JP2017158382A - 回転電機システムまたは回転電機システムの運転方法 - Google Patents
回転電機システムまたは回転電機システムの運転方法 Download PDFInfo
- Publication number
- JP2017158382A JP2017158382A JP2016041708A JP2016041708A JP2017158382A JP 2017158382 A JP2017158382 A JP 2017158382A JP 2016041708 A JP2016041708 A JP 2016041708A JP 2016041708 A JP2016041708 A JP 2016041708A JP 2017158382 A JP2017158382 A JP 2017158382A
- Authority
- JP
- Japan
- Prior art keywords
- electrical machine
- rotating electrical
- power
- machine system
- power converter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Landscapes
- Control Of Eletrric Generators (AREA)
Abstract
【解決手段】
回転電機システムは、第1の回転電機(15)と、第2の回転電機(16)と、第1の回転電機および第2の回転電機の少なくともいずれか一方の回転子における交流と直流を変換する第1の電力変換器(3)および第2の電力変換器(4)を備える回転電機システムであって、第1の回転電機及び第1の電力変換器の組と、第2の回転電機及び第2の電力変換器の組に無効電力指令を分配する制御装置(6)を備え、回転電機システムの運転効率を高める様に、無効電力指令の分配を補正する。
【選択図】図5
Description
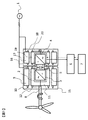
図1から図5は、本発明が適用される回転電機システムに実装される制御方式を示す図である。本発明に係る回転電機システムは、その固定子巻線(10,18)が電力系統(1)に電気的に接続され、その回転子にInsulated Gate Bipolar Transistor(IGBT)等の電力用半導体スイッチング素子と還流用整流素子であるダイオード素子が逆並列接続された半導体スイッチングユニットが複数ユニット直列接続および並列接続されることで構成される、一般に2レベル変換器や3レベル変換器等の交直電力変換器(3,4)が実装され、その交流端子が回転子巻線(12,20)に接続され、かつ、その直流端子に平滑コンデンサ(5)が接続される。

2 電力変換器
3 回転機側電力変換器もしくは主発電機側電力変換器
4 電力系統側電力変換器もしくは補助発電機側電力変換器
5 直流部平滑コンデンサ
6 電力変換器制御装置
7 風車制御装置
8 回転軸もしくはシャフト
9 回転機固定子鉄心もしくは主発電機固定子鉄心
10 回転機固定子巻線もしくは主発電機固定子巻線
11 回転機回転子鉄心もしくは主発電機回転子鉄心
12 回転機回転子巻線もしくは主発電機回転子巻線
13 ブラシ
14 スリップリング
15 回転電機もしくは主発電機(Gen)
16 補助発電機(Exc)
17 補助発電機固定子鉄心
18 補助発電機固定子巻線
19 補助発電機回転子鉄心
20 補助発電機回転子巻線
VGrid 系統電圧検出装置及び系統電圧検出値
IGrid 系統電流検出装置及び系統電流検出値
VGen 主発電機固定子電圧検出装置及び主発電機固定子電圧検出値
VExc 補助発電機固定子電圧検出装置及び補助発電機固定子電圧検出値
IsGen 主発電機固定子電流検出装置及び主発電機固定子電流検出値
IrGen 主発電機回転子電流検出装置及び主発電機回転子電流検出値
IrExc 補助発電機回転子電流検出装置及び補助発電機回転子電流検出値
Vdc 直流部平滑コンデンサ電圧検出装置及び電圧検出値
Encoder 回転数及び回転位相検出器及び検出値
LPF ローパスフィルタ
DFT 正相検出器
DC-AVR 直流電圧自動制御装置
AC-ACR 自動電流制御装置
AC-APR 自動有効電力制御装置
AC-AQR 自動無効電力制御装置
PWM PWMパルス生成装置
P 有効電力
Q 無効電力
*(上付き添え字) それぞれ対応する物理量の指令値
Claims (13)
- 第1の固定子巻線を有する第1の固定子と、第1の回転子巻線を有する第1の回転子を備える第1の回転電機と、
第2の固定子巻線を有する第2の固定子と、第2の回転子巻線を有する第2の回転子を備える第2の回転電機と、
前記第1の回転電機および前記第2の回転電機の少なくともいずれか一方の回転子における交流と直流を変換する第1の電力変換器および第2の電力変換器を備える回転電機システムであって、
前記第1の電力変換器及び前記第2の電力変換器の直流部が互いに接続され、
前記第1の電力変換器の交流部が前記第1の回転子巻線と電気的に接続され、
前記第2の電力変換器の交流部が前記第2の回転子巻線と電気的に接続され、
前記第1の固定子巻線及び前記第2の固定子巻線が各々交流電源に電気的に接続されており、
前記第1の回転電機及び前記第1の電力変換器の組と、前記第2の回転電機及び前記第2の電力変換器の組に無効電力指令を分配する制御装置を備え、
前記回転電機システムの運転効率を高める様に、前記無効電力指令の分配を補正することを特徴とする回転電機システム - 請求項1に記載の回転電機システムであって、
前記運転効率は、各前記回転子に入力される機械的入力エネルギーの推定値を用いて算出されることを特徴とする回転電機システム - 請求項2に記載の回転電機システムであって、
前記第1の固定子巻線と前記交流電源が電気的に接続される第1の電気経路と前記第2の固定子巻線と前記交流電源が電気的に接続される第2の電気経路は接続点で接続されており、
前記直流部の電圧を検出する第1の電圧検出器と、
前記第1の固定子巻線と前記接続点の間に流れる電流を検出する第1の電流検出器、前記第2の固定子巻線と前記接続点の間に流れる電流を検出する第2の電流検出器、または前記接続点と前記交流電源の間に流れる電流を検出する第3の電流検出器のうちで少なくとも2つと、
前記第1の回転電機および前記第2の回転電機の回転状態を検出する回転計と、
前記交流電源の電圧を検出する第2の電圧検出器と、
前記第1の回転子巻線に流れる電流を検出する第4の電流検出器と、
前記第2の回転子巻線に流れる電流を検出する第5の電流検出器を備えることを特徴とする記載の回転電機システム - 請求項3に記載の回転電機システムであって、
各前記電流検出器及び各前記電圧検出器から得た検出値と前記第1の回転電機および前記第2の回転電機の電気的特性を用いて、前記機械的入力エネルギーの推定を行うことを特徴とする回転電機システム - 請求項1ないし4のいずれか1項に記載の回転電機システムであって、
前記第1の固定子巻線と前記交流電源が電気的に接続される第1の電気経路と前記第2の固定子巻線と前記交流電源が電気的に接続される第2の電気経路は接続点で接続されており、
前記接続点よりも前記交流電源側の電力値を用いて有効電力を制御することを特徴とする回転電機システム - 請求項1ないし5のいずれか1項に記載の回転電機システムであって、
過去の運転効率及び前記過去の運転効率に対応する補正量を用いて、現状の補正値での運転効率の改善成否を判定し、前記無効電力指令の分配を補正することを特徴とする回転電機システム - 請求項1ないし6のいずれか1項に記載の回転電機システムであって、
前記無効電力指令の分配の補正は、前記無効電力指令値の総和を変更しないように行うことを特徴とする回転電機システム - 第1の固定子巻線を有する第1の固定子と、第1の回転子巻線を有する第1の回転子を備える第1の回転電機と、
第2の固定子巻線を有する第2の固定子と、第2の回転子巻線を有する第2の回転子を備える第2の回転電機と、
前記第1の回転電機および前記第2の回転電機の少なくともいずれか一方の回転子における交流と直流を変換する第1の電力変換器および第2の電力変換器を備え、
前記第1の電力変換器及び前記第2の電力変換器の直流部が互いに接続され、
前記第1の電力変換器の交流部が前記第1の回転子巻線と電気的に接続され、
前記第2の電力変換器の交流部が前記第2の回転子巻線と電気的に接続され、
前記第1の固定子巻線及び前記第2の固定子巻線が各々交流電源に電気的に接続される回転電機システムの運転方法であって、
前記第1の回転電機及び前記第1の電力変換器の組と、前記第2の回転電機及び前記第2の電力変換器の組に無効電力指令を分配し、
前記回転電機システムの運転効率を高める様に、前記無効電力指令の分配を補正することを特徴とする回転電機システムの運転方法 - 請求項8に記載の回転電機システムの運転方法であって、
前記運転効率を、各前記回転子に入力される機械的入力エネルギーの推定値を用いて算出することを特徴とする回転電機システムの運転方法 - 請求項9に記載の回転電機システムの運転方法であって、
各前記電流検出器及び各前記電圧検出器から得た検出値と前記第1の回転電機および前記第2の回転電機の電気的特性を用いて、前記機械的入力エネルギーの推定を行うことを特徴とする回転電機システムの運転方法 - 請求項8ないし10のいずれか1項に記載の回転電機システムの運転方法であって、
前記第1の固定子巻線と前記交流電源が電気的に接続される第1の電気経路と前記第2の固定子巻線と前記交流電源が電気的に接続される第2の電気経路は接続点で接続されており、
前記接続点よりも前記交流電源側の電力値を用いて有効電力を制御することを特徴とする回転電機システムの運転方法 - 請求項8ないし11のいずれか1項に記載の回転電機システムの運転方法であって、
過去の運転効率及び前記過去の運転効率に対応する補正量を用いて、現状の補正値での運転効率の改善成否を判定し、前記無効電力指令の分配を補正することを特徴とする回転電機システムの運転方法 - 請求項8ないし12のいずれか1項に記載の回転電機システムであって、
前記無効電力指令の分配の補正は、前記無効電力指令値の総和を変更しないように行うことを特徴とする回転電機システムの運転方法
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016041708A JP2017158382A (ja) | 2016-03-04 | 2016-03-04 | 回転電機システムまたは回転電機システムの運転方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016041708A JP2017158382A (ja) | 2016-03-04 | 2016-03-04 | 回転電機システムまたは回転電機システムの運転方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017158382A true JP2017158382A (ja) | 2017-09-07 |
Family
ID=59810809
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016041708A Ceased JP2017158382A (ja) | 2016-03-04 | 2016-03-04 | 回転電機システムまたは回転電機システムの運転方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017158382A (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003324847A (ja) * | 2002-05-09 | 2003-11-14 | Fuji Electric Co Ltd | 電圧フリッカ補償方法および装置 |
| JP2006211734A (ja) * | 2005-01-25 | 2006-08-10 | Denso Corp | トルク検出装置 |
| WO2009078073A1 (ja) * | 2007-12-14 | 2009-06-25 | Mitsubishi Heavy Industries, Ltd. | 風力発電システム及びその運転制御方法 |
| WO2014181454A1 (ja) * | 2013-05-10 | 2014-11-13 | 株式会社 日立製作所 | 回転電機システムまたは風力発電システム |
-
2016
- 2016-03-04 JP JP2016041708A patent/JP2017158382A/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003324847A (ja) * | 2002-05-09 | 2003-11-14 | Fuji Electric Co Ltd | 電圧フリッカ補償方法および装置 |
| JP2006211734A (ja) * | 2005-01-25 | 2006-08-10 | Denso Corp | トルク検出装置 |
| WO2009078073A1 (ja) * | 2007-12-14 | 2009-06-25 | Mitsubishi Heavy Industries, Ltd. | 風力発電システム及びその運転制御方法 |
| US20110112697A1 (en) * | 2007-12-14 | 2011-05-12 | Mitsubishi Heavy Industries, Ltd. | Wind turbine generator system and operation control method therefor |
| WO2014181454A1 (ja) * | 2013-05-10 | 2014-11-13 | 株式会社 日立製作所 | 回転電機システムまたは風力発電システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101521482B (zh) | 用于装配电机的方法和设备 | |
| CN114930711B (zh) | 用于为双馈风力涡轮发电机提供电网形成控制的系统和方法 | |
| US10491146B2 (en) | System and method for compensating for generator-induced flicker in a wind turbine | |
| JP2014087141A (ja) | 回転機およびそのドライブシステム | |
| Grigor’ev et al. | Improving the reliability of electric drives of exhausters of the oxygen-converter process | |
| US9793703B2 (en) | Protecting a permanent magnet generator | |
| Chaal et al. | Practical implementation of sensorless torque and reactive power control of doubly fed machines | |
| US10468881B2 (en) | Electrical power systems having zig-zag transformers | |
| TWI533592B (zh) | A rotating electrical system or a wind power generation system | |
| US11013070B2 (en) | System and method for controlling multiple IGBT temperatures in a power converter of an electrical power system | |
| JP2011217574A (ja) | 風力発電システム、回転機の制御装置および制御方法 | |
| CN103608993A (zh) | 受控于限制输出有功功率的规则、包括双馈电机和逆变器的传动链 | |
| JP3864309B2 (ja) | 風力発電システムおよび方法 | |
| JP7054653B2 (ja) | 電力変換システム | |
| CN104584360A (zh) | 用于检测电机的孤岛并且保护电机的系统和方法 | |
| JP2017158382A (ja) | 回転電機システムまたは回転電機システムの運転方法 | |
| CN115642634A (zh) | 用于减轻基于电网形成逆变器的资源中的闪变的电压控制回路 | |
| KR20110024148A (ko) | 이중 여자 권선형 동기 발전기 | |
| JPS6198200A (ja) | 可変速発電システムの励磁制御装置 | |
| WO2014073030A1 (ja) | 発電システム及び風力発電システム | |
| Cao et al. | New Adaptive Control Strategy for a Wind Turbine Permanent Magnet Synchronous Generator (PMSG). Inventions 2021, 6, 3 | |
| Kumar et al. | A Reliable Sensor Less Speed Estimation Technique for PMSG Under Distorted Grid Conditions | |
| Jovanović et al. | Sensorless Control of Doubly-Fed Reluctance Machines for Wind Energy Conversion Systems | |
| JP2017163660A (ja) | 風力発電システム | |
| Ghandehari et al. | A method for detecting the rotor electromagnetic flow of double fed induction generator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170111 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180822 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190515 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190528 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20190917 |