JP2017158403A - 車両 - Google Patents
車両 Download PDFInfo
- Publication number
- JP2017158403A JP2017158403A JP2016042509A JP2016042509A JP2017158403A JP 2017158403 A JP2017158403 A JP 2017158403A JP 2016042509 A JP2016042509 A JP 2016042509A JP 2016042509 A JP2016042509 A JP 2016042509A JP 2017158403 A JP2017158403 A JP 2017158403A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- torque
- target
- wheel
- drive motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2045—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for optimising the use of energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/02—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of clutch
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/04—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location or kind of gearing
- B60K17/043—Transmission unit disposed in on near the vehicle wheel, or between the differential gear unit and the wheel
- B60K17/046—Transmission unit disposed in on near the vehicle wheel, or between the differential gear unit and the wheel with planetary gearing having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/34—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles
- B60K17/356—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles having fluid or electric motor, for driving one or more wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K7/0007—Disposition of motor in, or adjacent to, traction wheel the motor being electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/007—Physical arrangements or structures of drive train converters specially adapted for the propulsion motors of electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/32—Control or regulation of multiple-unit electrically-propelled vehicles
- B60L15/34—Control or regulation of multiple-unit electrically-propelled vehicles with human control of a setting device
- B60L15/36—Control or regulation of multiple-unit electrically-propelled vehicles with human control of a setting device with automatic control superimposed, e.g. to prevent excessive motor current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/51—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by AC-motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/188—Controlling power parameters of the driveline, e.g. determining the required power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D3/00—Steering gears
- B62D3/02—Steering gears mechanical
- B62D3/12—Steering gears mechanical of rack-and-pinion type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K2007/0046—Disposition of motor in, or adjacent to, traction wheel the motor moving together with the vehicle body, i.e. moving independently from the wheel axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K2007/0092—Disposition of motor in, or adjacent to, traction wheel the motor axle being coaxial to the wheel axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/40—DC to AC converters
- B60L2210/44—Current source inverters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/42—Electrical machine applications with use of more than one motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/44—Wheel Hub motors, i.e. integrated in the wheel hub
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/46—Wheel motors, i.e. motor connected to only one wheel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/52—Drive Train control parameters related to converters
- B60L2240/529—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/28—Four wheel or all wheel drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/40—Torque distribution
- B60W2720/403—Torque distribution between front and rear axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/84—Data processing systems or methods, management, administration
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Arrangement And Driving Of Transmission Devices (AREA)
- Retarders (AREA)
Abstract
【課題】車輪を駆動する動力系の総合効率を向上できる車両を提供する。【解決手段】車両1は、第1モータ特性の前輪駆動モータ15と減速機16とにより駆動される前輪3と、第2モータ特性の後輪駆動モータ18により駆動される後輪4とを含む。前輪駆動モータ15および後輪駆動モータ18は、ECU7によって制御される。ECU7は、全車輪の総合目標車輪トルクを演算し、総合目標車輪トルク、第1モータ特性、第2モータ特性および減速機の特性に基づいて、前輪3および後輪4の各目標車輪トルクを演算する。ECU7は、減速機16の減速比と前輪3の目標車輪トルクとを用いて、前輪駆動モータ15の目標モータトルクを演算し、後輪4の目標車輪トルクに基づいて、後輪駆動モータ18の目標モータトルクを演算する。ECU7は、各目標モータトルクに基づいて前輪駆動モータ15および後輪駆動モータ18を駆動制御する。【選択図】図1
Description
本発明は、モータにより車輪を駆動させる車両に関する。
特許文献1には、前輪および後輪を含む車輪と、前輪に直接連結された前輪モータと、後輪に直接連結された後輪モータとを含む車両が開示されている。この車両は、全モータの総合効率が最大となるように、前輪モータおよび後輪モータに対するトルク分配比を演算し、得られたトルク分配比に基づいて、前輪モータおよび後輪モータを駆動制御している。
特許文献1の車両は、前輪モータが直接前輪に連結され、後輪モータが直接後輪に連結された所謂ダイレクトドライブ方式が採用された構成とされている。このため、前輪モータおよび後輪モータに対して車両の実際の走行速度に応じた回転数およびトルクが要求されるから、回転数特性およびトルク特性が同程度とされた前輪モータと後輪モータとが使用される。
回転数特性およびトルク特性が同程度とされた前輪モータと後輪モータとでは、回転数とトルクとによって定まる効率領域も同様になるため、前輪モータの高効率領域と後輪モータの高効率領域とが比較的近くに位置することとなる。そのため、動力系の総合効率が高くなる走行条件が狭い範囲に限られており、車輪を駆動する動力系の総合効率を良好に向上することができないという課題がある。
そこで、本発明は、車輪を駆動する動力系の総合効率を向上できる車両を提供することを目的とする。
請求項1に記載の発明は、左右一対の第1車輪(3,4)および左右一対の第2車輪(4,3)と、各前記第1車輪を回転駆動させ、第1モータ特性を有する第1モータ(15)と、各前記第2車輪を回転駆動させ、前記第1モータ特性とは異なる第2モータ特性を有する第2モータ(18)と、前記第1モータのトルクを増幅させて前記第1車輪に伝達させる減速機(16)と、全車輪の総合車輪トルク(Tiwm)の目標値である総合目標車輪トルク(Tiwm *)を演算する総合目標車輪トルク演算手段(7)と、前記第1モータ特性、前記第2モータ特性および前記減速機の特性に基づいて、前記第1車輪に要求される車輪トルク(Tiwm1,Tiwm2)の目標値である第1目標車輪トルク(Tiwm1 *,Tiwm2 *)と、前記第2車輪に要求される車輪トルク(Tiwm2,Tiwm1)の目標値である第2目標車輪トルク(Tiwm2 *,Tiwm1 *)とを演算する目標車輪トルク演算手段(7)と、前記減速機の減速比(i)と前記第1目標車輪トルクとを用いて、前記第1モータのモータトルク(Tm1,Tm2)の目標値である第1目標モータトルク(Tm1 *,Tm2 *)を演算する第1目標モータトルク演算手段(7)と、前記第2目標車輪トルクに基づいて、前記第2モータのモータトルク(Tm2,Tm1)の目標値である第2目標モータトルク(Tm2 *,Tm1 *)を演算する第2目標モータトルク演算手段(7)と、前記第1目標モータトルクに基づいて前記第1モータを駆動制御し、前記第2目標モータトルクに基づいて前記第2モータを駆動制御するモータ駆動制御手段(7)とを含む、車両(1)である。なお、括弧内の英数字は、後述の実施形態における対応構成要素等を表すが、特許請求の範囲を実施形態に限定する趣旨ではない。以下、この項において同じ。
請求項2に記載の発明は、前記第1目標モータトルク演算手段は、前記減速機の減速比および前記減速機の正効率の積である前記減速機のトルク増幅率と、前記第1目標車輪トルクとに基づいて前記第1目標モータトルクを演算する、請求項1に記載の車両である。
請求項3に記載の発明は、前記第2モータは、前記第1モータと比較して低回転数かつ高トルクとされた低回転数高トルク型のモータである、請求項1または2に記載の車両である。
請求項3に記載の発明は、前記第2モータは、前記第1モータと比較して低回転数かつ高トルクとされた低回転数高トルク型のモータである、請求項1または2に記載の車両である。
請求項4に記載の発明は、前記第1車輪は、第1車軸を含み、前記第2車輪は、第2車軸を含み、前記第1モータは、前記減速機を介して前記第1車輪の前記第1車軸に連結された第1モータシャフトを含み、前記第2モータは、前記第2車輪の前記第2車軸に連結された第2モータシャフトを含み、前記第2モータの前記第2モータシャフトの径が、前記第1モータの前記第1モータシャフトの径よりも大きくされている、請求項1〜3のいずれか一項に記載の車両である。
請求項5に記載の発明は、前記減速機は、前記第1モータによって回転駆動されるサンギアと、前記サンギアの周囲に配置されたリングギアと、前記サンギアと前記リングギアとの間に配置された遊星ギアと、前記遊星ギアを支持しかつ前記第1車輪に連結されたキャリアとを含む遊星歯車機構である、請求項1〜4のいずれか一項に記載の車両である。
本発明の車両では、第2モータが第1モータの第1モータ特性と異なる第2モータ特性を有している。しかも、第1モータが減速機を介して第1車輪を駆動させる構成とされている一方で、第2モータが減速機を介さずに第2車輪を直接駆動させる構成とされている。このため、第1モータ特性と第2モータ特性との間に差を設け易くされている。したがって、第1車輪および第2車輪の両方をモータのみによって直接駆動させる場合に比べ、広い回転数域および広いトルク域で、動力系における総合効率を高くするトルク分配を行うことが可能となる。よって、様々な走行条件において、車輪を駆動する動力系の総合効率を高くすることができる。
特に、本発明の車両では、第1モータが、減速機の減速比と第1目標車輪トルクとを用いて演算された第1目標モータトルクと等しくなるように駆動制御される。つまり、第1車輪は、減速機の減速比が考慮された第1モータトルクによって駆動される。これにより、第1車輪に要求されるトルク不足を解消できるから、車輪を駆動する動力系の総合効率を効果的に高めることができる。その一方で、第2モータは、第2モータトルクが第2目標車輪トルクに基づいて演算された第2目標モータトルクと等しくなるように駆動制御されるから、過不足のない適切なトルクで第2車輪を駆動させることができる。
以下では、本発明の実施形態を、添付図面を参照して詳細に説明する。
図1は、本発明の一実施形態に係る車両1の駆動系を図解的に示す平面図である。
図1を参照して、車両1は、四輪駆動式の車両であり、転舵機構2と、一対の前輪3と、一対の後輪4と、インバータ5と、バッテリ6と、ECU(Electronic Control Unit:電子制御ユニット)7とを備えている。
図1は、本発明の一実施形態に係る車両1の駆動系を図解的に示す平面図である。
図1を参照して、車両1は、四輪駆動式の車両であり、転舵機構2と、一対の前輪3と、一対の後輪4と、インバータ5と、バッテリ6と、ECU(Electronic Control Unit:電子制御ユニット)7とを備えている。
転舵機構2は、ステアリングホイール8と、ステアリングシャフト9と、ラックシャフト10と、ラックアンドピニオン機構11と、2個のタイロッド12を含む。ステアリングシャフト9は、ステアリングホイール8の操舵に応じて回転する。転舵機構2では、ステアリングシャフト9の回転が、ラックアンドピニオン機構11によりラックシャフト10の往復動に変換される。タイロッド12に一対の前輪3が連結されており、これによって前輪3の転舵角が変化し、前輪3が転舵される構成とされている。
一対の前輪3には、右前輪3FRと左前輪3FLとが含まれる。一対の後輪4には、右後輪4RRと左後輪4RLとが含まれる。前輪3および後輪4は、いずれもホイール13とタイヤ14とを含む。
以下では、右前輪3FR側の構成および左前輪3FL側の構成は略同様であるので、右前輪3FR側の構成を例に取って説明すると共に、左前輪3FL側の構成については右前輪3FR側の構成と同一の参照符号を付して説明を省略する。同様に、以下では、右後輪4RR側の構成および左後輪4RL側の構成は略同様であるので、右後輪4RR側の構成を例に取って説明すると共に、左後輪4RL側の構成については右後輪4RR側の構成と同一の参照符号を付して説明を省略する。
以下では、右前輪3FR側の構成および左前輪3FL側の構成は略同様であるので、右前輪3FR側の構成を例に取って説明すると共に、左前輪3FL側の構成については右前輪3FR側の構成と同一の参照符号を付して説明を省略する。同様に、以下では、右後輪4RR側の構成および左後輪4RL側の構成は略同様であるので、右後輪4RR側の構成を例に取って説明すると共に、左後輪4RL側の構成については右後輪4RR側の構成と同一の参照符号を付して説明を省略する。
右前輪3FRは、前輪駆動モータ15(第1モータ)および減速機16により回転駆動される。前輪駆動モータ15は、右前輪3FRのホイール13内に組み込まれたインホイール型の三相交流電動機(電動モータ)である。減速機16は、前輪駆動モータ15と共に右前輪3FRのホイール13内に組み込まれており、前輪駆動モータ15の回転数を減少させ、かつ、前輪駆動モータ15のトルクを増幅させて右前輪3FRに伝達させる。
右前輪3FRと減速機16との間には、クラッチ17が設けられている。クラッチ17は、締結されることにより、右前輪3FRへの前輪駆動モータ15の回転駆動力の伝達を許可する締結状態と、締結状態から開放されて、右前輪3FRへの前輪駆動モータ15の回転駆動力の伝達を禁止する開放状態との間で切り替え可能に設けられている。クラッチ17は、たとえば常時締結状態とされた電磁クラッチである。
右後輪4RRは、後輪駆動モータ18(第2モータ)により回転駆動される。後輪駆動モータ18は、右後輪4RRのホイール13内に組み込まれたインホイール型の三相交流電動機(電動モータ)である。右後輪4RRは、後輪駆動モータ18によって直接回転駆動される、いわゆるダイレクトドライブ方式が採用された構成とされている。したがって、右後輪4RRは、後輪駆動モータ18の回転数およびトルクと略等しい回転数およびトルクで駆動される。
インバータ5は、たとえば三相インバータ回路から構成されており、ECU7によって制御される。インバータ5は、前輪駆動モータ15および後輪駆動モータ18に対する電力の供給態様を個別に変更可能に構成されている。
インバータ5は、バッテリ6から供給される直流電力を交流電力に変換して前輪駆動モータ15に供給する。これにより、前輪駆動モータ15が駆動される。クラッチ17の締結状態では、減速機16により前輪駆動モータ15の回転数が減少され、かつ前輪駆動モータ15のトルクが増幅されて右前輪3FRに伝達される。これにより、右前輪3FRが回転駆動される。一方、クラッチ17の開放状態では、前輪駆動モータ15の回転駆動力が右前輪3FRに伝達されないので、右前輪3FRは前輪駆動モータ15によって回転駆動されない。
インバータ5は、バッテリ6から供給される直流電力を交流電力に変換して前輪駆動モータ15に供給する。これにより、前輪駆動モータ15が駆動される。クラッチ17の締結状態では、減速機16により前輪駆動モータ15の回転数が減少され、かつ前輪駆動モータ15のトルクが増幅されて右前輪3FRに伝達される。これにより、右前輪3FRが回転駆動される。一方、クラッチ17の開放状態では、前輪駆動モータ15の回転駆動力が右前輪3FRに伝達されないので、右前輪3FRは前輪駆動モータ15によって回転駆動されない。
同様に、インバータ5は、バッテリ6から供給される直流電力を交流電力に変換して後輪駆動モータ18に供給する。これにより、後輪駆動モータ18が駆動されて、右後輪4RRが回転駆動される。
車両1には、さらに、アクセルペダル(図示せず)の踏み込み量を検出するアクセルセンサ19と、ブレーキペダル(図示せず)の踏み込み量を検出するブレーキセンサ20と、当該車両1の車速Vを検出する車速センサ21とが搭載されている。アクセルセンサ19は、アクセルペダル(図示せず)の踏み込み量をアクセル開度信号Accとして出力する。ブレーキセンサ20は、ブレーキペダル(図示せず)の踏み込み量をブレーキ信号Brkとして出力する。車速センサ21は、車両1の現在の車速Vを車速信号として出力する。
車両1には、さらに、アクセルペダル(図示せず)の踏み込み量を検出するアクセルセンサ19と、ブレーキペダル(図示せず)の踏み込み量を検出するブレーキセンサ20と、当該車両1の車速Vを検出する車速センサ21とが搭載されている。アクセルセンサ19は、アクセルペダル(図示せず)の踏み込み量をアクセル開度信号Accとして出力する。ブレーキセンサ20は、ブレーキペダル(図示せず)の踏み込み量をブレーキ信号Brkとして出力する。車速センサ21は、車両1の現在の車速Vを車速信号として出力する。
ECU7は、たとえばCPUおよびメモリ(ROM,RAM,不揮発性メモリ等)を備えたマイクロコンピュータから構成されており、所定のプログラムを実行することにより、複数の機能処理部として機能するようになっている。ECU7には、その制御対象として、インバータ5、クラッチ17、アクセルセンサ19、ブレーキセンサ20、車速センサ21等が接続されている。
アクセルセンサ19、ブレーキセンサ20および車速センサ21によって検出された信号は、ECU7に入力される。前輪駆動モータ15、後輪駆動モータ18、インバータ5およびクラッチ17は、各センサによって検出された信号等に基づいて制御される。なお、ECU7は、インバータ5を介して、前輪駆動モータ15の回転数およびトルクと、後輪駆動モータ18の回転数およびトルクとを可変制御可能な構成とされている。
次に、図2を参照して、右前輪3FRの具体的な構成について説明する。図2は、図1に示される右前輪3FRを図解的に示す断面図である。以下では、車両1の内側の方向を「車内側」といい、車両1の外側の方向を「車外側」という。
右前輪3FRは、前述のホイール13とタイヤ14とを含む。右前輪3FRのホイール13は、タイヤ14が取り付けられた第1リム25と、第1リム25と一体を成し、その径方向中央部に前輪側車軸26が一体的に設けられた第1ディスク27とを含む。このホイール13内には、右前輪3FRを支持するための車輪支持体28が配置されている。
右前輪3FRは、前述のホイール13とタイヤ14とを含む。右前輪3FRのホイール13は、タイヤ14が取り付けられた第1リム25と、第1リム25と一体を成し、その径方向中央部に前輪側車軸26が一体的に設けられた第1ディスク27とを含む。このホイール13内には、右前輪3FRを支持するための車輪支持体28が配置されている。
車輪支持体28は、たとえば懸架装置(図示せず)を介して車体(図示せず)に回転不能に支持されている。車輪支持体28は、ホイール13内に配置されかつ前輪側車軸26を中心軸とする円筒状の筒部29と、筒部29の車外側開口をほぼ閉鎖するように形成されかつ車軸挿通孔30を有する環状部31とを含む。環状部31における車軸挿通孔30の周縁部には、車外側に向かって突出した円筒状の突出部32が設けられている。この突出部32内には、前輪側車軸26が配置されている。この突出部32の内周面と前輪側車軸26との間に軸受33が配置されている。右前輪3FRは、軸受33を介して車輪支持体28に回転自在に支持されている。
前述の前輪駆動モータ15および減速機16は、車輪支持体28(ホイール13)内に配置されている。前輪駆動モータ15は、筒部29の内周面に固定された第1ステータ34と、第1ステータ34の径方向内側に配置された第1ロータ35と、第1ロータ35に固定された第1モータシャフト36とを含む。つまり、前輪駆動モータ15は、インナーロータ型のモータである。第1ステータ34は、前輪駆動モータ15のU相、V相およびW相に対応するU相巻線、V相巻線およびW相巻線を含むステータ巻線を有している。
減速機16は、サンギア40と、リングギア41と、遊星ギア42と、キャリア43とを含む遊星歯車機構44である。サンギア40は、第1モータシャフト36の車外側の端部に連結されており、前輪駆動モータ15によって回転駆動される。リングギア41は、サンギア40の周囲を取り囲む筒状を成しており、サンギア40に対して回転不能に設けられている。リングギア41は、車輪支持体28に固定されていてもよい。
遊星ギア42は、サンギア40およびリングギア41に係合するように、サンギア40とリングギア41との間に配置されている。遊星ギア42は、サンギア40の周囲を自転しながら公転する。キャリア43は、複数の遊星ギア42を支持しており、遊星ギア42の公転に応じて回転するキャリア軸45を含む。キャリア43は、キャリア軸45に接続された前述のクラッチ17を介して前輪側車軸26に連結されている。減速機16の減速比iは、サンギア40の歯数Zsおよびリングギア41の歯数Zrを用いて、下記関係式(1)により表される。
i=(Zr/Zs)+1…(1)
ここで、前輪3一つ当たり(図2の例では右前輪3FR)のトルクおよび回転数と、前輪駆動モータ15のトルクおよび回転数との関係について説明する。前輪3一つ当たりのトルクを第1車輪トルクTiwm1、前輪3一つ当たりの回転数を第1車輪回転数Niwm1と定義する。また、前輪駆動モータ15のトルクを第1モータトルクTm1、前輪駆動モータ15の回転数を第1モータ回転数Nm1と定義する。
ここで、前輪3一つ当たり(図2の例では右前輪3FR)のトルクおよび回転数と、前輪駆動モータ15のトルクおよび回転数との関係について説明する。前輪3一つ当たりのトルクを第1車輪トルクTiwm1、前輪3一つ当たりの回転数を第1車輪回転数Niwm1と定義する。また、前輪駆動モータ15のトルクを第1モータトルクTm1、前輪駆動モータ15の回転数を第1モータ回転数Nm1と定義する。
前輪3一つ当たりの第1車輪トルクTiwm1、前輪3一つ当たりの第1車輪回転数Niwm1、前輪駆動モータ15の第1モータトルクTm1、前輪駆動モータ15の第1モータ回転数Nm1は、減速機16の減速比iを用いて、下記関係式(2)および(3)により表される。なお、回転数の単位は「rpm」であり、トルクの単位は「N・m」である。
Tiwm1=i×Tm1…(2)
Niwm1=Nm1/i…(3)
クラッチ17の締結状態で前輪駆動モータ15が回転駆動されると、前輪駆動モータ15の第1モータ回転数Nm1が減速機16によって減少され、かつ、前輪駆動モータ15の第1モータトルクTm1が、減速機16によって増幅されて前輪側車軸26に伝達される。このようにして、前輪3が、第1車輪トルクTiwm1(=i×Tm1)および第1車輪回転数Niwm1(=Nm1/i)で回転駆動される。一方、クラッチ17の開放状態で前輪駆動モータ15が回転駆動された場合には、前輪駆動モータ15の回転駆動力は前輪側車軸26に伝達されないので、前輪3は前輪駆動モータ15によっては回転駆動されない。
Niwm1=Nm1/i…(3)
クラッチ17の締結状態で前輪駆動モータ15が回転駆動されると、前輪駆動モータ15の第1モータ回転数Nm1が減速機16によって減少され、かつ、前輪駆動モータ15の第1モータトルクTm1が、減速機16によって増幅されて前輪側車軸26に伝達される。このようにして、前輪3が、第1車輪トルクTiwm1(=i×Tm1)および第1車輪回転数Niwm1(=Nm1/i)で回転駆動される。一方、クラッチ17の開放状態で前輪駆動モータ15が回転駆動された場合には、前輪駆動モータ15の回転駆動力は前輪側車軸26に伝達されないので、前輪3は前輪駆動モータ15によっては回転駆動されない。
上記関係式(2)および(3)を参照して、たとえば、減速機16の減速比iが「10」である場合、前輪3一つ当たりの第1車輪トルクTiwm1のトルク域は、前輪駆動モータ15の第1モータトルクTm1のトルク域の10倍となり、前輪3一つ当たりの第1車輪回転数Niwm1の回転数域は、前輪駆動モータ15の第1モータ回転数Nm1の回転数域の10分の1となる。
次に、図3を参照して、右後輪4RRの具体的な構成について説明する。図3は、図1に示される右後輪4RRを図解的に示す断面図である。
右後輪4RRは、前述のホイール13とタイヤ14とを含む。右後輪4RRのホイール13は、タイヤ14が取り付けられた第2リム50と、第2リム50と一体を成し、その径方向中央部に後輪側車軸51が一体的に設けられた第2ディスク52とを含む。
右後輪4RRは、前述のホイール13とタイヤ14とを含む。右後輪4RRのホイール13は、タイヤ14が取り付けられた第2リム50と、第2リム50と一体を成し、その径方向中央部に後輪側車軸51が一体的に設けられた第2ディスク52とを含む。
前述の後輪駆動モータ18は、ホイール13内に配置されている。後輪駆動モータ18は、後輪側車軸51に対して回転不能に軸受53を介して当該後輪側車軸51に連結された第2ステータ54と、第2ステータ54の径方向外側に配置された第2ロータ55と、第2ロータ55を支持するロータケース56と、ロータケース56を介して第2ロータ55に連結された第2モータシャフト57とを含む。つまり、後輪駆動モータ18は、アウターロータ型のモータである。
なお、本実施形態では、第2モータシャフト57が後輪側車軸51と一体を成している例を示しているが、後輪側車軸51とは別体とされた第2モータシャフト57が、当該後輪側車軸51に連結されていてもよい。第2ステータ54は、たとえば懸架装置(図示せず)を介して車体(図示せず)に回転不能に支持されており、後輪駆動モータ18のU相、V相およびW相に対応するU相巻線、V相巻線およびW相巻線を含むステータ巻線を有している。
後輪駆動モータ18側の第2モータシャフト57の径φ1は、前輪駆動モータ15側の第1モータシャフト36の径φ2よりも大きくされている。後輪駆動モータ18は、後述するように前輪駆動モータ15と比べて高トルク型のモータとされる。そのため、高トルク型の後輪駆動モータ18に連結された第2モータシャフト57(後輪側車軸51)に加わる応力が、低トルク型の前輪駆動モータ15に連結された第1モータシャフト36に加わる応力よりも大きくなる。そこで、本実施形態では、後輪駆動モータ18側の第2モータシャフト57の径φ1を、前輪駆動モータ15側の第1モータシャフト36の径φ2よりも大きくすることによって、第2モータシャフト57の強度を高めている。これにより、後輪駆動モータ18から右後輪4RRに回転駆動力を良好に伝達させることが可能となる。
ここで、後輪4一つ当たり(図3の例では右後輪4RR)のトルクを第2車輪トルクTiwm2、後輪4一つ当たりの回転数を第2車輪回転数Niwm2、後輪駆動モータ18のトルクを第2モータトルクTm2、後輪駆動モータ18の回転数を第2モータ回転数Nm2と定義する。後輪4一つ当たりの第2車輪トルクTiwm2、後輪4一つ当たりの第2車輪回転数Niwm2、後輪駆動モータ18の第2モータトルクTm2、後輪駆動モータ18の第2モータ回転数Nm2は、下記関係式(4)および(5)により表される。なお、回転数の単位は「rpm」であり、トルクの単位は「N・m」である。
Tiwm2=Tm2…(4)
Niwm2=Nm2…(5)
上記関係式(4)および(5)を参照して、後輪駆動モータ18が回転駆動されると、後輪駆動モータ18の第2モータ回転数Nm2および第2モータトルクTm2がそのまま後輪側車軸51に伝達される。これにより、右後輪4RRは、後輪駆動モータ18の第2車輪回転数Niwm2および第2モータトルクTm2に略等しい第2車輪回転数Niwm2(=Nm2)および第2車輪トルクTiwm2(=Tm2)で回転駆動される。
Niwm2=Nm2…(5)
上記関係式(4)および(5)を参照して、後輪駆動モータ18が回転駆動されると、後輪駆動モータ18の第2モータ回転数Nm2および第2モータトルクTm2がそのまま後輪側車軸51に伝達される。これにより、右後輪4RRは、後輪駆動モータ18の第2車輪回転数Niwm2および第2モータトルクTm2に略等しい第2車輪回転数Niwm2(=Nm2)および第2車輪トルクTiwm2(=Tm2)で回転駆動される。
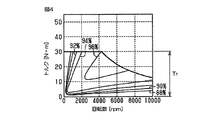
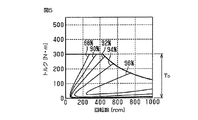
図4は、図1に示される前輪駆動モータ15の第1モータ特性を示すマップである。図5は、図1に示される後輪駆動モータ18の第2モータ特性を示すマップである。本実施形態では、前輪3の回転数および後輪4の回転数が共に「1000rpm」である場合に、車両1が最高速度となると定義して、以下説明する。
図4を参照して、前輪駆動モータ15の第1モータ特性とは、具体的には、前輪駆動モータ15の単体効率である。図5を参照して、後輪駆動モータ18の第2モータ特性とは、具体的には、後輪駆動モータ18の単体効率である。
図4を参照して、前輪駆動モータ15の第1モータ特性とは、具体的には、前輪駆動モータ15の単体効率である。図5を参照して、後輪駆動モータ18の第2モータ特性とは、具体的には、後輪駆動モータ18の単体効率である。
図4および図5を参照して、前輪駆動モータ15は、後輪駆動モータ18に対して高回転低トルク型のモータとされている一方、後輪駆動モータ18は、前輪駆動モータ15に対して低回転高トルク型のモータとされている。つまり、前輪駆動モータ15は、後輪駆動モータ18に比べて鉄損による損失が大きく、銅損による損失が小さいモータであり、後輪駆動モータ18は、前輪駆動モータ15に比べて鉄損による損失が小さく、銅損による損失が大きいモータである。
なお、前輪駆動モータ15が「高回転低トルク型のモータ」であるとは、前輪駆動モータ15の無負荷回転数が、後輪駆動モータ18の無負荷回転数よりも高く、前輪駆動モータ15の最大トルクTfが後輪駆動モータ18の最大トルクTbよりも低いことを意味している。また、後輪駆動モータ18が「低回転高トルク型のモータ」であるとは、後輪駆動モータ18の無負荷回転数が前輪駆動モータ15の無負荷回転数よりも低く、後輪駆動モータ18の最大トルクTbが前輪駆動モータ15の最大トルクTfよりも高いことを意味している。
図4を参照して、前輪駆動モータ15は、高回転数域(たとえば7000rpm〜10000rpmの範囲)かつ低トルク域(たとえば0N・m〜10N・mの範囲)において損失が大きい。また、前輪駆動モータ15は、低回転数域(たとえば1500rpm〜5000rpmの範囲)かつ高トルク域(たとえば20N・m〜30N・mの範囲)において損失が小さい。つまり、前輪駆動モータ15の第1モータ特性は、低回転数域かつ高トルク域に高効率領域を有している。なお、図4において、効率が88%以下となる領域では、実際には、効率が低下する方向に大きく変化している。
図5を参照して、後輪駆動モータ18は、低回転数域(たとえば0rpm〜500rpmの範囲)かつ高トルク域(たとえば150N・m〜300N・mの範囲)において損失が大きい。また、後輪駆動モータ18は、高回転数域(たとえば500rpm〜1000rpmの範囲)かつ低トルク域(たとえば、50N・m〜150N・mの範囲)において損失が小さい。つまり、後輪駆動モータ18の第2モータ特性は、高回転数域かつ低トルク域に高効率領域を有している。なお、図5において、効率が88%以下となる領域では、実際には、効率が低下する方向に大きく変化している。
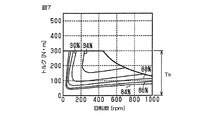
次に、図6および図7を参照して、減速機16の特性について説明する。図6は、図1に示される減速機16の特性を示すマップである。図7は、前輪駆動モータ15および減速機16の合算特性(以下、単に「減速後の前輪駆動モータ15の特性」という。)を示すマップである。図6において、横軸は減速機16から出力される減速後の回転数であり、縦軸は減速機16から出力される減速後のトルクである。
図6を参照して、減速機16の特性とは、具体的には、減速機16の単体効率である。図7を参照して、減速後の前輪駆動モータ15の特性とは、具体的には、前輪駆動モータ15の第1モータ特性(図4参照)と、減速機16の特性(図6参照)とを乗じることによって求められたものである。
図6を参照して、減速機16の特性は、回転数に増減よっては大きく変動せず、トルクの増減によって大きく変動する。減速機16では、一定の引きずりトルクが発生するため、減速機16に入力される入力トルクに対する引きずりトルクの割合は、低トルクになるほど増加する。そのため、減速機16の特性は、低トルク域(たとえば200N・m未満の範囲)に低効率領域を有しており、高トルク域(たとえば200N・m以上の範囲)に高効率領域を有している。
図6を参照して、減速機16の特性は、回転数に増減よっては大きく変動せず、トルクの増減によって大きく変動する。減速機16では、一定の引きずりトルクが発生するため、減速機16に入力される入力トルクに対する引きずりトルクの割合は、低トルクになるほど増加する。そのため、減速機16の特性は、低トルク域(たとえば200N・m未満の範囲)に低効率領域を有しており、高トルク域(たとえば200N・m以上の範囲)に高効率領域を有している。
図7を参照して、減速後の前輪駆動モータ15の特性は、本実施形態では、減速機16の減速比iが「10」に設定されているため、前輪駆動モータ15の単体特性に対して回転数域が10分の1となり、トルク域が10倍となっている。
本実施形態では、前輪駆動モータ15の最大トルクTf(=30N・m)が、後輪駆動モータ18の最大トルクTb(=300N・m)と等しくなるように減速機16の減速比iが設定されている。そのため、減速後の前輪駆動モータ15の最大トルクTfrは、後輪駆動モータ18の最大トルクTb(=300N・m)と等しくされている。
本実施形態では、前輪駆動モータ15の最大トルクTf(=30N・m)が、後輪駆動モータ18の最大トルクTb(=300N・m)と等しくなるように減速機16の減速比iが設定されている。そのため、減速後の前輪駆動モータ15の最大トルクTfrは、後輪駆動モータ18の最大トルクTb(=300N・m)と等しくされている。
また、減速後の前輪駆動モータ15の回転数域およびトルク域は、後輪駆動モータ18の回転数域およびトルク域と比較して、略同程度の回転数域(0rpm〜1000rpm)および略同程度のトルク域(0N・m〜300N・m)とされている。したがって、減速後の前輪駆動モータ15の特性は、回転数域およびトルク域が、後輪駆動モータ18の回転数域およびトルク域と略等しくされている。
図4および図7を参照して、前輪駆動モータ15の第1モータ特性における高効率領域(低回転数域かつ高トルク域)は、減速機16の特性おける高効率領域(高トルク域)と重複している。したがって、減速後の前輪駆動モータ15の特性は、前輪駆動モータ15の第1モータ特性と同様に、低回転数域かつ高トルク域において高効率の領域を有している。
図5および図7を参照して、減速後の前輪駆動モータ15の特性および後輪駆動モータ18の特性は、いずれも、互いに異なる範囲に高効率領域および低効率領域を有している。より具体的には、減速後の前輪駆動モータ15の特性は、後輪駆動モータ18における高効率領域に相当する回転数域(たとえば500rpm〜1000rpmの範囲)およびトルク域(たとえば50N・m〜150N・mの範囲)に低効率領域を有している。一方、後輪駆動モータ18の特性は、減速後の前輪駆動モータ15における高効率領域に相当する回転数域(たとえば100rpm〜500rpmの範囲)およびトルク域(たとえば200N・m〜300N・mの範囲)に低効率領域を有している。
このように、本実施形態では、減速後の前輪駆動モータ15の回転数域と、後輪駆動モータ18の回転数域とが同程度(0rpm〜1000rpmの範囲)とされている。さらに、減速後の前輪駆動モータ15の最大回転数と後輪駆動モータ18の最大回転数とは、車両1の最高速度に応じた車輪回転数(1000rpm)とされている。また、本実施形態では、減速後の前輪駆動モータ15のトルク域と後輪駆動モータ18のトルク域とが同程度(0N・m〜300N・mの範囲)とされている。また、減速後の前輪駆動モータ15の最大トルクTfrと後輪駆動モータ18の最大トルクTbとが同程度(300N・m)とされている。
つまり、本実施形態の車両1において、減速後の前輪駆動モータ15の特性と後輪駆動モータ18の特性とは、互いに等しい回転数域およびトルク域を有していながらも、互いに異なる領域に高効率領域および低効率領域を有している。したがって、いずれか一方の車輪でしか回転不能な速度域がないため、トルク分配の自由度が高く、効率のよいトルク分配を行い易くなっている。
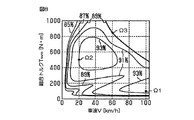
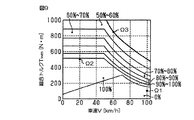
図8は、車両1の動力系の総合効率を示すマップである。図9は、前輪3に対するトルク分配を示すマップである。図8および図9において、横軸は車速Vであり、縦軸は全車輪(前輪3および後輪4)の総合車輪トルクTiwmを示している。図8および図9の各マップは、図4〜図7に示された、前輪駆動モータ15の第1モータ特性、後輪駆動モータ18の第2モータ特性および減速機16の特性に基づいて作成されたものである。
図8においてパーセンテージで示されている数値は、車両1の動力系の総合効率である。一方、図9においてパーセンテージで示されている数値は、前輪3に分配される総合車輪トルクTiwmの割合、つまり、前輪3に対する総合車輪トルクTiwmのトルク分配比である。
たとえば、前輪3に分配される総合車輪トルクTiwmの割合が「100%」、つまり、前輪3に対する総合車輪トルクTiwmのトルク分配比が「1」である場合、前輪3のみで総合車輪トルクTiwmが出力される。また、前輪3に分配される総合車輪トルクTiwmの割合が「50%」、つまり、前輪3に対する総合車輪トルクTiwmのトルク分配比が「0.5」である場合、前輪3で総合車輪トルクTiwmの半分が出力され、後輪4で総合車輪トルクTiwmの半分が出力される。
たとえば、前輪3に分配される総合車輪トルクTiwmの割合が「100%」、つまり、前輪3に対する総合車輪トルクTiwmのトルク分配比が「1」である場合、前輪3のみで総合車輪トルクTiwmが出力される。また、前輪3に分配される総合車輪トルクTiwmの割合が「50%」、つまり、前輪3に対する総合車輪トルクTiwmのトルク分配比が「0.5」である場合、前輪3で総合車輪トルクTiwmの半分が出力され、後輪4で総合車輪トルクTiwmの半分が出力される。
図9に示されるように、中速域(20km/h〜60km/hの範囲)かつ中トルク域(400N・m〜800N・mの範囲)の場合、同領域の効率が高い前輪3にトルクが主に分配される。また、高速域(70km/h〜100km/hの範囲)かつ低トルク域(100N・m〜250N・mの範囲)の場合、同領域の効率が高い後輪4にトルクが主に分配される。したがって、図8に示されるように、車両1の動力系の総合効率ηPは、中速域かつ中トルク域と、高速域かつ低トルク域とにおいて高くなっている。
車両1の動力系の総合効率は、車両1のエネルギー効率であり、前輪3および後輪4の両方に伝達される動力(車両駆動力)をバッテリ6の消費電力で除することで求められる。以下、動力系の総合効率を総合効率ηP、前輪3および後輪4に伝達される動力を車両駆動力P、バッテリ6の消費電力をバッテリ消費電力PBATと定義する。
車両駆動力Pは、前輪3側の出力を出力PF、後輪4側の出力を出力PRと定義すると、前輪3一つ当たりの第1車輪トルクTiwm1、前輪3一つ当たりの第1車輪回転数Niwm1、後輪4一つ当たりの第2車輪トルクTiwm2および後輪4一つ当たりの第2車輪回転数Niwm2を用いて、下記関係式(6)〜(8)により表される。なお、回転数の単位は「rpm」であり、トルクの単位は「N・m」である。また、車両駆動力P、前輪3側の出力PFおよび後輪4側の出力PRの各単位は「ワット(W)」である。
車両駆動力Pは、前輪3側の出力を出力PF、後輪4側の出力を出力PRと定義すると、前輪3一つ当たりの第1車輪トルクTiwm1、前輪3一つ当たりの第1車輪回転数Niwm1、後輪4一つ当たりの第2車輪トルクTiwm2および後輪4一つ当たりの第2車輪回転数Niwm2を用いて、下記関係式(6)〜(8)により表される。なお、回転数の単位は「rpm」であり、トルクの単位は「N・m」である。また、車両駆動力P、前輪3側の出力PFおよび後輪4側の出力PRの各単位は「ワット(W)」である。
P=PF+PR…(6)
PF=(2π/60)×(Niwm1×Tiwm1)×2…(7)
PR=(2π/60)×(Niwm2×Tiwm2)×2…(8)
なお、上記関係式(7)は、一対の右前輪3FRおよび左前輪3FLが略同一の構成であるので、右前輪3FRの出力および左前輪3FLの出力が同程度であると仮定した場合の計算式である。右前輪3FRの出力と左前輪3FLの出力とが異なる場合には、右前輪3FRの出力および左前輪3FLの出力を個別に算出して加算することにより、前輪3側の出力PFが求まる。
PF=(2π/60)×(Niwm1×Tiwm1)×2…(7)
PR=(2π/60)×(Niwm2×Tiwm2)×2…(8)
なお、上記関係式(7)は、一対の右前輪3FRおよび左前輪3FLが略同一の構成であるので、右前輪3FRの出力および左前輪3FLの出力が同程度であると仮定した場合の計算式である。右前輪3FRの出力と左前輪3FLの出力とが異なる場合には、右前輪3FRの出力および左前輪3FLの出力を個別に算出して加算することにより、前輪3側の出力PFが求まる。
同様に、上記関係式(8)では、一対の右後輪4RRおよび左後輪4RLが略同一の構成であるので、右後輪4RRの出力および左後輪4RLの出力が同程度であると仮定した場合の計算式である。右後輪4RRの出力と左後輪4RLの出力とが異なる場合には、右後輪4RRの出力および左後輪4RLの出力を個別に算出して加算することにより、後輪4側の出力PRが求まる。
バッテリ消費電力PBATは、バッテリ6の出力電流を出力電流IBAT、バッテリ6の出力電圧を出力電圧VBATと定義すると、下記関係式(9)により表される。出力電流IBATの単位は「アンペア(A)」であり、出力電圧VBATの単位は「ボルト(V)」である。また、バッテリ消費電力PBATの単位は「ワット(W)」である。
PBAT=IBAT×VBAT…(9)
そして、総合効率ηPは、上記の車両駆動力Pおよびバッテリ消費電力PBATを用いて、下記関係式(10)により表される。総合効率ηPの単位は「%」である。
PBAT=IBAT×VBAT…(9)
そして、総合効率ηPは、上記の車両駆動力Pおよびバッテリ消費電力PBATを用いて、下記関係式(10)により表される。総合効率ηPの単位は「%」である。
ηP=(P/PBAT)sign(PBAT)×100…(10)
上記関係式(10)において、sign(PBAT)は、バッテリ6が電力を消費して、全ての前輪駆動モータ15および後輪駆動モータ18を駆動するときには「1」となり、全ての前輪駆動モータ15および後輪駆動モータ18を駆動して、バッテリ6に電力を回生するときには「−1」となる無次元数である。
上記関係式(10)において、sign(PBAT)は、バッテリ6が電力を消費して、全ての前輪駆動モータ15および後輪駆動モータ18を駆動するときには「1」となり、全ての前輪駆動モータ15および後輪駆動モータ18を駆動して、バッテリ6に電力を回生するときには「−1」となる無次元数である。
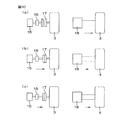
次に、図8および図9に加えて、図10を参照して、車両1の特定の走行条件に応じたトルク分配について説明する。図10は、車両1の走行条件に応じたトルク分配の様子を示す模式図である。
以下では、図8および図9の各マップに示された第1車両動作点Ω1、第2車両動作点Ω2および第3車両動作点Ω3におけるトルク分配について説明する。第1車両動作点Ω1、第2車両動作点Ω2および第3車両動作点Ω3は、車速Vおよび当該車速Vにおける全車輪の総合車輪トルクTiwmによって定まる点(V,Tiwm)である。
以下では、図8および図9の各マップに示された第1車両動作点Ω1、第2車両動作点Ω2および第3車両動作点Ω3におけるトルク分配について説明する。第1車両動作点Ω1、第2車両動作点Ω2および第3車両動作点Ω3は、車速Vおよび当該車速Vにおける全車輪の総合車輪トルクTiwmによって定まる点(V,Tiwm)である。
図8を参照して、第1車両動作点Ω1では、(V,Tiwm)=(100km/h,100N・m)であり、車両1が、高速かつ低トルクで走行する条件を示している。第1車両動作点Ω1における総合効率ηPは、93%である。また、第2車両動作点Ω2では、(V,Tiwm)=(20km/h,500N・m)であり、車両1が、低速かつ中トルクで走行する条件を示している。第2車両動作点Ω2における総合効率ηPは、93%である。また、第3車両動作点Ω3では、(V,Tiwm)=(60km/h,850N・m)であり、車両1が、高速かつ高トルクで走行する条件を示している。第3車両動作点Ω3における総合効率ηPは、89%である。
図9を参照して、第1車両動作点Ω1では、総合車輪トルクTiwm(=100N・m)の全てが後輪4に分配される。したがって、前輪3に分配されるトルクは零であり、前輪駆動モータ15が駆動されない。
しかし、実際には、第1車両動作点Ω1では、車両1の走行に伴って従動回転する前輪3を介して、減速機16と前輪駆動モータ15とが回転される。この場合、後輪駆動モータ18の出力するトルクの一部が、減速機16および前輪駆動モータ15の回転に消費されるので、エネルギー損失が発生する。そこで、本実施形態では、後輪駆動モータ18が駆動する一方で、前輪駆動モータ15が駆動しない場合には、従動回転する前輪3を介して減速機16および前輪駆動モータ15にトルクが伝達されないようにしている。
しかし、実際には、第1車両動作点Ω1では、車両1の走行に伴って従動回転する前輪3を介して、減速機16と前輪駆動モータ15とが回転される。この場合、後輪駆動モータ18の出力するトルクの一部が、減速機16および前輪駆動モータ15の回転に消費されるので、エネルギー損失が発生する。そこで、本実施形態では、後輪駆動モータ18が駆動する一方で、前輪駆動モータ15が駆動しない場合には、従動回転する前輪3を介して減速機16および前輪駆動モータ15にトルクが伝達されないようにしている。
具体的には、図10(a)を参照して、第1車両動作点Ω1では、クラッチ17を開放状態にすることによって、従動回転する前輪3を介して、減速機16および前輪駆動モータ15に後輪駆動モータ18の出力するトルクが伝達されないようにしている。これにより、前輪駆動モータ15および減速機16でのエネルギー損失の発生を抑制できる。前輪3を介して回転する前輪駆動モータ15や減速機16の回転エネルギーを回生することも可能であるが、伝達効率を考慮すれば、クラッチ17を切断したほうが総合的な損失は小さい。
図9を参照して、第2車両動作点Ω2では、総合車輪トルクTiwm(=500N・m)の全てが前輪3に分配される。したがって、後輪4に分配されるトルクは零であり、後輪駆動モータ18は駆動されない。
図10(b)を参照して、第2車両動作点Ω2では、総合車輪トルクTiwm(=500N・m)の全てが前輪3に分配されるため、クラッチ17が締結状態とされて、前輪駆動モータ15のみが駆動される。その一方で、後輪駆動モータ18は、車両1の走行に伴って従動回転する後輪4を介して回転される。後輪4側には減速機16が存在しない点に加え、後輪駆動モータ18は鉄損および引きずりトルクが比較的小さいため、後輪駆動モータ18の回転によって発生する損失は僅かである。このとき、後輪駆動モータ18は、図10(b)に示される矢印のように、入力される回転エネルギーによって回生を行ってもよい。
図10(b)を参照して、第2車両動作点Ω2では、総合車輪トルクTiwm(=500N・m)の全てが前輪3に分配されるため、クラッチ17が締結状態とされて、前輪駆動モータ15のみが駆動される。その一方で、後輪駆動モータ18は、車両1の走行に伴って従動回転する後輪4を介して回転される。後輪4側には減速機16が存在しない点に加え、後輪駆動モータ18は鉄損および引きずりトルクが比較的小さいため、後輪駆動モータ18の回転によって発生する損失は僅かである。このとき、後輪駆動モータ18は、図10(b)に示される矢印のように、入力される回転エネルギーによって回生を行ってもよい。
図9を参照して、第3車両動作点Ω3では、総合車輪トルクTiwm(=850N・m)のうちの50%(=425N・m)が前輪3に分配され、総合車輪トルクTiwm(=850N・m)のうちの50%(=425N・m)が後輪4に分配される。図10(c)を参照して、第3車両動作点Ω3では、前輪3および後輪4の両方が駆動されるため、前輪3側ではクラッチ17が締結状態とされる。
このように、本実施形態では、車両1の走行条件に応じて、回転数およびトルクに対する高効率領域の位置が異なる前輪駆動モータ15と後輪駆動モータ18が駆動制御される。そして、各走行条件に応じて、前輪3(減速後の前輪駆動モータ15)と後輪4(後輪駆動モータ18)に対するトルク分配比を変更することで、動力系の総合効率ηPを最大化することが可能となる。
次に、図11および図12を参照して、動力系の総合効率ηPを最大化するためにECU7によって実行される制御について説明する。図11は、ECU7の構成例を示すブロック図である。なお、図11では、説明の便宜上、インバータ5を、前輪駆動モータ15を駆動させるための第1インバータ5Aと、後輪駆動モータ18を駆動させるための第2インバータ5Bとに分けて示している。
図11を参照して、ECU7は、目標モータトルク演算部60と、第1目標モータ電流演算部61と、第1偏差演算部62と、第1PI制御部63と、第1PWM制御部64と、第2目標モータ電流演算部65と、第2偏差演算部66と、第2PI制御部67と、第2PWM制御部68とを含む。第1インバータ5Aには、前輪駆動モータ15に流れる実際の第1モータ駆動電流Im1を検出する第1電流検出回路69が接続されている。また、第2インバータ5Bには、後輪駆動モータ18に流れる実際の第2モータ駆動電流Im2を検出する第2電流検出回路70が接続されている。
目標モータトルク演算部60は、前輪駆動モータ15のモータトルクの目標値である第1目標モータトルクTm1 *と、後輪駆動モータ18のモータトルクの目標値である後輪駆動モータ18の第2目標モータトルクTm2 *とを演算する。以下、図12を参照して、第1目標モータトルクTm1 *および第2目標モータトルクTm2 *の演算例について説明する。図12は、図11に示される目標モータトルク演算部60による制御を説明するためのフローチャートである。
図12を参照して、目標モータトルク演算部60は、まず、全車輪の総合車輪トルクTiwmの目標値である総合目標車輪トルクTiwm *を演算する(ステップS1)。総合目標車輪トルクTiwm *は、アクセルセンサ19からのアクセル開度信号Acc、ブレーキセンサ20からのブレーキ信号Brk、車速センサ21からの車速信号(つまり、現在の車速V)および図8のマップに基づいて演算される。
次いで、目標モータトルク演算部60は、現在の車速Vおよび演算された総合目標車輪トルクTiwm *から、目標車両動作点Ω*(V,Tiwm *)を設定する(ステップS2)。
次いで、目標モータトルク演算部60は、設定された目標車両動作点Ω*(V,Tiwm *)および図9のマップから、前輪3に対する総合目標車輪トルクTiwm *の第1トルク分配比R1と、後輪4に対する総合目標車輪トルクTiwm *の車輪トルクの第2トルク分配比R2(=1−R1)とを演算する(ステップS3)。
次いで、目標モータトルク演算部60は、設定された目標車両動作点Ω*(V,Tiwm *)および図9のマップから、前輪3に対する総合目標車輪トルクTiwm *の第1トルク分配比R1と、後輪4に対する総合目標車輪トルクTiwm *の車輪トルクの第2トルク分配比R2(=1−R1)とを演算する(ステップS3)。
次いで、目標モータトルク演算部60は、総合目標車輪トルクTiwm *、第1トルク分配比R1および第2トルク分配比R2に基づいて、前輪3一つ当たりに要求される車輪トルクの目標値である第1目標車輪トルクTiwm1 *と、後輪4一つ当たりに要求される車輪トルクの目標値である第2目標車輪トルクTiwm2 *とを演算する(ステップS4)。第1目標車輪トルクTiwm1 *および第2目標車輪トルクTiwm2 *は、下記関係式(11)および(12)によって求められる。
Tiwm1 *=(Tiwm */2)×R1…(11)
Tiwm2 *=(Tiwm */2)×R2…(12)
次いで、目標モータトルク演算部60は、第1目標車輪トルクTiwm1 *および第2目標車輪トルクTiwm2 *に基づいて、前輪駆動モータ15のモータトルクの目標値である第1目標モータトルクTm1 *と、後輪駆動モータ18のモータトルクの目標値である後輪駆動モータ18の第2目標モータトルクTm2 *とを演算する(ステップS5)。
Tiwm2 *=(Tiwm */2)×R2…(12)
次いで、目標モータトルク演算部60は、第1目標車輪トルクTiwm1 *および第2目標車輪トルクTiwm2 *に基づいて、前輪駆動モータ15のモータトルクの目標値である第1目標モータトルクTm1 *と、後輪駆動モータ18のモータトルクの目標値である後輪駆動モータ18の第2目標モータトルクTm2 *とを演算する(ステップS5)。
第1目標モータトルクTm1 *および第2目標モータトルクTm2 *は、トルク増幅率α、減速機16の減速比i、減速機16の正効率ηを用いて、下記関係式(13)〜(15)によって求められる。なお、トルク増幅率α、減速機16の減速比iおよび減速機16の正効率ηは、いずれも減速機16の仕様に応じて定まる所定値である。
α=i×η…(13)
Tm1 *=Tiwm1 */α=Tiwm1 */(i×η)…(14)
Tm2 *=Tiwm2 *…(15)
このようにして、第1目標モータトルクTm1 *と第2目標モータトルクTm2 *とが目標モータトルク演算部60により演算される。目標モータトルク演算部60により演算された第1目標モータトルクTm1 *は、第1目標モータ電流演算部61に与えられる。また、目標モータトルク演算部60により演算された第2目標モータトルクTm2 *は、第2目標モータ電流演算部65に与えられる。
α=i×η…(13)
Tm1 *=Tiwm1 */α=Tiwm1 */(i×η)…(14)
Tm2 *=Tiwm2 *…(15)
このようにして、第1目標モータトルクTm1 *と第2目標モータトルクTm2 *とが目標モータトルク演算部60により演算される。目標モータトルク演算部60により演算された第1目標モータトルクTm1 *は、第1目標モータ電流演算部61に与えられる。また、目標モータトルク演算部60により演算された第2目標モータトルクTm2 *は、第2目標モータ電流演算部65に与えられる。
第1目標モータ電流演算部61は、前輪駆動モータ15の第1トルク定数Kt1の逆数(=1/Kt1)を第1目標モータトルクTm1 *に乗算することによって、前輪駆動モータ15を駆動するためのモータ駆動電流の目標値である第1目標モータ駆動電流Im1 *(=Tm1 */Kt1)を演算する。第1目標モータ電流演算部61により演算された第1目標モータ駆動電流Im1 *は、第1偏差演算部62に出力される。
第1偏差演算部62は、第1目標モータ電流演算部61により演算された第1目標モータ駆動電流Im1 *と、第1電流検出回路69により検出された第1モータ駆動電流Im1との第1電流偏差ΔI1(=Im1 *−Im1)を演算する。第1偏差演算部62によって演算される第1電流偏差ΔI1は、第1PI制御部63に出力される。
第1PI制御部63は、第1偏差演算部62によって演算される第1電流偏差ΔI1に対するPI演算を行うことにより、前輪駆動モータ15に流れる第1モータ駆動電流Im1を第1目標モータ駆動電流Im1 *に導くための第1駆動指令値X1を生成する。第1PI制御部63によって生成された第1駆動指令値X1は、第1PWM制御部64に入力される。
第1PI制御部63は、第1偏差演算部62によって演算される第1電流偏差ΔI1に対するPI演算を行うことにより、前輪駆動モータ15に流れる第1モータ駆動電流Im1を第1目標モータ駆動電流Im1 *に導くための第1駆動指令値X1を生成する。第1PI制御部63によって生成された第1駆動指令値X1は、第1PWM制御部64に入力される。
第1PWM制御部64は、第1PI制御部63によって生成された第1駆動指令値X1に対応するデューティ比のPWM制御信号を生成して、第1インバータ5Aに供給する。これにより、第1駆動指令値X1に対応した電力が前輪駆動モータ15に供給される。
第1偏差演算部62および第1PI制御部63は、電流フィードバック制御手段を構成している。この電流フィードバック制御手段の働きによって、前輪駆動モータ15に流れる第1モータ駆動電流Im1が、第1目標モータ電流演算部61によって演算される第1目標モータ駆動電流Im1 *に近づくように制御される。
第1偏差演算部62および第1PI制御部63は、電流フィードバック制御手段を構成している。この電流フィードバック制御手段の働きによって、前輪駆動モータ15に流れる第1モータ駆動電流Im1が、第1目標モータ電流演算部61によって演算される第1目標モータ駆動電流Im1 *に近づくように制御される。
これにより、前輪駆動モータ15が、第1目標モータトルクTm1 *(=Tiwm1 */(i×η))に応じた実際の第1モータトルクTm1(=Tiwm1/(i×η))で駆動制御される。また、これにより、前輪3が、第1目標車輪トルクTiwm1 *(=(i×η)×Tm1 *)に応じた第1車輪トルクTiwm1(=(i×η)×Tm1)で駆動制御される。
一方、第2目標モータ電流演算部65は、後輪駆動モータ18の第2トルク定数Kt2の逆数(=1/Kt2)を第2目標モータトルクTm2 *に乗算することによって、後輪駆動モータ18を駆動するためのモータ駆動電流の目標値である第2目標モータ駆動電流Im2 *(=Tm2 */Kt2)を演算する。第2目標モータ電流演算部65により演算された第2目標モータ駆動電流Im2 *は、第2偏差演算部66に出力される。
第2偏差演算部66は、第2目標モータ電流演算部65により演算された第2目標モータ駆動電流Im2 *と、第2電流検出回路70により検出された第2モータ駆動電流Im2との第2電流偏差ΔI2(=Im2 *−Im2)を演算する。第2偏差演算部66によって演算される第2電流偏差ΔI2は、第2PI制御部67に出力される。
第2PI制御部67は、第2偏差演算部66によって演算される第2電流偏差ΔI2に対するPI演算を行うことにより、後輪駆動モータ18に流れる第2モータ駆動電流Im2を第2目標モータ駆動電流Im2 *に導くための第2駆動指令値X2を生成する。第2PI制御部67によって生成された第2駆動指令値X2は、第2PWM制御部68に入力される。
第2PI制御部67は、第2偏差演算部66によって演算される第2電流偏差ΔI2に対するPI演算を行うことにより、後輪駆動モータ18に流れる第2モータ駆動電流Im2を第2目標モータ駆動電流Im2 *に導くための第2駆動指令値X2を生成する。第2PI制御部67によって生成された第2駆動指令値X2は、第2PWM制御部68に入力される。
第2PWM制御部68は、第2PI制御部67によって生成された第2駆動指令値X2に対応するデューティ比のPWM制御信号を生成して、第2インバータ5Bに供給する。これにより、第2駆動指令値X2に対応した電力が後輪駆動モータ18に供給される。
第2偏差演算部66および第2PI制御部67は、電流フィードバック制御手段を構成している。この電流フィードバック制御手段の働きによって、後輪駆動モータ18に流れる第2モータ駆動電流Im2が、第2目標モータ電流演算部65によって演算される第2目標モータ駆動電流Im2 *に近づくように制御される。
第2偏差演算部66および第2PI制御部67は、電流フィードバック制御手段を構成している。この電流フィードバック制御手段の働きによって、後輪駆動モータ18に流れる第2モータ駆動電流Im2が、第2目標モータ電流演算部65によって演算される第2目標モータ駆動電流Im2 *に近づくように制御される。
これにより、後輪駆動モータ18が、第2目標モータトルクTm2 *(=Tiwm2 *)に応じた実際の第2モータトルクTm2(=Tiwm2)で駆動制御される。また、これにより、後輪4が、第2目標車輪トルクTiwm2 *(=Tm2 *)に応じた実際の第2車輪トルクTiwm2(=Tm2)で駆動制御される。
このようにして、ECU7は、第1目標車輪トルクTiwm1 *と減速機16のトルク増幅率α(=i×η)とに基づいて演算された第1目標モータトルクTm1 *(=Tiwm1 */(i×η))と略等しい第1モータトルクTm1(=Tiwm1/(i×η))となるように前輪駆動モータ15を駆動制御(フィードバック制御)する。これにより、前輪3は、第1目標車輪トルクTiwm1 *(=(i×η)×Tm1 *)と略等しく、かつ減速機16のトルク増幅率α(=i×η)が考慮された第1車輪トルクTiwm1(=(i×η)×Tm1)で駆動制御される。
このようにして、ECU7は、第1目標車輪トルクTiwm1 *と減速機16のトルク増幅率α(=i×η)とに基づいて演算された第1目標モータトルクTm1 *(=Tiwm1 */(i×η))と略等しい第1モータトルクTm1(=Tiwm1/(i×η))となるように前輪駆動モータ15を駆動制御(フィードバック制御)する。これにより、前輪3は、第1目標車輪トルクTiwm1 *(=(i×η)×Tm1 *)と略等しく、かつ減速機16のトルク増幅率α(=i×η)が考慮された第1車輪トルクTiwm1(=(i×η)×Tm1)で駆動制御される。
また、ECU7は、第2目標車輪トルクTiwm2 *に基づいて演算された第2目標モータトルクTm2 *(=Tiwm2 *)と略等しい第2モータトルクTm2(=Tiwm2)となるように後輪駆動モータ18を駆動制御(フィードバック制御)する。これにより、後輪4は、第2目標車輪トルクTiwm2 *(=Tm2 *)と略等しい第2車輪トルクTiwm2(=Tm2)で駆動制御される。
なお、図11および図12において、ECU7は、第1目標車輪トルクTiwm1 *、第1目標モータトルクTm1 *、第2目標車輪トルクTiwm2 *および第2目標モータトルクTm2 *の間に、減速比iが考慮された下記関係式(16)、より具体的には、トルク増幅率α(=i×η)が考慮された下記関係式(17)が成立するように前輪駆動モータ15および後輪駆動モータ18を駆動制御しているとも捉えることが可能である。
(Tm1 *×i)/Tiwm1 *>Tm2 */Tiwm2 *…(16)
(Tm1 *×α)/Tiwm1 *>Tm2 */Tiwm2 *…(17)
以上、本実施形態の車両1では、減速後の前輪駆動モータ15と後輪駆動モータ18とが、互いに異なる効率特性を有している。したがって、前輪3および後輪4の両方をモータのみによって直接駆動させる場合に比べて、広い回転数域および広いトルク域で、動力系における総合効率ηPを高くするトルク分配を行うことが可能となる。また、本実施形態の車両1では、前輪3および後輪4の両方に減速機16が設けられた場合に比べて、後輪4側に減速機16を設けていない分、後輪4側の効率を高くすることができる。よって、様々な走行条件において、車輪を駆動する動力系の総合効率ηPを高くすることができる。
(Tm1 *×α)/Tiwm1 *>Tm2 */Tiwm2 *…(17)
以上、本実施形態の車両1では、減速後の前輪駆動モータ15と後輪駆動モータ18とが、互いに異なる効率特性を有している。したがって、前輪3および後輪4の両方をモータのみによって直接駆動させる場合に比べて、広い回転数域および広いトルク域で、動力系における総合効率ηPを高くするトルク分配を行うことが可能となる。また、本実施形態の車両1では、前輪3および後輪4の両方に減速機16が設けられた場合に比べて、後輪4側に減速機16を設けていない分、後輪4側の効率を高くすることができる。よって、様々な走行条件において、車輪を駆動する動力系の総合効率ηPを高くすることができる。
また、本実施形態の車両1では、減速後の前輪駆動モータ15が発生可能なトルク域(0N・m〜300N・mの範囲)と、後輪駆動モータ18が発生可能なトルク域(0N・m〜300N・mの範囲)とが同等のトルク域とされている。この構成によれば、前輪駆動モータ15により駆動される前輪3および後輪駆動モータ18により駆動される後輪4のいずれか一方の車輪でしか回転不能なトルク域がないため、トルク分配の自由度が高く、かつ、効率のよいトルク分配を行うことが可能となる。
また、本実施形態の車両1では、前輪3と減速機16との間にクラッチ17が配置されている。したがって、車両1の走行時において、駆動力が後輪駆動モータ18にのみ分配されている場合に、クラッチ17を開放状態とすることにより、従動回転する前輪3を介して減速機16および前輪駆動モータ15に駆動力が伝達されるのを防止できる。これにより、エネルギー損失を低減できる。
また、本実施形態の車両1では、後輪駆動モータ18側の第2モータシャフト57の径φ1が、前輪駆動モータ15側の第1モータシャフト36の径φ2よりも大きくされている。本実施形態では、後輪駆動モータ18は、前輪駆動モータ15と比べて高トルク低回転型のモータとされている。そのため、高トルク型の後輪駆動モータ18に連結された第2モータシャフト57(後輪側車軸51)に加わる応力が、低トルク型の前輪駆動モータ15に連結された第1モータシャフト36に加わる応力よりも大きくなる。そこで、後輪駆動モータ18側の第2モータシャフト57の径φ1を、前輪駆動モータ15側の第1モータシャフト36の径φ2よりも大きくすることによって、第2モータシャフト57の強度が高められている。これにより、後輪駆動モータ18から後輪4に回転駆動力を良好に伝達させることが可能となる。
また、本実施形態の車両1では、前輪駆動モータ15は、第1目標車輪トルクTiwm1 *と減速機16のトルク増幅率α(=i×η)とに基づいて演算された第1目標モータトルクTm1 *(=Tiwm1 */(i×η))と略等しい第1モータトルクTm1(=Tiwm1/(i×η))となるように駆動制御(フィードバック制御)される。そして、前輪3は、第1目標車輪トルクTiwm1 *(=(i×η)×Tm1 *)と略等しい第1車輪トルクTiwm1(=(i×η)×Tm1)で駆動制御される。つまり、前輪3は、減速機16の減速比i(より具体的には、減速機16のトルク増幅率α)が考慮された第1モータトルクTm1(=Tiwm1/(i×η))によって駆動される。これにより、前輪3に要求されるトルク不足を解消できるから、動力系の総合効率ηPを効果的に高めることができる。
その一方で、本実施形態の車両1では、後輪駆動モータ18は、第2目標車輪トルクTiwm2 *に基づいて演算された第2目標モータトルクTm2 *(=Tiwm2 *)と略等しい第2モータトルクTm2(=Tiwm2)となるように駆動制御(フィードバック制御)される。そして、後輪4は、第2目標車輪トルクTiwm2 *(=Tm2 *)と略等しい第2車輪トルクTiwm2(=(i×η)×Tm2)で駆動制御される。これにより、後輪4側では、過不足のない適切なトルクで後輪4を駆動させることができる。
以上、本発明の実施形態について説明したが、本発明の実施形態はさらに他の形態で実施することもできる。
たとえば、前述の実施形態において、前輪3に減速機16を設けずに、後輪4に減速機16が設けられた構成が採用されてもよい。この構成では、後輪駆動モータ18が、前輪駆動モータ15よりも高回転か低トルク型のモータとされる。この構成において、後輪駆動モータ18(減速機16)と後輪4との間にクラッチ17を設けてもよい。この場合、減速機16のない前輪駆動モータ15側には、クラッチ17を設けなくてもよい。
たとえば、前述の実施形態において、前輪3に減速機16を設けずに、後輪4に減速機16が設けられた構成が採用されてもよい。この構成では、後輪駆動モータ18が、前輪駆動モータ15よりも高回転か低トルク型のモータとされる。この構成において、後輪駆動モータ18(減速機16)と後輪4との間にクラッチ17を設けてもよい。この場合、減速機16のない前輪駆動モータ15側には、クラッチ17を設けなくてもよい。
また、前述の実施形態において、前輪駆動モータ15は、必ずしも前輪3(ホイール13)内に配置されていなくてもよい。前輪駆動モータ15は、その一部または全部がホイール13外に配置されていてもよい。同様に、後輪駆動モータ18は、必ずしも後輪4(ホイール13)内に配置されていなくてもよい。後輪駆動モータ18は、その一部または全部がホイール13外に配置されていてもよい。
また、前述の実施形態において、前輪3(右前輪3FRおよび左前輪3FL)を1つの前輪駆動モータ15で駆動し、後輪4(右後輪4RRおよび左後輪4RL)を1つの後輪駆動モータ18で駆動してもよい。
また、前述の実施形態において、後輪駆動モータ18は、第2ステータ54の径方向内側に第2ロータ55が配置されたインナーロータ型のモータであってもよい。
また、前述の実施形態において、後輪駆動モータ18は、第2ステータ54の径方向内側に第2ロータ55が配置されたインナーロータ型のモータであってもよい。
また、前述の実施形態では、車両1が加速または等速で走行する際のトルク(駆動力)分配について説明したが、車両1が減速する際の制動力(回生力)分配についても同様である。すなわち、前輪駆動モータ15および後輪駆動モータ18に対して、回生エネルギーが最大化できる制動力分配を求める際にも適用できる。
また、前述の実施形態において、減速機16の減速比iは、前輪駆動モータ15の最大トルクTfと後輪駆動モータ18の最大トルクTbを用いて、下記関係式(18)に基づいて設定されてもよい。
また、前述の実施形態において、減速機16の減速比iは、前輪駆動モータ15の最大トルクTfと後輪駆動モータ18の最大トルクTbを用いて、下記関係式(18)に基づいて設定されてもよい。
i=n×(Tb/Tf),n>0…(18)
上記関係式(18)において、前輪駆動モータ15の最大トルクTfが「30N・m」、後輪駆動モータ18の最大トルクTbが「300N・m」である場合には、減速機16の減速比iは「5〜20」となることが好ましい。これによれば、減速後の前輪駆動モータ15のトルク域と、後輪駆動モータ18のトルク域が乖離するのを抑制できる。なお、上記関係式(18)において、最大トルクTf,Tbは、定格トルクや始動トルクなどモータにおける他のトルクパラメータを用いてもよい。
上記関係式(18)において、前輪駆動モータ15の最大トルクTfが「30N・m」、後輪駆動モータ18の最大トルクTbが「300N・m」である場合には、減速機16の減速比iは「5〜20」となることが好ましい。これによれば、減速後の前輪駆動モータ15のトルク域と、後輪駆動モータ18のトルク域が乖離するのを抑制できる。なお、上記関係式(18)において、最大トルクTf,Tbは、定格トルクや始動トルクなどモータにおける他のトルクパラメータを用いてもよい。
また、前述の実施形態において、減速機16の減速比iは、前輪駆動モータ15の無負荷回転数Nfと後輪駆動モータ18の無負荷回転数Nbを用いて、下記関係式(19)に基づいて設定されてもよい。
i=m×(Nf/Nb),m>0…(19)
上記関係式(19)式において、前輪駆動モータ15の無負荷回転数Nfが「10000rpm」、後輪駆動モータ18の無負荷回転数Nbが「1000rpm」である場合には、減速機16の減速比iは「5〜20」となることが好ましい。これによれば、減速後の前輪駆動モータ15の回転数域と、後輪駆動モータ18の回転数域が乖離するのを抑制できる。なお、上記関係式(19)において、無負荷回転数Nf,Nbは、定格回転数(定格速度)や同期回転数(同期速度)などモータにおける他の回転数パラメータを用いてもよい。
i=m×(Nf/Nb),m>0…(19)
上記関係式(19)式において、前輪駆動モータ15の無負荷回転数Nfが「10000rpm」、後輪駆動モータ18の無負荷回転数Nbが「1000rpm」である場合には、減速機16の減速比iは「5〜20」となることが好ましい。これによれば、減速後の前輪駆動モータ15の回転数域と、後輪駆動モータ18の回転数域が乖離するのを抑制できる。なお、上記関係式(19)において、無負荷回転数Nf,Nbは、定格回転数(定格速度)や同期回転数(同期速度)などモータにおける他の回転数パラメータを用いてもよい。
また、前述の実施形態において、減速機16の減速比iは、上記関係式(18)および上記関係式(19)の両式を満たす値であってもよい。
また、前述の実施形態において、減速後の前輪駆動モータ15の最大トルクTfrと、後輪駆動モータ18の最大トルクTbとは、等しいトルクでなくてもよい。
また、前述の実施形態において、前輪駆動モータ15および後輪駆動モータ18は、誘導モータなどの他の交流モータであってもよい。
また、前述の実施形態において、減速後の前輪駆動モータ15の最大トルクTfrと、後輪駆動モータ18の最大トルクTbとは、等しいトルクでなくてもよい。
また、前述の実施形態において、前輪駆動モータ15および後輪駆動モータ18は、誘導モータなどの他の交流モータであってもよい。
また、前述の実施形態において、前輪駆動モータ15、減速機16および後輪駆動モータ18における回転数、トルク、および効率に係る特性は、上記実施形態における数値に限らず、自由に変更してもよい。
また、前述の実施形態において、インバータ5、第1電流検出回路69および第2電流検出回路70は、ECU7内に組み込まれていてもよい。
また、前述の実施形態において、インバータ5、第1電流検出回路69および第2電流検出回路70は、ECU7内に組み込まれていてもよい。
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
1…車両、3…前輪、4…後輪、7…ECU、15…前輪駆動モータ、16…減速機、17…クラッチ、18…後輪駆動モータ、26…前輪側車軸、28…車輪支持体、36…第1モータシャフト、40…サンギア、41…リングギア、42…遊星ギア、45…キャリア、46…遊星歯車機構、51…後輪側車軸、57…第2モータシャフト、65…目標モータトルク演算部、Tiwm…総合車輪トルク、Tiwm *…総合目標車輪トルク、Tiwm1…第1車輪トルク、Tiwm2…第2車輪トルク、Tiwm1 *…第1目標車輪トルク、Tiwm2 *…第2目標車輪トルク、Tm1…第1モータトルク、Tm2…第2モータトルク、Tm1 *…第1目標モータトルク、Tm2 *…第2目標モータトルク、i…減速比、α…トルク増幅率、η…正効率、φ1…第2モータシャフトの径、φ2…第1モータシャフトの径
Claims (5)
- 左右一対の第1車輪および左右一対の第2車輪と、
各前記第1車輪を回転駆動させ、第1モータ特性を有する第1モータと、
各前記第2車輪を回転駆動させ、前記第1モータ特性とは異なる第2モータ特性を有する第2モータと、
前記第1モータのトルクを増幅させて前記第1車輪に伝達させる減速機と、
全車輪の総合車輪トルクの目標値である総合目標車輪トルクを演算する総合目標車輪トルク演算手段と、
前記総合目標車輪トルク、前記第1モータ特性、前記第2モータ特性および前記減速機の特性に基づいて、前記第1車輪に要求される車輪トルクの目標値である第1目標車輪トルクと、前記第2車輪に要求される車輪トルクの目標値である第2目標車輪トルクとを演算する目標車輪トルク演算手段と、
前記減速機の減速比と前記第1目標車輪トルクとを用いて、前記第1モータのモータトルクの目標値である第1目標モータトルクを演算する第1目標モータトルク演算手段と、
前記第2目標車輪トルクに基づいて、前記第2モータのモータトルクの目標値である第2目標モータトルクを演算する第2目標モータトルク演算手段と、
前記第1目標モータトルクに基づいて前記第1モータを駆動制御し、前記第2目標モータトルクに基づいて前記第2モータを駆動制御するモータ駆動制御手段とを含む、車両。 - 前記第1目標モータトルク演算手段は、前記減速機の減速比および前記減速機の正効率の積である前記減速機のトルク増幅率と、前記第1目標車輪トルクとに基づいて前記第1目標モータトルクを演算する、請求項1に記載の車両。
- 前記第2モータは、前記第1モータと比較して低回転数かつ高トルクとされた低回転数高トルク型のモータである、請求項1または2に記載の車両。
- 前記第1車輪は、第1車軸を含み、
前記第2車輪は、第2車軸を含み、
前記第1モータは、前記減速機を介して前記第1車輪の前記第1車軸に連結された第1モータシャフトを含み、
前記第2モータは、前記第2車輪の前記第2車軸に連結された第2モータシャフトを含み、
前記第2モータの前記第2モータシャフトの径が、前記第1モータの前記第1モータシャフトの径よりも大きくされている、請求項1〜3のいずれか一項に記載の車両。 - 前記減速機は、前記第1モータによって回転駆動されるサンギアと、前記サンギアの周囲に配置されたリングギアと、前記サンギアと前記リングギアとの間に配置された遊星ギアと、前記遊星ギアを支持しかつ前記第1車輪に連結されたキャリアとを含む遊星歯車機構である、請求項1〜4のいずれか一項に記載の車両。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016042509A JP2017158403A (ja) | 2016-03-04 | 2016-03-04 | 車両 |
| US15/441,367 US20170253144A1 (en) | 2016-03-04 | 2017-02-24 | Vehicle |
| EP17158697.7A EP3213957A1 (en) | 2016-03-04 | 2017-03-01 | Electric vehicle |
| CN201710123988.4A CN107150613A (zh) | 2016-03-04 | 2017-03-03 | 车辆 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016042509A JP2017158403A (ja) | 2016-03-04 | 2016-03-04 | 車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017158403A true JP2017158403A (ja) | 2017-09-07 |
Family
ID=58231418
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016042509A Pending JP2017158403A (ja) | 2016-03-04 | 2016-03-04 | 車両 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20170253144A1 (ja) |
| EP (1) | EP3213957A1 (ja) |
| JP (1) | JP2017158403A (ja) |
| CN (1) | CN107150613A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2018047263A1 (ja) * | 2016-09-08 | 2019-03-07 | 三菱電機株式会社 | 消費電力調整装置、消費電力調整システム、消費電力調整方法、及び、プログラム |
| CN112622635A (zh) * | 2020-12-24 | 2021-04-09 | 奇瑞汽车股份有限公司 | 双电机扭矩分配的方法和装置 |
| JP2021141739A (ja) * | 2020-03-06 | 2021-09-16 | 株式会社Subaru | 電動車両の制御装置 |
| WO2024116300A1 (ja) * | 2022-11-30 | 2024-06-06 | 日産自動車株式会社 | 四輪駆動車の駆動力制御方法および装置 |
| JP2024522517A (ja) * | 2021-06-01 | 2024-06-21 | ボルボトラックコーポレーション | 車輪スリップバランス駆動に基づくエネルギー効率の良い推進 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3036122B1 (en) * | 2013-08-19 | 2018-11-07 | Saimaan Ammattikorkeakoulu Oy | An electrical motor construction provided with a planetary gear system |
| US9987933B2 (en) * | 2015-03-10 | 2018-06-05 | Chen-Yang Wu | Range-extending, charging, and driving apparatus for an electric vehicle |
| GB201715702D0 (en) * | 2017-09-28 | 2017-11-15 | Jaguar Land Rover Ltd | Method and apparatus for controlling electric machines |
| JP6741645B2 (ja) * | 2017-12-22 | 2020-08-19 | 株式会社Subaru | 車両の制御装置及び車両の制御方法 |
| CN108528275B (zh) * | 2018-05-28 | 2020-11-17 | 武汉理工大学 | 一种轮毂电机驱动城市公交的动力分配及功率匹配方法 |
| CN111169274A (zh) * | 2018-11-13 | 2020-05-19 | 舍弗勒技术股份两合公司 | 轮毂电机驱动系统及机动车 |
| CN109733207A (zh) * | 2019-01-14 | 2019-05-10 | 北京长城华冠汽车科技股份有限公司 | 电动车辆及其驱动系统和驱动方法 |
| CN110203075B (zh) * | 2019-05-31 | 2022-08-05 | 武汉理工大学 | 一种四轮轮毂电机车辆系统动力匹配方法 |
| CN110466360B (zh) * | 2019-08-12 | 2021-08-24 | 山东元齐新动力科技有限公司 | 一种车辆控制方法、装置及车辆 |
| US11560053B2 (en) | 2019-10-03 | 2023-01-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Electric vehicle comprising a vertical electric propulsion motor and method of making and using the same |
| US11305640B2 (en) | 2019-10-03 | 2022-04-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | Vehicle caravan of electric vehicles configured for coordinated movement and airflow control and method of using |
| US11279227B2 (en) | 2019-10-03 | 2022-03-22 | Toyota Motor Engineering & Manufacturing North America, Inc. | Rotatable drive axle assembly for an electric vehicle |
| US11447006B2 (en) | 2019-10-03 | 2022-09-20 | Toyota Motor Engineering & Manufacturing North America, Inc. | Electric or hybrid electric vehicle having adjustable vertical electric drive motor and method of making and using |
| US11590977B2 (en) * | 2019-12-31 | 2023-02-28 | Rivian Ip Holdings, Llc | Systems and methods for providing a vehicle with a torque vectored K-turn mode |
| CA3175561A1 (en) | 2020-04-17 | 2021-10-21 | Polaris Industries Inc. | Torque vectoring for utility vehicles |
| CN113715597B (zh) * | 2020-05-21 | 2023-02-03 | 华为数字能源技术有限公司 | 动力驱动系统及车辆 |
| GB2597989A (en) * | 2020-08-14 | 2022-02-16 | Jaguar Land Rover Ltd | Vehicle propulsion system |
| CN113561800B (zh) * | 2020-09-29 | 2024-04-02 | 株式会社电装 | 带升压四驱系统的控制方法 |
| CN113954622A (zh) * | 2021-09-29 | 2022-01-21 | 合肥工业大学 | 一种两档可旋转轮毂电机四驱小车 |
| US20230042483A1 (en) * | 2021-10-16 | 2023-02-09 | Atlis Motor Vehicles, Inc. | Systems and Methods for Compensating for Steering System Failure |
| DE102022000026A1 (de) * | 2022-01-03 | 2023-07-06 | Mercedes-Benz Group AG | Radnabenantrieb für ein Kraftfahrzeug, insbesondere für einen Kraftwagen, sowie Kraftfahrzeug |
| JP7827493B2 (ja) * | 2022-03-10 | 2026-03-10 | 株式会社Subaru | 車両の制御装置及びコンピュータプログラム |
| CN117048361B (zh) * | 2023-08-31 | 2025-08-12 | 赛力斯汽车有限公司 | 基于扭矩分配比调整的扭矩控制方法、装置、介质及车辆 |
| DE102023004702A1 (de) * | 2023-11-17 | 2025-05-22 | Mercedes-Benz Group AG | Radnabenantrieb für ein Kraftfahrzeug sowie Kraftfahrzeug |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0622264B1 (en) * | 1993-04-28 | 1998-11-11 | Hitachi, Ltd. | Electric vehicle drive system and drive method |
| JP3678053B2 (ja) * | 1999-05-06 | 2005-08-03 | 日産自動車株式会社 | 車両用駆動装置 |
| US20090152030A1 (en) * | 2007-12-14 | 2009-06-18 | Dennis Palatov | Apparatus and Method for Electric Vehicle Utilizing Dissimilar Electric Motors |
| JP2011188557A (ja) | 2010-03-04 | 2011-09-22 | Yokohama National Univ | 力行回生配分による航続距離延長制御システム及び方法 |
| DE102010062227A1 (de) * | 2010-11-30 | 2012-05-31 | Robert Bosch Gmbh | Elektrofahrzeug und Verfahren zum Antreiben eines Elektrofahrzeugs |
| KR101757317B1 (ko) * | 2011-07-12 | 2017-07-12 | 현대모비스 주식회사 | 인휠 구동장치 |
| US9199526B2 (en) * | 2013-02-26 | 2015-12-01 | Jtekt Corporation | Vehicle and vehicle driving device |
| JP5880518B2 (ja) * | 2013-10-17 | 2016-03-09 | トヨタ自動車株式会社 | 電動車両 |
| US20160090005A1 (en) * | 2014-03-10 | 2016-03-31 | Dean Drako | Distributed Torque Generation System and Method of Control |
| JP6341768B2 (ja) * | 2014-06-11 | 2018-06-13 | 株式会社 神崎高級工機製作所 | 電動モータ駆動装置 |
-
2016
- 2016-03-04 JP JP2016042509A patent/JP2017158403A/ja active Pending
-
2017
- 2017-02-24 US US15/441,367 patent/US20170253144A1/en not_active Abandoned
- 2017-03-01 EP EP17158697.7A patent/EP3213957A1/en not_active Withdrawn
- 2017-03-03 CN CN201710123988.4A patent/CN107150613A/zh active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2018047263A1 (ja) * | 2016-09-08 | 2019-03-07 | 三菱電機株式会社 | 消費電力調整装置、消費電力調整システム、消費電力調整方法、及び、プログラム |
| JP2021141739A (ja) * | 2020-03-06 | 2021-09-16 | 株式会社Subaru | 電動車両の制御装置 |
| JP7421961B2 (ja) | 2020-03-06 | 2024-01-25 | 株式会社Subaru | 電動車両の制御装置 |
| CN112622635A (zh) * | 2020-12-24 | 2021-04-09 | 奇瑞汽车股份有限公司 | 双电机扭矩分配的方法和装置 |
| CN112622635B (zh) * | 2020-12-24 | 2022-07-08 | 奇瑞汽车股份有限公司 | 双电机扭矩分配的方法和装置 |
| JP2024522517A (ja) * | 2021-06-01 | 2024-06-21 | ボルボトラックコーポレーション | 車輪スリップバランス駆動に基づくエネルギー効率の良い推進 |
| WO2024116300A1 (ja) * | 2022-11-30 | 2024-06-06 | 日産自動車株式会社 | 四輪駆動車の駆動力制御方法および装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3213957A1 (en) | 2017-09-06 |
| CN107150613A (zh) | 2017-09-12 |
| US20170253144A1 (en) | 2017-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017158403A (ja) | 車両 | |
| US9199526B2 (en) | Vehicle and vehicle driving device | |
| US8177007B2 (en) | Power unit | |
| CN103237706B (zh) | 混合电动车辆 | |
| CN103502069B (zh) | 用于具有电动的车辆驱动装置的车辆的防抱死系统 | |
| JP2017081247A (ja) | 車両用操舵装置 | |
| US20130006460A1 (en) | Electric automobile | |
| JP6534509B2 (ja) | 車輪独立駆動式車両の駆動制御装置 | |
| JP2009142036A (ja) | 電動車両 | |
| JP6976083B2 (ja) | 車両動力補助システムおよび車両従動輪回生システム | |
| JP2007161191A (ja) | ステアリング制御装置および電動車両 | |
| JP6096411B2 (ja) | ハイブリッド車両の発電制御装置 | |
| JP6651374B2 (ja) | 車輪独立駆動式車両の駆動制御装置 | |
| US8892288B2 (en) | Method and device for controlling the drive train of an electric vehicle | |
| CN107035847B (zh) | 一种带有转矩定向分配功能的电动差速器 | |
| WO2016125686A1 (ja) | 車両の制駆動トルク制御装置 | |
| JP2018088768A (ja) | モータ搭載自動車の駆動制御装置 | |
| WO2021182428A1 (ja) | 車輪独立駆動式車両の駆動制御装置 | |
| US20040263112A1 (en) | Electric differential traction-control drive system | |
| JP2017034785A (ja) | モータ駆動装置 | |
| JP2012030761A (ja) | ハイブリッド車両の制御装置 | |
| CN106956578A (zh) | 电动汽车 | |
| CN104417339B (zh) | 混合动力车辆用轮毂系统 | |
| JP2007325372A (ja) | 電動車両の制御装置 | |
| CN106870685B (zh) | 一种带有转矩定向分配功能的电动差速器 |