JP2017159262A - エマルションの製造方法および製造装置 - Google Patents
エマルションの製造方法および製造装置 Download PDFInfo
- Publication number
- JP2017159262A JP2017159262A JP2016047363A JP2016047363A JP2017159262A JP 2017159262 A JP2017159262 A JP 2017159262A JP 2016047363 A JP2016047363 A JP 2016047363A JP 2016047363 A JP2016047363 A JP 2016047363A JP 2017159262 A JP2017159262 A JP 2017159262A
- Authority
- JP
- Japan
- Prior art keywords
- emulsion
- rotation
- around
- axis
- rotation axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Mixers With Rotating Receptacles And Mixers With Vibration Mechanisms (AREA)
- Colloid Chemistry (AREA)
Abstract
【課題】撹拌羽根を用いずに、平均粒子径が小さく、かつ、粒度分布が狭いエマルションを得ることができる、エマルションの製造方法を提供することを目的とする。【解決手段】本発明のエマルションの製造方法は、内部に略球状または略楕円体状の空間Sを有する撹拌槽2にエマルションの原料を供給する工程と、撹拌槽2を、第1の回転軸Ax1周りに自転させるとともに、第1の回転軸Ax1に対して交差し、空間Sを通る方向に延びる第2の回転軸Ax2周りに歳差運動するように、回転させる工程とを備えることを特徴とする。【選択図】図1
Description
本発明は、エマルションの製造方法および製造装置に関する。さらに詳しくは、撹拌羽根を用いずに、エマルションを撹拌するエマルションの製造方法および製造装置に関する。
食品、化学工業薬品、医薬、化粧品などにエマルションが広く用いられている。このような様々な用途に用いられるエマルションは、平均粒子径が小さく、粒度分布が狭くなるように製造されることが好ましい。
エマルションの製造方法としては、たとえば、エマルションの原料に高いせん断力を加えることにより撹拌する撹拌装置が知られている。このような撹拌装置では、撹拌羽根を高速で回転させ、撹拌羽根により加えられる高いせん断力により、エマルションの平均粒子径を小さく、粒度分布が狭くなるように撹拌をしている。
また、撹拌装置として、特許文献1に示されるように、撹拌羽根を有しないものも知られている。この特許文献1の撹拌装置は、垂直軸(公転軸)周りに回転する回転体と、回転体の外周側に設けられ、回転体に対して回転する自転軸周りに回転する容器を備えている。この装置では、自転軸周りに回転する容器を、公転軸周りに回転させて、遠心力により、材料を高精度に混練する。
しかし、上述した撹拌羽根を用いる撹拌装置は、高いせん断力を容易に得ることができる一方で、撹拌羽根や撹拌槽の洗浄が煩雑である。
また、特許文献1のような遠心力を利用する撹拌装置は、遠心力を利用しているため、垂直軸周りに回転するステージの径を大きくする必要があり、撹拌装置が大型化するという問題がある。
また、上述したように、エマルションの撹拌は、エマルションの粒子を引きちぎるような強いせん断力が必要であり、ニュートン流体を混合する撹拌装置と基本的な撹拌原理が異なる。そのため、ニュートン流体の混合が可能な、上述した以外の撹拌装置を、単純にエマルションの撹拌に適用しても、得られる結果は予想できず、エマルションの平均粒子径を小さく、かつ、粒度分布を狭くすることは困難であると考えられている。
本発明は、かかる問題点に鑑みて、撹拌羽根を用いずに、平均粒子径が小さく、かつ、粒度分布が狭いエマルションを得ることができる、エマルションの製造方法および製造装置を提供することを目的とする。
本発明のエマルションの製造方法は、内部に略球状または略楕円体状の空間を有する撹拌槽にエマルションの原料を供給する工程と、前記撹拌槽を、第1の回転軸周りに自転させるとともに、前記第1の回転軸に対して交差し、前記空間を通る方向に延びる第2の回転軸周りに歳差運動するように、回転させる工程とを備えることを特徴とする。
また、前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Po(Ωp/Ωs)が、0.08〜0.4であることが好ましい。
また、前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Po(Ωp/Ωs)が、0.15〜0.4であることが好ましい。
また、前記第1の回転軸が、前記第2の回転軸に対して略垂直に延びていることが好ましい。
また、前記回転させる工程が、前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Poを、0.15〜0.4とするせん断工程と、前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Poを、0.08〜0.15とする混合工程とを備え、前記混合工程における比Poは、前記せん断工程における比Poよりも低く、前記せん断工程および前記混合工程が、前記第1の回転軸周りの自転の回転数Ωsおよび/または前記第2の回転軸周りの歳差運動の回転数Ωpを変化させることにより行われることが好ましい。
また、本発明のエマルションの製造装置は、内部に略球状または略楕円体状の空間を有する撹拌槽と、前記撹拌槽を第1の回転軸周りに自転できるように支持する支持体と、前記第1の回転軸に対して交差し、前記空間を通る方向に延びる第2の回転軸周りに前記撹拌槽が歳差運動するように、前記支持体を支持する第2の支持体と、前記第1の回転軸周りおよび前記第2の回転軸周りに前記撹拌槽を回転させる駆動力を生じさせる駆動部とを備えていることを特徴とする。
また、本発明のエマルションの製造装置は、前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Po(Ωp/Ωs)が、0.08〜0.4であることが好ましい。
また、本発明のエマルションの製造装置は、前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Po(Ωp/Ωs)が、0.15〜0.4であることが好ましい。
また、本発明のエマルションの製造装置は、前記第1の回転軸が、前記第2の回転軸に対して略垂直に延びていることが好ましい。
また、本発明のエマルションの製造装置は、前記製造装置が、前記駆動部を、前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Poを、0.15〜0.4とする第1のパターンと、前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Poを、0.08〜0.15とする第2のパターンとの間で、前記第1の回転軸周りの自転の回転数Ωsおよび/または前記第2の回転軸周りの歳差運動の回転数Ωpを変化させるように制御する制御装置を備え、前記第2のパターンにおける比Poは、前記第1のパターンにおける比Poよりも低いことが好ましい。
本発明によれば、撹拌羽根を用いずに、平均粒子径が小さく、かつ、粒度分布が狭いエマルションを得ることができる。
以下、図面を参照し、本発明の一実施形態のエマルションの製造装置および製造方法を詳細に説明する。まず、本発明の一実施形態のエマルションの製造装置の概略について、図1に示す概略図を用いて説明する。
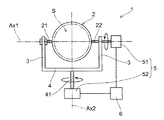
図1に示されるように、本実施形態のエマルションの製造装置1(以下、単に製造装置1という)は、内部に略球状または略楕円体状の空間Sを有する撹拌槽2と、撹拌槽2を第1の回転軸Ax1周りに自転できるように支持する支持体3と、第1の回転軸Ax1に対して交差し、空間Sを通る方向に延びる第2の回転軸Ax2周りに撹拌槽2が歳差運動するように、支持体3を支持する第2の支持体4とを備えている。
撹拌槽2は、撹拌対象となるエマルションが供給され、内部でエマルション原料が撹拌される容器である。撹拌槽2は、図1に示されるように、内部に略球状または略楕円体状の空間Sを有している。空間S内には、撹拌羽根は設けられておらず、中空の空間となっており、空間S内にエマルションが充填される。略球状または略楕円体状の空間Sは、空間Sを画定する撹拌槽2の内壁が、滑らかな曲面を形成している。撹拌槽2が内部に略球状または略楕円体状の空間Sを有し、表面が滑らかな曲面を形成するため、撹拌後の洗浄などが容易になる。また、撹拌槽2は、空間Sと撹拌槽2の外部の空間とが撹拌槽2の壁部により遮断されているため、撹拌中の異物混入を防ぐことができる。なお、本明細書において、略球状の空間は、真球である必要はなく、部材間の接合するためのわずかな突出部などによりわずかな凹凸を有するものも含み、空間Sが全体として球体に近い形状であればよい。また、略楕円体状の空間は、同様にわずかな突出部などによるわずかな凹凸を有するものも含み、回転楕円体のほか、断面が楕円に近い形状であればよく、ラグビーボール状の形状や、楕円体の両端を切断したような形状等も含んでいる。撹拌槽2は、たとえば、後述するように、分離および接合可能な第1の部分2aおよび第2の部分2b(図2参照)とから構成してもよく、この場合、洗浄時などに、球状の空間Sの内壁が露出し、洗浄が容易になる。
撹拌槽2の大きさは、エマルション原料の所望の処理量に応じて適宜変更が可能であり、その大きさは特に限定されない。また、撹拌槽2の外形は特に限定されず、撹拌槽2の外形は内部の空間Sと同様の形状であってもよいし、異なる形状としてもよい。たとえば、撹拌槽2の外形は、図2に示されるように筒状等であってもよい。
また、本実施形態の製造装置1は、撹拌槽2の外部に設けられた、または撹拌槽2に内蔵した加熱装置(図示せず)を設けても構わない。加熱装置は、撹拌槽2内で撹拌されるエマルションを加熱してエマルションの撹拌を促進するために用いられる。なお、加熱装置による加熱温度は特に限定されず、撹拌するエマルションに応じて適宜変更が可能である。また、撹拌槽2を構成する材料は特に限定されないが、加熱装置を用いる場合などは、熱伝導性が高い材料を用いることが好ましい。
撹拌槽2は、撹拌槽2の空間S内にエマルション原料を供給する供給部(図1においては図示せず)を備える。エマルションの原料を供給する供給部は、たとえば、第1の回転軸Axの一部を構成する軸部21を中空として、軸部21を供給部としてもよいし、撹拌槽2の外部と空間Sとを連通する接続ポート(供給部)を撹拌槽2に設け、エマルション原料の供給時に、供給部に図示しない供給管などを接続しても構わない。しかし、供給部は、撹拌槽2の内部にエマルションの原料を供給することができれば、撹拌槽2の任意の部位に設けることができる。
撹拌槽2の空間S内には、撹拌を開始する前にエマルションの原料が供給される。撹拌槽2の空間S内に供給されるエマルションの原料の量は特に限定されず、エマルション原料の量は後述する製造方法の効果に大きな影響を与えるものではないが、たとえば、空間Sの容積の50〜100%、好ましくは60〜100%、より好ましくは80〜100%とすることができる。
なお、本明細書において、エマルションとは、たとえば、(A)水及び油を乳化剤により分散させたもの、(B)高分子の粒子を乳化剤で分散させたものなどが挙げられる。エマルションの原料は、(A)の場合は、水、油及び乳化剤であり、(B)の場合は、高分子の単量体、重合開始剤、水及び乳化剤などとすることができる。
乳化剤としては、例えば、部分ケン化ポリビニルアルコール、完全ケン化ポリビニルアルコール、ヒドロキシエチルセルロース、メチルセルロース、カルボキシメチルセルロースなどの保護コロイド;ポリオキシエチレンアルキルエーテル、ポリオキシエチレンアルキルフェノールエーテル、ポリオキシエチレン・ポリオキシプロピレンブロックコポリマー、ポリオキシエチレン脂肪酸エステル、ポリオキシエチレンソルビタン脂肪酸エステルなどのノニオン系界面活性剤;アルキル硫酸エステル塩、アルキルベンゼンスルフォン酸塩、アルキルスルホコハク酸塩、アルキルジフェニルエーテルジスルフォン酸塩、ポリオキシエチレンアルキル硫酸塩、ポリオキシエチレンアルキルリン酸エステルなどのアニオン系界面活性剤;アルキルアンモニウム塩、アルキルベンジルアンモニウム塩、ベタイン、イミダゾリウムベタイン、レシチンなどのカチオン系界面活性剤などが挙げられる。乳化剤の使用量は、エマルションの安定性などの観点から、通常使用する水100重量部に対して0.01〜20重量部程度であり、乳化剤が界面活性剤の場合は0.01〜10重量部程度、保護コロイドの場合は、0.1〜20重量部程度である。
上記(A)の場合に、エマルションの原料として用いられる油は、乳化剤によって水に分散させ得る液体の有機化合物であり、例えば、ベンゼン、トルエンなどの芳香族炭化水素やパラフィンなどの炭化水素、長鎖脂肪酸のアルキルエステル、脂肪酸とグリセリンとのエステルなどの脂肪酸エステルなどが挙げられる。医農薬品や化粧品などの場合には、例えば、有効成分が結晶であっても油に溶解させてエマルションを製造することができ、本発明の製造方法によって有効成分をエマルション粒子に含有するエマルションが製造できる。
上記(B)のエマルションの場合、エマルション原料とは、高分子の単量体、重合開始剤、水及び乳化剤などである。医農薬品や化粧品などの場合には、例えば、有効成分が溶液状であっても、有効成分をエマルション原料として用い、合成される高分子に吸着あるいは包含されながら該高分子とともに水中に分散されて、有効成分を含むエマルションを製造することができる。
上記(B)のエマルション粒子が付加重合体である場合、エマルションの原料としては、例えば、エチレン、プロピレンなどのポリオレフィン;酢酸ビニル、バーサチック酸ビニルなどのビニルエステル;スチレン、塩化ビニルなどのビニルエステル以外のビニル化合物;アクリル酸、アクリル酸エステル、メタクリル酸、メタクリル酸エステルなどのα,β−不飽和カルボン酸類等の付加重合し得る単量体などが例示される。
また、上記(B)のエマルション粒子がポリウレタンである場合、エマルションの原料としては、ポリイソシアネート化合物とポリオール化合物などが挙げられる。ポリイソシアネート化合物としては、分子内にイソシアネート基及び/又はそのアダクト体が複数有する化合物であり、例えば、1,4−テトラメチレンジイソシアネート、1,6−ヘキサメチレンジイソシアネート、2,2,4−トリメチルヘキサメチレンジイソシアネート、3−イソシアネートメチル−3,5,5−トリメチルシクロヘキシルイソシアネート、ジシクロヘキシルメタン−4,4′−ジイソシアネート、メチルシクロヘキシル−2,4−ジイソシアネート、メチルシクロヘキシル−2,6−ジイソシアネート、キシリレンジイソシアネート、1,3−ビス(イソシアネート)メチルシクロヘキサン、テトラメチルキシリレンジイソシアネート、トランスシクロヘキサン−1,4−ジイソシアネート、リジンジイソシアネート等の脂肪族ジイソシアネート類;2,4−トルイレンジイソシアネート、2,6−トルイレンジイソシアネート、ジフェニルメタン−4,4′−ジイソシアネート、1,5′−ナフテンジイソシアネート、トリジンジイソシアネート、ジフェニルメチルメタンジイソシアネート、テトラアルキルジフェニルメタンジイソシアネート、4,4′−ジベンジルジイソシアネート、1,3−フェニレンジイソシアネート等の芳香族ジイソシアネート類;リジンエステルトリイソシアネート、トリフェニルメタントリイソシアネート、1,6,11−ウンデカントリイソシアネート、1,8−イソシアネート−4,4−イソシアネートメチルオクタン、1,3,6−ヘキサメチレントリイソシアネート、ビシクロヘプタントリイソシアネート、トリメチロールプロパンとトルイレンジイソシアネートとのアダクト体、トリメチロールプロパンと1,6−ヘキサメチレンジイソシアネートとのアダクト体等のトリイソシアネート類などの付加重合し得る単量体などが挙げられる。
ポリオール化合物としては、分子内に水酸基を2個以上有する化合物であり、例えば、エチレングリコール、ジエチレングリコール、プロピレングリコール、1,4−ブタンジオール、1,6−ヘキサンジオール、ネオペンチルグリコール、トリメチロールプロパン、グリセリン等の多価アルコール類;ポリエチレングリコール、ポリプロピレングリコール、ポリテトラメチレンエーテルグリコール等のポリエーテルポリオール類;アジピン酸、セバシン酸、イタコン酸、無水マレイン酸、テレフタル酸、イソフタル酸、フマル酸、コハク酸、シュウ酸、マロン酸、グルタル酸、ピメリン酸、スベリン酸、アゼライン酸等のジカルボン酸類と、エチレングリコール、ジエチレングリコール、プロピレングリコール、1,4−ブタンジオール、1,6−ヘキサンジオール、ネオペンチルグリコール、1,2−プロパンジオール、1,3−プロパンジオール、1,9−ノナンジオール、3−メチル−1,5−ペンタンジオール、1,3−プロパンジオール、トリプロピレングリコール、トリメチロールプロパン、グリセリン等のポリオール化合物とから得られるポリエステルポリオール類;ポリカプロラクトンポリオール、ポリβ−メチル−δ−バレロラクトン等のポリラクトン系ポリエステルポリオール類;ポリブタジエンポリオール又はその水添物、ポリカーボネートポリオール、ポリチオエーテルポリオール、ポリアクリル酸エステルポリオールなどが挙げられる。
再び図1に戻って、本実施形態のエマルションの製造装置1は、撹拌槽2が、支持体3に第1の回転軸(自転軸)Ax1周りに回転できるように支持されている。支持体3は、撹拌槽2を第1の回転軸Ax1周りに回転できるように支持できるものであれば、特にその形状や構造は限定されない。本実施形態では、支持体3は第1の回転軸Ax1に沿う方向の両側に一対設けられた板状または柱状の部材であり、撹拌槽2を、軸部21、22を介して回転可能に支持している。
支持体3は、図1に示されるように、撹拌槽2を支持した状態で、第2の支持体4に一体に形成されるか、別体として取り付けられる。第2の支持体4は、後述する駆動部5により、第2の回転軸Ax2周りに回転する。したがって、第2の支持体4が第2の回転軸Ax2周りに回転すると、それに伴い支持体3が第2の支持体4と一体的に回転する。これにより、撹拌槽2は、第1の回転軸Ax1周りに支持体3に対して回転するとともに、第2の回転軸Ax2周りに回転し、歳差運動を行う。第2の支持体4は、撹拌槽2を第2の回転軸Ax2周りに回転させることができれば、特にその形状や構造は限定されない。第2の支持体4は、第1の回転軸Ax1に略平行に設けられた板状の部材とすることができ、たとえば、第2の支持体4をターンテーブルのような矩形板状または円盤状とし、後述する駆動部5や制御装置6を第2の支持体4上に載置してもよい。また、本実施形態では、第2の支持体4から略垂直方向に支持体3が延びているが、第2の支持体4と支持体3との間の角度は特に限定されない。
図1においては、第1の回転軸Ax1は水平方向に延び、水平面内で第1の回転軸Ax1が回転するように構成されているが、第1の回転軸Ax1が延びる方向は特に限定されず、後述する実施形態のように、鉛直面内(または水平面や鉛直面に対して傾斜した面内)を回転するものであってもよい。また、第2の回転軸Ax2は、図1においては鉛直方向に延びているが、第1の回転軸Ax1に交差し、空間Sを通る方向に延びていれば、水平方向等、他の方向に延びていてもよい。また、第1の回転軸Ax1と第2の回転軸Ax2とは、図1に示されるように略垂直に交差することが好ましいが、第1の回転軸Ax1と第2の回転軸Ax2とがなす角θは、たとえば、60°≦θ≦120°の範囲で傾斜して交差していてもよい。なお、後述する回転数比Poは、第1の回転軸Ax1と第2の回転軸Ax2とが略垂直な状態からわずかに傾斜している場合、たとえば、回転数比Poに1/sinθを乗じて計算してもよい。なお、本実施形態では、第1の回転軸Ax1は、図1に示されるように、軸部21、22により形成され、軸部21、22が後述する駆動部5により駆動されて回転することにより、撹拌槽2が第1の回転軸Ax1周りに回転する。第2の回転軸Ax2は、図1に示されるように、軸部41により形成され、軸部41が後述する駆動部5により駆動されて回転することにより、撹拌槽2が第2の回転軸Ax2周りに回転する。なお、軸部21、22は、たとえば、支持体3に軸受などにより回転可能に取り付けられ、軸部41は、第2の支持体4に一体的に固定されている。
また、エマルションの製造装置1は、図1に示されるように、撹拌槽2を駆動する駆動部5を有している。駆動部5はたとえばモータ等の駆動源を有し、駆動源から得られた動力により、撹拌槽2を第1の回転軸Ax1および第2の回転軸Ax2周りに回転させる。駆動部5は、たとえば外部電源などの電源から給電されて駆動される。図1では、駆動部5は第1の回転軸Ax1を中心として撹拌槽2を回転させる第1の駆動部51と、第2の回転軸Ax2を中心として撹拌槽2を回転させる第2の駆動部52とを備えている。なお、後述する実施形態に示されるように、駆動部を2つ設けずに1つとすることもでき、1つの駆動部と、駆動部の動力を伝達し、第2の回転軸Ax2周りの回転力を第1の回転軸Ax1周りの回転力に変換する動力伝達機構9(図2参照)とによって、撹拌槽2を第1の回転軸Ax1周りと、第2の回転軸Ax2周りに回転させるように構成してもよい。なお、この点については後述する。
駆動部5は、撹拌槽2を、第1の回転軸Ax1および第2の回転軸Ax2のそれぞれの周りを、それぞれ所定の回転数で回転させるように設定される。たとえば、2つの駆動部51、52を用いる場合は、それぞれの駆動部51、52は個々に回転数が設定され、1つの駆動部5を用いる場合は、動力伝達機構9を所望の変速比となるように構成する。第1の回転軸Ax1周りの回転数Ωsは、特に限定されないが、たとえば、500〜5000rpm、より好ましくは2000〜3000rpmとすることができる。第1の回転軸Ax1の回転数Ωsを2000〜3000rpmとすることにより、消費電力をそれほど増大させることなく、エマルションの撹拌時間を短くすることができ、得られるエマルションの平均粒径を小さくすることができる。第2の回転軸Ax2周りの回転数は、後述する回転数比Poを満たすように適宜設定される。
本実施形態の製造装置1は、第1の回転軸Ax1周りの自転の回転数Ωsと、第2の回転軸Ax2周りの歳差運動の回転数Ωpとの回転数比Po(Ωp/Ωs)が所定の範囲となるように構成され、撹拌槽2の空間S内に旋回流や乱流を生じさせて、エマルション原料にせん断力を加えてエマルションを生成する。第1の回転軸Ax1周りの自転の回転数Ωsと、第2の回転軸Ax2周りの歳差運動の回転数Ωpとの回転数比Poは、特に限定されないが、たとえば、0.08〜0.4であることが好ましい。回転数比Poが0.08以上の場合、空間S内のエマルション原料の流れと撹拌槽2の空間Sを画定する撹拌槽2の内壁との間でせん断力を高めることができ、回転数比が0.08より小さい場合、せん断力およびエマルションの混合が低下する傾向にある。また、回転数比Poが0.4以下であることにより、製造装置1の消費電力を低減することができる。また、回転数比Poは、0.15〜0.4であることがより好ましい。回転数比Poを0.15〜0.4とすることにより、せん断力が高く、かつ、空間S内のエマルション原料の混合も促進され、良質なエマルションを製造することができる。なお、所望の回転数比Poは、たとえば図1における、駆動部51および駆動部52それぞれの回転数を設定することや、上述した1つの駆動部の場合は動力伝達機構9の変速比を調整することなどにより得ることができる。
また、製造装置1は、図1に示されるように、回転数比Poを制御する制御装置6を備えていてもよい。制御装置6は、製造装置1の駆動に関する各種制御を行うことができる。たとえば、制御装置6は、撹拌工程の進行に応じて、回転数Ωs、Ωpの値の変更や、駆動部5のモータ等を正逆回転させたり、2つある駆動部51、52の少なくとも一方を、起動または停止させることができる。制御装置6は、有線または無線により駆動部5(駆動部51、52)に接続され、駆動部5を制御する。制御装置6は、歳差運動の際の撹拌槽2の回転時に駆動部5との間の接続に問題がなければ1つとしてもよいし、駆動部51、52のそれぞれに1つずつ制御装置を設けてもよい。たとえば、図1では模式的に1つの制御装置6を示しているが、たとえば、ターンテーブル状の支持体4上に1つの制御装置を設けて、一方の駆動部51に接続し、他方の駆動部52側にもう1つの制御装置を設けて、他方の駆動部52に接続してもよい。
つぎに、本実施形態のエマルションの製造方法について説明する。
まず、撹拌槽2の空間S内にエマルション原料を供給する。エマルション原料は、上述したように、たとえば、中空に形成された軸部21や、撹拌槽2の外部に設けられた供給ポートなどの供給部から空間S内に供給することができる。
エマルション原料が撹拌槽2の空間S内に充填されると、エマルション原料の供給を停止する。エマルション原料が、撹拌槽2の空間S内に供給されると、つぎに、第1の回転軸Ax1および第2の回転軸Ax2周りに撹拌槽2を回転させて、撹拌槽2の歳差運動を生じさせる。より具体的には、駆動部51のモータを駆動させると、軸部21、22および撹拌槽2が第1の回転軸Ax1周りに回転する。一方、駆動部52のモータを駆動させると、軸部41および第2の支持体4が第2の回転軸Ax2周りに回転する。第2の支持体4が回転すると、第2の支持体4と支持体3とが一体的に第2の回転軸Ax2周りに回転し、撹拌槽2は、第1および第2の回転軸Ax1、Ax2周りに回転する。このとき、空間S内では、撹拌槽2の歳差運動と、撹拌槽2の略球状または略楕円体状の空間Sの形状により、エマルション原料に旋回流(または乱流)が生みだされる。本発明では、この歳差運動と空間Sの形状によってエマルション原料の旋回流を生じさせ、自転する(第1の回転軸Ax1周りに回転する)撹拌槽2と旋回流との間で、撹拌槽2の内壁近傍でせん断力を生じさせる。このように、本発明者らは、撹拌羽根などの物理的にせん断力を生じさせる部材を用いずに、撹拌槽2を所定の形状にして、撹拌槽2を歳差運動させることにより、エマルション原料にせん断力を生じさせ、エマルション原料の撹拌が可能であることを見出したのである。
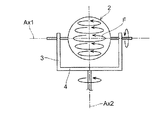
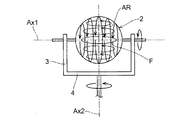
また、本発明者らは、第1の回転軸Ax1周りの自転の回転数Ωsと、第2の回転軸Ax2周りの歳差運動の回転数Ωpとの回転数比Poを、所定の範囲、たとえば0.08〜0.4とすることにより、よりせん断力とせん断後のエマルション粒子の混合を促進させることができることを見出した。図3は回転数比Poが0.02のとき、図4は回転数比Poが0.09のとき、図5は回転数比Poが0.3のときの、球状の空間S内におけるエマルションの全体的な流れを実験した結果をそれぞれ模式的に示した図である。図3に示されるように、エマルション原料の流れFは、第1の回転軸Ax1からわずかに傾斜した軸周りに流れる旋回流となっているが、回転数比が0.08以上の場合、たとえば回転数比が0.09のときには、図4に示されるように、エマルション原料の流れFが第1の回転軸Ax1に対してより傾斜した複雑な流れを生み出した(図4では模式的に簡素化して示しているが、実際は図に示した状態よりもさらに複雑な乱流が生じていた)。そのため、自転する撹拌槽2の内壁近傍でのせん断力が向上し、複雑な流れによるエマルション原料の混合も促進され、良質なエマルションを製造することが可能となることがわかった。また、回転数比Poを、たとえば、0.15〜0.4(たとえば回転数比Poを0.3)とすることにより、エマルション原料の流れFが第2の回転軸Ax2周りの旋回に近い形となり、エマルションの製造に重要なせん断力をより高めることができることを見出した。具体的には、回転数比Poを0.15〜0.4とすることにより、図6に示されるように、エマルション原料の流れFが、第2の回転軸Ax2周りまたはそれに近い角度の軸周りに旋回し、自転する撹拌槽2の空間Sの内壁は、図6に矢印ARで示されるように回転する。このような旋回流を生じさせることにより、第2の回転軸Ax2周りの旋回流と、撹拌槽2の自転の方向とが、垂直に近い形で交差し、よりエマルション原料へのせん断力を高めることができる。これにより、より良質なエマルションを製造することができる。
エマルションの撹拌が完了すると、撹拌が完了したエマルションを空間Sから排出して、エマルションの製造工程が完了する。エマルションの排出は、例えば供給側となる軸部21とは反対側の軸部22内に排出路を設けたり、撹拌槽2の側面に排出路を設けたりしてもよい。
エマルションの製造工程が完了すると、撹拌槽2の内部の洗浄を行う。本実施形態では、撹拌槽2の内部は滑らかに湾曲した形状に形成されているため、空間Sの表面の洗浄が非常に容易になる。さらに、製造装置1には撹拌羽根が設けられていないため、従来行われていた、複雑な凹凸形状を有する撹拌羽根の洗浄工程といった時間のかかる作業を行う必要がない。したがって、次の撹拌工程までの時間を大幅に短縮することができる。
つぎに、上述した実施形態と異なる他の実施形態の製造装置11について図2を用いて説明する。なお、以下に説明する製造装置11は、第1の回転軸Ax1、第2の回転軸Ax2が延びる方向と、駆動部5の数が図1に示した実施形態と異なっているが、撹拌原理は基本的に図1で説明した製造装置1と同様であり、相違点を中心に説明する。
図2に示される実施形態の製造装置11は、第2の回転軸Ax2が水平方向に延びており、第1の回転軸Ax1が第2の回転軸Ax2に垂直な面内を回転するように構成され、撹拌槽2が歳差運動を行うように構成されている。撹拌槽2は、図2では外形が略筒状に形成されているが、撹拌槽2の内部には略球状または略楕円体状の空間Sが形成されている。撹拌槽2は、本実施形態では、軸部21側の第1の部分2aと軸部22側の第2の部分2bとから構成され、2つの部材が接合されて、撹拌槽2が形成されている。撹拌槽2は洗浄時などに分離されることにより、撹拌槽2の内部の洗浄を容易に行うことができる。
本実施形態では、支持体3および第2の支持体4はそれぞれ一対設けられており、支持体3および第2の支持体4により、撹拌槽2を取り囲む矩形枠状の支持部材SPを形成している。第2の支持体4は、基台7上に垂直方向に立設された一対の支柱8に対して回転可能に取り付けられている。第2の支持体4は、支柱8に対して軸支されており、駆動部5により生じる駆動力により、第2の支持体4が回転し、枠状の支持部材SPが第2の回転軸Ax2周りに回転する。
なお、本実施形態では、駆動部5は、モータ5aと、モータ5aの出力軸に接続されて回転するプーリやベルトを備えた伝動部5bとを備えたものを一例として示しているが、駆動部5の駆動機構は図示するものに限定されるものではなく、第2の回転軸Ax2を回転させることが可能であれば、他の機構を用いても構わない。
また、本実施形態では、第2の回転軸Ax2は、駆動部5の動力が伝達される駆動軸部41と、駆動軸部41と同軸に伸び、駆動軸部41の回転に伴い回転する従動軸部42とを備えている。軸部41、42は、支柱8にベアリングなどを介して接続されている。また、本実施形態では、図2に示されるように、第2の回転軸Ax2上に設けられた軸部42と、第1の回転軸Ax1上に設けられた軸部22との間に、第2の回転軸Ax2周りの回転力を第1の回転軸Ax1周りの回転力に変換する動力伝達機構9を有している。
動力伝達機構9は、連結された支持体3と第2の支持体4との間に、第2の回転軸Ax2周りの回転力を、第1の回転軸Ax1周りの回転力に変換するために、動力の伝達方向を第2の回転軸Ax2の延在方向から、第1の回転軸Ax1の延在方向へと変換する伝達方向変換機構91を有している。伝達方向変換機構91は、本実施形態ではギヤ機構が用いられ、第2の支持体4側に設けられた第1のギヤ91aと、第1のギヤ91aと噛み合い、支持体3側に設けられた第2のギヤ91bとを備えている。本実施形態では第1のギヤ91aおよび第2のギヤ91bとして、傘歯車が用いられているが、伝達方向の変更が可能であれば、ウォームギヤなど、他のギヤ機構を用いてもよい。
また、本実施形態では、動力伝達機構9は、第2の支持体4側から支持体3側に向かって伝達方向変換機構91が所定の増速比で動力を伝達するように構成されるか、または、伝達方向変換機構91に加えて別途増速機構を備えていてもよい。本実施形態では、伝達方向変換機構91が所定の増速比で動力を伝達するように構成されるとともに、第2の支持体4および支持体3にそれぞれ増速機構92、93を備えている。より具体的には、本実施形態では、増速機構92は、支柱8に対して固定された第1プーリ92aと、第1プーリ92aより小径で、タイミングベルト92bにより第1プーリ92aと接続された第2プーリ92cとを備え、第2プーリ92cの回転に応じて傘歯車である第1のギヤ91aが回転するように構成されている。また、増速機構93は、傘歯車である第2のギヤ91bの回転に応じて回転する大径の第3プーリ93aと、第3プーリ93aより小径で、タイミングベルト93bにより第3プーリ93aと接続された第4プーリ93cとを備えている。第4プーリ93cは、第1の回転軸Ax1周りに回転する。これにより、本実施形態では、増速機構92、93および歯数の異なる第1のギヤ91a、91bにより、第1の回転軸Ax1周りの回転数が第2の回転軸Ax2周りの回転数に対して増速される。
上述した構成はあくまで一例であるが、本実施形態のように第2の回転軸Ax2周りの回転力を第1の回転軸Ax1の回転力に変換する動力伝達機構9が設けられていることにより、単一の駆動部5を用いて、撹拌槽2を第1の回転軸Ax1および第2の回転軸Ax2周りに回転させることが可能となる。また、このように単一の駆動部5により撹拌槽2を回転させることにより、装置全体を小型化することができる。また、単一の駆動部5を用いて撹拌槽2を第1および第2の回転軸Ax1、Ax2周りに回転させる場合、回転数比が上がってくると(たとえば、回転数比が0.2〜0.4の場合など)、ジャイロ効果が弱まり、撹拌槽2を回転させるのに必要なトルクがそれほど大きくならず、装置を駆動する際の消費電力を抑えることができ、作動効率が向上する。
なお、本実施形態では、軸部42と、軸部22との間に動力伝達機構9が設けられているが、動力の伝達に用いられる軸部は、他方の軸部41や軸部21であってもよい。また、動力伝達機構9の出力側(軸部22側)に、制御装置により制御可能な変速機構をさらに設けてもよい。これにより、第1の回転軸Ax1周りの回転数を増減させることができ、撹拌中に回転数比Poを増減させてエマルションの撹拌を促進させることができる。
以下、実施例を挙げて、本発明を説明するが、本発明は実施例によって限定されるものではない。
まず、実施例および比較例において共通で使用した製造装置およびエマルション原料について説明する。
<製造装置>
製造装置は、図1において示した製造装置1と同様の構成の装置を用いた。具体的には製造装置は、鉛直軸(第2の回転軸Ax2)周りに回転するターンテーブル(第2の支持体4)を回転させ、ターンテーブルに対して垂直方向に対向する一対の板(支持体3)を設けて、一対の板に回転可能に設けられた水平軸(第1の回転軸Ax1)で撹拌槽を支持した。鉛直軸と水平軸とはそれぞれ別々のモータにより異なる回転数で回転できるようにし、表1に示す自転回転数、回転数比Po(Ωp/Ωs)で回転させた。撹拌槽は、2つの半球状の凹部を有する部材を接合することにより、撹拌槽内部に直径50mmの球状の空間が形成されるようにした。なお、比較例については、鉛直軸周りの回転はさせずに、水平軸周りの回転のみとした。
製造装置は、図1において示した製造装置1と同様の構成の装置を用いた。具体的には製造装置は、鉛直軸(第2の回転軸Ax2)周りに回転するターンテーブル(第2の支持体4)を回転させ、ターンテーブルに対して垂直方向に対向する一対の板(支持体3)を設けて、一対の板に回転可能に設けられた水平軸(第1の回転軸Ax1)で撹拌槽を支持した。鉛直軸と水平軸とはそれぞれ別々のモータにより異なる回転数で回転できるようにし、表1に示す自転回転数、回転数比Po(Ωp/Ωs)で回転させた。撹拌槽は、2つの半球状の凹部を有する部材を接合することにより、撹拌槽内部に直径50mmの球状の空間が形成されるようにした。なお、比較例については、鉛直軸周りの回転はさせずに、水平軸周りの回転のみとした。
<エマルション原料>
用いたエマルション原料は、純水、油として流動パラフィン、界面活性剤としてポリオキシエチレンソルビタンモノオレアート(製品名、Tween80、東京化成工業株式会社製)およびソルビタンモノオレアート(商品名span80、関東化学株式会社製)を用い、純水、流動パラフィン、Tween80およびspan80をそれぞれ、71重量%、25重量%、2重量%、2重量%となるように撹拌槽に充填した。界面活性剤であるTween80およびspan80を、純水および流動パラフィンに加熱しながら良く溶かし、乳化時の温度が70℃となるように温度調整を行った。
用いたエマルション原料は、純水、油として流動パラフィン、界面活性剤としてポリオキシエチレンソルビタンモノオレアート(製品名、Tween80、東京化成工業株式会社製)およびソルビタンモノオレアート(商品名span80、関東化学株式会社製)を用い、純水、流動パラフィン、Tween80およびspan80をそれぞれ、71重量%、25重量%、2重量%、2重量%となるように撹拌槽に充填した。界面活性剤であるTween80およびspan80を、純水および流動パラフィンに加熱しながら良く溶かし、乳化時の温度が70℃となるように温度調整を行った。
上述した装置を用いて、表1に示される条件のもと、製造装置を60秒駆動した直後に、スポイトにより撹拌槽の上部側から少量の試料を取り出し、レーザー回折式粒度分布測定装置(製品名マイクロトラックMT3300、日機装株式会社製)により平均粒子径を測定した。その結果を表1に示す。

表1から、歳差運動をしていない比較例と比較して、いずれの実施例においても、平均粒径が小さくなっており、エマルション原料にせん断力が加わって、良質なエマルションが得られることがわかった。また、実施例2および3から理解できるように、回転数比を上げることにより、より高いせん断力が得られ、エマルション原料の撹拌により適していることがわかった。
1、11 製造装置
2 撹拌槽
21、22 軸部
2a 第1の部分
2b 第2の部分
3 支持体
4 第2の支持体
41、42 軸部
5、51、52 駆動部
5a モータ
5b 伝動部
6 制御装置
7 基台
8 支柱
9 動力伝達機構
91 伝達方向変換機構
91a 第1のギヤ
91b 第2のギヤ
92 増速機構
92a 第1プーリ
92b タイミングベルト
92c 第2プーリ
93 増速機構
93a 第3プーリ
93b タイミングベルト
93c 第4プーリ
Ax1 第1の回転軸
Ax2 第2の回転軸
F エマルション原料の流れ
S 空間
SP 枠状の支持部材
2 撹拌槽
21、22 軸部
2a 第1の部分
2b 第2の部分
3 支持体
4 第2の支持体
41、42 軸部
5、51、52 駆動部
5a モータ
5b 伝動部
6 制御装置
7 基台
8 支柱
9 動力伝達機構
91 伝達方向変換機構
91a 第1のギヤ
91b 第2のギヤ
92 増速機構
92a 第1プーリ
92b タイミングベルト
92c 第2プーリ
93 増速機構
93a 第3プーリ
93b タイミングベルト
93c 第4プーリ
Ax1 第1の回転軸
Ax2 第2の回転軸
F エマルション原料の流れ
S 空間
SP 枠状の支持部材
Claims (10)
- 内部に略球状または略楕円体状の空間を有する撹拌槽にエマルションの原料を供給する工程と、
前記撹拌槽を、第1の回転軸周りに自転させるとともに、前記第1の回転軸に対して交差し、前記空間を通る方向に延びる第2の回転軸周りに歳差運動するように、回転させる工程と
を備えた、エマルションの製造方法。 - 前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Po(Ωp/Ωs)が、0.08〜0.4であることを特徴とするエマルションの製造方法。
- 前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Po(Ωp/Ωs)が、0.15〜0.4である請求項1記載のエマルションの製造方法。
- 前記第1の回転軸が、前記第2の回転軸に対して略垂直に延びている請求項1〜3のいずれか1項に記載のエマルションの製造方法。
- 前記回転させる工程が、
前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Poを、0.15〜0.4とするせん断工程と、
前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Poを、0.08〜0.15とする混合工程と
を備え、
前記混合工程における比Poは、前記せん断工程における比Poよりも低く、
前記せん断工程および前記混合工程が、前記第1の回転軸周りの自転の回転数Ωsおよび/または前記第2の回転軸周りの歳差運動の回転数Ωpを変化させることにより行われる請求項1〜4のいずれか1項に記載のエマルションの製造方法。 - 内部に略球状または略楕円体状の空間を有する撹拌槽と、
前記撹拌槽を第1の回転軸周りに自転できるように支持する支持体と、
前記第1の回転軸に対して交差し、前記空間を通る方向に延びる第2の回転軸周りに前記撹拌槽が歳差運動するように、前記支持体を支持する第2の支持体と、
前記第1の回転軸周りおよび前記第2の回転軸周りに前記撹拌槽を回転させる駆動力を生じさせる駆動部と
を備えた、エマルションの製造装置。 - 前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Po(Ωp/Ωs)が、0.08〜0.4である請求項6記載のエマルションの製造装置。
- 前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Po(Ωp/Ωs)が、0.15〜0.4である請求項6記載のエマルションの製造装置。
- 前記第1の回転軸が、前記第2の回転軸に対して略垂直に延びている請求項6〜8のいずれか1項に記載のエマルションの製造装置。
- 前記製造装置が、前記駆動部を、
前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Poを、0.15〜0.4とする第1のパターンと、
前記第1の回転軸周りの自転の回転数Ωsと、前記第2の回転軸周りの歳差運動の回転数Ωpとの比Poを、0.08〜0.15とする第2のパターンと
の間で、前記第1の回転軸周りの自転の回転数Ωsおよび/または前記第2の回転軸周りの歳差運動の回転数Ωpを変化させるように制御する制御装置を備え、
前記第2のパターンにおける比Poは、前記第1のパターンにおける比Poよりも低い請求項6〜9のいずれか1項に記載のエマルションの製造装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016047363A JP2017159262A (ja) | 2016-03-10 | 2016-03-10 | エマルションの製造方法および製造装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016047363A JP2017159262A (ja) | 2016-03-10 | 2016-03-10 | エマルションの製造方法および製造装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017159262A true JP2017159262A (ja) | 2017-09-14 |
Family
ID=59854448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016047363A Pending JP2017159262A (ja) | 2016-03-10 | 2016-03-10 | エマルションの製造方法および製造装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017159262A (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107638861A (zh) * | 2017-10-20 | 2018-01-30 | 开平市兴丰投资有限公司 | 一种可转动的反应釜 |
| CN107684892A (zh) * | 2017-10-20 | 2018-02-13 | 开平市兴丰投资有限公司 | 一种移动式反应釜 |
| CN107694497A (zh) * | 2017-10-20 | 2018-02-16 | 开平市兴丰投资有限公司 | 一种便于清洗的反应釜 |
| CN107824136A (zh) * | 2017-10-20 | 2018-03-23 | 开平市兴丰投资有限公司 | 一种反应釜 |
| JP6777299B1 (ja) * | 2020-01-29 | 2020-10-28 | 株式会社ナガオシステム | 粉砕方法および混合方法 |
| KR20210094442A (ko) * | 2020-01-21 | 2021-07-29 | 이은성 | 볼밀 장치 |
| JP2022040084A (ja) * | 2020-08-28 | 2022-03-10 | 国立大学法人大阪大学 | 攪拌方法、攪拌装置、および攪拌容器 |
| WO2022075473A1 (ja) * | 2020-10-09 | 2022-04-14 | 三菱マテリアル株式会社 | 回転装置および微粒子作製方法 |
| JP2022063167A (ja) * | 2020-10-09 | 2022-04-21 | 株式会社ナガオシステム | 容器、回転装置および微粒子作製方法 |
| JP2022083314A (ja) * | 2020-11-24 | 2022-06-03 | 株式会社ナガオシステム | 回転装置および微粒子作製方法 |
| KR20220170246A (ko) * | 2021-06-22 | 2022-12-29 | 구본준 | 3d 볼밀의 구동 장치 |
| EP4094837A4 (en) * | 2020-01-21 | 2024-02-28 | Eun Sung Lee | BALL MILL DEVICE |
| JP2024086502A (ja) * | 2022-12-17 | 2024-06-27 | 株式会社オートニクス | 血液検体中の凝集物判定装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS356848B1 (ja) * | 1958-10-08 | 1960-09-06 | ||
| JPS62211596A (ja) * | 1986-03-12 | 1987-09-17 | 株式会社日立製作所 | 放射性廃棄物固化処理方法および放射性廃棄物固化処理用転動機 |
| JPH10235178A (ja) * | 1997-02-21 | 1998-09-08 | Eurotec:Kk | 混合装置 |
| JPH10323551A (ja) * | 1997-05-26 | 1998-12-08 | Mori Mach Kk | 粉粒体混合機 |
| JP2000334286A (ja) * | 1999-05-26 | 2000-12-05 | Bridgestone Corp | 粉粒体混合装置 |
| JP2012176331A (ja) * | 2009-06-27 | 2012-09-13 | Nagao System:Kk | 三次元回転機構及びそれを備えたボールミル及び混練装置 |
| JP2013198851A (ja) * | 2012-03-23 | 2013-10-03 | Ikutoku Gakuen | 混合攪拌装置および方法 |
| JP3190993U (ja) * | 2014-03-20 | 2014-06-05 | 正裕 岩永 | 混合攪拌装置 |
-
2016
- 2016-03-10 JP JP2016047363A patent/JP2017159262A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS356848B1 (ja) * | 1958-10-08 | 1960-09-06 | ||
| JPS62211596A (ja) * | 1986-03-12 | 1987-09-17 | 株式会社日立製作所 | 放射性廃棄物固化処理方法および放射性廃棄物固化処理用転動機 |
| JPH10235178A (ja) * | 1997-02-21 | 1998-09-08 | Eurotec:Kk | 混合装置 |
| JPH10323551A (ja) * | 1997-05-26 | 1998-12-08 | Mori Mach Kk | 粉粒体混合機 |
| JP2000334286A (ja) * | 1999-05-26 | 2000-12-05 | Bridgestone Corp | 粉粒体混合装置 |
| JP2012176331A (ja) * | 2009-06-27 | 2012-09-13 | Nagao System:Kk | 三次元回転機構及びそれを備えたボールミル及び混練装置 |
| JP2013198851A (ja) * | 2012-03-23 | 2013-10-03 | Ikutoku Gakuen | 混合攪拌装置および方法 |
| JP3190993U (ja) * | 2014-03-20 | 2014-06-05 | 正裕 岩永 | 混合攪拌装置 |
Non-Patent Citations (1)
| Title |
|---|
| 岩永正裕: "コリオリ力を用いた攪拌・混合・洗濯装置の開発", 日本機械学会論文集, vol. 79巻/807号, JPN6017046180, November 2013 (2013-11-01), pages 2456 - 2466, ISSN: 0003701346 * |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107638861A (zh) * | 2017-10-20 | 2018-01-30 | 开平市兴丰投资有限公司 | 一种可转动的反应釜 |
| CN107684892A (zh) * | 2017-10-20 | 2018-02-13 | 开平市兴丰投资有限公司 | 一种移动式反应釜 |
| CN107694497A (zh) * | 2017-10-20 | 2018-02-16 | 开平市兴丰投资有限公司 | 一种便于清洗的反应釜 |
| CN107824136A (zh) * | 2017-10-20 | 2018-03-23 | 开平市兴丰投资有限公司 | 一种反应釜 |
| KR102403370B1 (ko) * | 2020-01-21 | 2022-05-30 | 이은성 | 볼밀 장치 |
| KR20210094442A (ko) * | 2020-01-21 | 2021-07-29 | 이은성 | 볼밀 장치 |
| EP4094837A4 (en) * | 2020-01-21 | 2024-02-28 | Eun Sung Lee | BALL MILL DEVICE |
| WO2021152725A1 (ja) * | 2020-01-29 | 2021-08-05 | 株式会社ナガオシステム | 粉砕方法および混合方法 |
| JP2021115567A (ja) * | 2020-01-29 | 2021-08-10 | 株式会社ナガオシステム | 回転装置、粉砕方法および混合方法 |
| JP7421700B2 (ja) | 2020-01-29 | 2024-01-25 | 株式会社ナガオシステム | 回転装置、粉砕方法および混合方法 |
| JP6777299B1 (ja) * | 2020-01-29 | 2020-10-28 | 株式会社ナガオシステム | 粉砕方法および混合方法 |
| JP2022040084A (ja) * | 2020-08-28 | 2022-03-10 | 国立大学法人大阪大学 | 攪拌方法、攪拌装置、および攪拌容器 |
| JP7783614B2 (ja) | 2020-08-28 | 2025-12-10 | 国立大学法人大阪大学 | 攪拌方法、攪拌装置、および攪拌容器 |
| WO2022075465A1 (ja) * | 2020-10-09 | 2022-04-14 | 三菱マテリアル株式会社 | 容器、回転装置および微粒子作製方法 |
| JP2022063167A (ja) * | 2020-10-09 | 2022-04-21 | 株式会社ナガオシステム | 容器、回転装置および微粒子作製方法 |
| JP7678253B2 (ja) | 2020-10-09 | 2025-05-16 | 三菱マテリアル株式会社 | 容器、回転装置および微粒子作製方法 |
| WO2022075473A1 (ja) * | 2020-10-09 | 2022-04-14 | 三菱マテリアル株式会社 | 回転装置および微粒子作製方法 |
| JP2022083314A (ja) * | 2020-11-24 | 2022-06-03 | 株式会社ナガオシステム | 回転装置および微粒子作製方法 |
| JP7637871B2 (ja) | 2020-11-24 | 2025-03-03 | 株式会社ナガオシステム | 回転装置および微粒子作製方法 |
| KR20220170246A (ko) * | 2021-06-22 | 2022-12-29 | 구본준 | 3d 볼밀의 구동 장치 |
| KR102538841B1 (ko) * | 2021-06-22 | 2023-06-01 | 구본준 | 3d 볼밀의 구동 장치 |
| JP2024086502A (ja) * | 2022-12-17 | 2024-06-27 | 株式会社オートニクス | 血液検体中の凝集物判定装置 |
| JP7603286B2 (ja) | 2022-12-17 | 2024-12-20 | 株式会社オートニクス | 血液検体中の凝集物判定装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017159262A (ja) | エマルションの製造方法および製造装置 | |
| US7396152B2 (en) | Bladeless mixer with planetary motion | |
| JP5687038B2 (ja) | 遠心機 | |
| JP4986929B2 (ja) | 攪拌装置 | |
| CN106345340B (zh) | 一种具有上下搅拌功能的药粉搅拌机 | |
| US8721167B2 (en) | Kneading and granulating machine | |
| JP2020505213A (ja) | 化学液体原料の電子制御撹拌装置 | |
| JP2012011364A (ja) | シェイクミキサー攪拌装置 | |
| KR20230170626A (ko) | 응집현상 방지용 다축 플래니터리 교반기 | |
| JP5506039B2 (ja) | 撹拌脱泡装置に使用する容器、及び、撹拌脱泡装置 | |
| JP4086137B2 (ja) | 二軸撹拌装置 | |
| CN210544557U (zh) | 墨水生产用异向双搅拌桨搅拌器 | |
| JP2009082895A (ja) | 混練脱泡装置及び被混練脱泡材料の混練脱泡方法 | |
| JP2017185463A (ja) | 撹拌容器及びそれを用いた撹拌装置 | |
| JP6069659B2 (ja) | 撹拌装置 | |
| CN206793652U (zh) | 一种高效反应釜 | |
| CN222606001U (zh) | 一种真空制膏机 | |
| CN215139141U (zh) | 一种分散轴及搅拌设备 | |
| CN207786478U (zh) | 一种剪切增稠液制作双重搅拌混合装置 | |
| JP2009011952A (ja) | ミキサ | |
| JP2000140596A (ja) | 混練方法 | |
| CN208049764U (zh) | 一种汽车养护液原料混合设备 | |
| JP6118226B2 (ja) | 攪拌装置 | |
| CN207385323U (zh) | 流体搅拌器 | |
| CN207342607U (zh) | 一种搅拌效率高的搅拌机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170919 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20170928 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20171215 |