JP2017151010A - センサーデバイス、電子機器および移動体 - Google Patents
センサーデバイス、電子機器および移動体 Download PDFInfo
- Publication number
- JP2017151010A JP2017151010A JP2016035320A JP2016035320A JP2017151010A JP 2017151010 A JP2017151010 A JP 2017151010A JP 2016035320 A JP2016035320 A JP 2016035320A JP 2016035320 A JP2016035320 A JP 2016035320A JP 2017151010 A JP2017151010 A JP 2017151010A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- lead
- sensor device
- bent portion
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 64
- 229920005989 resin Polymers 0.000 claims description 22
- 239000011347 resin Substances 0.000 claims description 22
- 235000014676 Phragmites communis Nutrition 0.000 abstract description 4
- 230000006866 deterioration Effects 0.000 abstract 1
- 230000010355 oscillation Effects 0.000 abstract 1
- 239000000758 substrate Substances 0.000 description 32
- 230000002238 attenuated effect Effects 0.000 description 13
- 238000005452 bending Methods 0.000 description 10
- 230000007423 decrease Effects 0.000 description 6
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000000704 physical effect Effects 0.000 description 4
- 239000000428 dust Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 229910000881 Cu alloy Inorganic materials 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000010453 quartz Substances 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- 241000251468 Actinopterygii Species 0.000 description 1
- 229910000640 Fe alloy Inorganic materials 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- 229910000990 Ni alloy Inorganic materials 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 239000003822 epoxy resin Substances 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 229920002050 silicone resin Polymers 0.000 description 1
- 238000005549 size reduction Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000001721 transfer moulding Methods 0.000 description 1
Images















Landscapes
- Gyroscopes (AREA)
Abstract
【課題】離調周波数と同等の振動成分を含む衝撃が加わった場合でも角速度の検出精度の低下を低減することのできるセンサーデバイス、電子機器および移動体を提供すること。
【解決手段】物理量を検出するセンサーと、一端側に前記センサーが取り付けられ、他端側に実装用の固定部を有するリードと、を備え、前記リードの固有振動数をf1とし、前記センサーの駆動振動モードの周波数と検出振動モードの周波数との差の絶対値である離調周波数をf2としたとき、f1<f2/√2の関係を満足することを特徴とするセンサーデバイス。また、前記センサーは、検出軸まわりの角速度を検出する角速度センサーである。
【選択図】図1
【解決手段】物理量を検出するセンサーと、一端側に前記センサーが取り付けられ、他端側に実装用の固定部を有するリードと、を備え、前記リードの固有振動数をf1とし、前記センサーの駆動振動モードの周波数と検出振動モードの周波数との差の絶対値である離調周波数をf2としたとき、f1<f2/√2の関係を満足することを特徴とするセンサーデバイス。また、前記センサーは、検出軸まわりの角速度を検出する角速度センサーである。
【選択図】図1
Description
本発明は、センサーデバイス、電子機器および移動体に関するものである。
従来から、振動片およびICを収容したパッケージと、パッケージに電気的に接続されたリードと、リードを露出させつつパッケージをモールドするモールド材と、を有し、リードを介して実装基板に搭載される電子デバイスが知られている(例えば、特許文献1および特許文献2参照)。また、振動片として、駆動振動腕および検出振動腕を有し、検出振動腕の検出振動により発生する検出信号に基づいて電子デバイスに加わった角速度を検出するジャイロセンサー素子を用いることも知られている(例えば、特許文献3参照)。
しかしながら、例えば、衝撃が実装基板からリードを介してパッケージに伝わった場合、その衝撃にジャイロセンサー素子の離調周波数(駆動振動腕の共振周波数と検出振動腕の共振周波数との差の絶対値)と同等の周波数の振動成分が含まれていると、ジャイロセンサー素子からの検出信号に乗るノイズに起因して、角速度の検出精度が低下するという課題がある。
本発明の目的は、離調周波数と同等の振動成分を含む衝撃が加わった場合でも角速度の検出精度の低下を低減することのできるセンサーデバイス、電子機器および移動体を提供することにある。
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の適用例として実現することが可能である。
本適用例のセンサーデバイスは、物理量を検出するセンサーと、
一端側に前記センサーが取り付けられ、他端側に実装用の固定部を有するリードと、を備え、
前記リードの固有振動数をf1とし、前記センサーの駆動振動モードの周波数と検出振動モードの周波数との差の絶対値である離調周波数をf2としたとき、
一端側に前記センサーが取り付けられ、他端側に実装用の固定部を有するリードと、を備え、
前記リードの固有振動数をf1とし、前記センサーの駆動振動モードの周波数と検出振動モードの周波数との差の絶対値である離調周波数をf2としたとき、

これにより、離調周波数と同等の振動成分を含む衝撃が加わった場合における角速度の検出精度の低下を低減することのできるセンサーデバイスとなる。
本適用例のセンサーデバイスでは、前記センサーは、検出軸まわりの角速度を検出する角速度センサーであることが好ましい。
これにより、角速度を検出することができ、利便性の高いセンサーデバイスとなる。
これにより、角速度を検出することができ、利便性の高いセンサーデバイスとなる。
本適用例のセンサーデバイスでは、前記リードの前記検出軸に沿った方向でのバネ定数は、0.01N/mm以上、かつ、2.0N/mm以下であることが好ましい。
これにより、リードによって、離調周波数と同等の振動成分をより効果的に減衰させることができる。
これにより、リードによって、離調周波数と同等の振動成分をより効果的に減衰させることができる。
本適用例のセンサーデバイスでは、前記リードの前記検出軸に直交する方向でのバネ定数は、0.02N/mm以上、かつ、4.0N/mm以下であることが好ましい。
これにより、リードによって、離調周波数と同等の振動成分をより効果的に減衰させることができる。
これにより、リードによって、離調周波数と同等の振動成分をより効果的に減衰させることができる。
本適用例のセンサーデバイスでは、前記リードの前記検出軸に直交する方向でのバネ定数は、0.04N/mm以上、かつ、6.0N/mm以下であることが好ましい。
これにより、リードによって、離調周波数と同等の振動成分をより効果的に減衰させることができる。
これにより、リードによって、離調周波数と同等の振動成分をより効果的に減衰させることができる。
本適用例のセンサーデバイスでは、前記リードは、第1屈曲部と、前記第1屈曲部よりも前記他端側に位置する第2屈曲部と、を有していることが好ましい。
これにより、リードによって、振動成分をより効果的に減衰させることができる。
これにより、リードによって、振動成分をより効果的に減衰させることができる。
本適用例のセンサーデバイスでは、前記センサーを覆う樹脂部を有し、
前記第1屈曲部および前記第2屈曲部は、それぞれ、前記樹脂部の外側に位置していることが好ましい。
これにより、リードによって、振動成分をより効果的に減衰させることができる。
前記第1屈曲部および前記第2屈曲部は、それぞれ、前記樹脂部の外側に位置していることが好ましい。
これにより、リードによって、振動成分をより効果的に減衰させることができる。
本適用例のセンサーデバイスでは、前記リードでは、前記第2屈曲部よりも前記他端側に前記固定部が位置していることが好ましい。
これにより、リードによって、振動成分をより効果的に減衰させることができる。
これにより、リードによって、振動成分をより効果的に減衰させることができる。
本適用例のセンサーデバイスでは、前記第2屈曲部は、前記第1屈曲部と反対側に屈曲していることが好ましい。
これにより、センサーデバイスの実装基板への実装安定性が向上する。
これにより、センサーデバイスの実装基板への実装安定性が向上する。
本適用例のセンサーデバイスでは、前記第2屈曲部は、前記第1屈曲部と同じ側に屈曲していることが好ましい。
これにより、センサーデバイスの小型化を図ることができる。
これにより、センサーデバイスの小型化を図ることができる。
本適用例のセンサーデバイスでは、前記リードとして、前記センサーに対して互いに反対側に位置している第1リードおよび第2リードを有していることが好ましい。
これにより、センサーデバイスの実装基板への実装安定性が向上する。
これにより、センサーデバイスの実装基板への実装安定性が向上する。
本適用例の電子機器は、上記適用例のセンサーデバイスを有することを特徴とする。
これにより、信頼性の高い電子機器が得られる。
これにより、信頼性の高い電子機器が得られる。
本適用例の移動体は、上記適用例のセンサーデバイスを有することを特徴とする。
これにより、信頼性の高い移動体が得られる。
これにより、信頼性の高い移動体が得られる。
以下、本発明のセンサーデバイス、電子機器および移動体を添付図面に示す実施形態に基づいて詳細に説明する。
<第1実施形態>
まず、本発明の第1実施形態に係るセンサーデバイスについて説明する。
まず、本発明の第1実施形態に係るセンサーデバイスについて説明する。
図1は、本発明の第1実施形態に係るセンサーデバイスの断面図である。図2は、図1に示すセンサーデバイスが有するセンサーの断面図である。図3は、図2に示すセンサーが有するジャイロセンサー素子の平面図である。図4は、図3に示すジャイロセンサー素子の駆動振動モードを示す模式図である。図5は、図3に示すジャイロセンサー素子の検出振動モードを示す模式図である。図6は、図2に示すセンサーの平面図である。図7は、図1に示すセンサーの上面図である。図8は、図1に示すセンサーデバイスが有するリードの斜視図である。図9は、βとλとの関係を示したグラフである。図10は、リードの固有振動数と各軸方向のバネ定数との関係を示すグラフである。図11は、図1に示すセンサーデバイスの変形例を示す断面図である。なお、以下では、説明の便宜上、互いに直交する3つの軸をx軸、y軸およびz軸とする。
図1に示すセンサーデバイス1は、角速度(物理量)を検出することのできる角速度センサーデバイスであり、センサー2と、センサー2に接続された複数のリード7と、リード7の端部を露出させた状態でセンサー2をモールドする樹脂部8と、を有している。そして、このようなセンサーデバイス1では、リード7の先端部(自由端部)において、接合部材12を介して実装基板(固定対象物)9に固定されている。
(パッケージ部品)
センサー2は、検出軸まわりの角速度を検出することのできる角速度センサーであり、図2に示すように、パッケージ3と、パッケージ3内に収容されたジャイロセンサー素子4、支持基板5およびIC6と、を有している。このように、センサー2として、角速度センサーを用いることで、利便性の高いセンサーデバイス1となる。
センサー2は、検出軸まわりの角速度を検出することのできる角速度センサーであり、図2に示すように、パッケージ3と、パッケージ3内に収容されたジャイロセンサー素子4、支持基板5およびIC6と、を有している。このように、センサー2として、角速度センサーを用いることで、利便性の高いセンサーデバイス1となる。
パッケージ3は、矩形の平面視形状をなしており、上面に開口する凹部311を有するキャビティ状のベース31と、凹部311の開口を塞いでベース31に接合された板状のリッド32と、を有している。そして、センサーデバイス1内に、リッド32を下側(実装基板9側)に向けた姿勢で配置されている。パッケージ3をこのような姿勢とすることで、リード7の全長を長く確保しつつ、センサーデバイス1の低背化を図ることができる。
パッケージ3は、凹部311の開口がリッド32で塞がれることにより形成された内部空間Sを有し、この内部空間Sにジャイロセンサー素子4、支持基板5およびIC6を収容している。なお、内部空間Sは、気密封止され、減圧状態(10Pa以下程度。好ましくは真空)となっている。これにより、内部空間S内の粘性抵抗が減るため、ジャイロセンサー素子4を効率的に駆動することができる。
また、ベース31は、内部空間Sに臨んで設けられた複数の内部端子331および複数の内部端子332と、底面に設けられた複数の外部端子333と、を有している。各内部端子331は、IC6とボンディングワイヤーBWを介して電気的に接続されている。また、複数の内部端子331には、ベース31に形成された図示しない内部配線を介して内部端子332と電気的に接続されているものと、外部端子333と電気的に接続されているものと、がある。また、各内部端子332は、後述するように、導電性の接合部材59を介して支持基板5と電気的に接続されている。また、複数の外部端子333は、パッケージ3の底面における対向する一対の辺に沿って配置されている。なお、内部端子331、332や外部端子333の数としては、特に限定されず、必要に応じて適宜設定すればよい。
図3に示すように、ジャイロセンサー素子4は、振動体41と、振動体41に配置された電極と、を有している。
振動体41は、Zカット水晶板で構成され、水晶の結晶軸であるX軸(電気軸)およびY軸(機械軸)で規定されるXY平面に広がりを有し、Z軸(光軸)方向に厚みを有している。そして、振動体41は、基部42と、基部42からY軸方向両側に向けて延出する検出腕431、432と、基部42からX軸方向両側に向けて延出する連結腕441、442と、連結腕441の先端部からY軸方向両側に向けて延出する駆動腕451、452と、連結腕442の先端部からY軸方向両側に向けて延出する駆動腕453、454と、を有している。
一方、電極は、駆動信号電極481と、駆動接地電極482と、第1検出信号電極483と、第1検出接地電極484と、第2検出信号電極485と、第2検出接地電極486と、を有している。
駆動信号電極481は、駆動腕451、452の上面および下面と、駆動腕453、454の両側面と、に配置されている。一方、駆動接地電極482は、駆動腕451、452の両側面と、駆動腕453、454の上面および下面と、に配置されている。また、第1検出信号電極483は、検出腕431の上面および下面に配置され、第1検出接地電極484は、検出腕431の両側面に配置されている。一方、第2検出信号電極485は、検出腕432の上面および下面に配置され、第2検出接地電極486は、検出腕432の両側面に配置されている。また、図示しないが、これら各電極481〜486は、基部42に引き回されており、基部42において支持基板5と電気的に接続されている。
以上、ジャイロセンサー素子4の構成について簡単に説明した。このようなジャイロセンサー素子4は、次のようにして検出軸であるZ軸まわりの角速度ωzを検出する。まず、駆動信号電極481および駆動接地電極482間に駆動信号を印加すると、駆動腕451〜454が、図4に示すような駆動振動モードで振動する。駆動振動モードで駆動している状態で、ジャイロセンサー素子4にZ軸まわりの角速度ωzが加わると、図5に示すような検出振動モードが新たに励振される。この検出振動モードでは、駆動腕451〜454にコリオリの力が作用して矢印Aに示す方向の振動が励振され、この振動に呼応するように、検出腕431、432が矢印Bに示す方向(X軸方向)に屈曲振動する。このような検出振動モードの振動によって検出腕431、432に発生した電荷を第1、第2検出信号電極483、485および第1、第2検出接地電極484、486の間から検出信号として取り出し、この信号に基づいて角速度ωzを検出することができる。
なお、駆動振動モードの周波数(駆動腕451〜454の共振周波数)fdと、検出振動モードの周波数(検出腕431、432の共振周波数)fsとは、互いに異なるように設定されており、これらの差の絶対値(|fd−fs|)を「離調周波数Δf」と言う。なお、fd>fsであっても、fd<fsであってもよい。また、離調周波数Δfとしては、特に限定されないが、例えば、300Hz以上、3960Hz以下程度とすることができる。
支持基板5は、従来から知られるTAB(Tape Automated Bonding)実装用の基板である。このような支持基板5は、図6に示すように、枠状の基部51と、基部51に設けられた複数(本実施形態では6本)のリード52と、を有している。そして、基部51は、接合部材59を介してベース31に固定され、さらに、この接合部材59を介して各リード52と内部端子332とが電気的に接続されている。また、各リード52の先端部には接合部材58を介してジャイロセンサー素子4が固定され、リード52と電極481〜486とが電気的に接続されている。そのため、支持基板5を介してジャイロセンサー素子4がベース31に支持されると共に、IC6と電気的に接続された状態となっている。
図2に示すように、IC6は、凹部311の底面に固定されている。IC6には、例えば、外部のホストデバイスと通信を行うインターフェース部や、ジャイロセンサー素子4を駆動し、ジャイロセンサー素子4に加わった角速度ωzを検出する駆動/検出回路が含まれている。
以上、センサー2について説明したが、センサー2としては、角速度を検出することが出きれば、上述の構成に限定されない。例えば、ジャイロセンサー素子4の構成としては、上述の構成に限定されなし、角速度の検出軸もZ軸に限定されない。また、例えば、支持基板5を省略して、ジャイロセンサー素子4をベース31やIC6上に固定してもよい。
(樹脂部)
図1に示すように、樹脂部8は、センサー2の全域を覆っている。これにより、センサー2を衝撃、ゴミ(埃、塵)、水分から保護することができる。また、センサー2とリード7との接続部分を保護することもできる。このような樹脂部8としては、例えば、エポキシ系樹脂、シリコーン系樹脂等の各種樹脂材料を用いることができる。また、樹脂部8は、例えば、トランスファーモールドによって成形することができる。
図1に示すように、樹脂部8は、センサー2の全域を覆っている。これにより、センサー2を衝撃、ゴミ(埃、塵)、水分から保護することができる。また、センサー2とリード7との接続部分を保護することもできる。このような樹脂部8としては、例えば、エポキシ系樹脂、シリコーン系樹脂等の各種樹脂材料を用いることができる。また、樹脂部8は、例えば、トランスファーモールドによって成形することができる。
(リード)
図1に示すように、複数(本実施形態では8本)のリード7は、それぞれ、その基端側(一端側)でセンサー2のパッケージ3の底面に配置された外部端子333に導電性の接合部材11を介して固定されていると共に、外部端子333と電気的に接続されている。また、複数のリード7は、それぞれ、先端側(他端側)に固定部79を有しており、固定部79において導電性の接合部材12を介して実装基板9に固定されていると共に、実装基板9と電気的に接続されている。
図1に示すように、複数(本実施形態では8本)のリード7は、それぞれ、その基端側(一端側)でセンサー2のパッケージ3の底面に配置された外部端子333に導電性の接合部材11を介して固定されていると共に、外部端子333と電気的に接続されている。また、複数のリード7は、それぞれ、先端側(他端側)に固定部79を有しており、固定部79において導電性の接合部材12を介して実装基板9に固定されていると共に、実装基板9と電気的に接続されている。
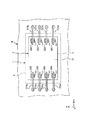
このような複数のリード7は、図7に示すように、パッケージ3の底面における対向する一対の辺に沿って配置されており、センサー2の一方側(−x軸側)に延出するように配置されている複数(4本)の第1リード7aと、他方側(+x軸側)に延出するように配置されている複数(4本)の第2リード7bと、に分かれている。センサー2に対して互いに反対側に位置する第1リード7aおよび第2リード7bを有することで、センサーデバイス1をより安定した姿勢で実装基板9に固定することができ、実装安定性を向上させることができる。
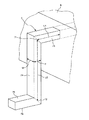
また、各リード7は、図8に示すように、長さ方向の途中に位置する第1屈曲部71と、第1屈曲部71よりも先端側(他端側)に位置する第2屈曲部72と、を有している。また、第1屈曲部71および第2屈曲部72は、共に、略直角に屈曲しており、かつ反対側に屈曲している。そのため、各リード7は、クランク状をなしている。
より具体的には、各第1リード7aは、外部端子333との固定部からセンサー2の外側へ向かって−x軸方向に延在する基端部73と、基端部73の先端からセンサー2の下側へ向かって−z軸方向に延在する中央部74と、中央部74の先端からセンサー2の外側へ向かって−x軸方向に延在する先端部75と、を有し、基端部73と中央部74との接続部が第1屈曲部71となり、中央部74と先端部75との接続部が第2屈曲部72となり、先端部75に固定部79が位置している。そのため、第1リード7aは、xy平面内で延在している。
同様に、各第2リード7bは、外部端子333との固定部からセンサー2の外側へ向かって+x軸方向に延在する基端部73と、基端部73の先端からセンサー2の下側へ向かって−z軸方向に延在する中央部74と、中央部74の先端からセンサー2の外側へ向かって+x軸方向に延在する先端部75と、を有し、基端部73と中央部74との接続部が第1屈曲部71となり、中央部74と先端部75との接続部が第2屈曲部72となっている。そして、先端部75(すなわち、第2屈曲部72よりも先端側)に固定部79が位置している。そのため、第2リード7bも、xy平面内で延在している。
各リード7をこのような構成とすると、リード7の形状が比較的簡単なものとなると共に、リード7によって、振動成分を効果的に減衰させることができる。特に、リード7の両固定端の間に2つの屈曲部が位置することで、振動成分をより効果的に減衰させることができる。また、センサー2を実装基板9から離間させた状態で、センサーデバイス1を実装基板9に固定することができるため、衝撃が実装基板9を介してセンサー2に伝わり難くなる。また、第1リード7aの固定部79と第2リード7bの固定部79との離間距離を広げることができるため、センサーデバイス1をより安定した姿勢で実装基板9に固定することができる。また、各リード7の固定部79を含む面がジャイロセンサー素子4の実装面(xy平面)と平行となり、実装基板9に対するジャイロセンサー素子4の実装角度を高精度に制御することができる。そのため、例えば、個体間での実装角度のバラつきを低減することができる。
また、各リード7は、第1屈曲部71および第2屈曲部72が共に樹脂部8の外側に位置している。これにより、第1屈曲部71および第2屈曲部72によって、実装基板9から伝わる衝撃を緩和・吸収することができる。そのため、衝撃がセンサー2へ伝わり難くなる。また、リード7によって、振動成分をより効果的に減衰させることもできる。
ここで、リード7のサイズについて、その一例を説明する。ただし、リード7のサイズは、以下のものに限定されず、リード7の構成材料等によっても異なる。リード7の横断面は、略正方形であり、幅Wおよび厚さTとしては特に限定されないが、それぞれ、0.25mm±0.10mm程度とすることができる。また、基端部73の長さ(樹脂部8から露出している部分の長さ)L1としては特に限定されないが、5.84mm±2mm程度とすることが好ましく、5.84mm±1mm程度とすることがより好ましく、5.84mm±0.5mm程度とすることがさらに好ましい。また、中央部74の長さL2としては特に限定されないが、9.54mm±3mm程度とすることが好ましく、9.54mm±1.5mm程度とすることがより好ましく、9.54mm±0.5mm程度とすることがさらに好ましい。このようなサイズとすることで、大型化を抑えつつ、後述するように離調周波数Δfと同等の振動成分を効果的に減衰することのできるリード7が得られる。
また、図1に示すように、各リード7の固定部79が並ぶ面Fと樹脂部8の下面との離間距離Dとしては特に限定されないが、5mm以上、15mm以下程度であることが好ましく、7mm以上、10mm以下程度であることがより好ましい。これにより、実装基板9と樹脂部8との間に十分な大きさの空間を形成することができ、衝撃が加わった際の実装基板9と樹脂部8との衝突を低減することができる。
また、リード7の構成材料としては、導電性とある程度の硬さを有していれば、特に限定されず、各種金属材料(合金を含む)を用いることができる。また、金属材料の中でも特にカッパーアロイ(銅合金)または鉄/ニッケル系合金(例えば、鉄57%、ニッケル42%の42アロイ)を用いることが好ましい。これらを用いることで、低抵抗かつ高強度のリード7となる。
以上、リード7の形状について説明した。次に、リード7の物性について説明する。まず、このようなセンサーデバイス1では、衝撃が実装基板9からリード7を介してセンサー2に伝わった場合、その衝撃にジャイロセンサー素子4の離調周波数Δfと同等の周波数の振動成分が含まれていると、その振動成分によって検出振動モードが励振され、ジャイロセンサー素子4からの検出信号に乗るノイズが大きくなってしまい、角速度の検出精度が低下するという問題がある。そこで、センサーデバイス1では、離調周波数Δfと同等の振動成分を含む衝撃が加わった場合でも角速度の検出精度の低下を低減することができるように、リード7の物性に特徴を持たせている。
具体的には、リード7の固有振動数(固有周波数)をf1とし、センサー2(ジャイロセンサー素子4)の離調周波数Δfをf2としたとき、下記の式(1)を満足するようにリード7の物性を設定している。
すなわち、例えば、離調周波数f2が600Hzの場合、リード7の固有振動数f1を下記の式(2)で求まるように424以下程度となるようにリード7の物性を設定している。
このような関係を満足することで、リード7によって離調周波数Δfと同等の振動成分を効果的に減衰(緩和・吸収)することができ、離調周波数Δfと同等の振動成分を含む衝撃が加わった場合でも角速度の検出精度の低下を低減することができる。なお、f1の最小値としては、特に限定されないが、例えば、f2/20<f1なる関係を満足することが好ましい。これにより、リード7の固有振動数f1が小さくなり過ぎる(すなわち、リード7が柔らかくなり過ぎる)ことを防止できる。
ここで、センサーデバイス1を実装基板9に固定した状態で、実装基板9を振動させたときのリード7の支持点(リード7の樹脂部8との境界部)への振動伝達率をλとしたとき、振動伝達率λは、以下の式(3)で表される。
ただし、β=ω/Ωであり、ωは加振角振動数(実装基板9の振動数)、Ωはリード7の固有角振動数(=2π・f1)、ζは減衰比である。
図9のグラフは、センサー2のQ値が異なる複数のセンサーデバイス1について、βとλとの関係を示したグラフである。このグラフから、Q値の大小に関わらず、β=1.0、すなわち、加振角振動数ωがリード7の固有角振動数Ωと一致したときに、リード7が共振してセンサーデバイス1が非常に大きく振動していることが分かる。反対に、β>√2の範囲では、振動伝達率λが1より小さくなっていることが分かる。そして、加振角振動数ωが離調周波数の角振動数である2π・f2と一致している(すなわち、ω=2π・f2である)としたとき、β>√2は、前述した式(1)であるf1<f2/√2となる。したがって、前述したように、f1<f2/√2の関係を満足することで、リード7によって離調周波数Δfと同等の振動成分を効果的に減衰することができ、離調周波数Δfと同等の振動成分を含む衝撃が加わった場合でも角速度の検出精度の低下を低減することができる。
次に、各リード7のバネ定数について説明する。下記の表1は、離調周波数f2(Δf)が300Hz、622Hz、800Hz、3000Hz、3960Hzの時の固有振動数f1のほぼ最大値(≒f2/√2)を示し、その固有振動数f1となるようにリード7を設定したときのx軸、y軸、z軸の各方向のバネ定数(N/mm)を示した表である。また、図10のグラフは、表1に示す固有振動数f1と各軸方向のバネ定数との関係を示すグラフである。
なお、図10中のx軸方向のバネ定数の近似式は下記式(4)で表され、y軸方向のバネ定数の近似式は下記式(5)で表され、z軸方向のバネ定数の近似式は下記式(6)で表される。
この表1および図10から、離調周波数f2が300Hz以上、3960Hz以下のときには、x軸方向(センサー2の検出軸に直交する方向。ジャイロセンサー素子4の実装面(xy平面)の面内方向)のバネ定数は、0.04N/mm以上、かつ、6.0N/mm以下であることが好ましく、y軸方向(センサー2の検出軸に直交する方向。ジャイロセンサー素子4の実装面の面内方向)のバネ定数は、0.02N/mm以上、かつ、4.0Nmm以下であることが好ましく、z軸方向(センサー2の検出軸に沿った方向。ジャイロセンサー素子4の実装面の法線方向)のバネ定数は、0.01N/mm以上、かつ、2.0N/mm以下であることが好ましい。これら少なくとも1つの条件を満足することで、リード7によって離調周波数Δfと同等の振動成分をより効果的に減衰することができる。
なお、リード7のバネ定数の測定は、例えば、次のようにして行うことができる。すなわち、まず、リード7(樹脂部8から露出している部分)を単体で用意し、このリード7を固定部79にて固定する。そして、自由端にx軸、y軸、z軸の各方向に荷重を加えることで、各軸方向のバネ定数を測定することができる。
以上、本実施形態のセンサーデバイス1について説明した。上述したように、本実施形態では、リード7とパッケージ3とが接合部材11を介して固定されると共に、リード7と外部端子333とが接合部材11を介して電気的に接続されているが、当該箇所の構成としては、特に限定されない。例えば、図11に示すように、リード7とパッケージ3とが接合部材11を介して固定され、リード7と外部端子333とがボンディングワイヤーBW1を介して電気的に接続されていてもよい。
また、リード7の数としては、8本に限定されず、1〜7本であってもよいし、9本以上であってもよく、センサーデバイス1の構成に応じて適宜設定することができる。また、本実施形態では、複数のリード7が第1リード7aと第2リード7bとに分かれているが、全てのリード7が第1リード7aまたは第2リード7bであってもよい。すなわち、全てのリード7が、パッケージ3の底面における1つの辺に沿って配置されていてもよい。
また、本実施形態では、第1、第2屈曲部71、72の屈曲角度が共に90°であったが、第1、第2屈曲部71、72の屈曲角度については、特に限定されない。ただし、基端部73と先端部75とが平行となるように、言い換えると、ジャイロセンサー素子4の実装面と固定部79が並ぶ面Fとが平行となるように、第1、第2屈曲部71、72の屈曲角度が設定されていることが好ましい。
<第2実施形態>
次に、本発明の第2実施形態に係るセンサーデバイスについて説明する。
図12は、本発明の第2実施形態に係るセンサーデバイスの断面図である。
次に、本発明の第2実施形態に係るセンサーデバイスについて説明する。
図12は、本発明の第2実施形態に係るセンサーデバイスの断面図である。
本実施形態にかかるセンサーデバイスでは、主に、リードの構成が異なっていること以外は、前述した第1実施形態のセンサーデバイスと同様である。
なお、以下の説明では、第2実施形態のセンサーデバイスに関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図12では前述した実施形態と同様の構成について、同一符号を付している。
本実施形態のセンサーデバイス1が有する各リード7では、第1屈曲部71および第2屈曲部72が共に略直角に屈曲しており、かつ同じ側に屈曲している。
より具体的には、各第1リード7aは、外部端子333との固定部からセンサー2の外側へ向かって−x軸方向に延在する基端部73と、基端部73の先端からセンサー2の下側へ向かって−z軸方向に延在する中央部74と、中央部74の先端からセンサー2の内側へ向かって+x軸方向に延在する先端部75と、を有し、基端部73と中央部74との接続部が第1屈曲部71となり、中央部74と先端部75との接続部が第2屈曲部72となり、先端部75に固定部79が位置している。
同様に、各第2リード7bは、外部端子333との固定部からセンサー2の外側へ向かって+x軸方向に延在する基端部73と、基端部73の先端からセンサー2の下側へ向かって−z軸方向に延在する中央部74と、中央部74の先端からセンサー2の内側へ向かって−x軸方向に延在する先端部75と、を有し、基端部73と中央部74との接続部が第1屈曲部71となり、中央部74と先端部75との接続部が第2屈曲部72となり、先端部75に固定部79が位置している。
リード7をこのような構成とすると、例えば、前述した第1実施形態と比較して、リード7のx軸方向の広がりを抑えることができる。そのため、センサーデバイス1の小型化を図ることができる。
このような第2実施形態によっても、前述した第1実施形態と同様の効果を発揮することができる。
<第3実施形態>
次に、本発明の第3実施形態に係るセンサーデバイスについて説明する。
図13は、本発明の第3実施形態に係るセンサーデバイスの断面図である。
次に、本発明の第3実施形態に係るセンサーデバイスについて説明する。
図13は、本発明の第3実施形態に係るセンサーデバイスの断面図である。
本実施形態にかかるセンサーデバイスでは、主に、リードの構成が異なっていること以外は、前述した第1実施形態のセンサーデバイスと同様である。
なお、以下の説明では、第3実施形態のセンサーデバイスに関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図13では前述した実施形態と同様の構成について、同一符号を付している。
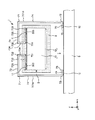
本実施形態のセンサーデバイス1では、図13に示すように、各リード7は、基端部73に2つの屈曲部(第3屈曲部731、第4屈曲部732)を有している。さらには、全ての屈曲部71、72、731、732が互いに同じ側に屈曲している。そのため、リード7は、螺旋状をなしている。また、各リード7は、第1屈曲部71、第2屈曲部72および第4屈曲部732が樹脂部8の外側に位置し、第3屈曲部731が樹脂部8の内側に位置している。
より具体的には、各第1リード7aは、外部端子333との固定部からセンサー2の内側に向かって+x軸方向に延在する第1基端部733と、第1基端部733の先端からセンサー2の上側に向かって+z軸方向に延在する第2基端部734と、第2基端部734の先端からセンサー2の外側に向かって−x軸方向に延在する第3基端部735と、第3基端部735の先端からセンサー2の下側へ向かって−z軸方向に延在する中央部74と、中央部74の先端からセンサー2の内側へ向かって+x軸方向に延在する先端部75と、を有し、第1基端部733と第2基端部734との接続部が第3屈曲部731となり、第2基端部734と第3基端部735との接続部が第4屈曲部732となり、第3基端部735と中央部74との接続部が第1屈曲部71となり、中央部74と先端部75との接続部が第2屈曲部72となり、先端部75に固定部79が位置している。
同様に、各第2リード7bは、外部端子333との固定部からセンサー2の内側に向かって−x軸方向に延在する第1基端部733と、第1基端部733の先端からセンサー2の上側に向かって+z軸方向に延在する第2基端部734と、第2基端部734の先端からセンサー2の外側に向かって+x軸方向に延在する第3基端部735と、第3基端部735の先端からセンサー2の下側へ向かって−z軸方向に延在する中央部74と、中央部74の先端からセンサー2の内側へ向かって−x軸方向に延在する先端部75と、を有し、第1基端部733と第2基端部734との接続部が第3屈曲部731となり、第2基端部734と第3基端部735との接続部が第4屈曲部732となり、第3基端部735と中央部74との接続部が第1屈曲部71となり、中央部74と先端部75との接続部が第2屈曲部72となり、先端部75に固定部79が位置している。
リード7をこのような構成とすると、例えば、前述した第1実施形態と比較して、リード7のx軸方向の広がりを抑えることができる。そのため、センサーデバイス1の小型化を図ることができる。さらには、前述した第2実施形態と比較して、x軸方向の広がりを同程度としつつ、リード7をより長くすることができる。そのため、リード7によって振動をより効果的に減衰させることができる。
<第4実施形態>
次に、本発明の第4実施形態に係るセンサーデバイスについて説明する。
図14は、本発明の第4実施形態に係るセンサーデバイスの断面図である。
次に、本発明の第4実施形態に係るセンサーデバイスについて説明する。
図14は、本発明の第4実施形態に係るセンサーデバイスの断面図である。
本実施形態にかかるセンサーデバイスでは、主に、リードの構成が異なっていること以外は、前述した第1実施形態のセンサーデバイスと同様である。
なお、以下の説明では、第4実施形態のセンサーデバイスに関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図14では前述した実施形態と同様の構成について、同一符号を付している。
本実施形態のセンサーデバイス1では、センサー2が前述した第1実施形態と上下反対の姿勢となっている。すなわち、リッド32を上側(実装基板9(固定部79が並ぶ面F)と反対側)に向けた姿勢となっている。
また、各リード7は、基端部73に2つの屈曲部(第3屈曲部731、第4屈曲部732)を有している。さらには、第3、第4屈曲部731、732が互いに同じ側に屈曲し、第1、第2屈曲部71、72が互いに同じ側に、かつ、第3、第4屈曲部731、732とは反対側に屈曲している。そのため、リード7は、蛇行した形状をなしている。また、各リード7は、第1屈曲部71、第2屈曲部72および第4屈曲部732が樹脂部8の外側に位置し、第3屈曲部731が樹脂部8の内側に位置している。
より具体的には、各第1リード7aは、外部端子333との固定部からセンサー2の内側に向かって+x軸方向に延在する第1基端部733と、第1基端部733の先端からセンサー2の下側に向かって−z軸方向に延在する第2基端部734と、第2基端部734の先端からセンサー2の外側に向かって−x軸方向に延在する第3基端部735と、第3基端部735の先端からセンサー2の下側へ向かって−z軸方向に延在する中央部74と、中央部74の先端からセンサー2の内側へ向かって+x軸方向に延在する先端部75と、を有し、第1基端部733と第2基端部734との接続部が第3屈曲部731となり、第2基端部734と第3基端部735との接続部が第4屈曲部732となり、第3基端部735と中央部74との接続部が第1屈曲部71となり、中央部74と先端部75との接続部が第2屈曲部72となり、先端部75に固定部79が位置している。
同様に、各第2リード7bは、外部端子333との固定部からセンサー2の内側に向かって−x軸方向に延在する第1基端部733と、第1基端部733の先端からセンサー2の下側に向かって−z軸方向に延在する第2基端部734と、第2基端部734の先端からセンサー2の外側に向かって+x軸方向に延在する第3基端部735と、第3基端部735の先端からセンサー2の下側へ向かって−z軸方向に延在する中央部74と、中央部74の先端からセンサー2の内側へ向かって−x軸方向に延在する先端部75と、を有し、第1基端部733と第2基端部734との接続部が第3屈曲部731となり、第2基端部734と第3基端部735との接続部が第4屈曲部732となり、第3基端部735と中央部74との接続部が第1屈曲部71となり、中央部74と先端部75との接続部が第2屈曲部72となり、先端部75に固定部79が位置している。
リード7をこのような構成とすると、例えば、前述した第1実施形態と比較して、リード7のx軸方向の広がりを抑えることができる。そのため、センサーデバイス1の小型化を図ることができる。さらには、前述した第2実施形態と比較して、x軸方向の広がりを同程度としつつ、リード7をより長くすることができる。そのため、リード7によって振動をより効果的に減衰させることができる。
[電子機器]
次に、本発明の電子機器を説明する。
次に、本発明の電子機器を説明する。
図15は、本発明の電子機器を適用したモバイル型(またはノート型)のパーソナルコンピューターの構成を示す斜視図である。この図において、パーソナルコンピューター1100は、キーボード1102を備えた本体部1104と、表示部1108を備えた表示ユニット1106と、により構成され、表示ユニット1106は、本体部1104に対しヒンジ構造部を介して回動可能に支持されている。このようなパーソナルコンピューター1100にはセンサーデバイス1が内蔵されている。
図16は、本発明の電子機器を適用した携帯電話機(スマートフォン、PHS等も含む)の構成を示す斜視図である。この図において、携帯電話機1200は、アンテナ(図示せず)、複数の操作ボタン1202、受話口1204および送話口1206を備え、操作ボタン1202と受話口1204との間には、表示部1208が配置されている。このような携帯電話機1200にはセンサーデバイス1が内蔵されている。
図17は、本発明の電子機器を適用したデジタルスチールカメラの構成を示す斜視図である。この図において、デジタルスチールカメラ1300におけるケース(ボディー)1302の背面には、表示部1310が設けられ、CCDによる撮像信号に基づいて表示を行う構成になっており、表示部1310は、被写体を電子画像として表示するファインダーとして機能する。また、ケース1302の正面側(図中裏面側)には、光学レンズ(撮像光学系)やCCDなどを含む受光ユニット1304が設けられている。そして、撮影者が表示部1310に表示された被写体像を確認し、シャッターボタン1306を押下すると、その時点におけるCCDの撮像信号が、メモリー1308に転送・格納される。このようなデジタルスチールカメラ1300は、センサーデバイス1が内蔵されている。
このような電子機器は、センサーデバイス1を備えているので、前述したセンサーデバイス1の効果を享受でき、優れた信頼性を発揮することができる。
なお、本発明の電子機器は、図15のパーソナルコンピューター、図16の携帯電話機、図17のデジタルスチールカメラの他にも、例えば、スマートフォン、タブレット端末、時計(スマートウォッチを含む)、インクジェット式吐出装置(例えばインクジェットプリンター)、ラップトップ型パーソナルコンピューター、テレビ、HMD(ヘッドマウントディスプレイ)等のウェアラブル端末、ビデオカメラ、ビデオテープレコーダー、カーナビゲーション装置、ページャー、電子手帳(通信機能付も含む)、電子辞書、電卓、電子ゲーム機器、ワードプロセッサー、ワークステーション、テレビ電話、防犯用テレビモニター、電子双眼鏡、POS端末、医療機器(例えば電子体温計、血圧計、血糖計、心電図計測装置、超音波診断装置、電子内視鏡)、魚群探知機、各種測定機器、計器類(例えば、車両、航空機、船舶の計器類)、フライトシミュレーター等に適用することができる。
[移動体]
次に、本発明の移動体を説明する。
次に、本発明の移動体を説明する。
図18は、本発明の移動体を適用した自動車を示す斜視図である。この図において、自動車1500にはセンサーデバイス1が内蔵されており、例えば、センサーデバイス1によって車体1501の姿勢を検出することができる。センサーデバイス1の検出信号は、車体姿勢制御装置1502に供給され、車体姿勢制御装置1502は、その信号に基づいて車体1501の姿勢を検出し、検出結果に応じてサスペンションの硬軟を制御したり、個々の車輪1503のブレーキを制御したりすることができる。また、センサーデバイス1は、他にもキーレスエントリー、イモビライザー、カーナビゲーションシステム、カーエアコン、アンチロックブレーキシステム(ABS)、エアバック、タイヤ・プレッシャー・モニタリング・システム(TPMS:Tire Pressure Monitoring System)、エンジンコントロール、ハイブリッド自動車や電気自動車の電池モニター等の電子制御ユニット(ECU:electronic control unit)に広く適用できる。
このような移動体は、センサーデバイス1を備えているので、前述したセンサーデバイス1の効果を享受でき、優れた信頼性を発揮することができる。
以上、本発明のセンサーデバイス、電子機器および移動体を図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。
また、前述した実施形態では、センサーとして、角速度を検出可能なジャイロセンサーを用いた構成について説明したが、センサーとしては、離調周波数を有する物理量センサーであれば特に限定されず、例えば、加速度を検出可能な加速度センサーであってもよいし、加速度と角速度とを共に検出可能な複合センサーであってもよい。
1…センサーデバイス、11、12…接合部材、2…センサー、3…パッケージ、31…ベース、311…凹部、32…リッド、331、332…内部端子、333…外部端子、4…ジャイロセンサー素子、41…振動体、42…基部、431、432…検出腕、441、442…連結腕、451、452、453、454…駆動腕、481…駆動信号電極、482…駆動接地電極、483…第1検出信号電極、484…第1検出接地電極、485…第2検出信号電極、486…第2検出接地電極、5…支持基板、51…基部、52…リード、58、59…接合部材、6…IC、7…リード、7a…第1リード、7b…第2リード、71…第1屈曲部、72…第2屈曲部、73…基端部、731…第3屈曲部、732…第4屈曲部、733…第1基端部、734…第2基端部、735…第3基端部、74…中央部、75…先端部、79…固定部、8…樹脂部、9…実装基板、1100…パーソナルコンピューター、1102…キーボード、1104…本体部、1106…表示ユニット、1108…表示部、1200…携帯電話機、1202…操作ボタン、1204…受話口、1206…送話口、1208…表示部、1300…デジタルスチールカメラ、1302…ケース、1304…受光ユニット、1306…シャッターボタン、1308…メモリー、1310…表示部、1500…自動車、1501…車体、1502…車体姿勢制御装置、1503…車輪、A、B…矢印、BW、BW1…ボンディングワイヤー、D…離間距離、F…面、L1、L2…長さ、S…内部空間、T…厚さ、W…幅、ωz…角速度
Claims (13)
- 物理量を検出するセンサーと、
一端側に前記センサーが取り付けられ、他端側に実装用の固定部を有するリードと、を備え、
前記リードの固有振動数をf1とし、前記センサーの駆動振動モードの周波数と検出振動モードの周波数との差の絶対値である離調周波数をf2としたとき、
の関係を満足することを特徴とするセンサーデバイス。 - 前記センサーは、検出軸まわりの角速度を検出する角速度センサーである請求項1に記載のセンサーデバイス。
- 前記リードの前記検出軸に沿った方向でのバネ定数は、0.01N/mm以上、かつ、2.0N/mm以下である請求項2に記載のセンサーデバイス。
- 前記リードの前記検出軸に直交する方向でのバネ定数は、0.02N/mm以上、かつ、4.0N/mm以下である請求項2に記載のセンサーデバイス。
- 前記リードの前記検出軸に直交する方向でのバネ定数は、0.04N/mm以上、かつ、6.0N/mm以下である請求項2に記載のセンサーデバイス。
- 前記リードは、第1屈曲部と、前記第1屈曲部よりも前記他端側に位置する第2屈曲部と、を有している請求項1ないし5のいずれか1項に記載のセンサーデバイス。
- 前記センサーを覆う樹脂部を有し、
前記第1屈曲部および前記第2屈曲部は、それぞれ、前記樹脂部の外側に位置している請求項6に記載のセンサーデバイス。 - 前記リードでは、前記第2屈曲部よりも前記他端側に前記固定部が位置している請求項6または7に記載のセンサーデバイス。
- 前記第2屈曲部は、前記第1屈曲部と反対側に屈曲している請求項6ないし8のいずれか1項に記載のセンサーデバイス。
- 前記第2屈曲部は、前記第1屈曲部と同じ側に屈曲している請求項6ないし8のいずれか1項に記載のセンサーデバイス。
- 前記リードとして、前記センサーに対して互いに反対側に位置している第1リードおよび第2リードを有している請求項1ないし10のいずれか1項に記載のセンサーデバイス。
- 請求項1ないし11のいずれか1項に記載のセンサーデバイスを有することを特徴とする電子機器。
- 請求項1ないし11のいずれか1項に記載のセンサーデバイスを有することを特徴とする移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016035320A JP2017151010A (ja) | 2016-02-26 | 2016-02-26 | センサーデバイス、電子機器および移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016035320A JP2017151010A (ja) | 2016-02-26 | 2016-02-26 | センサーデバイス、電子機器および移動体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017151010A true JP2017151010A (ja) | 2017-08-31 |
Family
ID=59741699
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016035320A Pending JP2017151010A (ja) | 2016-02-26 | 2016-02-26 | センサーデバイス、電子機器および移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017151010A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020159772A (ja) * | 2019-03-25 | 2020-10-01 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
| CN112729268A (zh) * | 2019-10-28 | 2021-04-30 | 精工爱普生株式会社 | 惯性测量装置、电子设备以及移动体 |
-
2016
- 2016-02-26 JP JP2016035320A patent/JP2017151010A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020159772A (ja) * | 2019-03-25 | 2020-10-01 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
| JP7183902B2 (ja) | 2019-03-25 | 2022-12-06 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
| JP2023022132A (ja) * | 2019-03-25 | 2023-02-14 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
| JP7405221B2 (ja) | 2019-03-25 | 2023-12-26 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
| CN112729268A (zh) * | 2019-10-28 | 2021-04-30 | 精工爱普生株式会社 | 惯性测量装置、电子设备以及移动体 |
| CN112729268B (zh) * | 2019-10-28 | 2023-07-11 | 精工爱普生株式会社 | 惯性测量装置、电子设备以及移动体 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6485260B2 (ja) | 物理量センサー、物理量センサー装置、電子機器および移動体 | |
| JP6575187B2 (ja) | 物理量センサー、物理量センサー装置、電子機器および移動体 | |
| JP6051885B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| CN105758395B (zh) | 物理量传感器、电子设备以及移动体 | |
| US20130074597A1 (en) | Sensor element, manufacturing method of sensor element, sensor device, and electronic apparatus | |
| US20150040664A1 (en) | Vibrating element, vibrating device, electronic apparatus, and moving object | |
| JP2014062753A (ja) | 振動片、振動子、電子デバイス、電子機器、および移動体 | |
| CN107101630A (zh) | 电子装置、电子设备以及移动体 | |
| US20150114117A1 (en) | Vibrating element, vibrator, electronic apparatus, and moving object | |
| JP2015184009A (ja) | 振動素子、電子機器、および移動体 | |
| JP2019144148A (ja) | 物理量検出デバイス、傾斜計、慣性計測ユニット、電子機器、移動体、および構造物監視システム | |
| JP2017120194A (ja) | センサー用基板、物理量検出センサー、加速度センサー、電子機器、および移動体 | |
| JP2017151010A (ja) | センサーデバイス、電子機器および移動体 | |
| CN104579225B (zh) | 振动元件、振子、振荡器、电子设备以及移动体 | |
| JP6443058B2 (ja) | 物理量センサー、電子機器および移動体 | |
| JP6398730B2 (ja) | 物理量センサー、物理量センサーの製造方法、電子機器および移動体 | |
| JP2016186479A (ja) | 物理量検出振動素子、物理量検出振動子、電子機器および移動体 | |
| CN107063225A (zh) | 电子装置、电子装置的制造方法、电子设备以及移动体 | |
| JP2016061710A (ja) | 振動素子、ジャイロ素子、電子デバイス、電子機器、および移動体 | |
| JP6492536B2 (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP2017211255A (ja) | 電子デバイス、電子デバイスの製造方法、物理量センサー、電子機器および移動体 | |
| JP6264842B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2014025742A (ja) | 振動片、ジャイロセンサー、電子機器、および移動体 | |
| JP6641874B2 (ja) | 物理量検出装置、電子機器および移動体 | |
| JP6451413B2 (ja) | 物理量センサー、電子機器および移動体 |