JP2017142202A - 位置検出装置 - Google Patents
位置検出装置 Download PDFInfo
- Publication number
- JP2017142202A JP2017142202A JP2016024697A JP2016024697A JP2017142202A JP 2017142202 A JP2017142202 A JP 2017142202A JP 2016024697 A JP2016024697 A JP 2016024697A JP 2016024697 A JP2016024697 A JP 2016024697A JP 2017142202 A JP2017142202 A JP 2017142202A
- Authority
- JP
- Japan
- Prior art keywords
- coil
- detection
- attenuator
- voltage
- electromotive force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 198
- 238000004364 calculation method Methods 0.000 claims abstract description 18
- 238000004804 winding Methods 0.000 claims abstract description 14
- 230000005284 excitation Effects 0.000 claims description 43
- 238000013459 approach Methods 0.000 claims description 7
- 230000008878 coupling Effects 0.000 claims description 2
- 238000010168 coupling process Methods 0.000 claims description 2
- 238000005859 coupling reaction Methods 0.000 claims description 2
- 239000000758 substrate Substances 0.000 description 14
- 239000002184 metal Substances 0.000 description 5
- 229910052751 metal Inorganic materials 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 230000001939 inductive effect Effects 0.000 description 4
- 230000002238 attenuated effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images



Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【課題】位置検出の精度を確保することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、定電圧によって励磁される励磁コイル4と、励磁コイル4と電磁結合される検出コイル5と、励磁コイル4に印加される電圧を減衰するアッテネータ6と、被検出部2の動きに応じて検出コイル5に発生する磁界を変化させる検出対象3とを備える。検出コイル5は、複数のコイル群(第1コイル部5a及び第2コイル部5b)からなる。第1コイル部5a及び第2コイル部5bは、互いに異なる巻数に形成されるとともに、流れる電流の方向が互いに逆となるように巻き方向が逆となっている。位置演算部11は、検出コイル5の誘導起電力VDE1とアッテネータ6のリファレンス電圧VDE2とを基に、検出対象3の位置を演算する。
【選択図】図1
【解決手段】位置検出装置1は、定電圧によって励磁される励磁コイル4と、励磁コイル4と電磁結合される検出コイル5と、励磁コイル4に印加される電圧を減衰するアッテネータ6と、被検出部2の動きに応じて検出コイル5に発生する磁界を変化させる検出対象3とを備える。検出コイル5は、複数のコイル群(第1コイル部5a及び第2コイル部5b)からなる。第1コイル部5a及び第2コイル部5bは、互いに異なる巻数に形成されるとともに、流れる電流の方向が互いに逆となるように巻き方向が逆となっている。位置演算部11は、検出コイル5の誘導起電力VDE1とアッテネータ6のリファレンス電圧VDE2とを基に、検出対象3の位置を演算する。
