JP2017141074A - 建設機械のプラットフォーム - Google Patents
建設機械のプラットフォーム Download PDFInfo
- Publication number
- JP2017141074A JP2017141074A JP2016022182A JP2016022182A JP2017141074A JP 2017141074 A JP2017141074 A JP 2017141074A JP 2016022182 A JP2016022182 A JP 2016022182A JP 2016022182 A JP2016022182 A JP 2016022182A JP 2017141074 A JP2017141074 A JP 2017141074A
- Authority
- JP
- Japan
- Prior art keywords
- handrail
- scaffold
- construction machine
- main body
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Landscapes
- Control And Safety Of Cranes (AREA)
Abstract
Description
10 足場部固定用ピン
11 足場部角度調整用のボルト
12 ロックナット
13a 貫通孔
13 支柱
14 横杆
15a 貫通孔
15b 貫通孔
15 ホルダー
16 ホルダー支軸
17a 係止溝
17 ホルダー回動固定レバー
18 レバー支軸
19 ロッド
2 上部旋回体
2a 本体外側面
20 ホルダー取付調整ナット
21 ホルダー固定蝶ナット
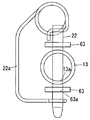
22a 抜止めピン
22 手摺り固定ピン
23 ねじりバネ
3 操縦室
4 カウンタウェイト
5 足場部
50 足場板
6 アーム
6a 貫通孔
61 ボルト保持片
62 ブラケット
63 ブラケット
63a 貫通孔
64 バネ受け部
66a 張出し状態保持用の貫通孔
66b 格納状態保持用の貫通孔
7 手摺り
71 位置決め具
8 ブラケット
80 ボルト
85 足場部保持用の貫通孔
9 支軸
A1 機械室
A 建設機械本体
P プラットフォーム
Claims (6)
- 建設機械本体の外側に張出される踏面を有する足場部と、前記足場部の張出し先端側に設けられる手摺りとを備え、この手摺りは少なくとも二本の支柱間に横杆が掛け渡されている建設機械のプラットフォームであって、前記足場部が、前記建設機械本体の本体外側面に沿った横軸を中心として、前記建設機械本体に対して外向きに突出する張出し状態と前記本体外側面に沿う格納状態との間で回動可能に設けられており、前記支柱が、前記足場部の先端部に、前記支柱が横軸まわりに回動可能にかつ前記支柱の長手方向に移動可能に設けられており、前記足場部および前記手摺りを互いに厚み方向に重なり合う状態で前記本体外側面に格納し得るように構成されていることを特徴とする建設機械のプラットフォーム。
- 前記足場部および前記手摺りが互いに厚み方向に重なり合う状態で、前記手摺りを前記足場部に対して保持させる手摺り保持手段を備えることを特徴とする請求項1記載の建設機械のプラットフォーム。
- 前記足場部の先端部に、前記本体外側面に沿った横軸まわりに回動可能なホルダーを備え、前記ホルダーは、前記支柱をその長手方向に移動可能に保持するものであることを特徴とする請求項1または2記載の建設機械のプラットフォーム。
- 張出し状態における前記ホルダーの角度を調整するホルダー角度調整手段を備えることを特徴とする請求項3記載の建設機械のプラットフォーム。
- 張出し状態における前記足場部の角度を調整する足場部角度調整手段を備えることを特徴とする請求項1ないし請求項4のいずれか一項に記載の建設機械のプラットフォーム。
- 前記足場部を格納状態となる方に付勢する付勢部材を備えることを特徴とする請求項1ないし請求項5のいずれか一項に記載の建設機械のプラットフォーム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016022182A JP6638440B2 (ja) | 2016-02-08 | 2016-02-08 | 建設機械のプラットフォーム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016022182A JP6638440B2 (ja) | 2016-02-08 | 2016-02-08 | 建設機械のプラットフォーム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017141074A true JP2017141074A (ja) | 2017-08-17 |
| JP6638440B2 JP6638440B2 (ja) | 2020-01-29 |
Family
ID=59628148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016022182A Active JP6638440B2 (ja) | 2016-02-08 | 2016-02-08 | 建設機械のプラットフォーム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6638440B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019147636A (ja) * | 2018-02-26 | 2019-09-05 | コベルコ建機株式会社 | 手摺装置及びこれを備えた作業機械 |
| JP7613294B2 (ja) | 2021-06-25 | 2025-01-15 | コベルコ建機株式会社 | 建設機械の足場構造 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6068277A (en) * | 1996-05-20 | 2000-05-30 | Access Innovations Pty, Ltd. | Access platform system for earth-moving machinery |
| JP2001071815A (ja) * | 1999-09-07 | 2001-03-21 | Tadano Ltd | 作業車のステップ装置 |
| JP2001130900A (ja) * | 1999-10-29 | 2001-05-15 | Tadano Ltd | 高所作業台用手摺 |
| JP2003147804A (ja) * | 2001-11-15 | 2003-05-21 | Hitachi Constr Mach Co Ltd | 建設機械 |
| JP2007137570A (ja) * | 2005-11-16 | 2007-06-07 | Kobelco Cranes Co Ltd | 建設機械のプラットフォーム |
-
2016
- 2016-02-08 JP JP2016022182A patent/JP6638440B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6068277A (en) * | 1996-05-20 | 2000-05-30 | Access Innovations Pty, Ltd. | Access platform system for earth-moving machinery |
| JP2001071815A (ja) * | 1999-09-07 | 2001-03-21 | Tadano Ltd | 作業車のステップ装置 |
| JP2001130900A (ja) * | 1999-10-29 | 2001-05-15 | Tadano Ltd | 高所作業台用手摺 |
| JP2003147804A (ja) * | 2001-11-15 | 2003-05-21 | Hitachi Constr Mach Co Ltd | 建設機械 |
| JP2007137570A (ja) * | 2005-11-16 | 2007-06-07 | Kobelco Cranes Co Ltd | 建設機械のプラットフォーム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019147636A (ja) * | 2018-02-26 | 2019-09-05 | コベルコ建機株式会社 | 手摺装置及びこれを備えた作業機械 |
| JP7613294B2 (ja) | 2021-06-25 | 2025-01-15 | コベルコ建機株式会社 | 建設機械の足場構造 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6638440B2 (ja) | 2020-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6231320B2 (ja) | アウトリガ連結ロック装置 | |
| JP4891731B2 (ja) | 作業機械のアンテナ脱着装置 | |
| JP2017141074A (ja) | 建設機械のプラットフォーム | |
| JP6816619B2 (ja) | フロート格納装置 | |
| JP2017030634A (ja) | 作業車両 | |
| JP2020029320A (ja) | カウンタウエイト着脱装置 | |
| JP6971674B2 (ja) | 分割型ベースウエイト | |
| JP6460132B2 (ja) | 建設機械 | |
| JP2013064239A (ja) | 建設機械の足場構造 | |
| JP6559605B2 (ja) | 補助吊上装置および補助吊上装置を備えた作業機械 | |
| JP6342775B2 (ja) | 作業車両 | |
| JP2007118795A (ja) | 建設機械 | |
| JP6492508B2 (ja) | 梯子機構 | |
| JP6610088B2 (ja) | 移動式クレーンに備えられたステップ機構 | |
| JP6721005B2 (ja) | クレーン | |
| JP4770417B2 (ja) | 建設機械のプラットフォーム | |
| JP6342773B2 (ja) | 梯子駆動装置 | |
| JP2022143384A (ja) | アウトリガ用敷板設置装置、アウトリガ | |
| JP6374822B2 (ja) | 作業機 | |
| JP4616811B2 (ja) | 軌道走行用車両搭載クレーン装置 | |
| WO2020202672A1 (ja) | 建設機械の足場装置 | |
| JP6289911B2 (ja) | 杭打機 | |
| JP2016074327A (ja) | 作業車両 | |
| JP2019138005A (ja) | 作業車両 | |
| JP2012020866A (ja) | 作業車の旋回ロック装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20181026 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20181102 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181121 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20190730 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190917 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6638440 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |