JP2017148982A - 液体吐出装置、ヘッドユニット制御回路、及び、液体吐出装置の検査方法 - Google Patents
液体吐出装置、ヘッドユニット制御回路、及び、液体吐出装置の検査方法 Download PDFInfo
- Publication number
- JP2017148982A JP2017148982A JP2016031693A JP2016031693A JP2017148982A JP 2017148982 A JP2017148982 A JP 2017148982A JP 2016031693 A JP2016031693 A JP 2016031693A JP 2016031693 A JP2016031693 A JP 2016031693A JP 2017148982 A JP2017148982 A JP 2017148982A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- discharge
- ejection
- liquid
- residual vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Ink Jet (AREA)
- Particle Formation And Scattering Control In Inkjet Printers (AREA)
Abstract
【課題】吐出部における液体の吐出状態の判定において誤判定の発生を抑制する。【解決手段】液体を吐出する吐出部と、吐出部を駆動する駆動部と、吐出部が駆動部により駆動されたときに吐出部に生じる残留振動を検出する検出部と、検出部の検出結果に基づいて残留振動の特性を示す特性情報を生成する特性情報生成部と、駆動部による吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成する基準情報生成部と、特性情報及び基準情報に基づいて、吐出部における液体の吐出状態を判定する判定部と、を備える、ことを特徴とする液体吐出装置。【選択図】図1
Description
本発明は、液体吐出装置、ヘッドユニット制御回路、及び、液体吐出装置の検査方法に関する。
インクジェットプリンター等の液体吐出装置は、吐出部を駆動して、当該吐出部に設けられた圧電素子を変位させることにより、吐出部のキャビティ(圧力室)に充填されたインク等の液体を吐出させ、記録媒体に画像を形成する印刷処理を実行する。このような液体吐出装置において、キャビティ内の液体の増粘や、吐出部への異物の付着等により、吐出部から液体を正常に吐出できなくなる吐出異常が生じる場合がある。そして、吐出異常が生じると、吐出部から吐出される液体により記録媒体に形成される予定のドットを正確に形成できなくなり、印刷処理において記録媒体に形成される画像の画質が低下する。
特許文献1には、印刷処理において形成される画像の画質の低下を防止するために、吐出部を駆動させた際に当該吐出部から検出される残留振動の特性に基づいて、当該吐出部における液体の吐出状態を判定し、当該判定結果を用いて吐出異常を検出する技術が提案されている。
特許文献1には、印刷処理において形成される画像の画質の低下を防止するために、吐出部を駆動させた際に当該吐出部から検出される残留振動の特性に基づいて、当該吐出部における液体の吐出状態を判定し、当該判定結果を用いて吐出異常を検出する技術が提案されている。
ところで、液体の吐出状態が正常な吐出部において液体の吐出頻度が低い場合に当該吐出部から検出される残留振動の特性と、吐出異常が生じている吐出部から検出される残留振動の特性と、が類似することがある。このため、吐出部における液体の吐出状態の判定において、誤判定が生じることがあった。
本発明は、上述した事情に鑑みてなされたものであり、吐出部における液体の吐出状態の判定において誤判定の発生を抑制する技術の提供を解決課題の一つとする。
以上の課題を解決するために、本発明に係る液体吐出装置は、液体を吐出する吐出部と、前記吐出部を駆動する駆動部と、前記吐出部が前記駆動部により駆動されたときに前記吐出部に生じる残留振動を検出する検出部と、前記検出部の検出結果に基づいて前記残留振動の特性を示す特性情報を生成する特性情報生成部と、前記駆動部による前記吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成する基準情報生成部と、前記特性情報及び前記基準情報に基づいて、前記吐出部における液体の吐出状態を判定する判定部と、を備える、ことを特徴とする。
本発明では、吐出部の駆動の履歴に応じて定めた基準値を用いて、当該吐出部における液体の吐出状態を判定するため、吐出部からの液体の吐出頻度が低い場合と、吐出部において吐出異常が生じている場合と、を区別することが可能となる。このため、吐出状態の判定において誤判定が生じる可能性を低減することが可能となる。
上述した液体吐出装置において、前記基準情報生成部は、所定期間における前記吐出部からの液体の吐出の頻度に応じて、前記基準値を定める、ことを特徴としてもよい。
この態様によれば、吐出部からの液体の吐出頻度に応じた基準値を用いて、当該吐出部における液体の吐出状態を判定するため、吐出部からの液体の吐出頻度が低い場合と、吐出部において吐出異常が生じている場合と、を区別し、吐出状態の判定において誤判定が生じる可能性を低減することが可能となる。
上述した液体吐出装置において、前記特性情報は、前記残留振動の周期を示し、前記判定部は、前記特性情報の示す前記残留振動の周期が、前記基準値よりも大きい場合に、前記吐出部における液体の吐出状態が異常であると判定する、ことを特徴としてもよい。
この態様によれば、吐出部からの液体の吐出頻度に応じた基準値を用いて、当該吐出部における液体の吐出状態を判定するため、吐出部からの液体の吐出頻度が低い場合と、吐出部において吐出異常が生じている場合と、を区別し、吐出状態の判定において誤判定が生じる可能性を低減することが可能となる。
上述した液体吐出装置において、前記基準情報生成部は、前記所定期間における前記吐出部からの液体の吐出の頻度が第1の頻度である場合、第1の値を前記基準値として定め、前記所定期間における前記吐出部からの液体の吐出の頻度が、前記第1の頻度よりも低い第2の頻度である場合、前記第1の値よりも大きい第2の値を前記基準値として定める、ことを特徴としてもよい。
この態様によれば、吐出部からの液体の吐出頻度が高い頻度である第1の頻度である場合に、基準値を小さい値である第1の値とし、吐出部からの液体の吐出頻度が低い頻度である第2の頻度である場合に、基準値を大きい値である第2の値とする。このため、紙粉等の異物の付着により吐出異常が生じている吐出部については、第1の値を基準値として吐出状態を判定することで、当該吐出部において吐出異常が生じていることを検出することが可能となり、他方、液体の吐出頻度が低く、吐出異常が生じない程度に増粘が生じている吐出部については、第2の値を基準値として吐出状態を判定することで、当該吐出部において吐出異常が生じていないことを検出することが可能となる。これにより、吐出部からの液体の吐出頻度が低い場合と、吐出部において吐出異常が生じている場合と、を区別し、吐出状態の判定において誤判定が生じる可能性を低減することが可能となる。
また、本発明に係る液体吐出装置は、吐出部から液体を吐出する液体吐出装置であって、複数の前記吐出部を具備する記録ヘッドと、前記記録ヘッドに設けられた複数の吐出部の各々を駆動可能な駆動部と、前記複数の吐出部のうち一の吐出部が前記駆動部により駆動されたときに前記一の吐出部に生じる残留振動を検出する検出部と、前記検出部の検出結果に基づいて前記残留振動の特性を示す特性情報を生成する特性情報生成部と、前記駆動部による前記複数の吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成する基準情報生成部と、前記特性情報及び前記基準情報に基づいて、前記一の吐出部における液体の吐出状態を判定する判定部と、を備える、ことを特徴とする。
この発明によれば、吐出部からの液体の吐出頻度に応じた基準値を用いて、当該吐出部における液体の吐出状態を判定するため、吐出部からの液体の吐出頻度が低い場合と、吐出部において吐出異常が生じている場合と、を区別し、吐出状態の判定において誤判定が生じる可能性を低減することが可能となる。
また、この発明によれば、記録ヘッドに設けられた複数の吐出部において共通の基準値を用いて、各吐出部における液体の吐出状態を判定するため、基準値の生成に係る処理負荷を軽減することができる。
また、この発明によれば、記録ヘッドに設けられた複数の吐出部において共通の基準値を用いて、各吐出部における液体の吐出状態を判定するため、基準値の生成に係る処理負荷を軽減することができる。
また、本発明に係るヘッドユニット制御回路は、液体を吐出する吐出部と、前記吐出部を駆動する駆動部と、前記吐出部が前記駆動部により駆動されたときに前記吐出部に生じる残留振動を検出する検出部と、を具備するヘッドユニットを制御するヘッドユニット制御回路であって、前記検出部の検出結果に基づいて前記残留振動の特性を示す特性情報を生成する特性情報生成部と、前記駆動部による前記吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成する基準情報生成部と、記特性情報及び前記基準情報に基づいて、前記吐出部における液体の吐出状態を判定する判定部と、を備える、ことを特徴とする。
この発明によれば、吐出部からの液体の吐出頻度に応じた基準値を用いて、当該吐出部における液体の吐出状態を判定するため、吐出部からの液体の吐出頻度が低い場合と、吐出部において吐出異常が生じている場合と、を区別し、吐出状態の判定において誤判定が生じる可能性を低減することが可能となる。
また、本発明に係る液体吐出装置の検査方法は、液体を吐出する吐出部と、前記吐出部を駆動する駆動部と、前記吐出部が前記駆動部により駆動されたときに前記吐出部に生じる残留振動を検出する検出部と、を具備する液体吐出装置の検査方法であって、前記検出部の検出結果に基づいて前記残留振動の特性を示す特性情報を生成するステップと、前記駆動部による前記吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成するステップと、前記特性情報及び前記基準情報に基づいて、前記吐出部における液体の吐出状態を判定するステップと、を備える、ことを特徴とする。
この発明によれば、吐出部からの液体の吐出頻度に応じた基準値を用いて、当該吐出部における液体の吐出状態を判定するため、吐出部からの液体の吐出頻度が低い場合と、吐出部において吐出異常が生じている場合と、を区別し、吐出状態の判定において誤判定が生じる可能性を低減することが可能となる。
以下、本発明を実施するための形態について図面を参照して説明する。ただし、各図において、各部の寸法及び縮尺は、実際のものと適宜に異ならせてある。また、以下に述べる実施の形態は、本発明の好適な具体例であるから、技術的に好ましい種々の限定が付されているが、本発明の範囲は、以下の説明において特に本発明を限定する旨の記載がない限り、これらの形態に限られるものではない。
<<A.実施形態>>
本実施形態では、インク(「液体」の一例)を吐出して記録用紙P(「媒体」の一例)に画像を形成するインクジェットプリンターを例示して、液体吐出装置を説明する。
本実施形態では、インク(「液体」の一例)を吐出して記録用紙P(「媒体」の一例)に画像を形成するインクジェットプリンターを例示して、液体吐出装置を説明する。
<<1.インクジェットプリンターの概要>>
図1及び図2を参照しつつ、本実施形態に係るインクジェットプリンター1の構成について説明する。なお、図1は、本実施形態に係るインクジェットプリンター1の構成の一例を示す機能ブロック図である。また、図2は、インクジェットプリンター1の概略的な内部構造の一例を示す斜視図である。
図1及び図2を参照しつつ、本実施形態に係るインクジェットプリンター1の構成について説明する。なお、図1は、本実施形態に係るインクジェットプリンター1の構成の一例を示す機能ブロック図である。また、図2は、インクジェットプリンター1の概略的な内部構造の一例を示す斜視図である。
インクジェットプリンター1には、パーソナルコンピューターやデジタルカメラ等のホストコンピューター(図示省略)から、インクジェットプリンター1が形成すべき画像を示す印刷データImgと、インクジェットプリンター1が形成すべき画像の印刷部数を示す情報と、が供給される。インクジェットプリンター1は、ホストコンピューターから供給される印刷データImgの示す画像を記録用紙Pに形成する印刷処理を実行する。
図1に例示するように、インクジェットプリンター1は、インクを吐出する吐出部Dが設けられたヘッドユニットHUを複数個具備するヘッドモジュールHMと、ヘッドモジュールHMに対する記録用紙Pの相対位置を変化させるための搬送機構7と、インクジェットプリンター1の各部の動作を制御する制御部6と、各種情報を記憶する記憶部8と、を備える。
制御部6は、CPU(Central Processing Unit)と、DA変換回路とを含んで構成される。なお、制御部6は、CPUの代わりに、FPGA(field-programmable gate array)等のプログラマブルロジックデバイスを備えるものでよい。
制御部6は、CPUが、記憶部8に記憶されている制御プログラムに従って動作することで、インクジェットプリンター1の各部の動作を制御するための各種信号を出力する。具体的には、制御部6は、印刷信号SIや駆動波形信号Com等のヘッドユニットHUを制御するための信号と、搬送機構7を制御するための信号と、を生成する。
制御部6は、CPUが、記憶部8に記憶されている制御プログラムに従って動作することで、インクジェットプリンター1の各部の動作を制御するための各種信号を出力する。具体的には、制御部6は、印刷信号SIや駆動波形信号Com等のヘッドユニットHUを制御するための信号と、搬送機構7を制御するための信号と、を生成する。
ここで、駆動波形信号Comとは、吐出部Dを駆動するためのアナログの信号である。制御部6は、駆動波形信号Comを生成する場合、例えば、CPUにおいて駆動波形信号Comの波形を規定するデジタルの駆動波形信号を生成し、DA変換回路において当該デジタルの駆動波形信号をアナログの駆動波形信号Comに変換する。なお、詳細は後述するが、本実施形態において、駆動波形信号Comは、駆動波形信号Com-Aと駆動波形信号Com-Bとを含む。
また、印刷信号SIとは、吐出部Dの駆動の態様を指定するためのデジタルの信号である。具体的には、印刷信号SIは、吐出部Dに対して駆動波形信号Comを供給するか否かを指定することで、吐出部Dの駆動の態様を指定する信号である。ここで、吐出部Dの駆動の態様の指定とは、例えば、吐出部Dを駆動した際に当該吐出部Dからインクが吐出されるか否かを指定したり、また、吐出部Dを駆動した際に当該吐出部Dから吐出されるインク量を指定したりすることである。
また、印刷信号SIとは、吐出部Dの駆動の態様を指定するためのデジタルの信号である。具体的には、印刷信号SIは、吐出部Dに対して駆動波形信号Comを供給するか否かを指定することで、吐出部Dの駆動の態様を指定する信号である。ここで、吐出部Dの駆動の態様の指定とは、例えば、吐出部Dを駆動した際に当該吐出部Dからインクが吐出されるか否かを指定したり、また、吐出部Dを駆動した際に当該吐出部Dから吐出されるインク量を指定したりすることである。
図1に例示するように、各ヘッドユニットHUには、M個の吐出部Dを具備する記録ヘッドHDが設けられる(Mは、1≦Mを満たす自然数)。なお、以下では、各記録ヘッドHDに設けられたM個の吐出部Dを、順番に、1段、2段、…、M段と称することがある。また、m段の吐出部Dを、吐出部D[m]と称する場合がある(変数mは、1≦m≦Mを満たす自然数)。また、インクジェットプリンター1の構成要素や信号等が、吐出部D[m]の段数mに対応するものである場合には、当該構成要素や信号等を表わすための符号に、段数mに対応することをを示すための添え字[m]を付して表現することがある。
図1に例示するように、各ヘッドユニットHUには、駆動回路10(「駆動部」の一例)と、検出回路20(「検出部」の一例)と、が設けられる。
駆動回路10は、印刷信号SIと駆動波形信号Comとに基づいて駆動信号Vinを生成し、当該駆動信号Vinにより吐出部Dを駆動する。詳細は後述するが、駆動信号Vinとは、印刷信号SIにより吐出部Dに供給されることが指定された駆動波形信号Comである。以下では、吐出部D[m]に供給される駆動信号Vinを駆動信号Vin[m]と称する。また、駆動回路10は、印刷信号SIに基づいて、駆動信号Vin[m]により駆動された吐出部D[m]から検出される検出信号Vout[m]を検出回路20に供給するか否かを切り替える。
検出回路20は、駆動信号Vin[m]により駆動された吐出部D[m]から検出した検出信号Vout[m]に基づいて、吐出部D[m]が駆動された後に吐出部D[m]において残留している振動(以下、「残留振動」と称する)の波形を示すための残留振動信号NSA[m]を生成する。
検出回路20は、駆動信号Vin[m]により駆動された吐出部D[m]から検出した検出信号Vout[m]に基づいて、吐出部D[m]が駆動された後に吐出部D[m]において残留している振動(以下、「残留振動」と称する)の波形を示すための残留振動信号NSA[m]を生成する。
本実施形態に係るインクジェットプリンター1は、図1に例示するように、検出回路20から出力される残留振動信号NSA[m]の特性示すための特性情報Infoを生成する特性情報生成回路9(「特性情報生成部」の一例)を複数個具備する特性情報生成モジュールCMを備える。ここで、残留振動信号NSA[m]の特性とは、例えば、残留振動信号NSA[m]の周期、振幅、位相等、残留振動信号NSA[m]の波形に係る性質を示す情報である。本実施形態では、残留振動信号NSA[m]の特性として、残留振動信号NSA[m]の周期及び振幅を考慮する場合を一例として説明する。すなわち、本実施形態では、特性情報Infoが、残留振動信号NSA[m]の周期Tc[m]を示す情報である周期情報Info-Tと、残留振動信号NSA[m]の振幅に関する情報である振幅情報Info-Sと、を含む場合を想定する。
なお、本実施形態では、図1に例示するように、ヘッドモジュールHMが、4個のヘッドユニットHUを備え、特性情報生成モジュールCMが、4個の特性情報生成回路9を備える場合を想定する。すなわち、本実施形態では、特性情報生成回路9及びヘッドユニットHUが、1対1に対応して設けらる場合を想定する。以下では、4個のヘッドユニットHUのうち一のヘッドユニットHUと、4個の特性情報生成回路9のうち一のヘッドユニットHUに対応して設けられた一の特性情報生成回路9について説明するが、当該説明は、他のヘッドユニットHU及び他の特性情報生成回路9についても同様に該当する。
本実施形態では、インクジェットプリンター1がシリアルプリンターである場合を想定する。具体的には、インクジェットプリンター1は、副走査方向に記録用紙Pを搬送し主走査方向にヘッドモジュールHMを移動させつつ、吐出部Dからインクを吐出することで、印刷処理を実行する。以下、図2に示すように、+Y方向及び−Y方向(以下、+Y方向及び−Y方向を「Y軸方向」と総称する)が主走査方向であり、+X方向(以下、+X方向及び−X方向を「X軸方向」と総称する)が副走査方向とする。
図2に例示するように、本実施形態に係るインクジェットプリンター1は、筐体200と、筐体200内をY軸方向に往復動可能でありヘッドモジュールHMを搭載するキャリッジ100と、を備える。
搬送機構7は、印刷処理が実行される場合に、キャリッジ100をY軸方向に往復動させるとともに、記録用紙Pを+X方向に搬送することで、記録用紙PのヘッドモジュールHMに対する相対位置を変化させ、記録用紙Pの全体に対してインクが着弾することを可能とする。
具体的には、搬送機構7は、図1に示すように、キャリッジ100を往復動させるための駆動源となる搬送モーター71と、搬送モーター71を駆動するためのモータードライバー72と、記録用紙Pを搬送するための駆動源となる給紙モーター73と、給紙モーター73を駆動するためのモータードライバー74と、を具備する。また、搬送機構7は、図2に示すように、Y軸方向に延在するキャリッジガイド軸76と、搬送モーター71により回転駆動されるプーリー711と回転自在なプーリー712との間に掛け渡されY軸方向に延在するタイミングベルト710と、を具備する。キャリッジ100は、キャリッジガイド軸76によりY軸方向に往復自在に支持されるとともに、固定具101を介してタイミングベルト710の所定箇所に固定されている。このため、搬送機構7は、搬送モーター71によりプーリー711を回転駆動させることで、ヘッドモジュールHMをキャリッジ100と共に、キャリッジガイド軸76に沿ってY軸方向に往復動させることができる。
具体的には、搬送機構7は、図1に示すように、キャリッジ100を往復動させるための駆動源となる搬送モーター71と、搬送モーター71を駆動するためのモータードライバー72と、記録用紙Pを搬送するための駆動源となる給紙モーター73と、給紙モーター73を駆動するためのモータードライバー74と、を具備する。また、搬送機構7は、図2に示すように、Y軸方向に延在するキャリッジガイド軸76と、搬送モーター71により回転駆動されるプーリー711と回転自在なプーリー712との間に掛け渡されY軸方向に延在するタイミングベルト710と、を具備する。キャリッジ100は、キャリッジガイド軸76によりY軸方向に往復自在に支持されるとともに、固定具101を介してタイミングベルト710の所定箇所に固定されている。このため、搬送機構7は、搬送モーター71によりプーリー711を回転駆動させることで、ヘッドモジュールHMをキャリッジ100と共に、キャリッジガイド軸76に沿ってY軸方向に往復動させることができる。
また、図2に示すように、搬送機構7は、キャリッジ100の下側(−Z方向)に設けられたプラテン75と、給紙モーター73の駆動に応じて回転し記録用紙Pを1枚ずつプラテン75上に供給するための給紙ローラ(図示省略)と、給紙モーター73の駆動に応じて回転しプラテン75上の記録用紙Pを排紙口へと搬送する排紙ローラ730と、を備える。このため、搬送機構7は、図2に示すように、記録用紙Pをプラテン75上において−X方向(上流側)から+X方向(下流側)へと搬送することができる。
本実施形態では、図2に例示するように、インクジェットプリンター1のキャリッジ100に、4個のインクカートリッジ31が格納されている。より具体的には、本実施形態では、シアン、マゼンタ、イエロー、及び、ブラックの、4色(CMYK)のインクと1対1に対応する4個のインクカートリッジ31が、キャリッジ100に格納されている場合を想定する。
また、本実施形態では、4個のインクカートリッジ31が、4個のヘッドユニットHUと、1対1に対応して設けられる場合を想定する。そして、各吐出部Dは、当該吐出部Dの属するヘッドユニットHUに対応するインクカートリッジ31からインクの供給を受ける。これにより、各吐出部Dは、供給されたインクを内部に充填し、充填したインクをノズルNから吐出することができる。つまり、ヘッドモジュールHMが具備する合計4M個の吐出部Dは、全体としてCMYKの4色のインクを吐出することができる。
なお、図2は一例に過ぎず、インクカートリッジ31は、キャリッジ100の外部に設けられるものであってもよい。
また、本実施形態では、4個のインクカートリッジ31が、4個のヘッドユニットHUと、1対1に対応して設けられる場合を想定する。そして、各吐出部Dは、当該吐出部Dの属するヘッドユニットHUに対応するインクカートリッジ31からインクの供給を受ける。これにより、各吐出部Dは、供給されたインクを内部に充填し、充填したインクをノズルNから吐出することができる。つまり、ヘッドモジュールHMが具備する合計4M個の吐出部Dは、全体としてCMYKの4色のインクを吐出することができる。
なお、図2は一例に過ぎず、インクカートリッジ31は、キャリッジ100の外部に設けられるものであってもよい。
ここで、印刷処理が実行される場合の制御部6の動作の概要を説明する。
印刷処理が実行される場合、制御部6は、まず、ホストコンピューターから供給される印刷データImgを、記憶部8に記憶させる。
次に、制御部6は、印刷処理において、記憶部8に記憶されている印刷データImg等の各種データに基づいて、印刷信号SI及び駆動波形信号Com等の各ヘッドユニットHUの動作を制御するための信号と、搬送機構7を制御するための信号と、を生成する。
そして、制御部6は、印刷処理において、印刷信号SI等の各種信号や、記憶部8に記憶されている各種データに基づいて、ヘッドモジュールHMに対する記録用紙Pの相対位置を変化させるように搬送機構7を制御しつつ、吐出部Dが駆動されるように駆動回路10を制御する。これにより、制御部6は、吐出部Dからのインクの吐出の有無、インクの吐出量、及び、インクの吐出タイミング等を調整し、印刷データImgに対応する画像を記録用紙P上に形成する印刷処理が実行されるように、インクジェットプリンター1の各部を制御する。
次に、制御部6は、印刷処理において、記憶部8に記憶されている印刷データImg等の各種データに基づいて、印刷信号SI及び駆動波形信号Com等の各ヘッドユニットHUの動作を制御するための信号と、搬送機構7を制御するための信号と、を生成する。
そして、制御部6は、印刷処理において、印刷信号SI等の各種信号や、記憶部8に記憶されている各種データに基づいて、ヘッドモジュールHMに対する記録用紙Pの相対位置を変化させるように搬送機構7を制御しつつ、吐出部Dが駆動されるように駆動回路10を制御する。これにより、制御部6は、吐出部Dからのインクの吐出の有無、インクの吐出量、及び、インクの吐出タイミング等を調整し、印刷データImgに対応する画像を記録用紙P上に形成する印刷処理が実行されるように、インクジェットプリンター1の各部を制御する。
また、本実施形態に係るインクジェットプリンター1は、各吐出部Dからのインクの吐出状態が正常であるか否か、すなわち、各吐出部Dにおいて吐出異常が生じていないか否かを判定するための処理である、吐出状態判定処理を実行する。
ここで、吐出異常とは、吐出部Dにおけるインクの吐出状態が異常となること、つまり、吐出部Dが具備するノズルNからインクを正確に吐出することのできない状態の総称である。より具体的には、吐出異常とは、駆動波形信号Comにより吐出部Dを駆動して吐出部Dからインクを吐出させようとしても、駆動波形信号Comが規定する態様によりインクを吐出できない状態である。ここで、駆動波形信号Comが規定するインクの吐出態様とは、吐出部Dが駆動波形信号Comの波形により規定される量のインクを吐出し、吐出部Dが駆動波形信号Comの波形により規定される吐出速度でインクを吐出することである。すなわち、駆動波形信号Comが規定するインクの吐出態様によりインクを吐出できない状態とは、吐出部Dからインクを吐出できない状態の他に、駆動波形信号Comにより規定されるインクの吐出量とは異なる量のインクが吐出部Dから吐出される状態、及び、駆動波形信号Comにより規定されるインクの吐出速度と異なる速度でインクが吐出されるために記録用紙P上の所望の着弾位置にインクを着弾させることができない状態、等を含む。
また、吐出状態判定処理とは、判定対象吐出部D-Hにおけるインクの吐出状態の判定(以下、単に「判定」と称する場合がある)と、当該判定を実行するための準備処理と、を含む一連の処理である。
ここで、吐出異常とは、吐出部Dにおけるインクの吐出状態が異常となること、つまり、吐出部Dが具備するノズルNからインクを正確に吐出することのできない状態の総称である。より具体的には、吐出異常とは、駆動波形信号Comにより吐出部Dを駆動して吐出部Dからインクを吐出させようとしても、駆動波形信号Comが規定する態様によりインクを吐出できない状態である。ここで、駆動波形信号Comが規定するインクの吐出態様とは、吐出部Dが駆動波形信号Comの波形により規定される量のインクを吐出し、吐出部Dが駆動波形信号Comの波形により規定される吐出速度でインクを吐出することである。すなわち、駆動波形信号Comが規定するインクの吐出態様によりインクを吐出できない状態とは、吐出部Dからインクを吐出できない状態の他に、駆動波形信号Comにより規定されるインクの吐出量とは異なる量のインクが吐出部Dから吐出される状態、及び、駆動波形信号Comにより規定されるインクの吐出速度と異なる速度でインクが吐出されるために記録用紙P上の所望の着弾位置にインクを着弾させることができない状態、等を含む。
また、吐出状態判定処理とは、判定対象吐出部D-Hにおけるインクの吐出状態の判定(以下、単に「判定」と称する場合がある)と、当該判定を実行するための準備処理と、を含む一連の処理である。
図3は、吐出状態判定処理が実行される場合におけるインクジェットプリンター1の動作の一例を示すフローチャートである。以下、図3を参照しつつ、吐出状態判定処理の概要を説明する。なお、以下では、吐出状態判定処理において、判定の対象とされる吐出部Dを、判定対象吐出部D-Hと称する。
図3に示すように、吐出状態判定処理が実行される場合、まず、インクジェットプリンター1の制御部6は、吐出部D[1]〜D[M]の中から判定対象吐出部D-Hを選択する(S100)。なお、この図では、吐出部D[m]が判定対象吐出部D-Hとして選択される場合を例示して説明する。
次に、インクジェットプリンター1の制御部6は、駆動回路10による判定対象吐出部D-Hの駆動の履歴を示す履歴情報HS[m]に基づいて、判定対象吐出部D-Hにおけるインクの吐出状態の判定において用いられる判定基準である閾値QL[m]及び閾値QH[m]を示す基準情報Q[m]を生成する(S110)。なお、制御部6は、ステップS110の処理を実行する場合に、基準情報生成部61として機能する。また、履歴情報HS[m]及び基準情報Q[m]の詳細は後述する。
次に、インクジェットプリンター1の制御部6は、判定対象吐出部D-Hが駆動されるように、駆動回路10の動作を制御する(S120)。
次に、インクジェットプリンター1の検出回路20は、判定対象吐出部D-Hが駆動された際に当該判定対象吐出部D-Hから検出される検出信号Vout[m]に基づいて、残留振動信号NSA[m]を生成する(S130)。
次に、インクジェットプリンター1の特性情報生成回路9は、残留振動信号NSA[m]の周期Tc[m]を示す周期情報Info-Tと、残留振動信号NSA[m]の振幅に関する振幅情報Info-Sと、を含む特性情報Infoを生成する(S140)。
次に、インクジェットプリンター1の制御部6は、特性情報Infoと基準情報Q[m]とに基づいて、判定対象吐出部D-Hにおけるインクの吐出状態を判定し、当該判定の結果を示す判定情報Stt[m]を生成し(S150)、吐出状態判定処理を終了させる。制御部6は、ステップS150の処理を実行する場合に、判定部62として機能する。なお、判定情報Stt[m]の詳細は後述する。
なお、インクジェットプリンター1は、吐出状態判定処理を実行することで、吐出異常の生じている吐出部Dの有無を検査し、印刷処理においてインクジェットプリンター1が正常に動作するか否かを検査することができる。
次に、インクジェットプリンター1の制御部6は、駆動回路10による判定対象吐出部D-Hの駆動の履歴を示す履歴情報HS[m]に基づいて、判定対象吐出部D-Hにおけるインクの吐出状態の判定において用いられる判定基準である閾値QL[m]及び閾値QH[m]を示す基準情報Q[m]を生成する(S110)。なお、制御部6は、ステップS110の処理を実行する場合に、基準情報生成部61として機能する。また、履歴情報HS[m]及び基準情報Q[m]の詳細は後述する。
次に、インクジェットプリンター1の制御部6は、判定対象吐出部D-Hが駆動されるように、駆動回路10の動作を制御する(S120)。
次に、インクジェットプリンター1の検出回路20は、判定対象吐出部D-Hが駆動された際に当該判定対象吐出部D-Hから検出される検出信号Vout[m]に基づいて、残留振動信号NSA[m]を生成する(S130)。
次に、インクジェットプリンター1の特性情報生成回路9は、残留振動信号NSA[m]の周期Tc[m]を示す周期情報Info-Tと、残留振動信号NSA[m]の振幅に関する振幅情報Info-Sと、を含む特性情報Infoを生成する(S140)。
次に、インクジェットプリンター1の制御部6は、特性情報Infoと基準情報Q[m]とに基づいて、判定対象吐出部D-Hにおけるインクの吐出状態を判定し、当該判定の結果を示す判定情報Stt[m]を生成し(S150)、吐出状態判定処理を終了させる。制御部6は、ステップS150の処理を実行する場合に、判定部62として機能する。なお、判定情報Stt[m]の詳細は後述する。
なお、インクジェットプリンター1は、吐出状態判定処理を実行することで、吐出異常の生じている吐出部Dの有無を検査し、印刷処理においてインクジェットプリンター1が正常に動作するか否かを検査することができる。
なお、本実施形態では、図1に示すように、特性情報生成回路9及び制御部6が、ヘッドユニットHUを制御するヘッドユニット制御回路90の一例である。
<<2.記録ヘッド及び吐出部の概要>>
図4及び図5を参照しつつ、記録ヘッドHDと、記録ヘッドHDに設けられる吐出部Dと、について説明する。
図4及び図5を参照しつつ、記録ヘッドHDと、記録ヘッドHDに設けられる吐出部Dと、について説明する。
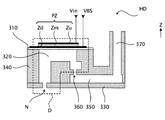
図4は、吐出部Dを含むように記録ヘッドHDを切断した、記録ヘッドHDの概略的な一部断面図である。
図4に示すように、吐出部Dは、圧電素子PZと、内部にインクが充填されたキャビティ320(「圧力室」の一例)と、キャビティ320に連通するノズルNと、振動板310と、を備える。吐出部Dは、圧電素子PZに駆動信号Vinが供給されて当該圧電素子PZが駆動信号Vinにより駆動されることにより、キャビティ320内のインクをノズルNから吐出させる。キャビティ320は、キャビティプレート340と、ノズルNが形成されたノズルプレート330と、振動板310と、により区画される空間である。キャビティ320は、インク供給口360を介してリザーバ350と連通している。リザーバ350は、インク取入口370を介して、当該吐出部Dに対応するインクカートリッジ31と連通している。
図4に示すように、吐出部Dは、圧電素子PZと、内部にインクが充填されたキャビティ320(「圧力室」の一例)と、キャビティ320に連通するノズルNと、振動板310と、を備える。吐出部Dは、圧電素子PZに駆動信号Vinが供給されて当該圧電素子PZが駆動信号Vinにより駆動されることにより、キャビティ320内のインクをノズルNから吐出させる。キャビティ320は、キャビティプレート340と、ノズルNが形成されたノズルプレート330と、振動板310と、により区画される空間である。キャビティ320は、インク供給口360を介してリザーバ350と連通している。リザーバ350は、インク取入口370を介して、当該吐出部Dに対応するインクカートリッジ31と連通している。
本実施形態では、圧電素子PZとして、図4に示すようなユニモルフ(モノモルフ)型を採用する。なお、圧電素子PZは、ユニモルフ型に限らず、バイモルフ型や積層型等を採用してもよい。
圧電素子PZは、上部電極Zuと、下部電極Zdと、上部電極Zu及び下部電極Zdの間に設けられた圧電体Zmと、を有する。下部電極Zdは、電位VBSに設定された給電線LHd(図6参照)と電気的に接続される。そして、上部電極Zuに駆動信号Vinが供給されて、上部電極Zu及び下部電極Zdの間に電圧が印加されると、当該印加された電圧に応じて圧電素子PZが+Z方向または−Z方向(以下、+Z方向及び−Z方向を「Z軸方向」と総称する)に変位し、その結果、圧電素子PZが振動する。
圧電素子PZは、上部電極Zuと、下部電極Zdと、上部電極Zu及び下部電極Zdの間に設けられた圧電体Zmと、を有する。下部電極Zdは、電位VBSに設定された給電線LHd(図6参照)と電気的に接続される。そして、上部電極Zuに駆動信号Vinが供給されて、上部電極Zu及び下部電極Zdの間に電圧が印加されると、当該印加された電圧に応じて圧電素子PZが+Z方向または−Z方向(以下、+Z方向及び−Z方向を「Z軸方向」と総称する)に変位し、その結果、圧電素子PZが振動する。
キャビティプレート340の上面開口部には、振動板310が設置される。振動板310には、下部電極Zdが接合されている。このため、圧電素子PZが駆動信号Vinにより駆動されて振動すると、振動板310も振動する。そして、振動板310の振動によりキャビティ320の容積(キャビティ320内の圧力)が変化し、キャビティ320内に充填されたインクがノズルNより吐出される。インクの吐出によりキャビティ320内のインクが減少した場合、リザーバ350からインクが供給される。また、リザーバ350へは、インクカートリッジ31からインク取入口370を介してインクが供給される。
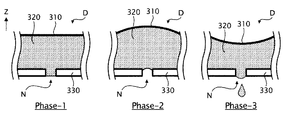
図5は、吐出部Dにおけるインクの吐出動作を説明するための説明図である。図5に示すように、制御部6は、例えば、Phase-1の状態において、吐出部Dが備える圧電素子PZに駆動信号Vinとして供給される駆動波形信号Comの電位を変化させることで、当該圧電素子PZが+Z方向に変位するような歪を発生させ、当該吐出部Dの振動板310を+Z方向に撓ませる。これにより、図5に示すPhase-2の状態のように、Phase-1の状態と比較して、当該吐出部Dのキャビティ320の容積が拡大する。次に、制御部6は、吐出部Dが備える圧電素子PZに駆動信号Vinとして供給される駆動波形信号Comの電位を変化させることで、当該圧電素子PZが−Z方向に変位するような歪を発生させ、当該吐出部Dの振動板310を−Z方向に撓ませる。これにより、図5に示すPhase-3の状態のように、キャビティ320の容積が急激に収縮し、キャビティ320を満たすインクの一部が、このキャビティ320に連通しているノズルNからインク滴として吐出される。
振動板310を含む吐出部Dには、圧電素子PZ及び振動板310が駆動信号Vinにより駆動されて図5に示すようにZ軸方向に変位した後に残留振動が生じる。
振動板310を含む吐出部Dには、圧電素子PZ及び振動板310が駆動信号Vinにより駆動されて図5に示すようにZ軸方向に変位した後に残留振動が生じる。
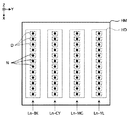
図6は、+Z方向または−Z方向からインクジェットプリンター1を平面視した場合の、ヘッドモジュールHMが具備する4個の記録ヘッドHDと、当該4個の記録ヘッドHDに設けられた合計4M個のノズルNの配置の一例を説明するための説明図である。
図6に示すように、ヘッドモジュールHMに設けられた各記録ヘッドHDには、ノズル列Lnが設けられる。ここで、ノズル列Lnとは、所定方向に列状に延在するように設けられた複数のノズルNである。本実施形態では、各ノズル列Lnが、M個のノズルNをX軸方向に列状に延在するように配置して構成される場合を想定する。
以下では、図6に示すように、ヘッドモジュールHMに設けられる4列のノズル列Lnを、ノズル列Ln-BK、Ln-CY、Ln-MG、Ln-YLと称する。ここで、ノズル列Ln-BKは、ブラックのインクを吐出する吐出部DのノズルNを配列したノズル列Lnであり、ノズル列Ln-CYは、シアンのインクを吐出する吐出部DのノズルNを配列したノズル列Lnであり、ノズル列Ln-MGは、マゼンタのインクを吐出する吐出部DのノズルNを配列したノズル列Lnであり、ノズル列Ln-YLは、イエローのインクを吐出する吐出部DのノズルNを配列したノズル列Lnである。
但し、図6に示すノズル列Lnは一例であり、各ノズル列Lnに属するM個のノズルNは、ノズル列Lnの延在する方向と交差する方向に所定の幅を有して配置されていてもよい。つまり、各ノズル列Lnにおいて、+X側から偶数番目のノズルNと奇数番目のノズルNのY軸方向の位置が相違するように、各ノズル列Lnに属するM個のノズルNが千鳥状に配置されてもよい。また、各ノズル列LnはX軸方向とは異なる方向に延在してもよい。また、本実施形態では、各記録ヘッドHDに設けられるノズル列Lnの列数が「1」である場合を例示しているが、各記録ヘッドHDには、2列以上のノズル列Lnが設けられてもよい。
図6に示すように、ヘッドモジュールHMに設けられた各記録ヘッドHDには、ノズル列Lnが設けられる。ここで、ノズル列Lnとは、所定方向に列状に延在するように設けられた複数のノズルNである。本実施形態では、各ノズル列Lnが、M個のノズルNをX軸方向に列状に延在するように配置して構成される場合を想定する。
以下では、図6に示すように、ヘッドモジュールHMに設けられる4列のノズル列Lnを、ノズル列Ln-BK、Ln-CY、Ln-MG、Ln-YLと称する。ここで、ノズル列Ln-BKは、ブラックのインクを吐出する吐出部DのノズルNを配列したノズル列Lnであり、ノズル列Ln-CYは、シアンのインクを吐出する吐出部DのノズルNを配列したノズル列Lnであり、ノズル列Ln-MGは、マゼンタのインクを吐出する吐出部DのノズルNを配列したノズル列Lnであり、ノズル列Ln-YLは、イエローのインクを吐出する吐出部DのノズルNを配列したノズル列Lnである。
但し、図6に示すノズル列Lnは一例であり、各ノズル列Lnに属するM個のノズルNは、ノズル列Lnの延在する方向と交差する方向に所定の幅を有して配置されていてもよい。つまり、各ノズル列Lnにおいて、+X側から偶数番目のノズルNと奇数番目のノズルNのY軸方向の位置が相違するように、各ノズル列Lnに属するM個のノズルNが千鳥状に配置されてもよい。また、各ノズル列LnはX軸方向とは異なる方向に延在してもよい。また、本実施形態では、各記録ヘッドHDに設けられるノズル列Lnの列数が「1」である場合を例示しているが、各記録ヘッドHDには、2列以上のノズル列Lnが設けられてもよい。
<<3.ヘッドユニットの構成>>
以下、図7を参照しつつ、各ヘッドユニットHUの構成について説明する。
以下、図7を参照しつつ、各ヘッドユニットHUの構成について説明する。
図7は、ヘッドユニットHUの構成の一例を示すブロック図である。上述のように、ヘッドユニットHUは、記録ヘッドHDと、駆動回路10と、検出回路20と、を備える。また、ヘッドユニットHUは、制御部6から駆動波形信号Com-Aが供給される内部配線LHaと、制御部6から駆動波形信号Com-Bが供給される内部配線LHbと、吐出部Dから検出される検出信号Voutを検出回路20に供給するための内部配線LHsと、を備える。
図7に示すように、駆動回路10は、M個のスイッチSWa(SWa[1]〜SWa[M])と、M個のスイッチSWb(SWb[1]〜SWb[M])と、M個のスイッチSWs(SWs[1]〜SWs[M])と、各スイッチの接続状態を指定する接続状態指定回路11と、を備える。なお、各スイッチとしては、例えば、トランスミッションゲートを採用することができる。
接続状態指定回路11は、制御部6から供給される印刷信号SI、ラッチ信号LAT、チェンジ信号CH、及び、期間指定信号Tsigの少なくとも一部の信号に基づいて、スイッチSWa[1]〜SWa[M]のオンオフを指定する接続状態指定信号SLa[1]〜SLa[M]と、スイッチSWb[1]〜SWb[M]のオンオフを指定する接続状態指定信号SLb[1]〜SLb[M]と、スイッチSWs[1]〜SWs[M]のオンオフを指定する接続状態指定信号SLs[1]〜SLs[M]と、を生成する。
スイッチSWa[m]は、接続状態指定信号SLa[m]に応じて、内部配線LHaと、吐出部D[m]に設けられた圧電素子PZ[m]の上部電極Zu[m]と、の導通及び非導通を切り替える。例えば、スイッチSWa[m]は、接続状態指定信号SLa[m]がハイレベルの場合にオンし、ローレベルの場合にオフする。
スイッチSWb[m]は、接続状態指定信号SLb[m]に応じて、内部配線LHbと、吐出部D[m]に設けられた圧電素子PZ[m]の上部電極Zu[m]との、導通及び非導通を切り替える。例えば、スイッチSWb[m]は、接続状態指定信号SLb[m]がハイレベルの場合にオンし、ローレベルの場合にオフする。
上述のとおり、駆動波形信号Com-A及びCom-Bのうち、スイッチSWa[m]またはSWb[m]を介して、吐出部D[m]の圧電素子PZ[m]に実際に供給される信号が駆動信号Vin[m]である。
スイッチSWs[m]は、接続状態指定信号SLs[m]に応じて、内部配線LHsと、吐出部D[m]に設けられた圧電素子PZ[m]の上部電極Zu[m]と、の導通及び非導通を切り替える。例えば、スイッチSWs[m]は、接続状態指定信号SLs[m]がハイレベルの場合にオンし、ローレベルの場合にオフする。
スイッチSWb[m]は、接続状態指定信号SLb[m]に応じて、内部配線LHbと、吐出部D[m]に設けられた圧電素子PZ[m]の上部電極Zu[m]との、導通及び非導通を切り替える。例えば、スイッチSWb[m]は、接続状態指定信号SLb[m]がハイレベルの場合にオンし、ローレベルの場合にオフする。
上述のとおり、駆動波形信号Com-A及びCom-Bのうち、スイッチSWa[m]またはSWb[m]を介して、吐出部D[m]の圧電素子PZ[m]に実際に供給される信号が駆動信号Vin[m]である。
スイッチSWs[m]は、接続状態指定信号SLs[m]に応じて、内部配線LHsと、吐出部D[m]に設けられた圧電素子PZ[m]の上部電極Zu[m]と、の導通及び非導通を切り替える。例えば、スイッチSWs[m]は、接続状態指定信号SLs[m]がハイレベルの場合にオンし、ローレベルの場合にオフする。
検出回路20には、判定対象吐出部D-Hとして駆動された吐出部D[m]の圧電素子PZ[m]から出力される検出信号Vout[m]が、内部配線LHsを介して供給される。そして、検出回路20は、当該検出信号Vout[m]に基づいて残留振動信号NSA[m]を生成する。
<<4.ヘッドユニットの動作>>
以下、図8〜図10を参照しつつ、各ヘッドユニットHUの動作について説明する。
以下、図8〜図10を参照しつつ、各ヘッドユニットHUの動作について説明する。
本実施形態において、インクジェットプリンター1の動作期間は、1または複数の単位期間Tuを含む。また、本実施形態に係るインクジェットプリンター1は、各単位期間Tuにおいて、印刷処理における各吐出部Dの駆動と、吐出状態判定処理における判定対象吐出部D-Hの駆動及び当該判定対象吐出部D-Hからの残留振動の検出と、の一方または双方を実行可能である。つまり、本実施形態では、印刷処理と吐出状態判定処理とを同一の単位期間Tuにおいて実行可能な場合を、一例として想定する。但し、本発明はこのような態様に限定されるものではなく、インクジェットプリンター1は、印刷処理が実行される単位期間Tuとは異なる単位期間Tuにおいて吐出状態判定処理を実行してもよい。
なお、一般的に、インクジェットプリンター1は、連続的または間欠的な複数の単位期間Tuにおいて印刷処理を実行することで、各吐出部Dから1または複数回ずつインクを吐出させて、印刷データImgの示す画像を形成する。また、本実施形態に係るインクジェットプリンター1は、連続的または間欠的に設けられたM個の単位期間Tuにおいて、M回の吐出状態判定処理を実行することで、M個の吐出部D[1]〜D[M]の各々を判定対象吐出部D-Hとした吐出状態判定処理を実行する。
なお、一般的に、インクジェットプリンター1は、連続的または間欠的な複数の単位期間Tuにおいて印刷処理を実行することで、各吐出部Dから1または複数回ずつインクを吐出させて、印刷データImgの示す画像を形成する。また、本実施形態に係るインクジェットプリンター1は、連続的または間欠的に設けられたM個の単位期間Tuにおいて、M回の吐出状態判定処理を実行することで、M個の吐出部D[1]〜D[M]の各々を判定対象吐出部D-Hとした吐出状態判定処理を実行する。
図8は、単位期間Tuにおけるインクジェットプリンター1の動作を示すためのタイミングチャートである。
この図に示すように、制御部6は、パルスPlsLを有するラッチ信号LATを出力する。これにより、制御部6は、パルスPlsLの立ち上がりから次のパルスPlsLの立ち上がりまでの期間として、単位期間Tuを規定する。
また、この図に示すように、制御部6は、パルスPlsCを有するチェンジ信号CHを出力する。これにより、制御部6は、単位期間Tuを、パルスPlsLの立ち上がりからパルスPlsCの立ち上がりまでの制御期間TuXと、パルスPlsCの立ち上がりからパルスPlsLの立ち上がりまでの制御期間TuYと、に区分する。
また、この図に示すように、制御部6は、パルスPlsT1及びパルスPlsT2を有する期間指定信号Tsigを出力する。これにより、制御部6は、パルスPlsLの立ち上がりからパルスPlsT1の立ち上がりまでの制御期間TSS1と、パルスPlsT1の立ち上がりからパルスPlsT2の立ち上がりまでの制御期間TSS2と、パルスPlsT2の立ち上がりからパルスPlsLの立ち上がりまでの制御期間TSS3と、に区分する。
この図に示すように、制御部6は、パルスPlsLを有するラッチ信号LATを出力する。これにより、制御部6は、パルスPlsLの立ち上がりから次のパルスPlsLの立ち上がりまでの期間として、単位期間Tuを規定する。
また、この図に示すように、制御部6は、パルスPlsCを有するチェンジ信号CHを出力する。これにより、制御部6は、単位期間Tuを、パルスPlsLの立ち上がりからパルスPlsCの立ち上がりまでの制御期間TuXと、パルスPlsCの立ち上がりからパルスPlsLの立ち上がりまでの制御期間TuYと、に区分する。
また、この図に示すように、制御部6は、パルスPlsT1及びパルスPlsT2を有する期間指定信号Tsigを出力する。これにより、制御部6は、パルスPlsLの立ち上がりからパルスPlsT1の立ち上がりまでの制御期間TSS1と、パルスPlsT1の立ち上がりからパルスPlsT2の立ち上がりまでの制御期間TSS2と、パルスPlsT2の立ち上がりからパルスPlsLの立ち上がりまでの制御期間TSS3と、に区分する。
本実施形態に係る印刷信号SIは、各単位期間Tuにおける吐出部D[1]〜D[M]の駆動の態様を指定する個別指定信号Sd[1]〜Sd[M]を含む。そして、制御部6は、単位期間Tuにおいて印刷処理及び吐出状態判定処理の少なくとも一方が実行される場合、図8に示すように、当該単位期間Tuに先立って、個別指定信号Sd[1]〜Sd[M]を含む印刷信号SIを、クロック信号CLに同期させて接続状態指定回路11に供給する。そして、接続状態指定回路11は、当該単位期間Tuにおいて、個別指定信号Sd[m]に基づいて、接続状態指定信号SLa[m]、SLb[m]、SLs[m]を生成する。
本実施形態に係る個別指定信号Sd[m]は、単位期間Tuにおいて、吐出部D[m]に対して、大ドットに相当する量(大程度の量)のインクが吐出される態様での駆動(「大ドットの形成」と称する場合がある)と、中ドットに相当する量(中程度の量)のインクが吐出される態様での駆動(「中ドットの形成」と称する場合がある)と、小ドットに相当する量(小程度の量)のインクが吐出される態様での駆動(「小ドットの形成」と称する場合がある)と、インクが吐出されない態様での駆動(「インクの非吐出」と称する場合がある)と、吐出状態判定処理における判定の対象としての駆動(「判定対象吐出部D-Hとしての駆動」と称する場合がある)と、の5つの駆動態様のうち、何れか1つの駆動態様を指定する。
なお、本実施形態では、個別指定信号Sd[m]が3ビットのデジタル信号である場合を想定する(図10及び図11参照)。また、単位期間Tuにおいて、吐出部D[m]が判定対象吐出部D-Hとして指定される場合、当該吐出部D[m]に対応して設けられるスイッチSWa[m]、SWb[m]、SWs[m]を、それぞれ、スイッチSWa-H、SWb-H、SWs-Hと称する場合がある。
なお、本実施形態では、個別指定信号Sd[m]が3ビットのデジタル信号である場合を想定する(図10及び図11参照)。また、単位期間Tuにおいて、吐出部D[m]が判定対象吐出部D-Hとして指定される場合、当該吐出部D[m]に対応して設けられるスイッチSWa[m]、SWb[m]、SWs[m]を、それぞれ、スイッチSWa-H、SWb-H、SWs-Hと称する場合がある。
図8に示すように、制御部6は、制御期間TuXに設けられた波形PXと、制御期間TuYに設けられた波形PYと、を有する駆動波形信号Com-Aを出力する。本実施形態では、波形PXの最高電位VHxと最低電位VLxとの電位差が、波形PYの最高電位VHyと最低電位VLyとの電位差よりも大きくなるように、波形PX及び波形PYを定める。具体的には、波形PXを有する駆動波形信号Com-Aが駆動信号Vin[m]として吐出部D[m]に供給される場合、吐出部D[m]から中程度の量のインクが吐出されるように、波形PXの波形を定める。また、波形PYを有する駆動波形信号Com-Aが駆動信号Vin[m]として吐出部D[m]に供給される場合、吐出部D[m]から小程度の量のインクが吐出されるように、波形PYの波形を定める。なお、波形PX及び波形PYは、開始時及び終了時の電位が基準電位V0に設定されている。
接続状態指定回路11は、単位期間Tuにおいて、個別指定信号Sd[m]が吐出部D[m]に対して大ドットの形成を指定する場合、接続状態指定信号SLa[m]を当該単位期間Tuに亘りハイレベルに設定し、接続状態指定信号SLb[m]及びSLs[m]を当該単位期間Tuに亘りローレベルに設定する(図10参照)。この場合、吐出部D[m]は、制御期間TuXにおいて波形PXの駆動波形信号Com-Aにより駆動されて中程度の量のインクを吐出し、制御期間TuYにおいて波形PYの駆動波形信号Com-Aにより駆動されて小程度の量のインクを吐出する。これにより、吐出部D[m]は、単位期間Tuにおいて、合計で大程度の量のインクを吐出し、記録用紙Pには大ドットが形成される。
接続状態指定回路11は、単位期間Tuにおいて、個別指定信号Sd[m]が吐出部D[m]に対して中ドットの形成を指定する場合、接続状態指定信号SLa[m]を制御期間TuXにおいてハイレベルに制御期間TuYにおいてローレベルにそれぞれ設定し、接続状態指定信号SLb[m]及びSLs[m]を当該単位期間Tuに亘りローレベルに設定する(図10参照)。この場合、吐出部D[m]は、制御期間TuXにおいて波形PXの駆動波形信号Com-Aにより駆動されて中程度の量のインクを吐出し、記録用紙Pには中ドットが形成される。
接続状態指定回路11は、単位期間Tuにおいて、個別指定信号Sd[m]が吐出部D[m]に対して小ドットの形成を指定する場合、接続状態指定信号SLa[m]を制御期間TuXにおいてローレベルに制御期間TuYにおいてハイレベルにそれぞれ設定し、接続状態指定信号SLb[m]及びSLs[m]を当該単位期間Tuに亘りローレベルに設定する(図10参照)。この場合、吐出部D[m]は、制御期間TuYにおいて波形PYの駆動波形信号Com-Aにより駆動されて小程度の量のインクを吐出し、記録用紙Pには小ドットが形成される。
接続状態指定回路11は、単位期間Tuにおいて、個別指定信号Sd[m]が吐出部D[m]に対してインクの非吐出を指定する場合、接続状態指定信号SLa[m]、SLb[m]、SLs[m]を当該単位期間Tuに亘りローレベルに設定する(図10参照)。この場合、吐出部D[m]は、当該単位期間Tuにおいて駆動波形信号Comにより駆動されず、インクを吐出しない。
接続状態指定回路11は、単位期間Tuにおいて、個別指定信号Sd[m]が吐出部D[m]に対して中ドットの形成を指定する場合、接続状態指定信号SLa[m]を制御期間TuXにおいてハイレベルに制御期間TuYにおいてローレベルにそれぞれ設定し、接続状態指定信号SLb[m]及びSLs[m]を当該単位期間Tuに亘りローレベルに設定する(図10参照)。この場合、吐出部D[m]は、制御期間TuXにおいて波形PXの駆動波形信号Com-Aにより駆動されて中程度の量のインクを吐出し、記録用紙Pには中ドットが形成される。
接続状態指定回路11は、単位期間Tuにおいて、個別指定信号Sd[m]が吐出部D[m]に対して小ドットの形成を指定する場合、接続状態指定信号SLa[m]を制御期間TuXにおいてローレベルに制御期間TuYにおいてハイレベルにそれぞれ設定し、接続状態指定信号SLb[m]及びSLs[m]を当該単位期間Tuに亘りローレベルに設定する(図10参照)。この場合、吐出部D[m]は、制御期間TuYにおいて波形PYの駆動波形信号Com-Aにより駆動されて小程度の量のインクを吐出し、記録用紙Pには小ドットが形成される。
接続状態指定回路11は、単位期間Tuにおいて、個別指定信号Sd[m]が吐出部D[m]に対してインクの非吐出を指定する場合、接続状態指定信号SLa[m]、SLb[m]、SLs[m]を当該単位期間Tuに亘りローレベルに設定する(図10参照)。この場合、吐出部D[m]は、当該単位期間Tuにおいて駆動波形信号Comにより駆動されず、インクを吐出しない。
図8に示すように、制御部6は、単位期間Tuに設けられた波形PSを有する駆動波形信号Com-Bを出力する。本実施形態では、波形PSの最高電位VHsと最低電位VLsとの電位差が、波形PYの最高電位VHyと最低電位VLyとの電位差よりも小さくなるように、波形PSを定める。具体的には、波形PSを有する駆動波形信号Com-Bを吐出部D[m]に供給する場合、吐出部D[m]からインクが吐出されない程度に吐出部D[m]が駆動されるように、波形PSの波形を定める。なお、波形PSは、開始時及び終了時の電位が基準電位V0に設定されている。
接続状態指定回路11は、単位期間Tuにおいて、個別指定信号Sd[m]が吐出部D[m]を判定対象吐出部D-Hとしての駆動を指定する場合、接続状態指定信号SLa[m]を当該単位期間Tuに亘りローレベルに設定し、接続状態指定信号SLb[m]を制御期間TSS1及びTSS3においてハイレベルに制御期間TSS2においてローレベルにそれぞれ設定し、接続状態指定信号SLs[m]を制御期間TSS2においてハイレベルに制御期間TSS1及びTSS3においてローレベルにそれぞれ設定する(図10参照)。
この場合、判定対象吐出部D-Hは、制御期間TSS1において波形PSの駆動波形信号Com-Bにより駆動される。具体的には、判定対象吐出部D-Hが有する圧電素子PZは、制御期間TSS1において波形PSの駆動波形信号Com-Bにより変位させられる。その結果、判定対象吐出部D-Hにおいて振動が生じ、この振動は、制御期間TSS2においても残留する。そして、制御期間TSS2において、判定対象吐出部D-Hの圧電素子PZが有する上部電極Zuは、判定対象吐出部D-Hにおいて生じている残留振動に応じて電位を変化する。換言すれば、制御期間TSS2において、判定対象吐出部D-Hの圧電素子PZが有する上部電極Zuは、判定対象吐出部D-Hにおいて生じている残留振動に従った圧電素子PZの起電力に応じた電位を示す。そして、駆動回路10は、制御期間TSS2において、当該上部電極Zuの電位を、検出回路20に対して内部配線LHsを介して検出信号Voutとして供給する。
この場合、判定対象吐出部D-Hは、制御期間TSS1において波形PSの駆動波形信号Com-Bにより駆動される。具体的には、判定対象吐出部D-Hが有する圧電素子PZは、制御期間TSS1において波形PSの駆動波形信号Com-Bにより変位させられる。その結果、判定対象吐出部D-Hにおいて振動が生じ、この振動は、制御期間TSS2においても残留する。そして、制御期間TSS2において、判定対象吐出部D-Hの圧電素子PZが有する上部電極Zuは、判定対象吐出部D-Hにおいて生じている残留振動に応じて電位を変化する。換言すれば、制御期間TSS2において、判定対象吐出部D-Hの圧電素子PZが有する上部電極Zuは、判定対象吐出部D-Hにおいて生じている残留振動に従った圧電素子PZの起電力に応じた電位を示す。そして、駆動回路10は、制御期間TSS2において、当該上部電極Zuの電位を、検出回路20に対して内部配線LHsを介して検出信号Voutとして供給する。
ところで、上述のとおり、本実施形態では、単位期間Tuにおいて、印刷処理と吐出状態判定処理とが同時に実行される場合がある。この場合、印刷データImgに基づく画像を形成するために吐出部D[m]からインクの吐出が必要な場合に、当該吐出部D[m]が判定対象吐出部D-Hとして選択されると、印刷データImgに基づく画像の形成に必要となるドットが形成されなくなり、画質が低下する。このため、本実施形態に係る制御部6は、印刷処理においてインクを吐出する必要のない吐出部Dの中から、判定対象吐出部D-Hを選択する。
図9は、本実施形態に係る接続状態指定回路11の構成の一例を示す図である。図9に示すように、接続状態指定回路11は、接続状態指定信号SLa[1]〜SLa[M]、SLb[1]〜SLb[M]、及び、SLs[1]〜SLs[M]を生成する。
具体的には、接続状態指定回路11は、吐出部D[1]〜D[M]と1対1に対応するように、転送回路SR[1]〜SR[M]と、ラッチ回路LT[1]〜LT[M]と、デコーダーDC[1]〜DC[M]と、を有する。このうち、転送回路SR[m]には、個別指定信号Sd[m]が供給される。なお、この図では、個別指定信号Sd[1]〜Sd[M]がシリアルで供給され、例えば、m段に対応する個別指定信号Sd[m]が、転送回路SR[1]から転送回路SR[m]へと、クロック信号CLに同期して順番に転送される場合を例示している。また、ラッチ回路LT[m]は、ラッチ信号LATのパルスPlsLがハイレベルに立ち上がるタイミングにおいて、転送回路SR[m]に供給された個別指定信号Sd[m]をラッチする。また、デコーダーDC[m]は、個別指定信号Sd[m]、ラッチ信号LAT、チェンジ信号CH、及び、期間指定信号Tsigの少なくとも一部に基づいて、接続状態指定信号SLa[m]、SLb[m]、SLs[m]を生成する。
具体的には、接続状態指定回路11は、吐出部D[1]〜D[M]と1対1に対応するように、転送回路SR[1]〜SR[M]と、ラッチ回路LT[1]〜LT[M]と、デコーダーDC[1]〜DC[M]と、を有する。このうち、転送回路SR[m]には、個別指定信号Sd[m]が供給される。なお、この図では、個別指定信号Sd[1]〜Sd[M]がシリアルで供給され、例えば、m段に対応する個別指定信号Sd[m]が、転送回路SR[1]から転送回路SR[m]へと、クロック信号CLに同期して順番に転送される場合を例示している。また、ラッチ回路LT[m]は、ラッチ信号LATのパルスPlsLがハイレベルに立ち上がるタイミングにおいて、転送回路SR[m]に供給された個別指定信号Sd[m]をラッチする。また、デコーダーDC[m]は、個別指定信号Sd[m]、ラッチ信号LAT、チェンジ信号CH、及び、期間指定信号Tsigの少なくとも一部に基づいて、接続状態指定信号SLa[m]、SLb[m]、SLs[m]を生成する。
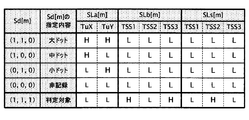
図10は、デコーダーDC[m]における接続状態指定信号SLa[m]、SLb[m]、SLs[m]の生成(デコード内容)を説明するための説明図である。デコーダーDC[m]は、図10に従って、個別指定信号Sd[m]をデコードし、接続状態指定信号SLa[m]、SLb[m]、SLs[m]を生成する。
図10に示すように、本実施形態に係る個別指定信号Sd[m]は、大ドットの形成を指定する値(1,1,0)、中ドットの形成を指定する値(1,0,0)、小ドットの形成を指定する値(0,1,0)、インクの非吐出を指定する値(0,0,0)、または、判定対象吐出部D-Hとしての駆動を指定する値(1,1,1)、の5値のうちの何れかの値を示す。そして、デコーダーDC[m]は、個別指定信号Sd[m]が(1,1,0)を示す場合、単位期間Tuに亘り接続状態指定信号SLa[m]をハイレベルとし、個別指定信号Sd[m]が(1,0,0)を示す場合、制御期間TuXにおいて接続状態指定信号SLa[m]をハイレベルとし、個別指定信号Sd[m]が(0,1,0)を示す場合、制御期間TuYにおいて接続状態指定信号SLa[m]をハイレベルとし、個別指定信号Sd[m]が(1,1,1)を示す場合、制御期間TSS1及びTSS3において接続状態指定信号SLb[m]をハイレベルとし、制御期間TSS2において接続状態指定信号SLs[m]をハイレベルとし、以上に該当しない場合において各信号をローレベルとする。
図10に示すように、本実施形態に係る個別指定信号Sd[m]は、大ドットの形成を指定する値(1,1,0)、中ドットの形成を指定する値(1,0,0)、小ドットの形成を指定する値(0,1,0)、インクの非吐出を指定する値(0,0,0)、または、判定対象吐出部D-Hとしての駆動を指定する値(1,1,1)、の5値のうちの何れかの値を示す。そして、デコーダーDC[m]は、個別指定信号Sd[m]が(1,1,0)を示す場合、単位期間Tuに亘り接続状態指定信号SLa[m]をハイレベルとし、個別指定信号Sd[m]が(1,0,0)を示す場合、制御期間TuXにおいて接続状態指定信号SLa[m]をハイレベルとし、個別指定信号Sd[m]が(0,1,0)を示す場合、制御期間TuYにおいて接続状態指定信号SLa[m]をハイレベルとし、個別指定信号Sd[m]が(1,1,1)を示す場合、制御期間TSS1及びTSS3において接続状態指定信号SLb[m]をハイレベルとし、制御期間TSS2において接続状態指定信号SLs[m]をハイレベルとし、以上に該当しない場合において各信号をローレベルとする。
検出回路20は、上述のとおり、検出信号Voutに基づいて残留振動信号NSAを生成する。残留振動信号NSAとは、検出信号Voutの振幅を増幅し、また、検出信号Voutからノイズ成分を除去する等することで、検出信号Voutを特性情報生成回路9における処理に適した波形に整形した信号である。
検出回路20は、例えば、検出信号Voutを増幅させるための負帰還型のアンプと、検出信号Voutの高域周波数成分を減衰させるためのローパスフィルターと、インピーダンスを変換してローインピーダンスの残留振動信号NSAを出力するボルテージフォロアと、を含む構成等であってもよい。
検出回路20は、例えば、検出信号Voutを増幅させるための負帰還型のアンプと、検出信号Voutの高域周波数成分を減衰させるためのローパスフィルターと、インピーダンスを変換してローインピーダンスの残留振動信号NSAを出力するボルテージフォロアと、を含む構成等であってもよい。
<<5.特性情報生成回路>>
次に、特性情報生成回路9について説明する。
次に、特性情報生成回路9について説明する。
図11は、特性情報生成回路9における、周期情報Info-T及び振幅情報Info-Sの生成を説明するための説明図である。
この図に示すように、特性情報生成回路9は、残留振動信号NSAの電位と、残留振動信号NSAの振幅中心レベルの電位Vth-Cと、の比較結果に基づいて、残留振動信号NSAの周期Tcを測定し、当該周期Tcを示す周期情報Info-Tを生成する。
また、特性情報生成回路9は、周期Tcを計測している期間において、残留振動信号NSAの電位が、電位Vth-Cよりも高電位の電位Vth-H以上となり、且つ、電位Vth-Cよりも低電位の電位Vth-L以下となる場合において、振幅情報Info-Sの値を、残留振動信号NSAが所定の振幅を有していることを示す値「1」に設定し、それ以外の場合に、振幅情報Info-Sの値を、残留振動信号NSAが所定の振幅を有していないことを示す値「0」に設定する。
そして、特性情報生成回路9は、周期情報Info-Tと振幅情報Info-Sとを含む特性情報Infoを出力する。
この図に示すように、特性情報生成回路9は、残留振動信号NSAの電位と、残留振動信号NSAの振幅中心レベルの電位Vth-Cと、の比較結果に基づいて、残留振動信号NSAの周期Tcを測定し、当該周期Tcを示す周期情報Info-Tを生成する。
また、特性情報生成回路9は、周期Tcを計測している期間において、残留振動信号NSAの電位が、電位Vth-Cよりも高電位の電位Vth-H以上となり、且つ、電位Vth-Cよりも低電位の電位Vth-L以下となる場合において、振幅情報Info-Sの値を、残留振動信号NSAが所定の振幅を有していることを示す値「1」に設定し、それ以外の場合に、振幅情報Info-Sの値を、残留振動信号NSAが所定の振幅を有していないことを示す値「0」に設定する。
そして、特性情報生成回路9は、周期情報Info-Tと振幅情報Info-Sとを含む特性情報Infoを出力する。
<<6.判定部及び基準情報生成部>>
次に、吐出部Dに生じる残留振動について説明した上で、図12乃至図14を参照しつつ、残留振動に基づいて吐出部Dにおけるインクの吐出状態の判定を行う判定部62と、当該判定において用いられる判定基準を示す基準情報Qを生成する基準情報生成部61と、について説明する。
次に、吐出部Dに生じる残留振動について説明した上で、図12乃至図14を参照しつつ、残留振動に基づいて吐出部Dにおけるインクの吐出状態の判定を行う判定部62と、当該判定において用いられる判定基準を示す基準情報Qを生成する基準情報生成部61と、について説明する。
一般的に、吐出部Dに生じる残留振動は、ノズルNの形状、キャビティ320に充填されたインクの重量、及び、キャビティ320に充填されたインクの粘度、等により決定される固有振動周波数を有する。
例えば、一般的に、吐出部Dのキャビティ320に気泡が混入しているために吐出異常が生じている場合には、吐出状態が正常な場合と比較して、当該吐出部Dに生じる残留振動の周期が短くなる。また、一般的に、吐出部DのノズルN付近に紙粉等の異物が付着しているために吐出異常が生じている場合には、吐出状態が正常な場合と比較して、当該吐出部Dに生じる残留振動の周期が長くなり、且つ、当該吐出部Dに生じる残留振動の振幅が小さくなる。また、一般的に、吐出部Dのキャビティ320に充填されたインクが増粘しているために吐出異常が生じている場合には、吐出状態が正常な場合と比較して、当該吐出部Dに生じる残留振動の周期が長くなり、且つ、当該吐出部Dに生じる残留振動の振幅が小さくなる。
例えば、一般的に、吐出部Dのキャビティ320に気泡が混入しているために吐出異常が生じている場合には、吐出状態が正常な場合と比較して、当該吐出部Dに生じる残留振動の周期が短くなる。また、一般的に、吐出部DのノズルN付近に紙粉等の異物が付着しているために吐出異常が生じている場合には、吐出状態が正常な場合と比較して、当該吐出部Dに生じる残留振動の周期が長くなり、且つ、当該吐出部Dに生じる残留振動の振幅が小さくなる。また、一般的に、吐出部Dのキャビティ320に充填されたインクが増粘しているために吐出異常が生じている場合には、吐出状態が正常な場合と比較して、当該吐出部Dに生じる残留振動の周期が長くなり、且つ、当該吐出部Dに生じる残留振動の振幅が小さくなる。
このように、吐出部Dにおけるインクの吐出状態に応じて、当該吐出部Dに生じる残留振動の周期または振幅が変動する。このため、吐出部Dに生じる残留振動の周期及び振幅に基づいて、当該吐出部Dにおけるインクの吐出状態を判定することができる。
上述のとおり、残留振動信号NSAは、判定対象吐出部D-Hにおいて生じている残留振動に応じた波形を示す。具体的には、残留振動信号NSAは、判定対象吐出部D-Hにおいて生じている残留振動の周期に応じた周期Tcを示し、判定対象吐出部D-Hにおいて生じている残留振動の振幅に応じた振幅を示す。このため、判定部62は、残留振動信号NSAの周期Tc及び振幅に基づいて、判定対象吐出部D-Hにおけるインクの吐出状態を判定することができる。なお、以下では、判定対象吐出部D-Hに生じる残留振動の周期と、判定対象吐出部D-Hに生じる残留振動を示す検出信号Voutに基づいて生成される残留振動信号NSAの周期とを、単に、残留振動の周期Tcと称する場合がある。
図12は、判定部62における、判定情報Sttの生成を説明するための説明図である。
この図に示すように、判定部62は、振幅情報Info-Sが「1」である場合には、周期情報Info-Tの示す周期Tcと、基準情報Qの示す閾値QL及び閾値QHのうち少なくとも一方と、を比較することで、判定対象吐出部D-Hにおけるインクの吐出状態を判定し、当該判定の結果を示す判定情報Sttを生成する。
ここで、閾値QLは、判定対象吐出部D-Hの吐出状態が正常である場合における残留振動の周期Tcと、判定対象吐出部D-Hのキャビティ320に気泡が混入した場合における残留振動の周期Tcと、の境界を示すための値である。また、閾値QHは、閾値QLよりも大きい値であって、判定対象吐出部D-Hの吐出状態が正常である場合における残留振動の周期Tcと、判定対象吐出部D-HのノズルN付近に異物が付着した場合における残留振動の周期Tcと、の境界を示すための値である。なお、上述のとおり、本実施形態において、閾値QL及び閾値QHは、履歴情報HSに基づいて吐出部D毎に定められる。
この図に示すように、判定部62は、振幅情報Info-Sが「1」である場合には、周期情報Info-Tの示す周期Tcと、基準情報Qの示す閾値QL及び閾値QHのうち少なくとも一方と、を比較することで、判定対象吐出部D-Hにおけるインクの吐出状態を判定し、当該判定の結果を示す判定情報Sttを生成する。
ここで、閾値QLは、判定対象吐出部D-Hの吐出状態が正常である場合における残留振動の周期Tcと、判定対象吐出部D-Hのキャビティ320に気泡が混入した場合における残留振動の周期Tcと、の境界を示すための値である。また、閾値QHは、閾値QLよりも大きい値であって、判定対象吐出部D-Hの吐出状態が正常である場合における残留振動の周期Tcと、判定対象吐出部D-HのノズルN付近に異物が付着した場合における残留振動の周期Tcと、の境界を示すための値である。なお、上述のとおり、本実施形態において、閾値QL及び閾値QHは、履歴情報HSに基づいて吐出部D毎に定められる。
本実施形態では、図12に示すように、振幅情報Info-Sの値が「1」であり、且つ、周期情報Info-Tの示す周期Tcが「QL≦Tc≦QH」を満たす場合には、判定対象吐出部D-Hにおけるインクの吐出状態が正常であると看做す。そして、この場合、判定部62は、判定情報Sttに対して、判定対象吐出部D-Hにおけるインクの吐出状態が正常であることを示す値、例えば「1」を設定する。
また、振幅情報Info-Sの値が「1」であり、且つ、周期情報Info-Tの示す周期Tcが「Tc<QL」を満たす場合には、判定対象吐出部D-Hにおいて気泡による吐出異常が生じていると看做す。そして、この場合、判定部62は、判定情報Sttに対して、判定対象吐出部D-Hにおいて気泡による吐出異常が生じていることを示す値、例えば「2」を設定する。
また、振幅情報Info-Sの値が「1」であり、且つ、周期情報Info-Tの示す周期Tcが「QH<Tc」を満たす場合には、判定対象吐出部D-Hにおいて異物付着またはインク増粘による吐出異常が生じていると看做す。そして、この場合、判定部62は、判定情報Sttに対して、判定対象吐出部D-Hにおいて異物付着またはインク増粘による吐出異常が生じていることを示す値、例えば「3」を設定する。
また、振幅情報Info-Sの値が「0」である場合には、判定対象吐出部D-Hにおいて異物付着またはインク増粘等に起因する吐出異常が生じていると看做す。そして、この場合、判定部62は、判定情報Sttに対して、判定対象吐出部D-Hにおいて異物付着またはインク増粘による吐出異常が生じていることを示す値、例えば「3」を設定する。
以上のように、判定部62は、周期情報Info-Tと振幅情報Info-Sと基準情報Qとに基づいて、判定情報Sttを生成する。
また、振幅情報Info-Sの値が「1」であり、且つ、周期情報Info-Tの示す周期Tcが「Tc<QL」を満たす場合には、判定対象吐出部D-Hにおいて気泡による吐出異常が生じていると看做す。そして、この場合、判定部62は、判定情報Sttに対して、判定対象吐出部D-Hにおいて気泡による吐出異常が生じていることを示す値、例えば「2」を設定する。
また、振幅情報Info-Sの値が「1」であり、且つ、周期情報Info-Tの示す周期Tcが「QH<Tc」を満たす場合には、判定対象吐出部D-Hにおいて異物付着またはインク増粘による吐出異常が生じていると看做す。そして、この場合、判定部62は、判定情報Sttに対して、判定対象吐出部D-Hにおいて異物付着またはインク増粘による吐出異常が生じていることを示す値、例えば「3」を設定する。
また、振幅情報Info-Sの値が「0」である場合には、判定対象吐出部D-Hにおいて異物付着またはインク増粘等に起因する吐出異常が生じていると看做す。そして、この場合、判定部62は、判定情報Sttに対して、判定対象吐出部D-Hにおいて異物付着またはインク増粘による吐出異常が生じていることを示す値、例えば「3」を設定する。
以上のように、判定部62は、周期情報Info-Tと振幅情報Info-Sと基準情報Qとに基づいて、判定情報Sttを生成する。
一般的に、インクを吐出する頻度が低い吐出部Dのキャビティ320に充填されたインクは、インクを吐出する頻度が高い吐出部Dのキャビティ320に充填されたインクと比較して、増粘する可能性が高い。但し、吐出部Dのキャビティ320に充填されたインクが増粘している場合であっても、増粘の程度が軽微な場合には、当該吐出部Dからインクを正常に吐出できる可能性が高い。そして、吐出部Dのキャビティ320に充填されたインクにおいて軽微な増粘が生じている場合の当該吐出部Dに生じる残留振動の特性と、吐出部DのノズルN付近に異物が付着して吐出状態が異常となった吐出部Dに生じる残留振動の特性と、が類似する場合がある。よって、仮に、閾値QL及び閾値QHを、駆動信号Vinによる判定対象吐出部D-Hの駆動の履歴を考慮せずに定める場合には、吐出部Dにおいて吐出異常に至らない程度の軽微な増粘が生じているのにも関わらず、吐出部Dにおいて異物の付着による吐出異常が生じていると誤判定する可能性が存在する。
そこで、本実施形態では、基準情報生成部61において、駆動回路10による吐出部D[m]の駆動の履歴を示す履歴情報HS[m]に基づいて、吐出部D[m]におけるインクの吐出の頻度を示す頻度情報F[m]を生成し、そして、頻度情報F[m]に基づいて、閾値QL[m]及び閾値QH[m]を示す基準情報Q[m]を生成する。
図13は、履歴情報HS[m]、頻度情報F[m]、及び、基準情報Q[m]を説明するための説明図である。
本実施形態において、履歴情報HS[m]とは、吐出部D[m]の判定前期間(「所定期間」の一例)における、吐出部D[m]からのインクの吐出の履歴を示す情報である。ここで、吐出部D[m]の判定前期間とは、吐出部D[m]を対象とする吐出状態の判定のために、吐出部D[m]が判定対象吐出部D-Hとして駆動される単位期間Tu(以下、「判定単位期間Tu-H[m]」と称する)よりも前の期間である。本実施形態では、一例として、図13に示すように、判定単位期間Tu-H[m]のK個前の単位期間Tuである判定前単位期間Tu[m,-K]から、判定単位期間Tu-H[m]の1つ前の単位期間Tuである判定前単位期間Tu[m,-1]までの、K個の単位期間Tuを、吐出部D[m]の判定前期間とする(Kは、1≦Kを満たす自然数)。ここで、判定前単位期間Tu[m,-k]とは、判定単位期間Tu-H[m]よりもk個前の単位期間Tuのことである(変数kは、1≦k≦Kを満たす自然数)。
なお、図13では、履歴情報HS[m]は、判定前単位期間Tu[m,-k]において吐出部D[m]がインクを吐出する場合に「1」を示し、判定前単位期間Tu[m,-k]において吐出部D[m]がインクを吐出しない場合に「0」を示す。つまり、履歴情報HS[m]が「1」を示す場合とは、判定前単位期間Tu[m,-k]における吐出部D[m]の駆動を指定する個別指定信号Sd[m]が、大ドットの形成を指定する値(1,1,0)、中ドットの形成を指定する値(1,0,0)、または、小ドットの形成を指定する値(0,1,0)の何れかとなる場合である。
また、本実施形態において、頻度情報F[m]とは、判定前期間おいて吐出部D[m]がインクを吐出する頻度(吐出頻度)を示す情報である。より具体的には、本実施形態では、判定前期間に含まれる複数の単位期間Tuに対する、吐出部D[m]がインクを吐出するように駆動される単位期間Tuの割合を、頻度情報F[m]の示す吐出頻度として規定する。つまり、本実施形態に係る基準情報生成部61は、履歴情報HS[m]が有するK個の値のうち「1」の個数を「K」で除算した値を、頻度情報F[m]の示す吐出頻度として算出する。
また、本実施形態において、基準情報Q[m]とは、閾値QH[m]及び閾値QL[m]を示す情報である。本実施形態では、図13に示すように、閾値QL[m]が、値qL1、または、値qL1よりも大きい値qL2のうち何れか一方の値をとり、閾値QH[m]が、値qH1、または、値qH1よりも大きい値qH2のうち何れか一方の値をとる場合を想定する。そして、基準情報生成部61は、頻度情報F[m]の示す吐出頻度が所定の頻度Fth以上となる場合(以下、所定の頻度Fth以上の頻度を「高頻度」と称する場合がある)に、閾値QL[m]に対して値qL1を設定し、閾値QH[m]に対して値qH1を設定する。また、基準情報生成部61は、頻度情報F[m]の示す吐出頻度が所定の頻度Fth未満となる場合(以下、所定の頻度Fth未満の頻度を「低頻度」と称する場合がある)に、閾値QL[m]に対して値qL2を設定し、閾値QH[m]に対して値qH2を設定する。なお、図13では、一例として、所定の頻度Fthが「0.30」である場合を例示している。
判定部62は、頻度情報F[m]の示す吐出頻度が高頻度である場合には、残留振動信号NSA[m]の周期Tcと、値qL1に設定された閾値QL[m]との比較、及び、残留振動信号NSA[m]の周期Tcと、値qH1に設定された閾値QH[m]との比較のうち、少なくとも一方を実行することで、判定情報Stt[m]を生成する。また、判定部62は、頻度情報F[m]の示す吐出頻度が低頻度である場合には、残留振動信号NSA[m]の周期Tcと、値qL2に設定された閾値QL[m]との比較、及び、残留振動信号NSA[m]の周期Tcと、値qH2に設定された閾値QH[m]との比較のうち、少なくとも一方を実行することで、判定情報Stt[m]を生成する。
図14は、吐出部D[1]〜D[M]の各々を判定対象吐出部D-Hとして駆動した場合に、吐出部D[1]〜D[M]から検出される周期Tc[1]〜Tc[M]の分布を表すヒストグラムである。このうち、図14のCase1は、吐出部D[1]〜D[M]の各々が高頻度でインクを吐出する場合の周期Tc[1]〜Tc[M]の分布を示すヒストグラムであり、図14のCase2は、吐出部D[1]〜D[M]の各々が低頻度でインクを吐出する場合の周期Tc[1]〜Tc[M]の分布を示すヒストグラムである。
なお、各ヒストグラムにおいて、吐出状態が正常な吐出部Dに対応する周期Tcを示す部分を部分E-pと称し、吐出異常に至らない程度の軽微な増粘が生じているが生じている吐出部Dに対応する周期Tcを示す部分を部分E-pvと称する。また、各ヒストグラムにおいて、気泡混入に起因する吐出異常が生じている吐出部Dに対応する周期Tcを示す部分を部分E-faと称し、異物紙粉付着に起因する吐出異常が生じている吐出部Dに対応する周期Tcを示す部分を部分E-fbと称し、増粘に起因する吐出異常が生じている吐出部Dに対応する周期Tcを示す部分を部分E-fcと称する。
なお、各ヒストグラムにおいて、吐出状態が正常な吐出部Dに対応する周期Tcを示す部分を部分E-pと称し、吐出異常に至らない程度の軽微な増粘が生じているが生じている吐出部Dに対応する周期Tcを示す部分を部分E-pvと称する。また、各ヒストグラムにおいて、気泡混入に起因する吐出異常が生じている吐出部Dに対応する周期Tcを示す部分を部分E-faと称し、異物紙粉付着に起因する吐出異常が生じている吐出部Dに対応する周期Tcを示す部分を部分E-fbと称し、増粘に起因する吐出異常が生じている吐出部Dに対応する周期Tcを示す部分を部分E-fcと称する。
図14に示すように、吐出部Dが低頻度でインクを吐出する場合には、吐出部Dが高頻度でインクを吐出する場合と比較して、周期Tcが長くなる可能性が高い。このため、本実施形態では、吐出部Dが高頻度でインクを吐出する場合には、部分E-pにより示されるような吐出状態が正常な吐出部Dに生じる残留振動の周期Tcの範囲が「qL1≦Tc≦qH1」となるように、値qL1及び値qH1を定める。また、本実施形態では、吐出部Dが低頻度でインクを吐出する場合には、部分E-p及び部分E-pvにより示されるような吐出状態が正常な吐出部Dに生じる残留振動の周期Tcの範囲が「qL2≦Tc≦qH2」となるように、値qL2及び値qH2を定める。これにより、Case1のように高頻度でインクを吐出し、且つ、異物付着による吐出異常が生じた吐出部Dに対応する部分E-fbの周期Tcと、Case2のように低頻度でインクを吐出し、且つ、軽微な増粘が生じた吐出部Dに対応する部分E-pvの周期Tcと、が略同じとなる場合であっても、両者を区別することが可能となる。
<<7.実施形態の結論>>
以上において説明したように、本実施形態に係るインクジェットプリンター1は、履歴情報HS[m]を考慮して、基準情報Q[m](閾値QL[m]及び閾値QH[m])を定めるため、低頻度でインクを吐出し且つ軽微な増粘が生じた吐出部Dと、高頻度でインクを吐出し且つ異物付着による吐出異常が生じた吐出部Dと、の区別を容易とし、吐出状態判定処理における誤判定の可能性を低減させることが可能となる。
以上において説明したように、本実施形態に係るインクジェットプリンター1は、履歴情報HS[m]を考慮して、基準情報Q[m](閾値QL[m]及び閾値QH[m])を定めるため、低頻度でインクを吐出し且つ軽微な増粘が生じた吐出部Dと、高頻度でインクを吐出し且つ異物付着による吐出異常が生じた吐出部Dと、の区別を容易とし、吐出状態判定処理における誤判定の可能性を低減させることが可能となる。
なお、本実施形態において、吐出状態判定処理における判定基準を示す閾値QH[m]は、「基準値」の一例である。また、吐出部D[m]からのインクの吐出の頻度について、所定の頻度Fth以上の頻度、つまり、高頻度は、「第1の頻度」の一例であり、所定の頻度Fth未満の頻度、つまり、低頻度は、「第2の頻度」の一例であり、高頻度でインクを吐出する吐出部D[m]に対応する閾値QH[m]に設定される値qH1は、「第1の値」の一例であり、低頻度でインクを吐出する吐出部D[m]に対応する閾値QH[m]に設定される値qH2は、「第2の値」の一例である。
<<B.変形例>>
以上の各形態は多様に変形され得る。具体的な変形の態様を以下に例示する。以下の例示から任意に選択された2以上の態様は、相互に矛盾しない範囲内で適宜に併合され得る。なお、以下に例示する変形例において作用や機能が実施形態と同等である要素については、以上の説明で参照した符号を流用して各々の詳細な説明を適宜に省略する。
以上の各形態は多様に変形され得る。具体的な変形の態様を以下に例示する。以下の例示から任意に選択された2以上の態様は、相互に矛盾しない範囲内で適宜に併合され得る。なお、以下に例示する変形例において作用や機能が実施形態と同等である要素については、以上の説明で参照した符号を流用して各々の詳細な説明を適宜に省略する。
<<変形例1>>
上述した実施形態において、閾値QH[m]は、値qH1及び値qH2の2つの値をとりうるが、3つ以上の値をとりうるものであってもよい。また、上述した実施形態において、閾値QL[m]は、値qL1及び値qL2の2つの値をとりうるが、1つの値のみをとりうるものであってもよいし、3つ以上の値をとりうるものであってもよい。
これらの場合、基準情報生成部61は、閾値QL[m]及び閾値QH[m]を、頻度情報F[m]の示す吐出頻度に応じて定めればよい。具体的には、基準情報生成部61は、頻度情報F[m]の示す吐出頻度が低くなる場合に、閾値QL[m]及び閾値QH[m]を大きい値となるように定めることが好ましい。例えば、基準情報生成部61は、頻度情報F[m]の示す吐出頻度が閾値Fth1以上の場合には、閾値QH[m]に値qH1を設定し、頻度情報F[m]の示す吐出頻度が閾値Fth1未満且つ閾値Fth2以上の場合には、閾値QH[m]に値qH1よりも大きい値qH2を設定し、頻度情報F[m]の示す吐出頻度が閾値Fth2未満の場合には、閾値QH[m]に値qH2よりも大きい値qH3を設定してもよい(但し、Fth1>Fth2)。
上述した実施形態において、閾値QH[m]は、値qH1及び値qH2の2つの値をとりうるが、3つ以上の値をとりうるものであってもよい。また、上述した実施形態において、閾値QL[m]は、値qL1及び値qL2の2つの値をとりうるが、1つの値のみをとりうるものであってもよいし、3つ以上の値をとりうるものであってもよい。
これらの場合、基準情報生成部61は、閾値QL[m]及び閾値QH[m]を、頻度情報F[m]の示す吐出頻度に応じて定めればよい。具体的には、基準情報生成部61は、頻度情報F[m]の示す吐出頻度が低くなる場合に、閾値QL[m]及び閾値QH[m]を大きい値となるように定めることが好ましい。例えば、基準情報生成部61は、頻度情報F[m]の示す吐出頻度が閾値Fth1以上の場合には、閾値QH[m]に値qH1を設定し、頻度情報F[m]の示す吐出頻度が閾値Fth1未満且つ閾値Fth2以上の場合には、閾値QH[m]に値qH1よりも大きい値qH2を設定し、頻度情報F[m]の示す吐出頻度が閾値Fth2未満の場合には、閾値QH[m]に値qH2よりも大きい値qH3を設定してもよい(但し、Fth1>Fth2)。
<<変形例2>>
上述した実施形態及び変形例において、頻度情報F[m]は、判定前期間において吐出部D[m]がインクを吐出する頻度であるが、本発明はこのような態様に限定されるものではなく、頻度情報F[m]は、判定前期間において吐出部D[m]の圧電素子PZ[m]が変位するように駆動される頻度であってもよい。例えば、頻度情報F[m]は、吐出部D[m]がインクを吐出するように駆動される頻度と、吐出部D[m]がインクを吐出しない程度に微振動するように駆動される頻度と、の和であってもよい。
上述した実施形態及び変形例において、頻度情報F[m]は、判定前期間において吐出部D[m]がインクを吐出する頻度であるが、本発明はこのような態様に限定されるものではなく、頻度情報F[m]は、判定前期間において吐出部D[m]の圧電素子PZ[m]が変位するように駆動される頻度であってもよい。例えば、頻度情報F[m]は、吐出部D[m]がインクを吐出するように駆動される頻度と、吐出部D[m]がインクを吐出しない程度に微振動するように駆動される頻度と、の和であってもよい。
<<変形例3>>
上述した実施形態及び変形例において、基準情報生成部61は、基準情報Q[m]を、頻度情報F[m]の示す頻度に応じて定めるが、本発明はこのような態様に限定されるものではなく、基準情報生成部61は、基準情報Q[m]を、判定前期間における吐出部D[m]の駆動の態様に応じて定めればよい。この場合、基準情報生成部61は、基準情報Q[m]を、吐出部D[m]におけるインクの増粘の程度と相関関係を有するように定めることが好ましい。
例えば、基準情報生成部61は、基準情報Q[m]の示す閾値QH[m]及び閾値QL[m]を、吐出部D[m]が最後にインクを吐出した単位期間Tu、または、吐出部D[m]が最後に駆動された単位期間Tuからの経過時間に応じた値に設定してもよい。具体的には、基準情報生成部61は、吐出部D[m]が最後にインクを吐出してからの経過時間が所定時間未満であり、吐出部D[m]におけるインクの増粘の程度が小さい場合には、閾値QH[m]に値qH1を、閾値QL[m]に値qL1を、それぞれ設定し、吐出部D[m]が最後にインクを吐出してからの経過時間が所定時間以上であり、吐出部D[m]におけるインクの増粘の程度が大きい場合には、閾値QH[m]に値qH2を、閾値QL[m]に値qL2を、それぞれ設定してもよい。
上述した実施形態及び変形例において、基準情報生成部61は、基準情報Q[m]を、頻度情報F[m]の示す頻度に応じて定めるが、本発明はこのような態様に限定されるものではなく、基準情報生成部61は、基準情報Q[m]を、判定前期間における吐出部D[m]の駆動の態様に応じて定めればよい。この場合、基準情報生成部61は、基準情報Q[m]を、吐出部D[m]におけるインクの増粘の程度と相関関係を有するように定めることが好ましい。
例えば、基準情報生成部61は、基準情報Q[m]の示す閾値QH[m]及び閾値QL[m]を、吐出部D[m]が最後にインクを吐出した単位期間Tu、または、吐出部D[m]が最後に駆動された単位期間Tuからの経過時間に応じた値に設定してもよい。具体的には、基準情報生成部61は、吐出部D[m]が最後にインクを吐出してからの経過時間が所定時間未満であり、吐出部D[m]におけるインクの増粘の程度が小さい場合には、閾値QH[m]に値qH1を、閾値QL[m]に値qL1を、それぞれ設定し、吐出部D[m]が最後にインクを吐出してからの経過時間が所定時間以上であり、吐出部D[m]におけるインクの増粘の程度が大きい場合には、閾値QH[m]に値qH2を、閾値QL[m]に値qL2を、それぞれ設定してもよい。
<<変形例4>>
上述した実施形態及び変形例において、基準情報Qは、吐出部D毎に定められるが、本発明はこのような態様に限定されるものではなく、基準情報Qは、ヘッドユニットHUに設けられる複数の吐出部Dに対して共通に定められるものであってもよい。
例えば、基準情報生成部61は、ヘッドユニットHUに設けられるM個の吐出部D[1]〜D[M]に対して、共通の基準情報Q(閾値QL、閾値QH)を定めてもよい。この場合、基準情報生成部61は、判定前期間におけるM個の吐出部D[1]〜D[M]の駆動の履歴を示す履歴情報HS[1]〜HS[M]の一部若しくは全部、または、判定前期間におけるM個の吐出部D[1]〜D[M]の駆動頻度または吐出頻度を示す頻度情報F[1]〜F[M]の一部若しくは全部、に基づいて、基準情報Qを定めればよい。
上述した実施形態及び変形例において、基準情報Qは、吐出部D毎に定められるが、本発明はこのような態様に限定されるものではなく、基準情報Qは、ヘッドユニットHUに設けられる複数の吐出部Dに対して共通に定められるものであってもよい。
例えば、基準情報生成部61は、ヘッドユニットHUに設けられるM個の吐出部D[1]〜D[M]に対して、共通の基準情報Q(閾値QL、閾値QH)を定めてもよい。この場合、基準情報生成部61は、判定前期間におけるM個の吐出部D[1]〜D[M]の駆動の履歴を示す履歴情報HS[1]〜HS[M]の一部若しくは全部、または、判定前期間におけるM個の吐出部D[1]〜D[M]の駆動頻度または吐出頻度を示す頻度情報F[1]〜F[M]の一部若しくは全部、に基づいて、基準情報Qを定めればよい。
<<変形例5>>
上述した実施形態及び変形例では、頻度情報Fに基づいて閾値QH及び閾値QLを定めるが、本発明はこのような態様に限定されるものではなく、頻度情報Fに基づいて図11に示す電位Vth-H及び電位Vth-Lを定めてもよい。つまり、上述した実施形態及び変形例において、基準情報Qは、閾値QHと閾値QLとを含むが、本発明はこのような態様に限定されるものではなく、基準情報Qは、電位Vth-H及び電位Vth-Lを含むものであってもよい。
上述した実施形態及び変形例では、頻度情報Fに基づいて閾値QH及び閾値QLを定めるが、本発明はこのような態様に限定されるものではなく、頻度情報Fに基づいて図11に示す電位Vth-H及び電位Vth-Lを定めてもよい。つまり、上述した実施形態及び変形例において、基準情報Qは、閾値QHと閾値QLとを含むが、本発明はこのような態様に限定されるものではなく、基準情報Qは、電位Vth-H及び電位Vth-Lを含むものであってもよい。
例えば、基準情報生成部61は、頻度情報Fの示す吐出頻度が高頻度である場合、電位Vth-Cよりも高電位の電位Vth-H1と、電位Vth-Cよりも低電位の電位Vth-L1と、を出力する。そして、特性情報生成回路9は、周期Tcを計測している期間において、残留振動信号NSAの電位が、電位Vth-H1以上となり、且つ、電位Vth-L1以下となる場合に、振幅情報Info-Sの値を、残留振動信号NSAが基準以上の振幅を有していることを示す値「1」に設定し、それ以外の場合において、振幅情報Info-Sの値を、残留振動信号NSAが基準以上の振幅を有していないことを示す値「0」に設定する。
また、基準情報生成部61は、頻度情報Fの示す吐出頻度が低頻度である場合、電位Vth-Cよりも高電位であり電位Vth-H1よりも低電位の電位Vth-H2と、電位Vth-Cよりも低電位であり電位Vth-L1よりも高電位の電位Vth-L2と、を出力する。そして、特性情報生成回路9は、周期Tcを計測している期間において、残留振動信号NSAの電位が、電位Vth-H2以上となり、且つ、電位Vth-L2以下となる場合に、振幅情報Info-Sの値を、残留振動信号NSAが基準以上の振幅を有していることを示す値「1」に設定し、それ以外の場合において、振幅情報Info-Sの値を、残留振動信号NSAが基準以上の振幅を有していないことを示す値「0」に設定する。
また、基準情報生成部61は、頻度情報Fの示す吐出頻度が低頻度である場合、電位Vth-Cよりも高電位であり電位Vth-H1よりも低電位の電位Vth-H2と、電位Vth-Cよりも低電位であり電位Vth-L1よりも高電位の電位Vth-L2と、を出力する。そして、特性情報生成回路9は、周期Tcを計測している期間において、残留振動信号NSAの電位が、電位Vth-H2以上となり、且つ、電位Vth-L2以下となる場合に、振幅情報Info-Sの値を、残留振動信号NSAが基準以上の振幅を有していることを示す値「1」に設定し、それ以外の場合において、振幅情報Info-Sの値を、残留振動信号NSAが基準以上の振幅を有していないことを示す値「0」に設定する。
上述のように、吐出部Dのキャビティ320に充填されたインクにおいて、吐出異常が生じない程度の軽微な増粘が生じている場合における残留振動の振幅と、吐出部DのノズルN付近に異物が付着して吐出異常が生じている場合における残留振動の振幅と、は類似する。本変形例では、頻度情報Fの示す吐出頻度が低く、キャビティ320に充填されたインクが増粘している可能性が高い場合には、頻度情報Fの示す吐出頻度が高く、キャビティ320に充填されたインクが増粘している可能性が低い場合と比較して、残留振動信号NSAの振幅の大きさを判定するための閾値となる電位を、電位Vth-Cに近い電位(電位Vth-H2、Vth-L2)とする。これにより、吐出部Dにおいて吐出異常に至らない程度の軽微な増粘が生じているのにも関わらず、吐出部Dにおいて異物の付着による吐出異常が生じていると誤判定する可能性を低減することができる。
<<変形例6>>
上述した実施形態及び変形例において、基準情報生成部61及び判定部62は、制御部6に含まれるが、本発明はこのような態様に限定されるものではなく、基準情報生成部61及び判定部62の一方または両方は、制御部6とは別個の回路として設けられてもよい。また、上述した実施形態及び変形例において、特性情報生成回路9は、制御部6とは別個の回路として設けられるが、特性情報生成回路9の一部または全部は、制御部6のCPUにより実現される機能ブロックとして実装されてもよい。
上述した実施形態及び変形例において、基準情報生成部61及び判定部62は、制御部6に含まれるが、本発明はこのような態様に限定されるものではなく、基準情報生成部61及び判定部62の一方または両方は、制御部6とは別個の回路として設けられてもよい。また、上述した実施形態及び変形例において、特性情報生成回路9は、制御部6とは別個の回路として設けられるが、特性情報生成回路9の一部または全部は、制御部6のCPUにより実現される機能ブロックとして実装されてもよい。
<<変形例7>>
上述した実施形態において、インクジェットプリンター1は、4個のヘッドユニットHUと、4個のインクカートリッジ31と、が1対1に対応するように設けられるが、本発明はこのような態様に限定されるものではなく、インクジェットプリンター1は、1個以上のヘッドユニットHUと、1個以上のインクカートリッジ31と、を備えていればよい。
上述した実施形態において、インクジェットプリンター1は、4個のヘッドユニットHUと、4個のインクカートリッジ31と、が1対1に対応するように設けられるが、本発明はこのような態様に限定されるものではなく、インクジェットプリンター1は、1個以上のヘッドユニットHUと、1個以上のインクカートリッジ31と、を備えていればよい。
<<変形例8>>
上述した実施形態及び変形例では、インクジェットプリンター1がシリアルプリンターである場合を想定したが、本発明はこのような態様に限定されるものではなく、インクジェットプリンター1は、ヘッドモジュールHMにおいて、複数のノズルNが記録用紙Pの幅よりも広く延在するように設けられた、所謂ラインプリンターであってもよい。
上述した実施形態及び変形例では、インクジェットプリンター1がシリアルプリンターである場合を想定したが、本発明はこのような態様に限定されるものではなく、インクジェットプリンター1は、ヘッドモジュールHMにおいて、複数のノズルNが記録用紙Pの幅よりも広く延在するように設けられた、所謂ラインプリンターであってもよい。
1…インクジェットプリンター、6…制御部、7…搬送機構、9…特性情報生成回路、10…駆動回路、20…検出回路、61…基準情報生成部、62…判定部、90…ヘッドユニット制御回路、CM…特性情報生成モジュール、D…吐出部、HD…記録ヘッド、HM…ヘッドモジュール、HU…ヘッドユニット、N…ノズル、PZ…圧電素子。
Claims (8)
- 液体を吐出する吐出部と、
前記吐出部を駆動する駆動部と、
前記吐出部が前記駆動部により駆動されたときに前記吐出部に生じる残留振動を検出する検出部と、
前記検出部の検出結果に基づいて前記残留振動の特性を示す特性情報を生成する特性情報生成部と、
前記駆動部による前記吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成する基準情報生成部と、
前記特性情報及び前記基準情報に基づいて、前記吐出部における液体の吐出状態を判定する判定部と、
を備える、
ことを特徴とする液体吐出装置。 - 前記基準情報生成部は、
所定期間における前記吐出部からの液体の吐出の頻度に応じて、前記基準値を定める、
ことを特徴とする、請求項1に記載の液体吐出装置。 - 前記特性情報は、
前記残留振動の周期を示し、
前記判定部は、
前記特性情報の示す前記残留振動の周期が、前記基準値よりも大きい場合に、
前記吐出部における液体の吐出状態が異常であると判定する、
ことを特徴とする、請求項2に記載の液体吐出装置。 - 前記基準情報生成部は、
前記所定期間における前記吐出部からの液体の吐出の頻度が第1の頻度である場合、第1の値を前記基準値として定め、
前記所定期間における前記吐出部からの液体の吐出の頻度が、前記第1の頻度よりも低い第2の頻度である場合、前記第1の値よりも大きい第2の値を前記基準値として定める、
ことを特徴とする、請求項3に記載の液体吐出装置。 - 前記特性情報は、
前記残留振動の振幅を示し、
前記判定部は、
前記特性情報の示す前記残留振動の振幅が、前記基準値よりも小さい場合に、
前記吐出部における液体の吐出状態が異常であると判定する、
ことを特徴とする、請求項2に記載の液体吐出装置。 - 吐出部から液体を吐出する液体吐出装置であって、
複数の前記吐出部を具備する記録ヘッドと、
前記記録ヘッドに設けられた複数の吐出部の各々を駆動可能な駆動部と、
前記複数の吐出部のうち一の吐出部が前記駆動部により駆動されたときに前記一の吐出部に生じる残留振動を検出する検出部と、
前記検出部の検出結果に基づいて前記残留振動の特性を示す特性情報を生成する特性情報生成部と、
前記駆動部による前記複数の吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成する基準情報生成部と、
前記特性情報及び前記基準情報に基づいて、前記一の吐出部における液体の吐出状態を判定する判定部と、
を備える、
ことを特徴とする液体吐出装置。 - 液体を吐出する吐出部と、
前記吐出部を駆動する駆動部と、
前記吐出部が前記駆動部により駆動されたときに前記吐出部に生じる残留振動を検出する検出部と、
を具備するヘッドユニットを制御するヘッドユニット制御回路であって、
前記検出部の検出結果に基づいて前記残留振動の特性を示す特性情報を生成する特性情報生成部と、
前記駆動部による前記吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成する基準情報生成部と、
前記特性情報及び前記基準情報に基づいて、前記吐出部における液体の吐出状態を判定する判定部と、
を備える、
ことを特徴とするヘッドユニット制御回路。 - 液体を吐出する吐出部と、
前記吐出部を駆動する駆動部と、
前記吐出部が前記駆動部により駆動されたときに前記吐出部に生じる残留振動を検出する検出部と、
を具備する液体吐出装置の検査方法であって、
前記検出部の検出結果に基づいて前記残留振動の特性を示す特性情報を生成するステップと、
前記駆動部による前記吐出部の駆動の履歴に応じて定められる基準値を示す基準情報を生成するステップと、
前記特性情報及び前記基準情報に基づいて、前記吐出部における液体の吐出状態を判定するステップと、
を備える、
ことを特徴とする液体吐出装置の検査方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016031693A JP2017148982A (ja) | 2016-02-23 | 2016-02-23 | 液体吐出装置、ヘッドユニット制御回路、及び、液体吐出装置の検査方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016031693A JP2017148982A (ja) | 2016-02-23 | 2016-02-23 | 液体吐出装置、ヘッドユニット制御回路、及び、液体吐出装置の検査方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017148982A true JP2017148982A (ja) | 2017-08-31 |
Family
ID=59741252
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016031693A Pending JP2017148982A (ja) | 2016-02-23 | 2016-02-23 | 液体吐出装置、ヘッドユニット制御回路、及び、液体吐出装置の検査方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017148982A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019072268A (ja) * | 2017-10-17 | 2019-05-16 | 株式会社北電子 | 遊技機 |
| JP2020082475A (ja) * | 2018-11-22 | 2020-06-04 | セイコーエプソン株式会社 | 液体吐出装置、プリントヘッド及び液体吐出方法 |
-
2016
- 2016-02-23 JP JP2016031693A patent/JP2017148982A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019072268A (ja) * | 2017-10-17 | 2019-05-16 | 株式会社北電子 | 遊技機 |
| JP2020082475A (ja) * | 2018-11-22 | 2020-06-04 | セイコーエプソン株式会社 | 液体吐出装置、プリントヘッド及び液体吐出方法 |
| JP7151415B2 (ja) | 2018-11-22 | 2022-10-12 | セイコーエプソン株式会社 | 液体吐出装置、プリントヘッド及び液体吐出方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6387955B2 (ja) | ヘッドユニット制御回路 | |
| JP6648517B2 (ja) | 液体吐出装置、液体吐出装置に設けられるヘッドユニット、及び、液体吐出装置の制御方法 | |
| JP2017114049A (ja) | 液体吐出装置、及び、液体吐出装置のヘッドユニット | |
| JP2017114020A (ja) | ヘッドユニット制御回路 | |
| JP6808934B2 (ja) | ヘッドユニット | |
| JP2016179628A (ja) | 液体吐出装置、ヘッドユニット、液体吐出装置の制御方法、及び、液体吐出装置の制御プログラム | |
| JP7110864B2 (ja) | 液体吐出装置 | |
| JP2017114021A (ja) | ヘッドユニット制御回路 | |
| JP2016049690A (ja) | 液体吐出装置、液体吐出装置の制御方法、及び、液体吐出装置の制御プログラム | |
| JP2016049691A (ja) | ヘッドユニット、液体吐出装置、液体吐出装置の制御方法、及び、液体吐出装置の制御プログラム | |
| JP7020228B2 (ja) | 印刷装置 | |
| JP2017148957A (ja) | 液体吐出装置、液体吐出装置のヘッドユニットを制御するためのヘッドユニット制御回路、及び、液体吐出装置の吐出部における液体の吐出状態の判定方法 | |
| JP6862694B2 (ja) | 液体吐出装置、及び、液体吐出装置の制御方法 | |
| US10406805B2 (en) | Liquid discharging apparatus and control method of liquid discharging apparatus | |
| JP2017056626A (ja) | 液体吐出装置、及び、液体吐出装置における液体の吐出状態判定方法 | |
| JP2017148982A (ja) | 液体吐出装置、ヘッドユニット制御回路、及び、液体吐出装置の検査方法 | |
| JP2017113915A (ja) | 液体吐出装置、液体吐出装置に設けられるヘッドユニット、及び、液体吐出装置の制御方法 | |
| JP2017164973A (ja) | 液体吐出装置、液体吐出装置のヘッドユニット、及び、液体吐出装置における液体の吐出状態の判定方法 | |
| JP2018047638A (ja) | 液体吐出装置、液体吐出装置に設けられたヘッドユニット、及び、液体吐出装置の制御方法 | |
| JP2016036938A (ja) | 液体吐出装置 | |
| JP6862693B2 (ja) | 液体吐出装置、及び、液体吐出装置の制御方法 | |
| JP6809002B2 (ja) | 液体吐出装置、及び、液体吐出装置の制御方法 | |
| JP6658149B2 (ja) | 液体吐出装置、液体吐出装置のヘッドユニット、及び、液体吐出装置における液体の吐出状態の判定方法 | |
| JP2018134781A (ja) | 印刷装置 | |
| JP6844170B2 (ja) | 液体吐出装置、及び、液体吐出装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180906 |