【選択図】図1
Description
本発明は、検出対象の位置を検出する位置検出装置に関する。
従来、励磁コイルから検出コイルに磁界をかけておき、例えば検出対象としての金属部の接近又は離間に応じて検出コイルにかかる磁界の変化を検出することにより、検出対象の位置(距離)を演算する位置検出装置が周知である(特許文献1,2等参照)。この種の位置検出装置は、励磁コイル及び検出コイルが電磁結合していて、検出対象の接近又は離間に応じて変化する検出コイルの誘導起電力を基に、検出対象との距離を演算する。
この種の位置検出装置においては、検出対象の位置を精度よく行いたいニーズがあった。
本発明の目的は、位置検出の精度を確保することができる位置検出装置を提供することにある。
本発明の目的は、位置検出の精度を確保することができる位置検出装置を提供することにある。
前記問題点を解決する位置検出装置は、定電圧によって励磁コイルを励磁して当該励磁コイルとの電磁結合により検出コイルに誘導起電力を発生させ、前記検出コイルに接近又は離隔する検出対象により前記誘導起電力を変化させて、前記誘導起電力を基に位置演算部により被検出部の位置を演算する構成において、前記検出コイルの要素であり、重なるように配置されるとともに巻線が逆方向に巻かれた第1コイル部及び第2コイル部と、前記励磁コイルに印加される電圧を減衰して出力するアッテネータとを備え、前記位置演算部は、前記検出コイル及びアッテネータの各出力を基に、前記検出対象の位置を演算する。
本構成によれば、検出コイルの出力と、その基準とを基に、演算により検出対象(被検出部)の位置を求めるにあたり、アッテネータによって励磁コイルの電圧を減衰し、減衰後の電圧を演算の基準として用いる。このため、アッテネータであれば、演算の基準の値を適宜設定することが可能となるので、演算の基準の最適化が可能となる。よって、位置演算の精度を確保することが可能となる。
前記位置検出装置において、前記励磁コイルは、前記第1コイル部を励磁する第1励磁コイルと、前記第2コイル部を励磁する第2励磁コイルとを備えることが好ましい。この構成によれば、励磁コイルを複数コイルとしたので、第1励磁コイルで第1コイル部を励磁し、第2励磁コイルで第2コイル部を励磁することが可能となる。よって、これらコイル群をより確実に励磁することが可能となる。
前記位置検出装置において、前記検出コイル及びアッテネータは、前記検出対象の位置検出範囲において前記検出コイルの出力の最大値と前記アッテネータの出力の最大値とが同じとなるように設定されていることが好ましい。この構成によれば、検出コイルの出力の最大値とアッテネータの出力の最大値とが等しくなるように設定されるので、検出コイル及びアッテネータの出力を検出する検出回路のダイナミックレンジを低くすることが可能となる。よって、検出コイル及びアッテネータの出力を検出回路で検出するにあたり、検出する値の誤差を低く抑えることが可能となるので、位置検出の精度を向上することが可能となる。
前記位置検出装置において、前記検出コイルが発生する誘導起電力は、正負両方の値をとり、かつ最大値及び最大値の絶対値が等しく設定されていることが好ましい。この構成によれば、検出コイルやアッテネータの出力を検出する検出回路で発生する誤差を低く抑えるのに一層有利となるので、位置検出装置の位置検出精度を向上するのに一層有利となる。
前記位置検出装置において、前記第1コイル部、第2コイル部及び励磁コイルは、同一軸心上に規定間隔を空けて並び配置されていることが好ましい。この構成によれば、これらコイル群をバランスよく配置することが可能となるので、検出コイルから所望の誘導起電力の変化を得るのに有利となる。
前記位置検出装置において、前記アッテネータは、位置検出装置のICに内蔵されていることが好ましい。この構成によれば、アッテネータがICに内蔵されていれば、仮にコイル群の形成パターン(コイルパターン)が異なる場合であっても、これらの間で同一のICを共用することが可能となる。
本発明によれば、位置検出装置において、位置検出の精度を確保することができる。
以下、位置検出装置の一実施形態を図1〜図4に従って説明する。
図1に示すように、位置検出装置1は、被検出部2の位置(被検出部2との間の距離)を検出する渦電流センサの一種である。渦電流センサは、金属(本例は検出対象3)に発生する渦電流の変化を基に被検出部2の位置を検出するセンサである。本例の位置検出装置1は、定電圧によって励磁される励磁コイル4と、励磁コイル4と電磁結合される検出コイル5と、被検出部2の動きに応じて検出コイル5に発生する磁界を変化させる検出対象3とを備える。
図1に示すように、位置検出装置1は、被検出部2の位置(被検出部2との間の距離)を検出する渦電流センサの一種である。渦電流センサは、金属(本例は検出対象3)に発生する渦電流の変化を基に被検出部2の位置を検出するセンサである。本例の位置検出装置1は、定電圧によって励磁される励磁コイル4と、励磁コイル4と電磁結合される検出コイル5と、被検出部2の動きに応じて検出コイル5に発生する磁界を変化させる検出対象3とを備える。
励磁コイル4は、複数のコイル群(第1励磁コイル4a及び第2励磁コイル4b)からなる。本例の第1励磁コイル4a及び第2励磁コイル4bは、基板(図示略)において異なる層に形成されるとともに、コイル軸Laの方向(コイル軸方向)に並んで配置(重ね配置)されている。本例の場合、第1励磁コイル4aが基板の2層目に配置され、第2励磁コイル4bが基板の3層目に配置されている。第1励磁コイル4a及び第2励磁コイル4bは、巻線径が同一のr1に形成されるとともに、流れる電流の方向が同一とされている。第1励磁コイル4a及び第2励磁コイル4bは、電源9に直列接続されるとともに、電源9から入力する定電圧振幅の交流電圧Vacによって励磁される。
検出コイル5は、複数のコイル群(第1コイル部5a及び第2コイル部5b)からなる。第1コイル部5a及び第2コイル部5bは、直列接続されるとともに、コイル軸Laの軸方向(コイル軸方向)に並んで配置(重ね配置)されている。第2コイル部5bは、基板(図示略)において第1コイル部5aと異なる層に形成されている。本例の場合、第1コイル部5aが基板の1層目に配置され、第2コイル部5bが基板の4層目に配置されている。第1励磁コイル4aは、第1コイル部5aに対向配置されて第1コイル部5aを励磁する。第2励磁コイル4bは、第2コイル部5bに対向配置されて第2コイル部5bを励磁する。
また、第1コイル部5a及び第2コイル部5bは、流れる電流の方向が互いに逆となるように、巻き方向が逆となっている。すなわち、第1コイル部5a及び第2コイル部5bは、巻き方向が互いに逆向きとされることにより、互いに逆方向の磁界が生成されるようになっている。第2コイル部5bは、巻線径rbが第1コイル部5aの巻線径raよりも小さく形成されている。第1コイル部5a及び第2コイル部5bの間には、第1励磁コイル4a及び第2励磁コイル4bが配置されている。本例の場合、第1コイル部5aが検出対象3に対し近い側に配置され、第2コイル部5bが検出対象3に対し遠い側に配置されている。
検出コイル5は、検出対象3との距離に応じた誘導起電力VDE1を発生する。検出コイル5の誘導起電力VDE1は、第1コイル部5aに発生する誘導起電力Vaと第2コイル部5bに発生する誘導起電力Vbとに基づく値をとる。なお、第2コイル部5bは、検出対象3から遠い場所に位置しているので、誘導起電力Vbが変化し難い。このため、検出対象3が検出コイル5に接近又は離隔したとき、誘導起電力VDE1の変化量を大きくとることが可能である。
第1励磁コイル4a、第2励磁コイル4b、第1コイル部5a及び第2コイル部5bは、コイル軸Laに沿って同一軸心上に規定間隔を空けて並び配置(重ね配置)されている。また、これらコイル群は、同一基板上に形成されることが好ましい。検出対象3は、コイル群の配列方向、すなわちコイル軸方向(図1の矢印Z方向)方向に直線往復動する。本例のコイル群は、検出対象3側から順に、第1コイル部5a、第1励磁コイル4a、第2励磁コイル4b、第2コイル部5bの順番に配置されている。
位置検出装置1は、リファレンスコイルの代替として設けられたアッテネータ(減衰器)6を備える。アッテネータ6は、励磁コイル4に電圧を印加する電源9の入出力端に接続されている。アッテネータ6は、励磁コイル4へ印加される交流波形の電圧(交流電圧Vac)を減衰し、これをリファレンス電圧VDE2として変換出力する。
検出コイル5及びアッテネータ6には、検出コイル5及びアッテネータ6の出力を検出する検出回路10が接続されている。本例の検出回路10は、検出コイル5の出力(誘導起電力VDE1)を検出する電圧検出部10aと、アッテネータ6の出力(リファレンス電圧VDE2)を検出する電圧検出部10bとを備える。電圧検出部10aは、検出コイル5の入出力端の間に接続され、電圧検出部10bは、アッテネータ6の入出力端の間に接続されている。
検出対象3は、例えば平板状の金属板(金属部)により形成され、検出コイル5の第1コイル部5aを覆うことが可能な形状に形成されている。検出対象3は、検出コイル5(励磁コイル3)のコイル軸方向(図1の矢印Z方向)に沿って往復動する動きをとり、被検出部2の動きに合わせて、検出コイル5(第1コイル部5a)に接近又は離隔するように直線往復動する。検出対象3は、導電体(例えば銅など)から形成されることが好ましい。
位置検出装置1は、検出コイル5及びアッテネータ6の出力(誘導起電力VDE1、リファレンス電圧VDE2)を基に検出対象3の位置を演算する位置演算部11を備える。位置演算部11は、電圧検出部10aで検出される誘導起電力VDE1と、電圧検出部10bで検出されるリファレンス電圧VDE2とを基に、検出対象3(被検出部2)の位置を演算する。具体的にいうと、位置演算部11は、電圧検出部10aの出力を、電圧検出部10bの出力で除算した値(VDE1/VDE2)を求め、この値から検出コイル5と検出対象3の位置、すなわち被検出部2の位置を演算する。
次に、図1〜図4を用いて、位置検出装置1の作用及び効果を説明する。
図1に示すように、電源9から励磁コイル4に定電圧振幅の交流電圧Vacが印加されると、検出コイル5には、検出対象3との距離に応じた誘導起電力VDE1が発生する。誘導起電力VDE1は、同図に示される式(α)から求まる。図1の式(α)からも分かるように、検出コイル5の誘導起電力VDE1の演算には、主に、励磁コイル4及び検出コイル5の相互インダクタンスM、検出対象3を流れる励磁電流IEX、励磁コイル4の自己インダクタンスLEXの各パラメータが関係する。
図1に示すように、電源9から励磁コイル4に定電圧振幅の交流電圧Vacが印加されると、検出コイル5には、検出対象3との距離に応じた誘導起電力VDE1が発生する。誘導起電力VDE1は、同図に示される式(α)から求まる。図1の式(α)からも分かるように、検出コイル5の誘導起電力VDE1の演算には、主に、励磁コイル4及び検出コイル5の相互インダクタンスM、検出対象3を流れる励磁電流IEX、励磁コイル4の自己インダクタンスLEXの各パラメータが関係する。
また、アッテネータ6は、励磁コイル4への印加電圧(交流電圧Vac)を入力し、これを減衰して、リファレンス電圧VDE2として電圧検出部10bに出力する。励磁コイル4に印加される交流電圧Vacは一定振幅波形の電圧であるので、これをリファレンス電圧VDE2として用いても何ら問題はない。
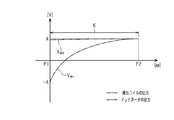
図2に示すように、位置検出装置1の位置検出範囲Kにおいて、検出対象3が検出コイル5に最も近づいた地点P1から、検出コイル5から最も離れた地点P2に直線移動したとする。このとき、検出対象3が離れていくに従い、検出コイル5の出力(誘導起電力VDE1)は、大きく右肩上がりの曲線に沿い増加していく波形変化をとる。本例の場合、検出対象3に近い検出コイル5の誘導起電力VDE1は、低い値(図中の−A)から大きく増加し、高い値(図中のA)に変位する。また、アッテネータ6の出力(リファレンス電圧VDE2)は、検出対象3が離れていくに従い、僅かながら増加する波形変化をとる。
このように、検出コイル5の誘導起電力VDE1とアッテネータ6のリファレンス電圧VDE2とは、検出対象3の位置に応じて異なる値をとる。そして、位置演算部11は、VDE1/VDE2を演算し、この値から検出対象3の位置、すなわち被検出部2の位置を求める。
図3に、従来位置付けの位置検出装置31の構成を示す。同図の従来位置付けの位置検出装置31の場合、リファレンス電圧VDE2をアッテネータ6ではなくリファレンスコイル32で検出する構成をとっている。リファレンスコイル32は、例えば第2コイル部5bと同一層(基板の同じ層)に設けられるとともに、第2コイル部5bの周囲に配置されている。リファレンスコイル32は、励磁コイル4の変動をキャンセルするためのものである。位置検出装置31は、検出コイル5の誘導起電力VDE1と、リファレンスコイル32のリファレンス電圧VDE2とを基にVDE1/VDE2を演算し、この除算値から検出対象3の位置を求める。
ところで、リファレンスコイル32は、配置の関係上、巻数が1巻きに限定される。このため、リファレンス電圧VDE2の最適化が困難な現状があった。これは、位置検出装置31の検出精度の向上に支障を来す。また、従来の構成の場合、リファレンスコイル32が必要となるので、4層目の第2コイル部5bの大きさの自由度が低くなり、このこともリファレンス電圧VDE2の最適化の支障となる。
一方、本例の位置検出装置1の場合、リファレンスコイル32の代わりにアッテネータ6を設け、励磁コイル4への印加電圧(交流電圧Vac)をアッテネータ6で減衰させ、減衰後の電圧をリファレンス電圧VDE2として用いる構成とした。このように、アッテネータ6からリファレンス電圧VDE2を得るようにすれば、アッテネータ6の特性値を適宜設定することにより、リファレンス電圧VDE2を所望値に設定することが可能となる。よって、リファレンス電圧VDE2の最適化が可能となるので、位置検出装置1の位置検出精度の確保に有利となる。ひいては、位置検出装置1(渦電流センサ)の設計自由度も向上することができ、さらには回路の設計工数の低減にも繋がる。
また、本例の位置検出装置1の場合、相互インダクタンスMの絶対値は、検出対象3との距離が近くなるほど大きくなる。一方、検出対象3の接近に伴い励磁コイル4の自己インダクタンスLEXは低下するので、励磁電流IEXは検出対象3との距離が近くなるほど増加する。このため、本例の位置検出装置1の場合、誘導起電力VDE1の要素である相互インダクタンスM及び励磁電流IEXが、検出対象3の移動時において同じ方向に変化(増減)するので、大きな誘導起電力VDE1の変化を得ることが可能となる。よって、位置検出装置1の位置検出の分解能向上に寄与する。
ところで、検出回路10には、入力電圧範囲(検出電圧のダイナミックレンジ)が決まっており、検出コイル5及びアッテネータ6の出力の最大値に設定される。一般的に、検出回路10には検出誤差が生じ、誤差は検出回路10のダイナミックレンジに対し、その何%の値で発生する。よって、検出回路10のダイナミックレンジが高いと、その分だけ位置検出の誤差が大きくなってしまうことになる。
これを踏まえ、本例の場合、検出コイル5の出力(誘導起電力VDE1)の最大値と、アッテネータ6の出力(リファレンス電圧VDE2)の最大値とを同一とすることが好ましい。こうすれば、検出回路10のダイナミックレンジが低く済むので、その分、検出回路10において発生する誤差が少なく済む。よって、位置検出装置1の位置検出精度を確保するのに有利となる。
また、検出コイル5で発生する誘導起電力VDE1(誘導電圧の振幅A)は、正負両方の値をとり、かつ最大値と最小値との絶対値が等しいことが好ましい。本例の場合、図3に示すように、例えば誘導起電力VDE1を、−A[V]〜+A[V]の範囲で変化させる。例えば、Aが2Vの場合には、検出コイル5にDCオフセット電圧を2V加えると、「誘導電圧+DCオフセット電圧」は0〜4Vの範囲となる。このため、検出回路10のダイナミックレンジは0〜4Vで済む。そして、Aが−2Vの場合でも、「誘導電圧+DCオフセット電圧」は同じく0〜4Vの範囲に収まるので、同一のダイナミックレンジで検出することが可能となる。以上から、検出回路10で発生する誤差を低く抑えるのに一層有利となるので、位置検出装置1の位置検出精度を向上するのに一層有利となる。
励磁コイル4、第1コイル部5a及び第2コイル部5bは、コイル軸Laに沿い同一軸心上に規定間隔を空けて配置されている。よって、これらコイル群をバランスよく配置することが可能となるので、検出コイル5から所望の誘導起電力VDE1の変化を得るのに有利となる。
図4に示すように、アッテネータ6は、位置検出装置1のIC(Integrated Circuit)35に内蔵されていることが好ましい。IC35は、位置検出装置1においてコイル出力を基に位置演算を行うコントローラである。また、IC35には、検出系、印加電圧系、位置演算部11も内蔵されることが好ましい。アッテネータ6がIC35に内蔵されていれば、仮にコイル群の形成パターン(コイルパターン)が異なる場合であっても、これらの間で同一のIC35を共用することができる。
なお、実施形態はこれまでに述べた構成に限らず、以下の態様に変更してもよい。
・アッテネータ6は、励磁コイル4の電流経路上であれば、どこに接続されてもよい。
・励磁コイル4及び第1コイル部5aは、同じ巻線径で形成されることに限らず、異なる巻線径で形成されてもよい。
・アッテネータ6は、励磁コイル4の電流経路上であれば、どこに接続されてもよい。
・励磁コイル4及び第1コイル部5aは、同じ巻線径で形成されることに限らず、異なる巻線径で形成されてもよい。
・励磁コイル4は、第1コイル部5aよりも巻線径が大きく形成されてもよい。
・励磁コイル4は、複数コイルからなることに限定されず、1つとしてもよい。
・第1コイル部5a及び第2コイル部5bは、異なる巻線径に形成されることに限らず、同じとしてもよい。
・励磁コイル4は、複数コイルからなることに限定されず、1つとしてもよい。
・第1コイル部5a及び第2コイル部5bは、異なる巻線径に形成されることに限らず、同じとしてもよい。
・コイル群(励磁コイル4、第1コイル部5a、第2コイル部5b)は、同一軸心上に配置されない配置パターンでもよい。
・励磁コイル4、第1コイル部5a及び第2コイル部5bのコイル形状(巻線形状)は、四角形状に限定されず、例えば円形状などの他の形状に変更可能である。
・励磁コイル4、第1コイル部5a及び第2コイル部5bのコイル形状(巻線形状)は、四角形状に限定されず、例えば円形状などの他の形状に変更可能である。
・検出コイル5及びアッテネータ6と電圧検出部(本例でいう電圧検出部10a,10b)との接続を、スイッチにより時分割制御して、検出コイル5及びアッテネータ6の出力を、1つの電圧検出部によって選択的に検出する構成でもよい。こうすれば、位置検出装置1に必要となる電圧検出部が少なく済むので、装置サイズの小型化に有利となる。
・検出対象3は、導体板(金属板)に限らず、例えばコイルなどの他の部材に変更可能である。すなわち、渦電流を発生できる部材であればよい。
・コイル群が設けられる基板は、多層基板でもよく、多層基板の所定層に検出コイル5が配置されてもよい。
・コイル群が設けられる基板は、多層基板でもよく、多層基板の所定層に検出コイル5が配置されてもよい。
・検出コイル5は、基板の複数層に横断して形成されてもよい。
・コイル群は、同一基板上に形成されることに限らず、異なる基板に設けられてもよい。
・コイル群は、同一基板上に形成されることに限らず、異なる基板に設けられてもよい。
・検出コイル5及びアッテネータ6の間の電圧を検出するとともに、アッテネータ6の電圧を検出し、これらを除算した結果から検出対象3の位置を求めてもよい。
・被検出部2の位置検出時に行う演算は、除算に限定されず、他の計算方法に変更してもよい。
・被検出部2の位置検出時に行う演算は、除算に限定されず、他の計算方法に変更してもよい。
・位置検出の演算に用いるコイル出力は、電圧値に限らず、例えば電流値などの他のパラメータとしてもよい。
・位置検出装置1は、種々の機器や装置に適用可能である。
・位置検出装置1は、種々の機器や装置に適用可能である。
1…位置検出装置、2…被検出部、3…検出対象、4…励磁コイル、4a…第1励磁コイル、4b…第2励磁コイル、5…検出コイル、5a…第1コイル部、5b…第2コイル部、6…アッテネータ、11…位置演算部、35…IC、VDE1…誘導起電力、VDE2…リファレンス電圧、K…位置検出範囲。
Claims (6)
- 定電圧によって励磁コイルを励磁して当該励磁コイルとの電磁結合により検出コイルに誘導起電力を発生させ、前記検出コイルに接近又は離隔する検出対象により前記誘導起電力を変化させて、前記誘導起電力を基に位置演算部により被検出部の位置を演算する位置検出装置において、
前記検出コイルの要素であり、重なるように配置されるとともに巻線が逆方向に巻かれた第1コイル部及び第2コイル部と、
前記励磁コイルに印加される電圧を減衰して出力するアッテネータとを備え、
前記位置演算部は、前記検出コイル及びアッテネータの各出力を基に、前記検出対象の位置を演算する
ことを特徴とする位置検出装置。 - 前記励磁コイルは、前記第1コイル部を励磁する第1励磁コイルと、前記第2コイル部を励磁する第2励磁コイルとを備える
請求項1に記載の位置検出装置。 - 前記検出コイル及びアッテネータは、前記検出対象の位置検出範囲において前記検出コイルの出力の最大値と前記アッテネータの出力の最大値とが同じとなるように設定されている
請求項1又は2に記載の位置検出装置。 - 前記検出コイルが発生する誘導起電力は、正負両方の値をとり、かつ最大値及び最大値の絶対値が等しく設定されている
請求項1〜3のうちいずれか一項に記載の位置検出装置。 - 前記第1コイル部、第2コイル部及び励磁コイルは、同一軸心上に規定間隔を空けて並び配置されている
請求項1〜4のうちいずれか一項に記載の位置検出装置。 - 前記アッテネータは、位置検出装置のICに内蔵されている
請求項1〜5のうちいずれか一項に記載の位置検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016024697A JP2017142202A (ja) | 2016-02-12 | 2016-02-12 | 位置検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016024697A JP2017142202A (ja) | 2016-02-12 | 2016-02-12 | 位置検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017142202A true JP2017142202A (ja) | 2017-08-17 |
Family
ID=59628549
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016024697A Pending JP2017142202A (ja) | 2016-02-12 | 2016-02-12 | 位置検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017142202A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210043425A (ko) * | 2019-10-11 | 2021-04-21 | 티디케이가부시기가이샤 | 회전 전기 기기 |
| CN116609545A (zh) * | 2022-02-09 | 2023-08-18 | 中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院) | 基于多励磁-接收模组的测速定位系统 |
-
2016
- 2016-02-12 JP JP2016024697A patent/JP2017142202A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210043425A (ko) * | 2019-10-11 | 2021-04-21 | 티디케이가부시기가이샤 | 회전 전기 기기 |
| KR102522731B1 (ko) | 2019-10-11 | 2023-04-19 | 티디케이가부시기가이샤 | 회전 전기 기기 |
| CN116609545A (zh) * | 2022-02-09 | 2023-08-18 | 中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院) | 基于多励磁-接收模组的测速定位系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6364092B2 (ja) | リニアアクチュエータにおける誘導位置センシング | |
| US10508932B2 (en) | Measuring the position of an object using eddy-currents | |
| US9638823B2 (en) | Metal sensor | |
| CN108627078B (zh) | 电磁感应式位移检测设备及使用该设备的测量仪器 | |
| JP6272500B2 (ja) | 磁気流量計のための改善された磁性コア構成 | |
| JP7001386B2 (ja) | 速度検出装置及び速度検出方法 | |
| CN106104210A (zh) | 位置测量设备和用于操作位置测量设备的方法 | |
| JP2017142202A (ja) | 位置検出装置 | |
| JP2000295832A (ja) | 位置検出装置 | |
| US20090302699A1 (en) | Method for mounting a body | |
| JP6427658B2 (ja) | アクチュエータ/センサ装置および当該装置で使用する方法 | |
| US8482299B2 (en) | Method for detecting the position of an armature of an electromagnetic actuator | |
| JP2017122671A (ja) | 電流検出器および電流検出方法 | |
| JP6395942B2 (ja) | 位置センサー | |
| JP2017142201A (ja) | 位置検出装置 | |
| JP2017075919A (ja) | 位置検出装置 | |
| JP6155715B2 (ja) | 変位センサ | |
| JP6145467B2 (ja) | 位置検出装置 | |
| US20150355361A1 (en) | Sensor for Locating Metal or Magnetic Objects | |
| WO2017138479A1 (ja) | 位置検出装置 | |
| JP2016125940A (ja) | 位置検出装置 | |
| KR20180085189A (ko) | 코일 설계를 위한 변수 제공 방법 및 이를 위한 장치 | |
| JP2016090397A (ja) | 位置検出装置 | |
| JP2014092432A (ja) | 検知装置 | |
| Reinholz | A novel wide-bandwidth linear inductive differential position sensor |