1010は、チャックユニット100の上下移動サーボモータ1120に開放位置から下待避位置まで矢示Z(2)方向へ下降するように指示する。
<ステップS(6)>
チャックユニット100の爪112が矢示Z(2)方向へ下降して下待避位置まで到達したことを検出したCPU1010は、チャックユニット100の上下移動サーボモータ1120へ停止するように指示するともに、チャックユニット100の水平移動サーボモータ1110に作動位置から左待避位置まで矢示X(2)方向へ移動するように指示する。
チャックユニット100の爪112が矢示X(2)方向へ移動して左待避位置まで到達したことを検出したCPU1010は、チャックユニット100の水平移動サーボモータ1110へ停止するように指示するともに、ブロー成形ユニット300の金型開閉(油圧)機器1320に金型310を互いに離隔するように矢示Y(4)方向へ移動するように指示する(S(7))。このS(7)で出力される信号は、チャックユニット100からブロー成形ユニット300へのインターロック信号となり、このインターロック信号を受けたブロー成形ユニット300が水平方向への移動動作を開始できるようになる。
チャックユニット100の爪112が矢示Z(1)方向へ上昇して把持位置まで到達したことを検出したCPU1010は、チャックユニット100の上下移動サーボモータ1120へ停止するように指示するとともに(S(10))、S(16)にて受信するブロー成形ユニット300からのインターロック信号の受信を待つ。
ブロー成形ユニット300の金型310が互いに離隔したことを検出したCPU1010は、金型水平移動サーボモータ1310に成形位置から受取位置まで矢示X(4)方向へ移動するように指示する。
<ステップS(13)>
ブロー成形ユニット300の金型310が矢示X(4)方向へ移動して受取位置まで到達したことを検出したCPU1010は、金型水平移動サーボモータ1310へ停止するように指示するともに、金型開閉(油圧)機器1320に金型310を互いに接近するように矢示Y(3)方向へ移動するように指示する。
ブロー成形ユニット300の金型310が互いに接近して合わせ面が当接したことを検出したCPU1010は、カッターユニット240へ作動指令を出力する。作動指令を受信すると、押出ユニット200のダイスヘッド220が原点位置からZ方向の上方向へ待避して、カッターユニット240のカッター水平面内移動エア機器1350により線状のヒートカッターが水平面内を移動して金型310に挟み込まれたパリソンPを切断して、カッターユニット240の作動完了後にダイスヘッド220がZ方向の下方向へ移動して原点位置へ復帰する。
カッターユニット240の作動が完了したことを検出したCPU1010は、金型水平移動サーボモータ1310に受取位置から成形位置まで矢示X(3)方向へ移動するように指示する。
<ステップS(16)〜S(17)>
ブロー成形ユニット300の金型310が矢示X(3)方向へ移動して成形位置まで到達したことを検出したCPU1010は、金型水平移動サーボモータ1310へ停止するように指示するともに、チャックユニット100の水平移動サーボモータ1110に左待避位置から作動位置まで矢示X(1)方向へ移動するように指示し(S(16)、ブロー成形ユニット300のブローヘッド上下移動サーボモータ1330に上待避位置からブロー位置まで矢示Z(6)方向へ下降するように指示する(S(17))。
<ステップS(18)>
ブロー成形ユニット300のブローヘッド330が矢示Z(6)方向へ下降してブロー位置まで到達したことを検出したCPU1010は、ブローヘッド上下移動サーボモータ1330へ停止するように指示するともに、ブロー成形ユニット300のエアブロー機器1340にブローエアをブローヘッド330からパリソンPの内部へ吹き出すように指示する。
ブロー成形時間が経過したことを検出したCPU1010は、ブロー成形ユニット300のエアブロー機器1340へブローエアの吐出を停止するように指示するともに、ブロー成形ユニット300の金型開閉(油圧)機器1320に金型310を互いに離隔するように矢示Y(4)方向へ移動するように指示する。
ブロー成形ユニット300の金型310が互いに離隔したことを検出したCPU1010は、ブロー成形ユニット300のブローヘッド上下移動サーボモータ1330にブローヘッド330をブロー位置から上待避位置まで矢示Z(5)方向へ上昇するように指示する。
ブローヘッド330の上昇中に、ブローヘッド330の上昇とともにボトルBは矢示Z(5)へ上昇し、その途中で上下方向に移動しない固定具340に肩部分が当接して自由落下したボトルBを検出したCPU1010は、金型開閉(油圧)機器1320に金型310を互いに接近するように矢示Y(3)方向へ移動するように指示する。
以上のような構造(プログラム構造を含む)を備えたブロー成形装置10の動作を説明する。動作の説明においても、主として図8のタイミングチャートを参照する。
作業者は、押出ユニット200から図9(A)に示すパリソンPが安定的に押し出されている状態で、ブロー成形装置10にブロー成形を開始させる(開始指令信号を与える)。
時刻T(0)から時刻T(1)まで遅延時間が経過している間に、チャック110(より詳しくは爪112)により挟持できる位置までパリソンPが下降して、時刻T(1)において矢示C(2)方向に開いていたチャックユニット100のチャック110の爪112が矢示C(1)方向に閉じる。これにより、図5(A)に示す状態から図5(B)に示す状態へ遷移して、爪112がパリソンPを挟持する。
時刻T(4)において、チャックユニット100のチャック110の爪112が開いてパリソンPの挟持が開放される。図6(C)に示す状態から図6(D)に示す状態へ遷移する。なお、チャックユニット100のチャック110の爪112が開いてパリソンPの挟持が開放する時刻T(4)から、ブロー成形ユニット300の金型310がパリソンPを挟み込む時刻T(12)までの間、パリソンPの下端部は挟持されないために、図6(C)に示す過回転角15°分だけ捻れが戻る。このときのパリソンPは図9(B)に示す状態である。
時刻T(7)から時刻T(8)までの時間において、チャックユニット100のチャック110が作動位置から左待避位置まで移動する。これにより、チャックユニット100が押出ユニット200から完全に待避して、ブロー成形ユニット300の金型310の水平移動が可能となる。
時刻T(19)から時刻T(20)までの時間(ブロー成形時間)において、パリソンPに挿入されたブローヘッド330の先端のノズルからパリソンPの内部へブローエアが吹き出されてパリソンPが膨張する。
以上のようにして、本実施の形態に係るブロー成形装置10によると、ブロー成形方法を実現できて、簡易な製造装置で安価な製造コストで、側面の内面にスパイラル模様が施されたブロー成形品を製造することができる。
<変形例>
以下において、本発明の変形例に係るブロー成形装置について説明する。本変形例に係るブロー成形装置は、上述したブロー成形装置10のダイスヘッド220(詳細には図10に示したダイスヘッド400)とは異なるダイスヘッド500を備える点を除いて、上述したブロー成形装置10と同じ構成で同じ動作を実現する。このため、同じ構成および同じ動作についての説明については、ここでは繰り返さない。
図11(A)に示すダイスヘッド500の一部断面図、図11(B)に示すダイスヘッド500の一部下面図、図11(C)に示す図11(B)の部分拡大図を参照して、このダイスヘッド500について説明する。なお、図11においては、図10と同様に、樹脂供給機構である、押出機、プランジャ、アキュームレータ等については公知技術であるため描いていない。
(1)第1の樹脂供給口531および第2の樹脂供給口532、
(2)それらの第1の樹脂供給口531および第2の樹脂供給口532にそれぞれ連結された第1のマニホールド541および第2のマニホールド542、
(3)それらの第1のマニホールド541および第2のマニホールド542にそれぞれ連結された第1の樹脂通路551Aおよび第2の樹脂通路552A、
(4)それらの第1の樹脂通路551Aおよび第2の樹脂通路552Aにそれぞれ連結された第1の樹脂通路551Bおよび第2の樹脂通路552B、
に順次供給される。
この第1のマニホールド541により、加熱溶融させた第1の成形材料が、下流に位置する、環状の第1の樹脂通路551Aおよび環状の第1の樹脂通路551Bに分配供給され、これらの第1の樹脂通路551Aおよび環状の第1の樹脂通路551Bにおいて均一な円環流動が形成され(後述する環状空間通路561から吐出されて)第1の成形材料により基体層が形成される。
本発明においては、このコア570の外周に放射状に点在した穴により吐出通路562が形成されており、この吐出通路562の部分に対応してパリソンPの内周面に凸部G(図9(A)参照)が、基体層を構成する第1の成形材料とはダイスヘッド500の内部における樹脂通路が異なる第2の成形材料により形成される。
<変形例に適用可能なダイスヘッド>
さらに、図12を参照して、この変形例に係るブロー成形装置に適用可能なダイスヘッドについて説明する。図12(A)〜図12(D)は、図11(C)に対応するダイスヘッドの下面図の部分拡大図である。なお、図12(A)〜図12(D)に示すダイスヘッドにおいても、パリソンPの内周面および外周面の少なくとも一方の面(周面)に設けられる加飾部である凸部が、基体層を構成する第1の成形材料とはダイスヘッドの内部における樹脂通路が異なる第2の成形材料(第1の成形材料と同じであっても構わないし第1の成形材料とは異なる成形材料であっても構わない)により形成される点は同じである。
しても構わない。
図12に示したこのようなダイスヘッドを用いることにより、側面の内面(内周面)および外面(外周面)の少なくとも一方の面(周面)に、異なる色彩または同じ色彩の直線状の模様またはスパイラル状の複雑な模様が施されたブロー成形品を製造することができる。
100 チャックユニット
200 押出ユニット
300 ブロー成形ユニット
1000 演算ユニット
Claims (11)
- ブロー成形法により合成樹脂製の成形品を製造する成形装置であって、
第1の成形材料を加熱溶融させた略中空円筒形状の基体層の内周面および外周面の少なくとも一方の周面から出っ張るように形成されるとともに前記パリソンの押し出し方向に沿って形成される1以上の凸部を備えた非円環断面形状のパリソンを、ダイスヘッドから下方へ押し出す押し出し機構と、
前記押し出されたパリソンを金型で挟み込んでブロー成形するブロー成形機構とを含み、
前記凸部は、前記基体層を形成する第1の成形材料とは前記ダイスヘッド内の樹脂通路が異なる第2の成形材料で形成される、ブロー成形装置。 - 前記ダイスヘッドは、ハウジングおよび2以上のマンドレルにより構成される、加熱溶融された前記第1の成形材料が流れる第1の樹脂通路と、加熱溶融された前記第2の成形材料が流れる第2の樹脂通路とを含み、
前記第1の樹脂通路と前記第2の樹脂通路とは前記ダイスヘッドの内部で合流しない、請求項1に記載のブロー成形装置。 - 前記第1の成形材料の色彩と前記第2の成形材料の色彩とが異なる、請求項1または請求項2に記載のブロー成形装置。
- 前記ブロー成形装置は、前記押し出し機構から押し出されたパリソンを把持して捻回する捻回機構をさらに含み、
前記ブロー成形機構は、前記捻回機構により捻回されたパリソンを金型で挟み込んでブロー成形し、
前記捻回機構は、
前記押し出し機構から押し出されたパリソンの端部を把持するための把持手段と、
前記パリソンの押し出し方向に平行な軸を回転軸として、前記パリソンの端部を把持した把持手段を所定の角度分だけ回転するための回転手段とを含む、請求項1〜請求項3のいずれかに記載のブロー成形装置。 - 前記押し出し機構は、前記パリソンを連続的に押し出し、
前記捻回機構は、前記パリソンの押し出し速度に対応させて前記パリソンの端部を把持した把持手段を前記回転軸方向に沿って下方へ移動するための移動手段をさらに含む、請求項4に記載のブロー成形装置。 - 前記押し出し機構は、前記パリソンの略中空円筒形状を維持するために前記パリソンの中空部にエアーを流通させながら前記パリソンを押し出し、
前記把持手段は、前記エアーの流通を阻害しないように、前記パリソンの端部を把持する、請求項4または請求項5に記載のブロー成形装置。 - 前記ブロー成形機構は、前記把持手段による把持が解除されたパリソンをブロー成形し、
前記所定の角度は、前記ブロー成形後の成形品における捻り角度に、前記把持が解除されたパリソンが前記金型で挟み込まれるまでに戻る角度に対応させた角度分だけ余分に加えた角度である、請求項4〜請求項6のいずれかに記載のブロー成形装置。 - 前記ブロー成形機構は、前記把持手段による把持が解除されたパリソンをブロー成形し、
前記把持手段は、前記パリソンの端部の外筒面を一対のチャックで挟持し、
前記金型は、対向させた合わせ面が離隔接近する少なくとも2つに分割された金型であって、
前記回転手段は、前記チャックが解除されたパリソンにおいて前記チャックにより挟持されたことにより形成された略平らな平面が、前記合わせ面を含む平面と略平行になるように、前記パリソンの端部を把持した把持手段の回転を停止する、請求項4〜請求項6のいずれかに記載のブロー成形装置。 - 請求項1〜請求項8のいずれかに記載のブロー成形装置により製造されたブロー成形品。
- ブロー成形法により合成樹脂製の成形品を製造する成形方法であって、
第1の成形材料を加熱溶融させた略中空円筒形状の基体層の内周面および外周面の少なくとも一方の周面から出っ張るように形成されるとともに前記パリソンの押し出し方向に沿って形成される1以上の凸部を備えた非円環断面形状のパリソンを、ダイスヘッドから下方へ押し出す押出ステップと、
前記押し出されたパリソンを金型で挟み込んでブロー成形する成形ステップとを含み、
前記凸部は、前記基体層を形成する第1の成形材料とは前記ダイスヘッド内の樹脂通路が異なる第2の成形材料で形成される、ブロー成形方法。 - 前記第1の成形材料の色彩と前記第2の成形材料の色彩とが異なる、請求項10に記載のブロー成形方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016022676A JP6595361B2 (ja) | 2016-02-09 | 2016-02-09 | ブロー成形装置およびブロー成形方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016022676A JP6595361B2 (ja) | 2016-02-09 | 2016-02-09 | ブロー成形装置およびブロー成形方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019117184A Division JP2019151123A (ja) | 2019-06-25 | 2019-06-25 | ブロー成形法により製造されたプラスチックボトル |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017140731A true JP2017140731A (ja) | 2017-08-17 |
| JP6595361B2 JP6595361B2 (ja) | 2019-10-23 |
Family
ID=59628157
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016022676A Active JP6595361B2 (ja) | 2016-02-09 | 2016-02-09 | ブロー成形装置およびブロー成形方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6595361B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021017283A (ja) * | 2019-07-23 | 2021-02-15 | ジェーシーシー株式会社 | ブロー成形法により製造された樹脂ボトル |
| JP2021172422A (ja) * | 2020-04-30 | 2021-11-01 | 株式会社吉野工業所 | 押出しブロー容器 |
| JP2021172423A (ja) * | 2020-04-30 | 2021-11-01 | 株式会社吉野工業所 | 押出しブロー容器 |
| CN114103061A (zh) * | 2021-12-06 | 2022-03-01 | 苏州宝柏塑胶有限公司 | 一种加强型中空塑料容器的吹塑工艺及用于该吹塑工艺的口模 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS49110752A (ja) * | 1973-02-23 | 1974-10-22 | ||
| JPS5027164U (ja) * | 1973-07-12 | 1975-03-28 | ||
| JPS59199217A (ja) * | 1983-04-28 | 1984-11-12 | Ekuseru Kk | 捩れ部を有する中空成形品製造方法 |
| JPH0584810A (ja) * | 1991-09-27 | 1993-04-06 | Mitsubishi Heavy Ind Ltd | ブロー成形装置 |
| JP2002173124A (ja) * | 2000-12-05 | 2002-06-18 | Toyo Seikan Kaisha Ltd | プラスチック製容器及びその製造方法 |
| JP2006103713A (ja) * | 2004-10-01 | 2006-04-20 | Heiwa Kagaku Kogyosho:Kk | 保形性を有する主層を含む部分多層容器 |
| JP2010201629A (ja) * | 2009-02-27 | 2010-09-16 | Daisho Glass Kk | ダイレクトブロー成形装置およびダイレクトブロー成形方法 |
| JP5947987B1 (ja) * | 2015-03-12 | 2016-07-06 | 大商硝子株式会社 | 内面螺旋条付き容器、内面螺旋条付き容器の製造方法およびその製造装置 |
-
2016
- 2016-02-09 JP JP2016022676A patent/JP6595361B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS49110752A (ja) * | 1973-02-23 | 1974-10-22 | ||
| JPS5027164U (ja) * | 1973-07-12 | 1975-03-28 | ||
| JPS59199217A (ja) * | 1983-04-28 | 1984-11-12 | Ekuseru Kk | 捩れ部を有する中空成形品製造方法 |
| JPH0584810A (ja) * | 1991-09-27 | 1993-04-06 | Mitsubishi Heavy Ind Ltd | ブロー成形装置 |
| JP2002173124A (ja) * | 2000-12-05 | 2002-06-18 | Toyo Seikan Kaisha Ltd | プラスチック製容器及びその製造方法 |
| JP2006103713A (ja) * | 2004-10-01 | 2006-04-20 | Heiwa Kagaku Kogyosho:Kk | 保形性を有する主層を含む部分多層容器 |
| JP2010201629A (ja) * | 2009-02-27 | 2010-09-16 | Daisho Glass Kk | ダイレクトブロー成形装置およびダイレクトブロー成形方法 |
| JP5947987B1 (ja) * | 2015-03-12 | 2016-07-06 | 大商硝子株式会社 | 内面螺旋条付き容器、内面螺旋条付き容器の製造方法およびその製造装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021017283A (ja) * | 2019-07-23 | 2021-02-15 | ジェーシーシー株式会社 | ブロー成形法により製造された樹脂ボトル |
| JP2021172422A (ja) * | 2020-04-30 | 2021-11-01 | 株式会社吉野工業所 | 押出しブロー容器 |
| JP2021172423A (ja) * | 2020-04-30 | 2021-11-01 | 株式会社吉野工業所 | 押出しブロー容器 |
| JP7378349B2 (ja) | 2020-04-30 | 2023-11-13 | 株式会社吉野工業所 | 押出しブロー容器 |
| JP7378348B2 (ja) | 2020-04-30 | 2023-11-13 | 株式会社吉野工業所 | 押出しブロー容器 |
| CN114103061A (zh) * | 2021-12-06 | 2022-03-01 | 苏州宝柏塑胶有限公司 | 一种加强型中空塑料容器的吹塑工艺及用于该吹塑工艺的口模 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6595361B2 (ja) | 2019-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11697241B2 (en) | Blow molding method and apparatus for forming squeezable plastic container | |
| JP6595361B2 (ja) | ブロー成形装置およびブロー成形方法 | |
| JP5178827B2 (ja) | 熱可塑性プラスチック材料製中空体の製造方法と装置 | |
| JPS6243850B2 (ja) | ||
| JP2015509057A (ja) | プラスチック物品を製造するための方法ならびにブロー成形用金型の部材 | |
| CN107405818B (zh) | 带内表面螺旋条的容器、带内表面螺旋条的容器的制造方法及其制造装置 | |
| JP2019151123A (ja) | ブロー成形法により製造されたプラスチックボトル | |
| JP6533428B2 (ja) | ブロー成形装置およびブロー成形方法 | |
| US3640665A (en) | Tangentially sliding neck swaging mechanism | |
| JP5376200B2 (ja) | ブロー成形容器と成形方法 | |
| JP2001322161A (ja) | ブロー成形による内面模様付きボトルの製造方法及びプラスチックボトル | |
| CN105172108A (zh) | 一种折叠式包装桶吹塑模具 | |
| CN114945454B (zh) | 树脂制容器的制造方法、制造装置以及模具组件 | |
| US12605877B2 (en) | Manufacturing method, manufacturing apparatus, and mold unit for resin container | |
| JP7327860B1 (ja) | 容器の製造方法、容器の製造装置、容器 | |
| EP4640405A1 (en) | Method for manufacturing container, apparatus for manufacturing container, and container | |
| US12296523B2 (en) | Method of forming a container having a hanging implement | |
| JPH0521732B2 (ja) | ||
| JP2021122951A (ja) | 容器の製造方法及び容器 | |
| KR101459526B1 (ko) | 내측에 다양한 무늬가 형성되는 블로우 성형용기 제조장치 | |
| KR20220097981A (ko) | 적층 가공을 이용하여 용기 프리폼을 제조하는 방법 | |
| EP1491321A2 (en) | Process for manufacturing bottles having at least two components, and plant for its implementation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160215 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180713 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190417 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190514 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190625 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190926 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6595361 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |