JP2017159028A - 超音波診断装置 - Google Patents
超音波診断装置 Download PDFInfo
- Publication number
- JP2017159028A JP2017159028A JP2017021035A JP2017021035A JP2017159028A JP 2017159028 A JP2017159028 A JP 2017159028A JP 2017021035 A JP2017021035 A JP 2017021035A JP 2017021035 A JP2017021035 A JP 2017021035A JP 2017159028 A JP2017159028 A JP 2017159028A
- Authority
- JP
- Japan
- Prior art keywords
- probe
- transmission
- reception
- aperture
- diagnostic apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




















Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
【解決手段】実施形態の超音波診断装置は、第1の方向と、前記第1の方向に直交する第2の方向に配列される複数の振動素子を具備し、前記第1の方向及び前記第2の方向に2次元スキャンが可能なプローブと、前記プローブを保持し前記プローブを前記第2の方向に機械的に移動させる移動デバイスと、前記第2の方向における前記プローブの複数の移動位置毎に、前記複数の振動素子で夫々受信される複数の反射信号を受信整相加算して第1の受信信号を生成する受信回路と、前記プローブの前記複数の移動位置毎に生成される前記第1の受信信号を、前記プローブの位置情報に基づいて移動開口合成して第2の受信信号を生成する移動開口合成部と、生成された前記第2の受信信号から画像データを生成する画像生成部と、を備える。
【選択図】 図2
Description
図1は、本実施形態に係る超音波診断装置1の概略の構成を示す図である。超音波診断装置1は、超音波診断装置本体200(以下、単に装置本体200と呼ぶ)、超音波プローブ120、ロボットアーム110、及びロボットアーム制御部140を少なくとも備える。ここで、ロボットアーム110は、超音波プローブ120を機械的に移動させる移動デバイスの一例である。
生成されたこれらの画像や、これらの画像に関連するデータは、ディスプレイ250に表示される。
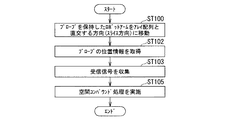
図4は、本実施形態にかかる超音波診断装置1の処理例を示すフローチャートである。以下、図4のフローチャートの流れに沿って、第2の処理回路300で実現する上記の各機能、及びアーム制御回路140で実現する機能を具体的に説明する。
今、図13(a)、(b)、(c)に示す2DAプローブの位置を、夫々A位置、B位置、C位置とする。まず、2DAプローブがA位置にあるとき、2DAプローブの各受信チャネルの信号は、受信回路232の受信整相加算回路234において、各チャネルに所望の遅延を加えて加算される。この結果、2DAプローブがA位置にあるときの、観察点P1に対応したエコー信号が得られる。
なお、図13及び図15に示す開口合成は、プローブを移動させて行う開口合成であるため、移動開口合成と呼ぶ場合がある。
これら3つのエコー信号は、受信側のパス長の差異(即ち、観測点P3から素子EL1〜素子EL6までの距離の差異)に関しては受信整相加算によって補正されているものの、送信側のパス長は、送信開口AP1〜AP3で夫々異なっている。つまり、各送信焦点F1〜F3から、観測点P3までの伝搬距離がそれぞれ異なっている。
ここで、信号収集機能(2)311、及び、送信遅延補正機能323は、図17に示すものと同じである。
110…ロボットアーム
111…アームセンサ
112…プローブセンサ
120…超音波プローブ
140…ロボットアーム制御部、ロボットアーム制御回路(制御部)
150…磁気送信機
160…触覚付入力デバイス
210…第1の処理回路
300…第2の処理回路
310…プローブ位置取得機能
311…信号収集機能
312…開口合成処理機能
313…空間コンパウンド処理機能
Claims (20)
- 第1の方向と、前記第1の方向に直交する第2の方向に配列される複数の振動素子を具備し、前記第1の方向及び前記第2の方向に2次元スキャンが可能なプローブと、
前記プローブを保持し前記プローブを前記第2の方向に機械的に移動させる移動デバイスと、
前記第2の方向における前記プローブの複数の移動位置毎に、前記複数の振動素子で夫々受信される複数の反射信号を受信整相加算して第1の受信信号を生成する受信回路と、
前記プローブの前記複数の移動位置毎に生成される前記第1の受信信号を、前記プローブの位置情報に基づいて移動開口合成して第2の受信信号を生成する移動開口合成部と、
生成された前記第2の受信信号から画像データを生成する画像生成部と、
を備える超音波診断装置。 - 前記第2の方向の前記振動素子の配列数は、前記第1の方向の前記振動素子の配列数よりも少ない、
請求項1に記載の超音波診断装置。 - 前記受信整相加算は、被検体内の3次元空間の観測点から前記複数の振動素子までの遅延が略同一となるように当該遅延を補正した後前記複数の反射信号をコヒーレント加算して前記第1の受信信号を生成する処理であり、
前記移動開口合成は、前記プローブの移動に伴って変化する前記観測点からの遅延が、前記プローブの夫々の位置において略同一となるように当該遅延を補正した後、前記第1の受信信号をコヒーレント加算して前記第2の受信信号を生成する処理である、
請求項1に記載の超音波診断装置。 - 前記プローブの送信開口を複数の部分送信開口に分割し、前記複数の部分送信開口に夫々対応する複数の仮想的な点音源を形成するように、前記複数の部分送信開口の夫々から超音波信号を送信する送信部と、
送信整相加算部と、をさらに備え、
前記第1の受信信号は前記複数の部分送信開口に夫々対応する複数の受信信号であり、
前記送信整相加算部は、前記複数の仮想的な点音源から前記観測点までの遅延が略同一となるように当該遅延を補正した後、複数の前記第1の受信信号をコヒーレント加算する送信開口合成を行って複数の受信信号を生成し、
前記移動開口合成部は、送信開口合成された前記複数の受信信号から、前記第2の受信信号を生成する、
請求項1に記載の超音波診断装置。 - 前記送信部は、前記第1の方向において、前記送信開口を前記複数の部分送信開口に分割し、
前記送信整相加算部は、前記第1の方向において前記送信開口合成を行う、
請求項4に記載の超音波診断装置。 - 前記送信部は、前記第2の方向において、前記送信開口を前記複数の部分送信開口に分割し、
前記送信整相加算部は、前記第2の方向において前記送信開口合成を行う、
請求項4に記載の超音波診断装置。 - 第1の方向に配列される複数の振動素子を具備し、前記第1の方向に1次元スキャンが可能なプローブと、
前記プローブを保持し前記プローブを、前記第1の方向に直交する第2の方向に機械的に移動させる移動デバイスと、
前記プローブの送信開口を複数の部分送信開口に分割し、前記複数の部分送信開口に夫々対応する複数の仮想的な点音源を形成するように、前記複数の部分送信開口の夫々から超音波信号を送信する送信部と、
前記第2の方向における前記プローブの複数の移動位置毎に、前記振動素子で受信される被検体内の3次元空間の観測点からの複数の反射信号を受信整相加算して、前記複数の部分送信開口に夫々対応する複数の第1の受信信号を生成する受信整相加算部と、
前記複数の仮想的な点音源から前記観測点までの遅延が略同一となるように当該遅延を補正した後、複数の前記第1の受信信号をコヒーレント加算して送信開口合成する送信整相加算部と、
前記送信開口合成された複数の受信信号を、前記プローブの位置情報に基づいて移動開口合成して第2の受信信号を生成する移動開口合成部と、
生成された前記第2の受信信号から画像データを生成する画像生成部と、
を備える超音波診断装置。 - 前記受信整相加算は、前記複数の振動素子までの遅延が略同一となるように当該遅延を補正した後前記複数の反射信号をコヒーレント加算して前記第1の受信信号を生成する処理であり、
前記移動開口合成は、前記プローブの移動に伴って変化する前記観測点からの遅延が、前記プローブの夫々の位置において略同一となるように当該遅延を補正した後、前記第1の受信をコヒーレント加算して前記第2の受信信号を生成する処理である、
請求項7に記載の超音波診断装置。 - 前記送信部は、前記第1の方向において、前記送信開口を前記複数の部分送信開口に分割し、
前記送信整相加算部は、前記第1の方向において前記送信開口合成を行う、
請求項7に記載の超音波診断装置。 - 複数の振動素子を具備するプローブと、
前記プローブを保持し前記プローブを機械的に移動させる移動デバイスと、
前記プローブの複数の移動位置毎に、前記複数の振動素子で夫々受信される複数の反射信号を受信整相加算して第1の受信信号を生成する受信整相加算部と、
前記プローブの前記複数の移動位置毎に生成される複数の前記第1の受信信号を、前記プローブの位置情報に基づいて移動開口コンパウンド処理して第2の受信信号を生成する移動開口コンパウンド処理部と、
生成された前記第2の受信信号から画像データを生成する画像生成部と、
を備える超音波診断装置。 - 前記受信整相加算は、被検体内の3次元空間の観測点から前記複数の振動素子までの遅延が略同一となるように当該遅延を補正した後前記複数の反射信号をコヒーレント加算して前記第1の受信信号を生成する処理であり、
前記移動開口コンパウンド処理は、前記プローブの移動に伴って変化する前記観測点からの遅延が、前記プローブの夫々の位置において略同一となるように当該遅延を補正した後、前記複数の第1の受信信号をインコヒーレント加算して前記第2の受信信号を生成する処理である、
請求項10に記載の超音波診断装置。 - 前記プローブの送信開口を複数の部分送信開口に分割し、前記複数の部分送信開口に夫々対応する複数の仮想的な点音源を形成するように、前記複数の部分送信開口の夫々から超音波信号を送信する送信部と、
送信整相加算部と、をさらに備え、
前記第1の受信信号は前記複数の部分送信開口に夫々対応する複数の受信信号であり、
前記送信整相加算部は、前記複数の仮想的な点音源から前記観測点までの遅延が略同一となるように当該遅延を補正した後、複数の前記第1の受信信号をコヒーレント加算する送信開口合成を行って複数の受信信号を生成し、
前記移動開口コンパウンド処理部は、送信開口合成された前記複数の受信信号から、前記第2の受信信号を生成する、
請求項10に記載の超音波診断装置。 - 前記プローブは第1の方向に1次元スキャンが可能であり、
前記移動デバイスは、前記第1の方向に直交する第2の方向に前記プローブを移動させる、
請求項11に記載の超音波診断装置。 - 前記移動開口コンパウンド処理部は、前記複数の第1の受信信号に対応するビームの点拡がり関数であって、ディスプレイに表示する3次元再構成されたMPR断面方向、あるいは3次元画像の表示方向に対するビームの点拡がり関数の特性より重み付けし、重み付けされた前記複数の第1の受信信号をインコヒーレント加算する、
請求項10に記載の超音波診断装置。 - 前記移動開口コンパウンド処理部は、前記複数の受信信号に対応するビームの点拡がり関数であって、生体構造の方向に対するビームの点拡がり関数の特性より重み付けし、重み付けされた前記複数の受信信号をインコヒーレント加算する、
請求項10に記載の超音波診断装置。 - 前記移動デバイスはロボットアームを備えて構成され、
前記ロボットアームによる前記プローブの移動経路上において、前記プローブの位置、速度、及び前記プローブの生体接触圧力の少なくとも一つの情報を取得する位置取得部、を更に備え、
前記移動開口合成部は、取得した前記少なくとも1つの情報に基づいて、前記第1の受信信号を移動開口合成する、
請求項1に記載の超音波診断装置。 - 前記移動デバイスはロボットアームを備えて構成され、
前記ロボットアームによる前記プローブの移動経路上において、前記プローブの位置、速度、及び前記プローブの生体接触圧力の少なくとも一つの情報を取得する位置取得部、を更に備え、
前記移動開口合成部は、前記送信開口合成された前記複数の受信信号を、取得した前記少なくとも1つの情報に基づいて移動開口合成して第2の受信信号を生成する、
請求項7に記載の超音波診断装置。 - 前記移動デバイスはロボットアームを備えて構成され、
前記ロボットアームによる前記プローブの移動経路上において、前記プローブの位置、速度、及び前記プローブの生体接触圧力の少なくとも一つの情報を取得する位置取得部、を更に備え、
前記移動開口コンパウンド処理部は、複数の前記第1の受信信号を、取得した前記少なくとも1つの情報に基づいて前記空間コンパウンド処理して前記第2の受信信号を生成する、
請求項10に記載の超音波診断装置。 - 前記移動開口コンパウンド処理部は、前記移動経路上において、同一対象領域に対して異なる方向から複数のデータを取得し、取得した複数のデータに対して所定の演算を行って3次元データを生成することにより、前記移動開口コンパウンド処理を行う、
請求項18に記載の超音波診断装置。 - 前記所定の演算は、信号強度又は信号対雑音比に基づく重み付け演算、最大値又は最小値に基づく演算、及び異なる送信周波数で得られたデータに基づく演算、の少なくとも1つを含む演算である、
請求項19に記載の超音波診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/450,886 US11103214B2 (en) | 2016-03-07 | 2017-03-06 | Ultrasonic diagnostic apparatus using synthetic and moving aperture synthesis |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016043829 | 2016-03-07 | ||
| JP2016043829 | 2016-03-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017159028A true JP2017159028A (ja) | 2017-09-14 |
| JP6925815B2 JP6925815B2 (ja) | 2021-08-25 |
Family
ID=59853719
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017021035A Active JP6925815B2 (ja) | 2016-03-07 | 2017-02-08 | 超音波診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6925815B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019118715A (ja) * | 2018-01-10 | 2019-07-22 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置、医用画像処理装置及び医用画像処理プログラム |
| JP2019216853A (ja) * | 2018-06-15 | 2019-12-26 | 株式会社日立製作所 | 超音波撮像装置 |
| WO2021090390A1 (ja) * | 2019-11-06 | 2021-05-14 | 株式会社Fuji | 超音波プローブの位置ずれ量測定装置 |
| JP2024518474A (ja) * | 2021-05-10 | 2024-05-01 | コーニンクレッカ フィリップス エヌ ヴェ | コヒーレントに合成された超音波画像生成、並びに関連するシステム、方法、及び装置 |
| WO2024185958A1 (ko) * | 2023-03-09 | 2024-09-12 | 한국기계연구원 | 초음파 영상화 시스템 및 이를 이용한 초음파 영상화 방법 |
| WO2025052817A1 (ja) * | 2023-09-06 | 2025-03-13 | 国立研究開発法人 産業技術総合研究所 | 医療支援ロボットの動作を生成する方法および医療支援ロボットシステム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10179579A (ja) * | 1996-12-20 | 1998-07-07 | Matsushita Electric Ind Co Ltd | 超音波診断装置 |
| JP2010269046A (ja) * | 2009-05-25 | 2010-12-02 | Canon Inc | 超音波装置 |
| JP2011045659A (ja) * | 2009-08-28 | 2011-03-10 | Toshiba Corp | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム |
| JP2012161563A (ja) * | 2011-02-09 | 2012-08-30 | Canon Inc | 被検体情報取得装置 |
| JP2015058046A (ja) * | 2013-09-17 | 2015-03-30 | 株式会社東芝 | 超音波診断装置及び超音波イメージングプログラム |
| US20150359512A1 (en) * | 2014-06-11 | 2015-12-17 | The Johns Hopkins University | Synthetic aperture ultrasound system |
| JP2016002281A (ja) * | 2014-06-17 | 2016-01-12 | 日立アロカメディカル株式会社 | 超音波診断装置 |
-
2017
- 2017-02-08 JP JP2017021035A patent/JP6925815B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10179579A (ja) * | 1996-12-20 | 1998-07-07 | Matsushita Electric Ind Co Ltd | 超音波診断装置 |
| JP2010269046A (ja) * | 2009-05-25 | 2010-12-02 | Canon Inc | 超音波装置 |
| JP2011045659A (ja) * | 2009-08-28 | 2011-03-10 | Toshiba Corp | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム |
| JP2012161563A (ja) * | 2011-02-09 | 2012-08-30 | Canon Inc | 被検体情報取得装置 |
| JP2015058046A (ja) * | 2013-09-17 | 2015-03-30 | 株式会社東芝 | 超音波診断装置及び超音波イメージングプログラム |
| US20150359512A1 (en) * | 2014-06-11 | 2015-12-17 | The Johns Hopkins University | Synthetic aperture ultrasound system |
| JP2016002281A (ja) * | 2014-06-17 | 2016-01-12 | 日立アロカメディカル株式会社 | 超音波診断装置 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019118715A (ja) * | 2018-01-10 | 2019-07-22 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置、医用画像処理装置及び医用画像処理プログラム |
| US11744552B2 (en) | 2018-01-10 | 2023-09-05 | Canon Medical Systems Corporation | Ultrasound diagnostic apparatus, medical image processing apparatus, and medical image processing method |
| JP7387249B2 (ja) | 2018-01-10 | 2023-11-28 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置、医用画像処理装置及び医用画像処理プログラム |
| JP2019216853A (ja) * | 2018-06-15 | 2019-12-26 | 株式会社日立製作所 | 超音波撮像装置 |
| JP6997681B2 (ja) | 2018-06-15 | 2022-01-18 | 富士フイルムヘルスケア株式会社 | 超音波撮像装置 |
| WO2021090390A1 (ja) * | 2019-11-06 | 2021-05-14 | 株式会社Fuji | 超音波プローブの位置ずれ量測定装置 |
| JPWO2021090390A1 (ja) * | 2019-11-06 | 2021-05-14 | ||
| JP7256289B2 (ja) | 2019-11-06 | 2023-04-11 | 株式会社Fuji | 超音波プローブの位置ずれ量測定装置 |
| JP2024518474A (ja) * | 2021-05-10 | 2024-05-01 | コーニンクレッカ フィリップス エヌ ヴェ | コヒーレントに合成された超音波画像生成、並びに関連するシステム、方法、及び装置 |
| WO2024185958A1 (ko) * | 2023-03-09 | 2024-09-12 | 한국기계연구원 | 초음파 영상화 시스템 및 이를 이용한 초음파 영상화 방법 |
| WO2025052817A1 (ja) * | 2023-09-06 | 2025-03-13 | 国立研究開発法人 産業技術総合研究所 | 医療支援ロボットの動作を生成する方法および医療支援ロボットシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6925815B2 (ja) | 2021-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6925815B2 (ja) | 超音波診断装置 | |
| JP5373308B2 (ja) | 超音波撮像装置及び超音波撮像方法 | |
| JP3892594B2 (ja) | 超音波診断装置 | |
| US11103214B2 (en) | Ultrasonic diagnostic apparatus using synthetic and moving aperture synthesis | |
| US8197412B2 (en) | Ultrasonic diagnostic apparatus | |
| KR20160041516A (ko) | 빔포밍 장치 및 이를 포함하는 초음파 진단장치 | |
| JP4969985B2 (ja) | 超音波診断装置、及び超音波診断装置の制御プログラム | |
| JP2010042266A (ja) | 超音波撮像装置および超音波撮像方法 | |
| JP2015054056A (ja) | 超音波診断装置及び超音波イメージングプログラム | |
| US20150196280A1 (en) | Ultrasound diagnostic apparatus, ultrasound image generating method, and recording medium | |
| US20170209122A1 (en) | Beamforming apparatus, ultrasonic probe having the same, ultrasonic diagnostic apparatus, and controlling method thereof | |
| KR20150094518A (ko) | 초음파 진단 장치, 화상 처리 장치 및 화상 처리 방법 | |
| JP2007513672A (ja) | 2次元アレイトランスデューサを用いる立体的超音波画像化システム | |
| JP2012170467A (ja) | 超音波プローブおよび超音波診断装置 | |
| JP7167045B2 (ja) | 音響センサーを位置決めするためのロケーションデバイス及びシステム | |
| US20100056917A1 (en) | Ultrasonic diagnostic apparatus | |
| US10980517B2 (en) | Ultrasonic diagnostic apparatus for estimating position of probe and method for controlling the same | |
| US8905933B2 (en) | Ultrasonic diagnostic apparatus | |
| JP2005342194A (ja) | 超音波診断装置 | |
| JP2005169123A (ja) | 2次元配列変換器を用いた容積超音波結像システム | |
| JP2013244159A (ja) | 超音波診断装置及び音速推定方法 | |
| JP6595360B2 (ja) | 超音波撮像装置および超音波撮像方法 | |
| KR20150118732A (ko) | 초음파 장치 및 그 제어 방법 | |
| JP5390207B2 (ja) | 超音波診断装置および超音波診断装置の制御プログラム | |
| JP2010005138A (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210706 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210804 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6925815 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |