JP2017158251A - 電圧レベル検出装置、モータ駆動装置、モータ駆動システム、及び画像形成装置 - Google Patents
電圧レベル検出装置、モータ駆動装置、モータ駆動システム、及び画像形成装置 Download PDFInfo
- Publication number
- JP2017158251A JP2017158251A JP2016037767A JP2016037767A JP2017158251A JP 2017158251 A JP2017158251 A JP 2017158251A JP 2016037767 A JP2016037767 A JP 2016037767A JP 2016037767 A JP2016037767 A JP 2016037767A JP 2017158251 A JP2017158251 A JP 2017158251A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- voltage level
- comparison result
- phase
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/14—Electronic sequencing control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
【解決手段】電圧レベル検出装置は、制御信号に基づく複数のしきい値レベルを有し、変化する入力信号の電圧レベルを各しきい値レベルと比較して入力信号が各しきい値レベルに到達したことを示す比較結果信号を発生して出力する複数の比較器と、比較結果信号の変化を検出し、検出信号を出力する検出部と、検出信号を受け取ってから所定時間経過後にトリガ信号を出力するトリガ信号出力部と、トリガ信号を受け取ったタイミングにおける制御信号の値を示す遅延制御信号を出力する遅延制御信号出力部と、トリガ信号を受け取ったタイミングにおける比較結果信号の値を示す遅延比較結果信号を出力する遅延比較結果信号出力部と、遅延制御信号及び遅延比較結果信号を基に入力信号の電圧レベルを示す電圧レベル信号を出力する論理回路と、電圧レベル信号及び比較結果信号に基づいて制御信号を出力する制御部とを備える。
【選択図】図12
Description
所定の制御信号に基づく互いに異なる複数のしきい値レベルを有する複数の比較器であって、変化する入力信号の電圧レベルを、前記各しきい値レベルとそれぞれ比較して、前記入力信号が前記各しきい値レベルにそれぞれ到達したことを示す比較結果信号をそれぞれ発生して出力する複数の比較器と、
前記比較結果信号の変化を検出し、検出信号を出力する検出部と、
前記検出信号を受け取ってから所定時間経過後にトリガ信号を出力するトリガ信号出力部と、
前記トリガ信号を受け取ったタイミングにおける前記制御信号の値を示す遅延制御信号を出力する遅延制御信号出力部と、
前記トリガ信号を受け取ったタイミングにおける前記比較結果信号の値を示す遅延比較結果信号を出力する遅延比較結果信号出力部と、
前記遅延制御信号及び前記遅延比較結果信号を基に前記入力信号の電圧レベルを示す電圧レベル信号を出力する論理回路と、
前記電圧レベル信号及び前記比較結果信号に基づいて前記制御信号を出力する制御部と、を備えることを特徴とする。
図1は、本発明の実施形態1に係る画像形成装置200の全体構成を示す模式図である。まず、図1を参照して、画像形成装置200の全体構成について説明する。画像形成装置200は、電子写真方式を利用したタンデム型中間転写方式の画像形成装置であって、フルカラー複写機である。
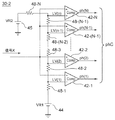
図5Aは本発明の実施形態2に係る、図1の画像形成装置200のためのモータ駆動装置102の構成を示すブロック図である。実施形態2に係るモータ駆動装置102は、実施形態1に係るモータ駆動装置101に比較して、信号増幅回路50を設けないことを特徴としている。すなわち、センサ信号がシングルエンド信号ではなく差動信号のままであり、センサS1,S2,S3(U相,V相,W相)からの差動センサ信号(U1,U1−;V1,V1−;W1,W1−)がそのまま出力されて第1の位相検出回路10、第2の位相検出回路120及び信号選択回路21に入力される。ここで、第1の位相検出回路10において、比較器11にはセンサ信号U1,U1−が入力され、比較器12にはセンサ信号V1,V1−が入力され、比較器13にはセンサ信号W1,W1−が入力されてそれぞれ位相検出される。また、第2の位相検出回路120においては、各センサ信号どうしの比較結果であるため、必ずしも差動信号を入力する必要はなく、各差動センサ信号の片側信号のみを入力してもよい。
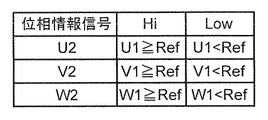
(1)センサ信号U1とセンサ信号U1−との比較結果として比較結果信号U2を得て、
(2)センサ信号V1とセンサ信号V1−との比較結果として比較結果信号V2を得て、
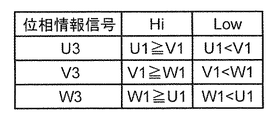
(3)センサ信号W1とセンサ信号W1−との比較結果として比較結果信号W2を得ている。さらに、第2の位相検出回路120において、センサ信号U1,V1,W1に基づいて図16のように比較することにより、比較結果信号U3,V3,W3を得ている。なお、第2の位相検出回路120において、センサ信号U1−,V1−,W1−に基づいて同様に比較しても同様の比較結果信号U3,V3,W3を得ることができる。第2の位相検出回路120は、比較結果信号U2,V2,W2及び比較結果信号U3,V3,W3のそれぞれの切り換わりエッジとエッジの区間において位相分割を行う。第2の位相検出回路120はその所定位相分割区間において、例えば図7では、図20の入力条件に従って選択信号Xを選択的に切り換えて発生している。従って、分割位相は電気角において30度で分割区間境界において連続した選択信号Xを得ることができる。正弦波において、150度から180度、0度から30度の区間は非常に直線性が高く第3の位相検出回路30において、位相レベルを検出するのに非常に有利となる。
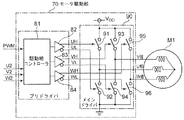
図9は本発明の実施形態3に係る、図1の画像形成装置200のためのモータ駆動装置(モータ駆動システム)103の構成を示すブロック図である。モータ駆動装置103は、図9に示すように、図5Bの実施形態2の変形例に係るモータ駆動装置102Aに比較して、
(1)モータM1の回転子を回転駆動させるために駆動電流を複数のモータコイルに選択的に流すためのモータ駆動部70と、
(2)第2の位相情報信号phBに基づいてPWM信号を発生してモータ駆動部70に出力するモータコントローラ60と
を備えたことを特徴としている。それ以外の構成は実施形態2の変形例と同様であり、その説明を省略する。
図12は本発明の実施形態4に係る、電圧レベル検出装置を備えた第3の位相検出回路(以下、位相検出回路という。)30Aの構成を示すブロック図である。図13は図12の位相検出回路30Aの動作を示すタイミングチャートである。図14Aは図12のヒステリシスコンパレータ(比較器;以下、コンパレータという。)311,312の入出力特性を示すグラフである。図14Bは図12の論理回路316の動作を示す真理値表である。なお、図14Bにおいて「0x」は16進数表示を表す。図14Cは図12の位相検出回路30Aにおける信号D[29:1]を信号電圧D19〜D1に簡略化して示した場合の選択信号を示すグラフである。図14Dは図12の位相検出回路30Aの動作を示す別のタイミングチャートである。以下、図12〜図14Dを参照して図12の位相検出回路30Aの構成、動作及び作用効果について説明する。
(1)比較結果信号SLICE_Aは、選択信号Xと、奇数番号のスイッチSW1,SW3,…,SW29のうちの1つからの基準電圧DAAとの比較結果を示す。
(2)比較結果信号SLICE_Bは、選択信号Xと、偶数番号のスイッチSW2,SW4,…,SW28のうちの1つからの基準電圧DABとの比較結果を示す。なお、基準電圧DAA,DABは図12の例えば信号D1〜D29のレベルの固定値であって、順次変化するのはそれを選択した信号SLICE_A、SLICE_Bである。
(3)信号Aは遅延回路321からのトリガパルス信号DA_SW_PLUS_Dを受け取ったタイミングにおける比較結果信号SLICE_A(遅延比較結果信号)を示す。
(4)信号Bは遅延回路321からのトリガパルス信号DA_SW_PLUS_Dを受け取ったタイミングにおける比較結果信号SLICE_B(遅延比較結果信号)を示す。
(5)信号CはスイッチSW1〜SW29の状態を示す信号(遅延制御信号)であって、各ビットが1のとき対応するスイッチがオンとなり、0のとき対応するスイッチがオフとなる。ここで、29個のスイッチSW1〜SW29のうち互いに隣接する2つのスイッチだけが必ずオンの状態になる。
(6)信号Dは例えば信号D4と信号D3の間に選択信号のレベルがあるとき、信号D29〜D1と選択信号の比較結果をビット列で表し、信号D29〜D4はすべて「0」、信号D3〜D1はすべて「1」になるので2進数で表すと「0000000000_0000000000_000000111b」となり、十進数で表すと「7」になる。
(1)例えばSW1,SW2がオンの状態で、選択信号Xの電圧が2つの電圧より低い状態301の場合は、信号A,Bは0となる。論理回路316は信号C=0x0000_0003と信号A=0,B=0とをエンコード(符号化)して出力信号D=0x0000_0000(図13の状態306)を出力する。
(2)例えばSW1,SW2がオンの状態で、選択信号Xの電圧が2つの電圧の間にある状態302の場合、信号A=1、信号B=0となる。論理回路316は信号C=0x0000_0003と、A=1,B=0をエンコードして出力信号D=0x0000_0001(図13の状態305)を出力する。
(3)例えばSW1,SW2がオンの状態で、選択信号Xの電圧が2つの電圧より高い状態303の場合、信号A=1、信号B=1となる。論理回路316は信号C=0x0000_0003と、信号A=1,B=1をエンコードして出力信号D=0x0000_0003(図13の状態306)を出力する。
ENCB=(D[2]^D[4])|(D[6]^D[8])|(D[10]^D[12])|(D[14]^D[16])|(D[18]^D[20])|(D[22]^D[24])|(D[26]^D[28]) (2)
(2)encb_neg=0のとき:
ENCB=((D[2]^D[4])|(D[6]^D[8])|(D[10]^D[12])|(D[14]^D[16])|(D[18]^D[20])|(D[22]^D[24])|(D[26]^D[28])) (3)
本実施形態に係るセンサS1〜S3は、モータM1の回転子(ロータ)を検出する磁気センサであり、一般的にホール素子が使用される。また、回転子が回転することで発生する磁束密度は正弦波である場合が多く、すなわち、磁気センサからの信号も正弦波である場合が多い。ただし、回転子が回転する際に発生し固定される磁気センサにて受ける磁束密度が必ずしも綺麗な正弦波ではなく歪んだ正弦波である場合がある。また、センシングする磁束密度が磁気センサの許容値を超えるために起こる磁気飽和により、磁気センサ出力が飽和し台形波に近い出力となる場合もある。しかしながら、電気角−60°〜60°区間において正弦波又はそれに近い波形の信号であれば、本発明においては正確な複数の位相検出が可能である。
特許文献1には、位相検出を行う目的で、モータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置について開示されている。ここで、複数のセンサ信号と所定の複数のしきい値レベルとをしきい値ごとに設けられた比較器により比較して位相を検出し、検出した位相を示す位相情報信号を出力する。また、センサ信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出する構成が開示される。しかし、モータ位相の検出精度を高めようとした場合、比較しきい値レベルの電圧差が小さくなり、センサ信号の電圧変化に対して、敏感に比較結果が変化する。特許文献1の方式では、所定の閾値レベルに到達してからそれを示す信号の遅延より、比較結果の変化の間隔が短い場合の誤動作に備えるために、用意すべきしきい値レベルとそれに達したことを判定するしきい値レベル毎に設けられた比較器の数が多くなるという問題は解消できていない。
11,12,13…比較器、
20…位相分割回路、
21…信号選択回路、
30,30A…第3の位相検出回路、
31−1〜31−N…位相検出器、
32−1〜32−(N−1)…電圧源、
40…信号合成回路、
41−1〜41−N,42〜42−N…比較器、
43,44,45…電圧源、
47−1〜47−N,48−1〜48−N…抵抗、
50,50a…信号増幅回路、
51,52,53,51a,52a,53a…増幅器、
60…モータコントローラ、
70…モータ駆動部、
80…プリドライバ、
81…駆動相コントローラ、
82,83,84…駆動増幅器、
90…メインドライバ、
91〜96…スイッチ素子、
101,102,102A,103…モータ駆動装置、
200…画像形成装置、
201Y,201M,201C,201Bk…画像形成ユニット、
202Y,202M,202C、202Bk…感光体ドラム、
203Y,203M,203C,203Bk…帯電ローラ、
204Y,204M,204C,204Bk…現像装置、
205Y,205M,205C,205Bk…クリーニング装置、
206…光書込ユニット、
207A…転写ユニット、
207…中間転写ベルト、
208Y,208M,208C,208Bk…1次転写ローラ、
209…ベルトクリーニング装置、
210…2次転写ローラ、
210A…2次転写ユニット、
210a…2次転写部、
213…定着ユニット、
217a,217b…給紙カセット、
221…レジストローラ、
229…通常搬送路、
230…両面搬送路、
231…操作部、
232…ドラム駆動モータ、
233…ベルト駆動モータ、
234…2次転写バイアス回路、
235…制御部、
236…CPU、
238…RAM、
242…温湿度センサ、
245…装置本体、
250…画像読取部
260…画像形成部、
270…給紙部、
280…排紙部
290…給紙搬送部、
310,320…制御回路、
311,312…ヒステリシスコンパレータ、
313,314,315−1〜315−30…遅延型フリップフロップ、
316…論理回路、
317…演算回路、
321…遅延回路、
322…基準電圧源、
401…アナログ回路、
402…デジタル回路、
M1…モータ、
P…用紙、
R…抵抗、
S1,S2,S3…磁気センサ、
SW1〜SW29…スイッチ。
Claims (9)
- 所定の制御信号に基づく互いに異なる複数のしきい値レベルを有する複数の比較器であって、変化する入力信号の電圧レベルを、前記各しきい値レベルとそれぞれ比較して、前記入力信号が前記各しきい値レベルにそれぞれ到達したことを示す比較結果信号をそれぞれ発生して出力する複数の比較器と、
前記比較結果信号の変化を検出し、検出信号を出力する検出部と、
前記検出信号を受け取ってから所定時間経過後にトリガ信号を出力するトリガ信号出力部と、
前記トリガ信号を受け取ったタイミングにおける前記制御信号の値を示す遅延制御信号を出力する遅延制御信号出力部と、
前記トリガ信号を受け取ったタイミングにおける前記比較結果信号の値を示す遅延比較結果信号を出力する遅延比較結果信号出力部と、
前記遅延制御信号及び前記遅延比較結果信号を基に前記入力信号の電圧レベルを示す電圧レベル信号を出力する論理回路と、
前記電圧レベル信号及び前記比較結果信号に基づいて前記制御信号を出力する制御部と、を備えることを特徴とする電圧レベル検出装置。 - 前記所定時間は、前記複数の比較器の動作遅延時間を超える時間であることを特徴とする請求項1記載の電圧レベル検出装置。
- 前記電圧レベル信号は所定のしきい値レベルと比較した結果を示す信号であることを特徴とする請求項1又は2記載の電圧レベル検出装置。
- 前記電圧レベル信号は、前記入力信号の所定の位相の状態のときにオールゼロのビットを有し、前記電圧レベル信号の下位から上位に向かって順次増加するように変化するように構成されたことを特徴とする請求項1〜3のうちのいずれか1つに記載の電圧レベル検出装置。
- 前記電圧レベル信号は、前記電圧レベル信号の変化点において1ビットだけ変化するグレイコードで表されることを特徴とする請求項4記載の電圧レベル検出装置。
- 請求項1〜5のうちのいずれか1つ記載の電圧レベル検出装置と、
前記電圧レベル信号に基づいて検出された位相検出情報信号に基づいてモータを駆動制御する別の制御部とを備えたことを特徴とするモータ駆動装置。 - 請求項6記載のモータ駆動装置と、
前記別の制御部により駆動制御されるモータとを備えたことを特徴とするモータ駆動システム。 - 請求項7記載のモータ駆動システムを備えたことを特徴とする画像形成装置。
- 請求項7記載のモータ駆動システムを備えたことを特徴とする搬送装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016037767A JP6627574B2 (ja) | 2016-02-29 | 2016-02-29 | 電圧レベル検出装置、モータ駆動装置、モータ駆動システム、及び画像形成装置 |
| US15/434,104 US9991828B2 (en) | 2016-02-29 | 2017-02-16 | Voltage level detecting device, motor driving apparatus, motor driving system, and method for detecting voltage level |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016037767A JP6627574B2 (ja) | 2016-02-29 | 2016-02-29 | 電圧レベル検出装置、モータ駆動装置、モータ駆動システム、及び画像形成装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017158251A true JP2017158251A (ja) | 2017-09-07 |
| JP6627574B2 JP6627574B2 (ja) | 2020-01-08 |
Family
ID=59679015
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016037767A Expired - Fee Related JP6627574B2 (ja) | 2016-02-29 | 2016-02-29 | 電圧レベル検出装置、モータ駆動装置、モータ駆動システム、及び画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9991828B2 (ja) |
| JP (1) | JP6627574B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7325660B1 (ja) * | 2021-10-29 | 2023-08-14 | 東芝三菱電機産業システム株式会社 | ドライブシステム及び制御方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0334725A (ja) * | 1989-06-30 | 1991-02-14 | Nec Corp | アナログ・ディジタル変換器 |
| JPH11211760A (ja) * | 1998-01-29 | 1999-08-06 | Mitsubishi Electric Corp | ピーク検出器、並びにそれを用いた高電圧機器の絶縁監視装置及びシステム |
| JP2000209889A (ja) * | 1999-01-12 | 2000-07-28 | Meidensha Corp | 3相位置検出装置 |
| US20050166686A1 (en) * | 2004-02-02 | 2005-08-04 | Toshihisa Yamamoto | Torque direction detecting device for brushless motor |
| JP2015019563A (ja) * | 2013-06-10 | 2015-01-29 | 株式会社リコー | 制御装置、駆動装置および画像形成装置 |
| JP2015084487A (ja) * | 2013-10-25 | 2015-04-30 | 富士通株式会社 | 受信回路 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5369310A (en) * | 1992-06-01 | 1994-11-29 | Hewlett-Packard Corporation | CMOS power-on reset circuit |
| US5867116A (en) * | 1996-07-17 | 1999-02-02 | Analog Devices, Inc. | Multi-stage interpolating analog-to-digital conversion |
| KR100369123B1 (ko) * | 1998-12-22 | 2003-03-17 | 주식회사 하이닉스반도체 | 데이터출력버퍼 |
| US6784810B2 (en) * | 2001-05-07 | 2004-08-31 | National Semiconductor Corporation | A/D converter with comparators and low-power detection mode for resistive matrix keyboards |
| US8228045B2 (en) * | 2008-05-13 | 2012-07-24 | Texas Instruments Incorporated | Quantized voltage feed-forward a power factor correction controller |
| JP6014989B2 (ja) | 2011-10-28 | 2016-10-26 | 株式会社リコー | モータ駆動制御装置及び方法 |
| EP2590329B1 (en) * | 2011-11-07 | 2016-05-11 | Linear Technology Corporation | Systems and methods for randomizing component mismatch in an adc |
| JP6481254B2 (ja) | 2014-03-06 | 2019-03-13 | 株式会社リコー | 位相検出装置、モータ駆動制御装置、及びモータ装置 |
| JP6387667B2 (ja) | 2014-04-21 | 2018-09-12 | 株式会社リコー | 信号増幅装置及びそれを備えたモータ駆動制御装置 |
| JP6361428B2 (ja) | 2014-09-30 | 2018-07-25 | 株式会社リコー | 電圧レベル検出装置及び方法、モータ駆動制御装置、及びモータ装置 |
-
2016
- 2016-02-29 JP JP2016037767A patent/JP6627574B2/ja not_active Expired - Fee Related
-
2017
- 2017-02-16 US US15/434,104 patent/US9991828B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0334725A (ja) * | 1989-06-30 | 1991-02-14 | Nec Corp | アナログ・ディジタル変換器 |
| JPH11211760A (ja) * | 1998-01-29 | 1999-08-06 | Mitsubishi Electric Corp | ピーク検出器、並びにそれを用いた高電圧機器の絶縁監視装置及びシステム |
| JP2000209889A (ja) * | 1999-01-12 | 2000-07-28 | Meidensha Corp | 3相位置検出装置 |
| US20050166686A1 (en) * | 2004-02-02 | 2005-08-04 | Toshihisa Yamamoto | Torque direction detecting device for brushless motor |
| JP2015019563A (ja) * | 2013-06-10 | 2015-01-29 | 株式会社リコー | 制御装置、駆動装置および画像形成装置 |
| JP2015084487A (ja) * | 2013-10-25 | 2015-04-30 | 富士通株式会社 | 受信回路 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170250630A1 (en) | 2017-08-31 |
| JP6627574B2 (ja) | 2020-01-08 |
| US9991828B2 (en) | 2018-06-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9294021B2 (en) | Control device, driving device, and image forming apparatus | |
| US9019518B2 (en) | Image forming apparatus generating overwriting image data | |
| US10503110B2 (en) | Image forming apparatus, developing device, and image forming unit | |
| JP6569210B2 (ja) | 位相検出装置及び方法、モータ駆動制御装置、モータ装置及びシート搬送装置 | |
| JP6627574B2 (ja) | 電圧レベル検出装置、モータ駆動装置、モータ駆動システム、及び画像形成装置 | |
| JP5901248B2 (ja) | 画像形成装置 | |
| US10359717B2 (en) | Image forming apparatus and correction of speed fluctuation of a sheet member through the image formatting apparatus | |
| JP2008158076A (ja) | 画像形成装置のシート搬送制御装置 | |
| JP6569635B2 (ja) | モーター制御装置、及び画像形成装置 | |
| JP5595115B2 (ja) | 画像形成装置 | |
| US20140265993A1 (en) | Motor control apparatus, motor control system and image forming apparatus | |
| US10044313B2 (en) | Voltage control apparatus, motor unit, image forming apparatus and voltage control method | |
| JP2009098172A (ja) | 画像形成装置 | |
| JP5672904B2 (ja) | 負荷駆動装置と画像読取装置および画像形成装置 | |
| JP2007298868A (ja) | 画像形成装置及び画像形成方法 | |
| US20080019714A1 (en) | Image forming apparatus and print head | |
| JP6337592B2 (ja) | 回転検出装置及び画像形成装置 | |
| JP2006276428A (ja) | 画像形成方法及びこれを用いた装置 | |
| JP5173851B2 (ja) | 画像形成装置 | |
| JP2005181507A (ja) | 画像形成装置およびその速度制御方法 | |
| JP2010274574A (ja) | 画像形成装置及びプログラム | |
| JP6798306B2 (ja) | 位相調整装置、位相検出装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 | |
| JP2019154236A (ja) | 制御装置、駆動装置および画像形成装置 | |
| JP6319183B2 (ja) | 画像形成装置 | |
| JP2016170253A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191023 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191118 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6627574 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |