JP2017158337A - 電動車両の制御装置、電動車両の制御システムおよび電動車両の制御方法 - Google Patents
電動車両の制御装置、電動車両の制御システムおよび電動車両の制御方法 Download PDFInfo
- Publication number
- JP2017158337A JP2017158337A JP2016040367A JP2016040367A JP2017158337A JP 2017158337 A JP2017158337 A JP 2017158337A JP 2016040367 A JP2016040367 A JP 2016040367A JP 2016040367 A JP2016040367 A JP 2016040367A JP 2017158337 A JP2017158337 A JP 2017158337A
- Authority
- JP
- Japan
- Prior art keywords
- slip
- target
- rotation speed
- drive wheel
- motor rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
Description
本発明は、上記問題に着目されたもので、その目的とするところは、駆動輪のスリップ制御の収束までの時間を短縮化する電動車両の制御装置、電動車両の制御システムおよび電動車両の制御方法を提供することである。
第二の発明では、電動車両の制御システムは、目標駆動輪速度に基づいて電動モータの目標モータ回転速度を算出する目標モータ回転速度算出部と、駆動輪のスリップが検出されたときに、算出された目標モータ回転速度とモータ回転速度とに基づいて電動モータを駆動するスリップ制御用指令トルクを算出するスリップ用指令トルク算出部と、を有するようにした。
第三の発明では、電動モータによって車輪を駆動する車両の制御方法は、目標駆動輪速度に基づいて電動モータの目標モータ回転速度を算出する目標モータ回転速度算出ステップと、駆動輪のスリップが検出されたときに、算出された目標モータ回転速度とモータ回転速度に基づいて電動モータを駆動するスリップ制御用指令トルクを算出するスリップ用指令トルク算出ステップと、を有するようにした。
[電動自動車システム構成]
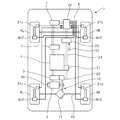
図1は実施例1の制御装置が適用された電動車両のシステム構成図である。後輪RL,RRには、ドライブシャフト10とディファレンシャルギヤ11と減速機構12を介して電動モータ2が接続さている。電動車両1は、電動モータ2の駆動トルクにより後輪RL,RRを駆動して走行する。また電動車両1は、減速時には、電動モータ2の回生トルクにより減速走行する。電動モータ2は、モータ回転速度を検出するレゾルバ30を有する。検出されたモータ回転速度Vmおよびモータ制御装置20の指令電流Icに基づいて作動するインバータ3から送受される電力により駆動トルクもしくは回生トルクを制御する。インバータ3には高電圧バッテリ4が接続されている。高電圧バッテリ4は、バッテリ制御装置21により充電状態や発熱状態等が監視および制御される。また、高電圧バッテリ4にはDC-DCコンバータ5により降圧して充電可能な低電圧バッテリ7が接続されている。
ブレーキ制御装置22には、各輪の車輪速を検出する車輪速度センサ31a,31b,31c,31dが接続されている。車輪速度センサ31は、各輪の車輪速度を検出する。
アクセルペダル操作量センサ32は、運転者によるアクセルペダル操作量Paを検出する。ブレーキ操作量センサ33は、運転者によるブレーキペダル操作量Pbを検出する。車両制御装置23は、Pa、Pb、車速等に応じた運転者の要求トルクTdを算出する。車両制御装置23は、モータ制御装置20およびブレーキ制御装置22にTdを出力する。
モータ制御装置20と、バッテリ制御装置21と、ブレーキ制御装置22と、車両制御装置23とはCAN通信線24により接続され、相互に情報を送受信可能に構成されている。
図2は電動モータ2による駆動走行時の制御ブロック図である。実施例1の電動車両では、通常走行時にはアクセルペダル操作量Pa、ブレーキペダル操作量Pb、車速等から算出した運転者の要求トルクTdに応じて電動モータ2の出力トルクを制御する。一方、後輪RL,RR(駆動輪)がスリップしたと判断したときには、駆動輪の目標車輪速度(目標駆動輪速度)Vwt_driveを設定しVwt_driveを実現するように電動モータ2の出力トルクを制御する。
(ブレーキ制御装置)
ブレーキ制御装置22は、前輪FL,FRの車輪速度(従動輪速度)Vw_driven、後輪RL,RRの車輪速度(駆動輪速度)Vw_driveを入力する。ブレーキ制御装置22は、車両制御装置23に、Vw_drivenとVw_driveを出力する。
車両制御装置23は、要求トルク算出部23a、車体加速度算出部23b、目標スリップ率算出部23c、目標駆動輪速度算出部23d、スリップ制御判断部23eおよび目標モータ回転速度算出部23fを有している。
要求トルク算出部23aは、アクセルペダル操作量Pa、ブレーキペダル操作量Pb、従動輪速度Vw_drivenを入力する。要求トルク算出部23aは、Pa、Pb、Vw_drivenから運転者の要求トルクTdを算出する。
車体加速度算出部23bは、従動輪速度Vw_drivenを入力する。車体加速度算出部23bは、Vw_drivenに基づいて車体加速度Avを算出する。
目標スリップ率算出部23cは、車体加速度Avを入力する。目標スリップ率算出部23cは、Avに基づいて駆動輪の目標スリップ率Rt_slipを設定する。
Vwt_drive = Va + dV1 … (1)
目標駆動輪速度算出部23dは、Vw_drivenがVa以上のときには、Vwt_driveを次の式(2)により算出する。
Vwt_drive = Vw_driven + dV1 … (2)
実施例1では発進時の加速を重視し、ある程度車速が発生するまで(Vw_driven < Vaのとき)は、駆動輪のスリップ量をある程度許容するために、一定値であるVaに基づいて目標駆動輪速度Vwt_driveを算出している。しかし、Vaを、従動輪速度Vw_drivenまたは駆動輪速度Vw_driveに応じて可変に設定するようにしても良く特に限定しない。またはVw_driven < Vaのときであっても、式(2)によりVwt_driveを算出するようにしても良い。実施例1では、dV1を一定値に設定しているが、Vw_drivenまたはVw_driveに応じて可変に設定するようにしても良く特に限定しない。
スリップ制御判断部23eは、モータ回転速度Vmの駆動輪速度換算値がスリップ開始閾値Th_start以上となったときに、スリップ制御を開始すると判断する。スリップ制御判断部23eは、Th_startを次の式(3)により算出する。
Th_start = Vwt_drive - dV2 … (3)
実施例1では、dV2を一定値に設定しているが、Vw_drivenまたはVw_driveに応じて可変に設定するようにしても良く特に限定しない。なお、Vmの駆動輪速度換算値は、Vmに電動モータ2と駆動輪(後輪RL,RR)との間にある減速機構12の減速比をかけて求めることができる。
Th_end = Vwt_driven + dV3 … (4)
実施例1では、dV3を一定値に設定しているが、Vw_drivenまたはVw_driveに応じて可変に設定するようにしても良く特に限定しない。
式(3)では、Th_startをVwt_driveに基づいて算出している。Vwt_driveは、式(2)に示すようにVw_drivenに基づいて算出されていることから、Th_startはVw_drivenに基づいて算出されているとも言える。すなわち、スリップ制御判断部23eは、Vw_driveと、Vw_drivenに基づいて算出されたTh_startおよびTh_endとの比較によって、スリップ制御の開始を判断する。
なおスリップ制御判断部23eでは、Th_startおよびTh_endとの比較対象として、車輪速度センサ31が検出したVw_driveを用いるのではなく、レゾルバ30が検出したVmの駆動輪速度換算値を用いている。
目標モータ回転速度算出部23fは、スリップフラグFs、目標駆動輪速度Vwt_driveを入力する。目標モータ回転速度算出部23fは、Fs=1のときに、目標モータ回転速度Vmtを算出する。目標モータ回転速度算出部23fは、減速機構12の減速比を考慮して、Vwt_driveに相当するVmtを算出する。
モータ制御装置20は、スリップ制御トルク算出部20a、トルク制御部20b、指令電流算出部20cを有している。
スリップ制御トルク算出部20aは、目標モータ回転速度Vmt、モータ回転速度Vmを入力する。スリップ制御トルク算出部20aは、スリップ制御時に電動モータ2から出力するトルクを制御するスリップ制御トルクTc_slipを算出する。スリップ制御トルク算出部20aは、VmをVmtに近づけるようにフィードバック制御を行うTc_slipを算出する。
トルク制御部20bは、スリップフラグFs、要求トルクTd、スリップ制御トルクTc_slipを入力する。トルク制御部20bは、電動モータ2に出力させるトルクを指令トルクTcとして算出する。トルク制御部20bは、Fs=1のときには、Tc=Tc_slipに設定する。トルク制御部20bは、Fs=0のときには、Tc=Td(要求トルク)に設定する。
指令電流算出部20cは、指令トルクTcを入力する。指令電流算出部20cは、Tcに基づいて電動モータ2に供給する電流を指令電流Icとして算出する。
図3は車両制御装置23において行われる処理の流れを示すフローチャートである。
ステップS1では、車体加速度算出部23bにおいて車体加速度Avを算出して、ステップS2へ移行する。
ステップS2では、目標スリップ率算出部23cにおいて目標スリップ率Rt_slipを算出して、ステップS3へ移行する。
ステップS3では、目標駆動輪速度算出部23dにおいて目標駆動輪速度Vwt_driveを算出して、ステップS4へ移行する。
ステップS4では、スリップ制御判断部23eにおいてスリップフラグFsを設定して、ステップS5へ移行する。
ステップS5では、目標モータ回転速度算出部23fにおいて、Fs=1であるか否かを判定する。Fs=1のときにはステップS6へ移行し、Fs=0のときには処理を終了する。
ステップS6では、目標モータ回転速度算出部23fにおいて、目標モータ回転速度Vmtを算出して、処理を終了する。
ステップS11では、駆動輪速度Vw_driveがスリップ開始閾値Th_start以上であるか否かを判定する。Vw_driveがTh_start以上であるときには、ステップS12へ移行する。Vw_driveがTh_start未満であるときには、ステップS14へ移行する。
ステップS12では、Fs=1に設定して、ステップS3へ移行する。
ステップS13では、駆動輪速度Vw_driveがスリップ終了閾値Th_end以上であるか否かを判定する。Vw_driveがTh_end以上であるときには、ステップS12へ移行する。Vw_driveがTh_end未満であるときには、ステップS14へ移行する。
ステップS14では、Fs=0に設定して、処理を終了する。
ステップS21では、スリップフラグFs=1かつアクセルペダルオンフラグFa=1であるか否かを判定する。Fs=1かつFa=1であるときには、ステップS12へ移行する。Fs=1かつFa=1でないときには、ステップS14へ移行する。アクセルペダルオンフラグFa=1のときには、運転者によりアクセルペダルが操作されていることを示す。Fa=0のときには、運転者がアクセルペダルを離していることを示す。Fs=1のときであっても、運転者によりアクセルペダルが操作されていないときにはスリップ制御を開始しないようにしている。
ステップS22では、スリップ制御トルク算出部20aにおいて、スリップ制御トルクTc_slipを算出する。
ステップS23では、トルク制御部20bにおいて、指令トルクTc=Tc_slipに設定する。
ステップS24では、トルク制御部20bにおいて、Tc=Td(要求トルク)に設定する。
ステップS25では、指令電流算出部20cにおいて、Tcに基づいて電動モータ2に供給する電流を指令電流Icとして算出する。
図6は比較例の電動モータ2による駆動走行時の制御ブロック図である。比較例の制御ブロック図について説明するが、実施例1(図2)と同じ構成については同一の符号を付して説明を省略する。
車両制御装置23は、スリップ制御トルク算出部23gを有する。スリップ制御トルク算出部23gは、スリップフラグFs、目標駆動輪速度Vwt_driveを入力する。スリップ制御トルク算出部23gは、Fs=1のときにスリップ制御トルクTc_slipを算出する。スリップ制御トルク算出部23gは、Vw_driveをVwt_driveに近づけるようにフィードバック制御を行うTc_slipを算出する。
比較例では、車両制御装置23のスリップ制御トルク算出部23gにおいて、Vw_driveによるフィードバック制御を行っている。しかし電動モータ2の制御の位相に対して、車輪速度センサ31において検出するVw_driveの位相が遅れるため、制御の収束が遅れるおそれがあった。
そこで実施例1では、図2に示すように、フィードバック制御を行うスリップ制御トルク算出部20aをモータ制御装置20に設けるようにした。さらにスリップ制御トルク算出部20aはモータ回転速度によるフィードバック制御を行うようにした。
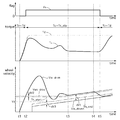
図7は比較例の低μ路における車両発進時のスリップ制御時のタイムチャートである。図7(a)はスリップフラグFsのタイムチャートを示す。図7(b)は運転者の要求トルクTdと指令トルクTcのタイムチャートを示す。図7(c)は駆動輪速度Vw_drive、従動輪速度Vw_driven、スリップ開始閾値Th_start、スリップ終了閾値Th_endのタイムチャートである。
時間t2において、駆動輪速度Vw_driveがスリップ開始閾値Th_start以上となり、指令トルクTc=Tc_slip(スリップ制御トルク)に設定される。比較例では、Tc_slipは車両制御装置23のスリップ制御トルク算出部23gにおいて、Vw_driveが目標駆動輪速度Vwt_driveとなるようにフィードバック制御を行っている。
時間t3において、Vw_driveはVwt_driveに収束する。
時間t4において、高μ路に入るとVw_driveは急速に低下し、Vw_drivenに接近する。
時間t5において、Vw_driveがスリップ終了閾値Th_end未満となると、Tc=Tdに設定される。
実施例1のタイムチャートでは、時間t11において運転者がアクセルペダルを操作し始め、要求トルクTdが増加する。指令トルクTc=Tdに設定されるため、TcはTdとともに増加する。Tcの増加に伴い、駆動輪速度Vw_driveが増加する。なお車両発進時には、まずVw_driveが発生し、遅れてVw_drivenが発生する。
時間t12において、Vw_driveがTh_start以上となり、指令トルクTc=Tc_slip(スリップ制御トルク)に設定される。実施例1では、Tc_slipは、モータ制御装置20のスリップ制御トルク算出部20aにおいて、モータ回転速度Vmが目標モータ回転速度Vmtとなるようにフィードバック制御を行っている。
時間t13において、Vw_driveは目標駆動輪速度Vwt_driveに収束する。
時間t14において、高μ路に入るとVw_driveは急速に低下し、Vw_drivenに接近する。
時間t15において、Vw_driveがスリップ終了閾値Th_end未満となると、Tc=Tdに設定される。
実施例1の効果を以下に列記する。
(1) 電動モータ2によって車輪を駆動する車両の制御装置であって、車両の従動輪速度Vw_drivenに基づいて車両の駆動輪(後輪RL,RR)の目標駆動輪速度Vwt_driveを算出する目標駆動輪速度算出部23dと、電動モータ2のモータ回転速度VmとVw_drivenの差に基づいて駆動輪のスリップ状態を検出するスリップ制御判断部23e(駆動輪スリップ状態検出部)と、算出されたVwt_driveに基づいて電動モータ2の目標モータ回転速度Vmtを算出する目標モータ回転速度算出部23fと、スリップ制御判断部23eにより駆動輪のスリップが検出されたときに、算出された目標モータ回転速度VmtとVmとに基づいて電動モータ2を駆動するスリップ制御トルクTc_slip(スリップ制御用指令トルク)を算出するスリップ制御トルク算出部20a(スリップ用指令トルク算出部)と、を備えた。
スリップ制御トルク算出部20aにおいて、目標モータ回転速度Vmtと、位相の早いモータ回転速度Vmとに基づいてスリップ制御トルクTc_slipを算出するようにしたため、駆動輪のスリップを早期に抑えることができる。
(2) スリップ制御トルク算出部20aは、電動モータ2の制御を行うモータ制御装置20(モータ制御部)に設けられている。
制御ループはモータ制御装置20、電動モータ2およびレゾルバ30によって構成されるため、情報通信における時間ロスを短縮化でき、駆動輪のスリップを早期に抑えることができる。
スリップ制御トルク算出部20aにおいて、目標モータ回転速度Vmtと、位相の早いモータ回転速度Vmとに基づいてスリップ制御トルクTc_slipを算出するようにしたため、駆動輪のスリップを早期に抑えることができる。
(4) スリップ制御トルク算出部20aは、電動モータ2の制御を行うモータ制御装置20に設けられ、目標駆動輪速度算出部23d、スリップ制御判断部23eおよび目標モータ回転速度算出部23fは、モータ制御装置20と車両の通信ラインで接続される車両制御装置23に設けられている。
制御ループはモータ制御装置20、電動モータ2およびレゾルバ30によって構成されるため、情報通信における時間ロスを短縮化でき、駆動輪のスリップを早期に抑えることができる。
スリップ制御トルク算出部20aにおいて、目標モータ回転速度Vmtと、位相の早いモータ回転速度Vmとに基づいてスリップ制御トルクTc_slipを算出するようにしたため、駆動輪のスリップを早期に抑えることができる。
(6) スリップ用指令トルク算出ステップ(ステップS22)は、電動モータ2の制御を制御するモータ制御装置20にて実施されるようにした。
制御ループはモータ制御装置20、電動モータ2およびレゾルバ30によって構成されるため、情報通信における時間ロスを短縮化でき、駆動輪のスリップを早期に抑えることができる。
以上、本発明を実施例1に基づいて説明してきたが、各発明の具体的な構成は実施例1に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。
実施例1では、車両の駆動源として電動モータ2のみを用いているが、エンジンも併用するハイブリッド車両に適用しても良い。また実施例1では後輪RL,RRが駆動輪となる後輪駆動車両に適用しているが、前輪FL,FRが駆動輪となる前輪駆動に車両に適用しても良い。
電動モータによって車輪を駆動する車両の制御装置であって、
前記車両の従動輪の車輪速度に基づいて前記車両の駆動輪の目標車輪速度を算出する目標駆動輪速度算出部と、
前記電動モータの回転速度と前記従動輪の車輪速度の差に基づいて前記駆動輪のスリップ状態を検出する駆動輪スリップ状態検出部と、
算出された前記目標駆動輪速度に基づいて前記電動モータの目標モータ回転速度を算出する目標モータ回転速度算出部と、
前記駆動輪スリップ状態検出部により駆動輪のスリップが検出されたときに、算出された前記目標モータ回転速度と前記電動モータの回転速度とに基づいて前記電動モータを駆動するスリップ制御用指令トルクを算出するスリップ用指令トルク算出部と、
を備えた。
スリップ用指令トルク算出部において、目標モータ回転速度と、位相の早い電動モータの回転速度とに基づいてスリップ制御用指令トルクを算出するようにしたため、駆動輪のスリップを早期に抑えることができる。
前記スリップ用指令トルク算出部は、前記電動モータの制御を行うモータ制御部に設けられている。
制御ループはモータ制御装置、電動モータによって構成されるため、情報通信における時間ロスを短縮化でき、駆動輪のスリップを早期に抑えることができる。
車両の駆動輪を駆動するトルクを発生する電動モータの回転速度を検出するモータ回転速度検出部と、
前記車両の従動輪の車輪速度を検出する従動輪速度検出部と、
前記車両の駆動輪の車輪速度を検出する駆動輪速度検出部と、
検出された前記従動輪の車輪速度と前記駆動輪の車輪速度とに基づいて、前記駆動輪の目標駆動輪速度を算出する目標駆動輪速度算出部と、
検出された前記電動モータの回転速度と検出された前記従動輪の車輪速度との差に基づいて前記駆動輪のスリップ状態を検出する駆動輪スリップ状態検出部と、
算出された前記目標駆動輪速度に基づいて前記電動モータの目標モータ回転速度を算出する目標モータ回転速度算出部と、
前記駆動輪スリップ状態検出部により前記駆動輪のスリップが検出されたときに、算出された前記目標モータ回転速度と検出された前記電動モータの回転速度とに基づいて前記電動モータを駆動するスリップ制御用指令トルクを算出するスリップ用指令トルク算出部と、
を備えた。
スリップ用指令トルク算出部において、目標モータ回転速度と、位相の早い電動モータの回転速度とに基づいてスリップ制御用指令トルクを算出するようにしたため、駆動輪のスリップを早期に抑えることができる。
前記スリップ用指令トルク算出部は、前記電動モータの制御を行うモータ制御装置に設けられ、
前記目標駆動輪速度算出部、前記駆動輪スリップ状態検出部および前記目標モータ回転数算出部は、前記モータ制御装置と前記車両の通信ラインで接続される車両制御装置に設けられている。
制御ループはモータ制御装置、モータ回転速度検出部および電動モータによって構成されるため、情報通信における時間ロスを短縮化でき、駆動輪のスリップを早期に抑えることができる。
前記車両の従動輪の車輪速度に基づいて前記車両の駆動輪の目標駆動輪速度を算出する目標駆動輪速度算出ステップと、
前記電動モータの回転速度と前記従動輪の車輪速度との差に基づいて前記駆動輪のスリップ状態を検出する駆動輪スリップ状態検出ステップと、
算出された前記目標駆動輪速度に基づいて前記電動モータの目標モータ回転速度を算出する目標モータ回転速度算出ステップと、
前記駆動輪スリップ状態検出ステップにて駆動輪のスリップが検出されたときに、算出された前記目標モータ回転速度と検出された電動モータ2の回転速度に基づいて前記電動モータを駆動するスリップ制御用指令トルクを算出するスリップ用指令トルク算出ステップと、
を備えた。
スリップ用指令トルク算出ステップにおいて、目標モータ回転速度と、位相の早い電動モータの回転速度とに基づいてスリップ制御用指令トルクを算出するようにしたため、駆動輪のスリップを早期に抑えることができる。
前記スリップ用指令トルク算出ステップは、前記電動モータの制御を制御するモータ制御装置にて実施される。
制御ループはモータ制御装置、電動モータによって構成されるため、情報通信における時間ロスを短縮化でき、駆動輪のスリップを早期に抑えることができる。
20 モータ制御装置(モータ制御部)
20a スリップ制御トルク算出部(スリップ用指令トルク算出部)
23d 目標駆動輪速度算出部
23e スリップ制御判断部(駆動輪スリップ状態検出部)
23f 目標モータ回転速度算出部
30 レゾルバ(モータ回転速度検出部)
31a,31b 車輪速度センサ(従動輪速度検出部)
31c,31d 車輪速度センサ(駆動輪速度検出部)
FL,FR 従動輪(前輪)
RL,RR駆動輪(後輪)
Claims (6)
- 電動モータによって車輪を駆動する車両の制御装置であって、
前記車両の従動輪速度に基づいて前記車両の駆動輪の目標駆動輪速度を算出する目標駆動輪速度算出部と、
前記電動モータのモータ回転速度と前記従動輪速度の差に基づいて前記駆動輪のスリップ状態を検出する駆動輪スリップ状態検出部と、
算出された前記目標駆動輪速度に基づいて前記電動モータの目標モータ回転速度を算出する目標モータ回転速度算出部と、
前記駆動輪スリップ状態検出部により駆動輪のスリップが検出されたときに、算出された前記目標モータ回転速度と前記モータ回転速度とに基づいて前記電動モータを駆動するスリップ制御用指令トルクを算出するスリップ用指令トルク算出部と、
を備えたことを特徴とする電動車両の制御装置。 - 請求項1に記載の電動車両の制御装置において、
前記スリップ用指令トルク算出部は、前記電動モータの制御を行うモータ制御部に設けられていることを特徴とする電動車両の制御装置。 - 車両の駆動輪を駆動するトルクを発生する電動モータのモータ回転速度を検出するモータ回転速度検出部と、
前記車両の従動輪速度を検出する従動輪速度検出部と、
前記車両の駆動輪速度を検出する駆動輪速度検出部と、
検出された前記従動輪速度と前記駆動輪速度とに基づいて、前記駆動輪の目標駆動輪速度を算出する目標駆動輪速度算出部と、
検出された前記モータ回転速度と検出された前記従動輪速度との差に基づいて前記駆動輪のスリップ状態を検出する駆動輪スリップ状態検出部と、
算出された前記目標駆動輪速度に基づいて前記電動モータの目標モータ回転速度を算出する目標モータ回転速度算出部と、
前記駆動輪スリップ状態検出部により前記駆動輪のスリップが検出されたときに、算出された前記目標モータ回転速度と検出された前記モータ回転速度とに基づいて前記電動モータを駆動するスリップ制御用指令トルクを算出するスリップ用指令トルク算出部と、
を備えたことを特徴とする電動車両の制御システム。 - 請求項3に記載の電動車両の制御システムにおいて、
前記スリップ用指令トルク算出部は、前記電動モータの制御を行うモータ制御装置に設けられ、
前記目標駆動輪速度算出部、前記駆動輪スリップ状態検出部および前記目標モータ回転数算出部は、前記モータ制御装置と前記車両の通信ラインで接続される車両制御装置に設けられていることを特徴とする電動車両の制御システム。 - 電動モータによって車輪を駆動する車両の制御方法であって、
前記車両の従動輪速度に基づいて前記車両の駆動輪の目標駆動輪速度を算出する目標駆動輪速度算出ステップと、
前記電動モータのモータ回転速度と前記従動輪速度との差に基づいて前記駆動輪のスリップ状態を検出する駆動輪スリップ状態検出ステップと、
算出された前記目標駆動輪速度に基づいて前記電動モータの目標モータ回転速度を算出する目標モータ回転速度算出ステップと、
前記駆動輪スリップ状態検出ステップにて駆動輪のスリップが検出されたときに、算出された前記目標モータ回転速度と検出されたモータ回転速度に基づいて前記電動モータを駆動するスリップ制御用指令トルクを算出するスリップ用指令トルク算出ステップと、
を備えたことを特徴とする電動車両の制御方法。 - 請求項5に記載の電動車両の制御装置において、
前記スリップ用指令トルク算出ステップは、前記電動モータの制御を行うモータ制御装置にて実施されることを特徴とする電動車両の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016040367A JP2017158337A (ja) | 2016-03-02 | 2016-03-02 | 電動車両の制御装置、電動車両の制御システムおよび電動車両の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016040367A JP2017158337A (ja) | 2016-03-02 | 2016-03-02 | 電動車両の制御装置、電動車両の制御システムおよび電動車両の制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017158337A true JP2017158337A (ja) | 2017-09-07 |
Family
ID=59810510
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016040367A Pending JP2017158337A (ja) | 2016-03-02 | 2016-03-02 | 電動車両の制御装置、電動車両の制御システムおよび電動車両の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017158337A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108995562A (zh) * | 2018-07-26 | 2018-12-14 | 孙玉萍 | 一种电动汽车多驱动轮集成控制系统及方法 |
| JP2021153363A (ja) * | 2020-03-24 | 2021-09-30 | 株式会社デンソー | 車両の制御装置 |
| JP2021164354A (ja) * | 2020-04-02 | 2021-10-11 | 株式会社デンソー | 車両のトラクション制御装置 |
| US11161418B2 (en) * | 2019-02-04 | 2021-11-02 | Toyota Jidosha Kabushiki Kaisha | Control device of electric vehicle |
| CN115958965A (zh) * | 2022-12-22 | 2023-04-14 | 重庆长安汽车股份有限公司 | 车辆的车轮防滑控制方法、装置、车辆及存储介质 |
| CN119078781A (zh) * | 2024-09-05 | 2024-12-06 | 联合汽车电子有限公司 | 一种车辆的控制方法以及系统 |
| JP2025022136A (ja) * | 2023-08-02 | 2025-02-14 | 本田技研工業株式会社 | 車両制御システム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012045996A (ja) * | 2010-08-25 | 2012-03-08 | Nissan Motor Co Ltd | ハイブリッド車両の発電制御装置 |
| JP2014091388A (ja) * | 2012-11-02 | 2014-05-19 | Hitachi Automotive Systems Ltd | 車両制御装置 |
| JP2015231771A (ja) * | 2014-06-09 | 2015-12-24 | 株式会社豊田中央研究所 | 駆動力制御装置及び自動車 |
| JP2016005328A (ja) * | 2014-06-16 | 2016-01-12 | 富士重工業株式会社 | 車両の制御装置及び車両の制御方法 |
-
2016
- 2016-03-02 JP JP2016040367A patent/JP2017158337A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012045996A (ja) * | 2010-08-25 | 2012-03-08 | Nissan Motor Co Ltd | ハイブリッド車両の発電制御装置 |
| JP2014091388A (ja) * | 2012-11-02 | 2014-05-19 | Hitachi Automotive Systems Ltd | 車両制御装置 |
| JP2015231771A (ja) * | 2014-06-09 | 2015-12-24 | 株式会社豊田中央研究所 | 駆動力制御装置及び自動車 |
| JP2016005328A (ja) * | 2014-06-16 | 2016-01-12 | 富士重工業株式会社 | 車両の制御装置及び車両の制御方法 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108995562A (zh) * | 2018-07-26 | 2018-12-14 | 孙玉萍 | 一种电动汽车多驱动轮集成控制系统及方法 |
| US11161418B2 (en) * | 2019-02-04 | 2021-11-02 | Toyota Jidosha Kabushiki Kaisha | Control device of electric vehicle |
| JP2021153363A (ja) * | 2020-03-24 | 2021-09-30 | 株式会社デンソー | 車両の制御装置 |
| JP7458220B2 (ja) | 2020-03-24 | 2024-03-29 | 株式会社デンソー | 車両の制御装置 |
| JP2021164354A (ja) * | 2020-04-02 | 2021-10-11 | 株式会社デンソー | 車両のトラクション制御装置 |
| JP7453833B2 (ja) | 2020-04-02 | 2024-03-21 | 株式会社デンソー | 車両のトラクション制御装置 |
| CN115958965A (zh) * | 2022-12-22 | 2023-04-14 | 重庆长安汽车股份有限公司 | 车辆的车轮防滑控制方法、装置、车辆及存储介质 |
| JP2025022136A (ja) * | 2023-08-02 | 2025-02-14 | 本田技研工業株式会社 | 車両制御システム |
| JP7770362B2 (ja) | 2023-08-02 | 2025-11-14 | 本田技研工業株式会社 | 車両制御システム |
| CN119078781A (zh) * | 2024-09-05 | 2024-12-06 | 联合汽车电子有限公司 | 一种车辆的控制方法以及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5804186B2 (ja) | 制動制御装置 | |
| JP2017158337A (ja) | 電動車両の制御装置、電動車両の制御システムおよび電動車両の制御方法 | |
| EP3050765B1 (en) | Control device for electric vehicle | |
| CN107848424B (zh) | 制动控制装置 | |
| JP6361916B2 (ja) | 車両制御装置および車両制御方法 | |
| US9931962B2 (en) | Control device for electric vehicle and control method for electric vehicle | |
| WO2013085000A1 (ja) | 電動車両の制御装置 | |
| JP6769279B2 (ja) | 電動車両の制動制御方法、及び電動車両の制御装置 | |
| WO2013084358A1 (ja) | 車両の制御装置 | |
| CN106458193B (zh) | 用于再生制动系统的控制装置和用于运行再生制动系统的方法 | |
| JP5982808B2 (ja) | 制動トルク制御装置及び制動トルク制御方法 | |
| JP5686721B2 (ja) | 電動車両の制御装置 | |
| JP5817329B2 (ja) | 車両の制御方法及び制御装置 | |
| US11097711B2 (en) | Traction control for a hybrid electric powertrain | |
| JP2017034930A (ja) | 電動車両 | |
| JP2014166845A (ja) | 電気自動車の車輪スリップ制御装置 | |
| JP2021030929A (ja) | 車両の制動制御装置 | |
| JP2021103917A (ja) | 制動制御装置 | |
| JP7339857B2 (ja) | 制動制御装置 | |
| CN115817450A (zh) | 车辆用控制装置以及车辆用控制方法 | |
| JP7510303B2 (ja) | 制御装置 | |
| US20250178447A1 (en) | Controller for electric vehicle | |
| JP6387675B2 (ja) | 車両のトラクション制御装置 | |
| JP2023144497A (ja) | モータ制御装置およびプログラム | |
| JP2017046380A (ja) | 車両の制御方法および車両用制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190829 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191126 |