JP2017161279A - 自転車検知装置、自転車検知方法、および自転車検知プログラム - Google Patents
自転車検知装置、自転車検知方法、および自転車検知プログラム Download PDFInfo
- Publication number
- JP2017161279A JP2017161279A JP2016044204A JP2016044204A JP2017161279A JP 2017161279 A JP2017161279 A JP 2017161279A JP 2016044204 A JP2016044204 A JP 2016044204A JP 2016044204 A JP2016044204 A JP 2016044204A JP 2017161279 A JP2017161279 A JP 2017161279A
- Authority
- JP
- Japan
- Prior art keywords
- detection area
- bicycle
- detection
- unit
- width direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Traffic Control Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
【課題】検知エリア内に位置する自転車の検知精度を向上させる技術を提供する。【解決手段】計測機能部20は、走査部3が検知エリアを幅方向に走査するレーザ光を照射してから、その反射光を検知するまでの飛行時間を計測する。オブジェクト検知機能部21は、レーザ光を反射した検知エリア内の反射点の位置を取得し、検知エリア内に位置するオブジェクトを検知する。長さ推定機能部22は、検知されたオブジェクトについて、検知エリアの幅方向における長さを推定する。自転車判定機能部25は、推定した検知エリアの幅方向における長さを用いて、検知したオブジェクトが自転車であるかどうかを判定する。また、オブジェクト検知機能部21は、検知エリアの幅方向において第1の距離以内であり、且つ検知エリアの幅方向に直交する方向において第2の距離以内である2つの反射点を、同一のオブジェクトとして検知する。【選択図】図4
Description
この発明は、検知エリア内を走行している自転車を検知する技術に関する。
従来、自転車と歩行者との事故を防止するため、自転車と歩行者とが通行する通行帯を分けることが行われている。具体的には、歩行者が通行する歩行者通行帯と、自転車が通行する自転車通行帯と、を区分けすることが行われている。また、商店街等では、自転車で走行するのを禁止しているところもある(自転車を押して通行するように制限しているところがある。)。また、自転車同士の事故を防止するため、自転車の通行方向を1方向に制限している区間(一方通行の区間)もある。
一方で、自転車事故を防止するには、道路環境(交通環境)の整備だけでなく、交通ルールを自転車の使用者に遵守させること(交通マナーの向上)が重要である。
特許文献1には、自転車で走行するのを禁止している区間(歩行者専用道路等)に対して、走行している自転車の検知を行い、走行している自転車を検知すると、当該自転車の使用者に対して警告を行う装置が記載されている。
しかしながら、特許文献1は、発光素子から照射した赤外光の反射光を、受光素子で受光した時間によって、発光素子から照射した赤外光を反射したオブジェクトが自転車であるかどうかを判定する構成である。このため、走っている人を、自転車として誤検知することがある。また、一般的な自転車は、フレームで構成されているとともに、タイヤを取り付けるホイールのスポークも細いことから、自転車の側面に対して発光素子から照射した赤外光が自転車で反射されずに(自転車のフレーム等に当たらず)、反対側に抜けてしまい(受光素子で反射光を受光できず)、自転車を見逃す(自転車の検知漏れ)こともある。
なお、ここでは、自転車でないオブジェクトを自転車として検知することを誤検知といい、自転車を自転車として検知できないことを検知漏れという。
この発明の目的は、検知エリア内に位置する自転車の検知精度を向上させる技術を提供することにある。
この発明の自転車検知装置は、上記目的を達するために、以下のように構成している。
走査部は、探査波で検知エリアを幅方向に走査し、その反射波を検知する。探査波は、レーザ光であってもよいし、ミリ波であってもよいし、これら以外の電磁波であってもよい。計測部は、走査部が探査波を照射してから、その反射波を検知するまでの飛行時間を計測する。飛行時間を計測することにより、探査波を反射した反射点(オブジェクトの表面)までの距離Lが得られる。
オブジェクト検知部は、走査部による探査波の照射方向と、計測部で計測した飛行時間と、を用いて、探査波を反射した検知エリア内の反射点の位置を取得し、検知エリア内に位置するオブジェクトを検知する。このオブジェクト検知部は、検知エリアの幅方向において第1の距離以内であり、且つ検知エリアの幅方向に直交する方向において第2の距離以内である2つの反射点を、同一のオブジェクトとして検知する。また、長さ推定部は、オブジェクト検知部が検知したオブジェクトについて、検知エリアの幅方向における長さを推定する。
そして、自転車判定部は、オブジェクト検知部が検知したオブジェクトについて、長さ推定部が推定した検知エリアの幅方向における長さを用いて、当該オブジェクトが自転車であるかどうかを判定する。
このように、走査部が探査波で検知エリアを幅方向に走査するので、一部の探査波が自転車で反射されずに(自転車のフレーム等に当たらず)、反対側に抜けてしまっても、ある程度自転車で反射された反射波を検出することができる。したがって、検知エリア内に位置する自転車の検知精度の向上が図れる。
また、オブジェクト検知部が検知したオブジェクトについて、検知エリアの幅方向における移動速度を推定する移動速度推定部を備え、自転車判定部を、オブジェクト検知部が検知したオブジェクトについて、長さ推定部が推定した検知エリアの幅方向における長さ、および移動速度推定部が推定した検知エリアの幅方向における移動速度を用いて、当該オブジェクトが自転車であるかどうかを判定する構成にしてもよい。
このように構成すれば、自転車を押している歩行者、キャリーバックを持った歩行者、ベビーカーを押す歩行者、台車を押す歩行者等を、走行している自転車として誤検知するのを抑えられる。
また、移動速度推定部は、オブジェクト検知部が検知したオブジェクトについて、検知エリアの幅方向における移動速度を、長さ推定部が推定した検知エリアの幅方向における当該オブジェクトの長さを用いて推定する、構成にしてもよい。
自転車を押す人、キャリーバックを持った人、ベビーカーを押す人、台車を押す人等は、人の足の動き等によって推定される検知エリアの幅方向におけるオブジェクトの長さが走行している自転車よりも大きく変化する。したがって、この構成では、検知エリアの幅方向におけるオブジェクトの移動速度の推定精度の向上が図れる。
また、移動速度推定部は、オブジェクト検知部が検知したオブジェクトについて、検知エリアの幅方向における当該オブジェクトの位置の変化から、検知エリアの幅方向におけるオブジェクトの仮移動速度を算出し、当該オブジェクトについて前回推定した検知エリアの幅方向におけるオブジェクトの移動速度と、今回算出した仮移動速度とを用いて、検知エリアの幅方向における移動速度を推定する、構成にしてもよい。
また、走査部による検知エリアの幅方向における探査波での1走査において、オブジェクト検知部が検知したオブジェクトについて、検知エリア内の配列パターンを生成し、この配列パターンを用いて、走査部による検知エリアの幅方向における探査波での走査間で、オブジェクト検知部が検知したオブジェクトを同定する同定部を備え、移動速度推定部は、同定部が同定したオブジェクトについて、検知エリアの幅方向における移動速度を推定する、構成にしてもよい。例えば、同定部は、オブジェクト検知部が検知したオブジェクトについて、検知エリアの幅方向おける並び順、および検知エリアの幅方向に直交する方向における並び順を示す配列パターンを生成する。これにより、走査部による探査波での検知エリアの幅方向の走査間でのオブジェクトの同定が、比較的簡単な処理で行える。したがって、装置本体の処理負荷が抑えられる。
また、自転車判定部が自転車であると判定したオブジェクトについて、走行位置、および移動速度が適正であるかどうかを判定し、適正であると判定しなかったときに警告報知を行う報知部を備えてもよい。
また、走査部は、検知エリアの路面からの高さが250mm〜350mmの範囲で探査波を走査するのが好ましい。一般的な自転車は、ペダル軸の高さが280mm〜300mmであるので、チェーンカバーが路面からの高さが250mm〜350mmの範囲に位置する。したがって、検知エリアに照射した探査波が自転車で反射されずに(自転車のフレーム等に当たらず)、反対側に抜けるのを抑えることができる。
この発明によれば、検知エリア内に位置する自転車の検知精度の向上が図れる。
以下、この発明の実施形態である自転車検知装置について説明する。
図1は、この例にかかる自転車検知装置の主要部の構成を示す図である。自転車検知装置1は、制御部2と、走査部3と、報知部4と、を備えている。この例にかかる自転車検知装置1は、検知エリア内に位置する自転車を検知する。また、自転車検知装置1は、交通ルールを遵守していない自転車の使用者(検知した自転車に乗っている人)に対して警告報知を行う。自転車検知装置1は、歩行者専用の通行帯(歩行者通行帯)を走行している自転車、安全な速度で走行していない自転車、逆走している自転車等を、交通ルールを遵守していない自転車と判定する。
制御部2は、自転車検知装置1本体の動作を制御する。また、詳細については後述するが、制御部2は、この発明で言う、計測部、オブジェクト検知部、長さ推定部、同定部、移動速度推定部、および自転車判定部に相当する構成を有する。また、制御部2が、この発明にかかる自転車検知方法を実行する。さらに、制御部2が、この発明にかかる自転車検知プログラムを実行させるコンピュータである。
走査部3は、レーザダイオード3a(LD3a)と、フォトダイオード3b(PD3b)とを有する。走査部3は、LD3aから照射したレーザ光(この発明で言う探査波に相当する。)で、図2に示す検知エリアを走査する。図2では、歩行者通行帯と自転車通行帯と車道とが区分けされた道路を示している。図2(A)は、歩行者や自転車の通行方向に見た平面図であり、図2(B)は、上方から路面を見た平面図である。また、図2(B)において、ハッチングで示したエリアが、検知エリアである。図2に示す、X軸方向(歩行者や自転車の通行方向)が、この発明で言う、検知エリアの幅方向であり、Y軸方向(歩行者通行帯、自転車通行帯、および車道の並び方向)が、道路の幅方向であり、Z軸方向が路面に対する高さ方向である。X軸、Y軸、およびZ軸は、互いに直交する軸である。
走査部3(LD3a、PD3bを含む)は、ポール10に取り付けている。ポール10は、図2に示すように、歩行者通行帯の路側帯(自転車通行帯と反対側の路側帯)に設置されている。なお、走査部3は、ポール10以外の構造物に取り付けてもよいし、道路上に設置する構成であってもよい。
LD3aは、照射したレーザ光の路面からの高さが250mm〜350mmの範囲になるように取り付けている。一般的な自転車は、ペダル軸の高さが280mm〜300mmであるので、チェーンカバーが路面からの高さが250mm〜350mmの範囲に位置する(図3参照)。すなわち、LD3aは、レーザ光が自転車のチェーンカバーに当たる高さに照射されるようにポール10等に取り付けている。これにより、検知エリアに照射したレーザ光であって、自転車で反射されずに(自転車のフレーム等に当たらず)、反対側に抜けるレーザ光の割合を抑えている。
走査部3は、LD3aから照射されるレーザ光で自転車を検知する検知エリアを走査する。走査部3は、LD3aから照射されるレーザ光をX−Y平面に対して略平行に走査する。走査部3は、Y軸に対するレーザ光の照射角θを、−A°〜+A°の範囲で変化させる。この例では、LD3aから照射されるレーザ光の照射方向が、Y軸に平行であるとき、照射角θ=0°として説明する。走査部3によるレーザ光の走査範囲は、この例では150°(A=75°)である。また、走査部3は、検知エリアの走査時に、レーザ光の照射角θを、Y軸に対して分解角B°間隔で変化させる。分解角B°は、この例では、0.125°である。すなわち、走査部3は、検知エリアの1走査(1サイクルの走査)において、Y軸に対するレーザ光の照射角θが異なる1201本のレーザ光を照射する。また、走査部3が検知エリアの1走査に要する時間(1走査の周期)は、この例では50msecである。走査部3は、周期50msecで、検知エリアを繰り返し走査する。また、走査部3は、LD3aから照射されるレーザ光の照射方向に応じて、PD3bにおける反射光の受光方向を変化させる。
報知部4は、スピーカ4aと、案内表示板4bとを有している。報知部4は、制御部2が自転車の使用者に対して警告を行う必要があると判定した場合、スピーカ4aを利用した音声による警告報知や、案内表示板4bを利用した文字等の表示による警告報知を行う。スピーカ4aや、案内表示板4bは、ポール10に取り付けてもよいし、ポール10以外の道路構造物に取り付けてもよい。
次に、制御部2の機能構成について説明する。図4は、制御部の機能構成を示すブロック図である。制御部2は、計測機能部20と、オブジェクト検知機能部21と、長さ推定機能部22と、同定機能部23と、移動速度推定機能部24と、自転車判定機能部25と、警告報知判定機能部26と、を有している。
計測機能部20は、LD3aがレーザ光を照射してから、PD3bが反射光を受光するまでの時間(飛行時間)を計測する。LD3aから照射したレーザ光を反射した反射点までの距離Lは、
L=c×t/2
により算出できる。但し、cは、光速であり、tは、計測した飛行時間である。
L=c×t/2
により算出できる。但し、cは、光速であり、tは、計測した飛行時間である。
なお、計測機能部20は、LD3aがレーザ光を照射してから、予め定めた計測時間経過しても、PD3bで反射光を受光しなければ、反射点無しと判断する。
オブジェクト検知機能部21は、検知エリアの1走査において、LD3aから照射したレーザ光の照射角θ毎に反射点の位置(X−Y平面上の位置)を取得する。反射点の位置(x,y)は、
x=L×sinθ=(c×t/2)×sinθ
y=L×cosθ=(c×t/2)×cosθ
である。但し、θは、LD3aから照射したレーザ光のY軸に対する照射角である。
x=L×sinθ=(c×t/2)×sinθ
y=L×cosθ=(c×t/2)×cosθ
である。但し、θは、LD3aから照射したレーザ光のY軸に対する照射角である。
また、オブジェクト検知機能部21は、LD3aから照射したレーザ光の反射点をオブジェクト単位でグルーピングすることにより、レーザ光を反射したオブジェクト(検知エリア内に位置するオブジェクト)を検知する。具体的には、オブジェクト検知機能部21は、X軸方向において第1の距離(この例では、100mm)以内であり、且つY軸方向において第2の距離(この例では、400mm)以内である2つの反射点を、同じグループとするグルーピングを行う。オブジェクト検知機能部21は、同じグループにグルーピングされた反射点の塊を1つのオブジェクトとして検知する。
なお、オブジェクト検知機能部21は、反射点aと、反射点bとが、X軸方向において第1の距離以内でない、またはY軸方向において第2の距離以内でない場合であっても、反射点aと、反射点cがX軸方向において第1の距離以内であり、且つY軸方向において第2の距離以内であり、また反射点bと、反射点cがX軸方向において第1の距離以内であり、且つY軸方向において第2の距離以内であれば、反射点a、反射点b、および反射点cを、同じグループとしてグルーピングする。
長さ推定機能部22は、オブジェクト検知機能部21が検知したオブジェクト毎に、そのオブジェクトの長さ(X軸方向の長さ)を推定する。長さ推定機能部22は、X軸方向におけるオブジェクトの両端部の反射点間の距離を、そのオブジェクトの長さとして推定する。
同定機能部23は、長さ推定機能部22において推定された長さが、予め定めた閾値長さ(この例では700mm)を超えるオブジェクトを自転車である可能性がある処理対象オブジェクトに設定する。言い換えれば、同定機能部23は、長さ推定機能部22において推定された長さが閾値長さを超えないオブジェクトを自転車である可能性がないと判断し、処理対象オブジェクトに設定しない。長さ推定機能部22において推定された長さが閾値長さを超えないオブジェクトは、検知エリアを通行している歩行者等である。また、同定機能部23が設定した処理対象オブジェクトには、検知エリア内を走行している自転車だけでなく、自転車を押している歩行者、キャリーバックを持った歩行者、ベビーカーを押す歩行者、台車を押す歩行者等が含まれている。同定機能部23は、長さ推定機能部22において推定された長さによって、処理対象オブジェクトを設定することにより、これ以降の処理にかかる負荷を低減している。
また、同定機能部23は、時間的に連続して行われた走査部3による検知エリアの2回の走査において、一方の走査で検知された処理対象オブジェクトと、他方の走査で検知された処理対象オブジェクトと、を1対1で対応づける(走査間で、検知されたオブジェクトの同定を行う。)。
具体的には、まず、同定機能部23は、処理対象オブジェクトの位置を取得する。処理対象オブジェクトの位置を示すX座標は、X軸方向における処理対象オブジェクトの両端部の反射点間の距離を2等分する位置である。処理対象オブジェクトの示すY座標は、Y軸方向における処理対象オブジェクトの両端部の反射点間の距離を2等分する位置である。
次に、同定機能部23は、一方の走査で検知された処理対象オブジェクトについて、X軸方向の並び順を示すナンバリングjと、Y軸方向の並び順を示すナンバリングkと、を行うとともに、他方の走査で検知された処理対象オブジェクトについても、X軸方向の並び順を示すナンバリングjと、Y軸方向の並び順を示すナンバリングkと、を行う。例えば、同定機能部23は、検知エリアの走査で検知された図5に示す9個のオブジェクト(obj1〜obj9)のうち、4個のオブジェクトobj6〜obj9を処理対象オブジェクトに設定したとする。オブジェクトobj1〜obj5は、長さ推定機能部22において推定された長さが閾値長さを超えないオブジェクトである。
この場合、4個の処理対象オブジェクトobj6〜obj9は、X軸方向(図5における紙面の下から上に向かう方向)に、obj9、obj8、obj7、obj6の順に並んでいる。また、4個の処理対象オブジェクトobj6〜obj9は、Y軸方向(図5における紙面の右から左に向かう方向)に、obj9、obj6、obj8、obj7の順に並んでいる。したがって、4個の処理対象オブジェクトobj6〜obj9に対するナンバリング(j,k)は、obj6が(4,2)、obj7が(3,4)、obj8が(2,3)、obj9が(1,1)になる。同定機能部23は、時間的に連続して行われた2回の走査において、X軸方向、およびY軸方向のナンバリング(j,k)が一致している処理対象オブジェクトを1対1で対応づける(同定する)。
なお、同定機能部23は、対応づけることができない処理対象オブジェクトがあれば、同定失敗と判断する(この2回の走査で検知された処理対象オブジェクトの対応づけを行わない。)。また、同定機能部23は、時間的に連続する2回の走査で検知された処理対象オブジェクトの個数が異なる場合も、同定失敗と判断する。
このように、同定機能部23は、時間的に連続する2回の走査で検知された処理対象オブジェクトの同定を、検知エリア内における処理対象オブジェクトの配列パターン(X軸方向、およびY軸方向のナンバリング(j,k))を用いて行う。したがって、同定機能部23は、時間的に連続する2回の走査で検知された処理対象オブジェクトを比較的簡単な処理で同定できる。
移動速度推定機能部24は、同定機能部23が設定した処理対象オブジェクトの移動速度(移動速度)を推定する。移動速度推定機能部24は、X軸方向の移動速度を推定する。移動速度推定機能部24は、時間的に連続して行われた走査部3による検知エリアのn回(nは2以上の整数)の走査における検知結果Sを用いて、処理対象オブジェクトの移動速度を推定する。検知結果Sは、処理対象オブジェクトのX軸方向の座標(x)と、X軸方向の長さ(l)である。この例では、n=4である。ここでは、今回の走査における処理対象オブジェクトの検知結果S(t)、1回前の走査における自転車の検知結果S(t−1)、2回前の走査における自転車の検知結果S(t−2)、3回前の走査における自転車の検知結果S(t−3)として説明する。
移動速度推定機能部24は、検知結果S(t−3)と検知結果S(t−2)との間、検知結果S(t−2)と検知結果S(t−1)との間、および検知結果S(t−1)と検知結果S(t)との間、の全てにおいて、同定機能部23が処理対象オブジェクトの同定に失敗していない場合、処理対象オブジェクトのX軸方向の移動速度を推定する。言い換えれば、移動速度推定機能部24は、検知結果S(t−3)と検知結果S(t−2)との間、検知結果S(t−2)と検知結果S(t−1)との間、および検知結果S(t−1)と検知結果S(t)との間、の少なくともいずれか1つにおいて、同定機能部23が処理対象オブジェクトの同定に失敗している場合、処理対象オブジェクトのX軸方向の移動速度を推定しない。
移動速度推定機能部24は、同定機能部23が直前の3回において、処理対象オブジェクトの同定に失敗していない場合、時間的に連続する検知エリアの2回の走査毎に、処理対象オブジェクトについて、走査間移動速度を算出する。すなわち、移動速度推定機能部24は、今回の走査における自転車の検知結果S(t)と、1回前の走査における自転車の検知結果S(t−1)とを用いて第1の走査間移動速度、1回前の走査における自転車の検知結果S(t−1)と、2回前の走査における自転車の検知結果S(t−2)とを用いた第2の走査間移動速度、および2回前の走査における自転車の検知結果S(t−2)と、3回前の走査における自転車の検知結果S(t−3)とを用いた第3の走査間移動速度の3つを算出する。走査間移動速度は、以下の式により算出する。
x>x’の場合
走査間移動速度=((x−x’)−(|l−l’|/2))/(1走査の周期)
x≦x’の場合
走査間移動速度=((x’−x)−(|l−l’|/2))/(1走査の周期)
但しx、x’は、それぞれの走査で検知された処理対象オブジェクトのX軸の座標であり、l、l’は、それぞれの走査で推定された処理対象オブジェクトのX軸方向の長さである。x’、l’は、検知結果がx、lであった走査の前回の検知結果である。なお、移動方向は、x、x’の大小関係から判断できる。
走査間移動速度=((x−x’)−(|l−l’|/2))/(1走査の周期)
x≦x’の場合
走査間移動速度=((x’−x)−(|l−l’|/2))/(1走査の周期)
但しx、x’は、それぞれの走査で検知された処理対象オブジェクトのX軸の座標であり、l、l’は、それぞれの走査で推定された処理対象オブジェクトのX軸方向の長さである。x’、l’は、検知結果がx、lであった走査の前回の検知結果である。なお、移動方向は、x、x’の大小関係から判断できる。
移動速度推定機能部24は、算出した3つの走査間移動速度(第1の走査間移動速度、第2の走査間移動速度、第3の走査間移動速度)の中間値を、今回の走査における処理対象オブジェクトの仮の移動速度vとする。
なお、移動速度推定機能部24は、第1の走査間移動速度、第2の走査間移動速度、および第3の走査間移動速度の平均値を今回の走査における処理対象オブジェクトの仮の移動速度vとする構成であってもよい。
次に、移動速度推定機能部24は、今回算出した処理対象オブジェクトの仮の移動速度vと、前回算出した処理対象オブジェクトの移動速度V’との差(v−V’)の2分の1を、速度変化量α(α=(v−V’)/2)として算出する。そして、移動速度推定機能部24は、今回の走査における処理対象オブジェクトの移動速度Vを、前回算出した処理対象オブジェクトの移動速度V’に、速度変化量αを加算した速度であると推定する。
すなわち、移動速度推定機能部24は、処理対象オブジェクトの移動速度Vを、
V=V’+α=(v+V’)/2
であると推定する。
V=V’+α=(v+V’)/2
であると推定する。
但し、速度変化量αは、上限値を設定し、速度変化量αが上限値を超えたときは、速度変化量α=上限値にする。速度変化量αの上限値は、例えば2km/hである。また、移動速度推定機能部24は、処理対象オブジェクトの移動速度Vが前回推定されていない場合、V’=0として、今回の処理対象オブジェクトの移動速度Vを推定する。
一般的な自転車は、フレームで構成されているとともに、タイヤを取り付けるホイールのスポークも細いことから、自転車の側面に対して照射した探査波が自転車で反射されずに(自転車のフレーム等に当たらず)、反対側に抜けてしまうことがあるので、走査部3による検知エリアの走査毎に、長さ推定機能部22で推定される検知エリアの幅方向におけるオブジェクトの長さがある程度の範囲で変化することがある。一方、自転車を押す人、キャリーバックを持った人、ベビーカーを押す人、台車を押す人等は、人の足の動き等によって推定される検知エリアの幅方向におけるオブジェクトの長さが走行している自転車よりも大きく変化する。
上述したように、移動速度推定機能部24は、処理対象オブジェクトのX軸方向における長さの変化量を用いて、当該処理対象オブジェクトの移動速度Vを推定する。したがって、移動速度推定機能部24は、処理対象オブジェクトのX軸方向における移動速度Vを精度よく推定することができる。
自転車判定機能部25は、処理対象オブジェクトについて移動速度推定機能部24が推定した移動速度Vが、自転車閾値速度(例えば、7km/h)を超えていれば、当該処理対象オブジェクトを自転車であると判定する。
また、警告報知判定機能部26は、自転車判定機能部25によって自転車であると判定された処理対象オブジェクトのX−Y平面上の位置、移動速度、走行方向等が適正であるかどうかによって、警告の要否を判定する。処理対象オブジェクトのX−Y平面上の位置は、同定機能部23により検知されている。また、処理対象オブジェクトの移動速度、および走行方向は、移動速度推定機能部24によって推定されている。
以下、この例にかかる自転車検知装置1の動作について説明する。自転車検知装置1は、以下に示す、計測処理と、自転車検知処理と、警告報知処理と、を行う。
図6は、計測処理を示すフローチャートである。この計測処理は、走査部3がLD3aから照射したレーザ光で検知エリアを走査し、計測機能部20がレーザ光の照射角θ毎に、PD3bで反射光を受光するまでの飛行時間を計測する処理である。
走査部3は、LD3aから照射するレーザ光の照射角θを初期角(この例では、−A°)に設定する(s1)。走査部3は、LD3aからレーザ光を照射し(s2)、PD3bで反射光を受光するか、予め定めた設定時間経過するのを待つ(s3、s4)。計測機能部20は、PD3bで反射光を受光すると、s2でレーザ光を照射してから、PD3bで反射光を受光するまでの経過時間を、飛行時間として記憶する(s5)。s5では、そのときのレーザ光の照射角θと、飛行時間とを対応付けて記憶する。また、計測機能部20は、PD3bで反射光を受光することなく、設定時間経過すると、そのときのレーザ光の照射角θに対応付ける飛行時間を∞にする。
走査部3は、今回のレーザ光のY軸に対する照射角θがA°であるかどうかを判定し(s6)、Y軸に対する照射角θがA°で無ければ、レーザ光のY軸に対する照射角θを分解角B°(この例では、0.125°)だけ変化させ(s7)、s2に戻る。
また、走査部3は、s6で今回のレーザ光のY軸に対する照射角θがA°であると判定すると、s1に戻る。
自転車検知装置1は、この計測処理を実行することで、計測機能部20がレーザ光のY軸に対する照射角θ毎に、飛行時間tを対応付けた計測データを生成する。自転車検知装置1は、s1〜s7の処理を実行することで、LD3aから照射したレーザ光による検知エリアの1走査を行う。また、自転車検知装置1は、図6に示す計測処理を繰り返し行うことによって、レーザ光による検知エリアの走査を繰り返す。
図7は、自転車検知処理を示すフローチャートである。自転車検知装置1は、図6に示した計測処理でLD3aから照射したレーザ光による検知エリアの1走査が完了すると、この自転車検知処理を開始する。
オブジェクト検知機能部21は、図6に示した計測処理で生成された計測データ(LD3aから照射したレーザ光による検知エリアの今回の走査により生成した計測データ)を用いて、X−Y平面上におけるレーザ光の反射点の位置(x,y)を算出する(s11)。反射点の位置(x,y)は、上述したように、
x=L×sinθ=(c×t/2)×sinθ
y=L×cosθ=(c×t/2)×cosθ
により算出できる。但し、θは、LD3aから照射したレーザ光のY軸に対する照射角であり、tは計測した飛行時間である。なお、計測した飛行時間が∞である照射角θについては、反射点なしとする。
x=L×sinθ=(c×t/2)×sinθ
y=L×cosθ=(c×t/2)×cosθ
により算出できる。但し、θは、LD3aから照射したレーザ光のY軸に対する照射角であり、tは計測した飛行時間である。なお、計測した飛行時間が∞である照射角θについては、反射点なしとする。
オブジェクト検知機能部21は、X−Y平面上におけるレーザ光の反射点を、オブジェクト単位でグルーピングすることにより、レーザ光を反射したオブジェクトを検知する(s12)。
長さ推定機能部22は、s12で検知したオブジェクト毎に、X軸方向の長さを推定する(s13)。
同定機能部23は、s13で推定されたX軸方向の長さが、予め定めた閾値長さ(この例では700mm)を超えるオブジェクトを処理対象オブジェクトに設定する(s14)。また、同定機能部23は、検知エリアに対する今回の走査で設定した処理対象オブジェクトと、検知エリアに対する前回の走査で設定した処理対象オブジェクトと、を1対1で対応付ける同定処理を行う(s15)。
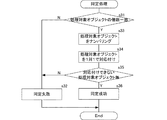
図8は、s15にかかる同定処理を示すフローチャートである。同定機能部23は、検知エリアに対する今回の走査で設定した処理対象オブジェクトの個数と、検知エリアに対する前回の走査で設定した処理対象オブジェクトの個数と、が一致しているかどうかを判定する(s31)。同定機能部23は、s31で処理対象オブジェクトの個数が一致していないと判定すると、同定失敗と判断し(s32)、本処理を終了する。
同定機能部23は、s31で処理対象オブジェクトの個数が一致していると判定すると、今回の走査で検知された処理対象オブジェクトについて、X軸方向の並び順を示すナンバリングjと、Y軸方向の並び順を示すナンバリングkと、を行うとともに、前回の走査で検知された処理対象オブジェクトについても、X軸方向の並び順を示すナンバリングjと、Y軸方向の並び順を示すナンバリングkと、を行う(s33)。s33では、図5を参照して説明した、ナンバリングを行う。
同定機能部23は、s33で行ったX軸方向、およびY軸方向のナンバリング(j,k)が一致している処理対象オブジェクトを1対1で対応づける(s34)。同定機能部23は、対応づけることができない処理対象オブジェクトがあれば(s35)、s32で同定失敗と判断し、本処理を終了する。一方、同定機能部23は、対応づけることができない処理対象オブジェクトがなければ(s35)、同定成功と判断し(s36)、本処理を終了する。
図7に戻って、s15にかかる同定処理が完了すると、今回設定した処理対象オブジェクトの移動速度を推定する移動速度推定処理を行う(s16)。図9は、s16にかかる移動速度推定処理を示すフローチャートである。移動速度推定機能部24は、最近n回(この例では4回)にわたって、s15にかかる同定処理で処理対象オブジェクトの同定に失敗していないかどうかを判定する(s41)。移動速度推定機能部24は、最近n回の同定処理で処理対象オブジェクトの同定に少なくとも1度失敗していると、移動速度推定不可と判断し(s42)、本処理を終了する。
移動速度推定機能部24は、最近n回の同定処理で処理対象オブジェクトの同定に1度も失敗していないと、最近n回の走査における検知結果Sを用いて、処理対象オブジェクトのX軸方向の速度を推定する。まず、移動速度推定機能部24は、時間的に連続する走査の検知結果Sを用いて、(n−1)個(この例では3個)の走査間移動速度を算出する(s43)。検知結果S=(x,l)は、処理対象オブジェクトのX軸方向の位置(x)と、X軸方向の長さ(l)である。走査間移動速度は、上述したように、
x>x’の場合
走査間移動速度=((x−x’)−(|l−l’|/2))/(1走査の周期)
x≦x’の場合
走査間移動速度=((x’−x)−(|l−l’|/2))/(1走査の周期)
により算出する。但しx、x’は、それぞれの走査で検知された処理対象オブジェクトのX軸の座標であり、l、l’は、それぞれの走査で推定された処理対象オブジェクトのX軸方向の長さである。x’、l’は、検知結果がx、lであった走査の前回の検知結果である。なお、移動方向は、x、x’の大小関係から判断できる。
x>x’の場合
走査間移動速度=((x−x’)−(|l−l’|/2))/(1走査の周期)
x≦x’の場合
走査間移動速度=((x’−x)−(|l−l’|/2))/(1走査の周期)
により算出する。但しx、x’は、それぞれの走査で検知された処理対象オブジェクトのX軸の座標であり、l、l’は、それぞれの走査で推定された処理対象オブジェクトのX軸方向の長さである。x’、l’は、検知結果がx、lであった走査の前回の検知結果である。なお、移動方向は、x、x’の大小関係から判断できる。
次に、移動速度推定機能部24は、算出した(n−1)個の走査間移動速度(この例では、第1の走査間移動速度、第2の走査間移動速度、および第3の走査間移動速度の3個)の中間値を、今回の走査における処理対象オブジェクトの仮の移動速度vとする(s44)。
移動速度推定機能部24は、今回算出した処理対象オブジェクトの仮の移動速度vと、前回算出した処理対象オブジェクトの移動速度V’との差(v−V’)の2分の1を、速度変化量α(α=(v−V’)/2)として算出する(s45)。そして、移動速度推定機能部24は、今回の走査における処理対象オブジェクトの移動速度Vを、前回算出した処理対象オブジェクトの移動速度V’に、速度変化量αを加算した速度であると推定する(s46)。
すなわち、移動速度推定機能部24は、処理対象オブジェクトの移動速度Vを、
V=V’+α=(v+V’)/2
であると推定する。
V=V’+α=(v+V’)/2
であると推定する。
但し、速度変化量αは、上限値を設定し、速度変化量αが上限値を超えたときは、速度変化量α=上限値にする。速度変化量αの上限値は、例えば2km/hである。また、移動速度推定機能部24は、処理対象オブジェクトの移動速度Vが前回推定されていない場合、V’=0として、今回の処理対象オブジェクトの移動速度Vを推定する。
図9に示す移動速度推定処理では、今回設定した処理対象オブジェクト毎に、その処理対象オブジェクトの移動速度Vを推定する。
図7に戻って、s16にかかる移動速度推定処理が完了すると、自転車判定機能部25において、今回設定した処理対象オブジェクト毎に、自転車であるかどうかを判定する自転車判定処理を行い(s17)、s11に戻る。s17では、処理対象オブジェクト毎に、今回s16で推定した移動速度Vが予め定めた速度(例えば、7km/h)以上であれば、自転車と判定し、それ以外であれば(今回s16で移動速度Vが推定されていない場合を含む)、自転車であると判定しない。
次に、警告報知処理について説明する。図10は、警告報知処理を示すフローチャートである。自転車検知装置1は、図7に示した自転車検知処理が完了すると、この警告報知処理を開始する。
警告報知判定機能部26は、検知エリア内の歩行者通行帯を走行している自転車の有無(s51)、検知エリア内の自転車通行帯を予め定めた警告速度(例えば、30km/h)を超えて走行している自転車の有無(s52)、および検知エリア内の自転車通行帯を逆走している自転車の有無(s53)を判定する。
なお、s53にかかる判定は、検知エリア内の自転車通行帯に対して、自転車の走行方向が一方の方向に制限されている場合に行う。
警告報知判定機能部26は、検知エリア内の歩行者通行帯を走行している自転車が無く、検知エリア内の自転車通行帯を予め定めた警告速度を超えて走行している自転車も無く、さらに、検知エリア内の自転車通行帯を逆走している自転車も無ければ、警告報知不要と判定し(s54)、s51に戻る。
一方、警告報知判定機能部26は、検知エリア内の歩行者通行帯を走行している自転車、検知エリア内の自転車通行帯を予め定めた警告速度を超えて走行している自転車、および検知エリア内の自転車通行帯を逆走している自転車が少なくとも1台あると、警告報知要と判定し(s55)、s51に戻る。
自転車検知装置1は、s55で警告報知要と判定すると、報知部4において、警告報知を行う。これにより、自転車の使用者に対して、交通ルールを遵守させることができる。
上記の例では、LD3aから照射されるレーザ光で検知エリアを走査するとしたが、ミリ波等の他の電磁波で検知エリアを走査してもよい。
1…自転車検知装置
2…制御部
3…走査部
3a…レーザダイオード(LD)
3b…フォトダイオード(PD)
4…報知部
4a…スピーカ
4b…案内表示板
20…計測機能部
21…オブジェクト検知機能部
22…推定機能部
23…同定機能部
24…移動速度推定機能部
25…自転車判定機能部
26…警告報知判定機能部
2…制御部
3…走査部
3a…レーザダイオード(LD)
3b…フォトダイオード(PD)
4…報知部
4a…スピーカ
4b…案内表示板
20…計測機能部
21…オブジェクト検知機能部
22…推定機能部
23…同定機能部
24…移動速度推定機能部
25…自転車判定機能部
26…警告報知判定機能部
Claims (10)
- 探査波で検知エリアを幅方向に走査し、その反射波を検知する走査部と、
前記走査部が探査波を照射してから、その反射波を検知するまでの飛行時間を計測する計測部と、
前記走査部による探査波の照射方向と、前記計測部で計測した飛行時間と、を用いて、前記探査波を反射した前記検知エリア内の反射点の位置を取得し、前記検知エリア内に位置するオブジェクトを検知するオブジェクト検知部と、
前記オブジェクト検知部が検知したオブジェクトについて、前記検知エリアの幅方向における長さを推定する長さ推定部と、
前記オブジェクト検知部が検知したオブジェクトについて、前記長さ推定部が推定した前記検知エリアの幅方向における長さを用いて、当該オブジェクトが自転車であるかどうかを判定する自転車判定部と、を備え、
前記オブジェクト検知部は、前記検知エリアの幅方向において第1の距離以内であり、且つ前記検知エリアの幅方向に直交する方向において第2の距離以内である2つの反射点を、同一のオブジェクトとして検知する、自転車検知装置。 - 前記オブジェクト検知部が検知したオブジェクトについて、前記検知エリアの幅方向における移動速度を推定する移動速度推定部を備え、
前記自転車判定部は、前記オブジェクト検知部が検知したオブジェクトについて、前記長さ推定部が推定した前記検知エリアの幅方向における長さ、および前記移動速度推定部が推定した前記検知エリアの幅方向における移動速度を用いて、当該オブジェクトが自転車であるかどうかを判定する、請求項1に記載の自転車検知装置。 - 前記移動速度推定部は、前記オブジェクト検知部が検知したオブジェクトについて、前記検知エリアの幅方向における移動速度を、前記長さ推定部が推定した前記検知エリアの幅方向における当該オブジェクトの長さを用いて推定する、請求項2に記載の自転車検知装置。
- 前記移動速度推定部は、前記オブジェクト検知部が検知したオブジェクトについて、前記検知エリアの幅方向における当該オブジェクトの位置の変化から、前記検知エリアの幅方向におけるオブジェクトの仮移動速度を算出し、当該オブジェクトについて前回推定した前記検知エリアの幅方向におけるオブジェクトの移動速度と、今回算出した前記仮移動速度とを用いて、前記検知エリアの幅方向における移動速度を推定する、請求項2、または3に記載の自転車検知装置。
- 前記走査部による探査波での前記検知エリアの幅方向の1走査において、前記オブジェクト検知部が検知したオブジェクトの配列を示す配列パターンを生成し、前記走査部による探査波での前記検知エリアの幅方向の走査間で、前記オブジェクト検知部が検知したオブジェクトの同定を、前記配列パターンを用いて行う同定部を備え、
前記移動速度推定部は、前記同定部が同定したオブジェクトについて、前記検知エリアの幅方向における移動速度を推定する、請求項2〜4のいずれかに記載の自転車検知装置。 - 前記同定部は、前記オブジェクト検知部が検知したオブジェクトについて、前記検知エリアの幅方向おけるオブジェクトの並び順、および前記検知エリアの幅方向に直交する方向におけるオブジェクトの並び順を示す配列パターンを生成する、請求項5に記載の自転車検知装置。
- 前記自転車判定部が自転車であると判定したオブジェクトについて、走行位置、および移動速度が適正であるかどうかを判定し、適正であると判定しなかったときに警告報知を行う報知部を備えた請求項2〜6のいずれかに記載の自転車検知装置。
- 前記走査部は、前記検知エリアの路面からの高さが250mm〜350mmの範囲で探査波を走査する、請求項1〜7のいずれかに記載の自転車検知装置。
- 探査波で検知エリアを幅方向に走査して反射波を検知する走査部が探査波を照射してから、その反射波を検知するまでの飛行時間を計測する計測ステップと、
前記走査部による探査波の照射方向と、前記計測ステップで計測した飛行時間と、を用いて、前記探査波を反射した前記検知エリア内の反射点の位置を取得し、前記検知エリア内に位置するオブジェクトを検知するオブジェクト検知ステップと、
前記オブジェクト検知ステップで検知したオブジェクトについて、前記検知エリアの幅方向における長さを推定する長さ推定ステップと、
前記オブジェクト検知ステップで検知したオブジェクトについて、前記長さ推定ステップで推定した前記検知エリアの幅方向における長さを用いて、当該オブジェクトが自転車であるかどうかを判定する判定ステップと、を備え、
前記オブジェクト検知ステップは、前記検知エリアの幅方向において第1の距離以内であり、且つ前記検知エリアの幅方向に直交する方向において第2の距離以内である2つの反射点を、同一のオブジェクトとして検知する、自転車検知方法。 - 探査波で検知エリアを幅方向に走査して反射波を検知する走査部が探査波を照射してから、その反射波を検知するまでの飛行時間を計測する計測ステップと、
前記走査部による探査波の照射方向と、前記計測ステップで計測した飛行時間と、を用いて、前記探査波を反射した前記検知エリア内の反射点の位置を取得し、前記検知エリア内に位置するオブジェクトを検知するオブジェクト検知ステップと、
前記オブジェクト検知ステップで検知したオブジェクトについて、前記検知エリアの幅方向における長さを推定する長さ推定ステップと、
前記オブジェクト検知ステップで検知したオブジェクトについて、前記長さ推定ステップで推定した前記検知エリアの幅方向における長さを用いて、当該オブジェクトが自転車であるかどうかを判定する判定ステップと、をコンピュータに実行させ、
前記オブジェクト検知ステップは、前記検知エリアの幅方向において第1の距離以内であり、且つ前記検知エリアの幅方向に直交する方向において第2の距離以内である2つの反射点を、同一のオブジェクトとして検知するステップである、自転車検知プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016044204A JP2017161279A (ja) | 2016-03-08 | 2016-03-08 | 自転車検知装置、自転車検知方法、および自転車検知プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016044204A JP2017161279A (ja) | 2016-03-08 | 2016-03-08 | 自転車検知装置、自転車検知方法、および自転車検知プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017161279A true JP2017161279A (ja) | 2017-09-14 |
Family
ID=59857939
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016044204A Pending JP2017161279A (ja) | 2016-03-08 | 2016-03-08 | 自転車検知装置、自転車検知方法、および自転車検知プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017161279A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021518556A (ja) * | 2018-03-20 | 2021-08-02 | パノセンス インコーポレイテッド | ノイズフロアの適応識別を使用したアクティブ信号検出 |
| US11681029B2 (en) | 2018-03-20 | 2023-06-20 | Zoox, Inc. | Detecting a laser pulse edge for real time detection |
-
2016
- 2016-03-08 JP JP2016044204A patent/JP2017161279A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021518556A (ja) * | 2018-03-20 | 2021-08-02 | パノセンス インコーポレイテッド | ノイズフロアの適応識別を使用したアクティブ信号検出 |
| US11681029B2 (en) | 2018-03-20 | 2023-06-20 | Zoox, Inc. | Detecting a laser pulse edge for real time detection |
| JP7308856B2 (ja) | 2018-03-20 | 2023-07-14 | ズークス インコーポレイテッド | ノイズフロアの適応識別を使用したアクティブ信号検出 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104793202B (zh) | 多雷达成像传感器的对象融合系统 | |
| JP5664252B2 (ja) | 歩行者検出装置 | |
| US20180059219A1 (en) | Multi-beam position sensing devices | |
| JP5712900B2 (ja) | 周辺物体検出装置 | |
| JP2008026997A (ja) | 歩行者認識装置及び歩行者認識方法 | |
| CN103443838B (zh) | 物体识别装置 | |
| TWI595457B (zh) | Anti-collision three-dimensional depth sensing system and its operation method | |
| JP4165524B2 (ja) | 通過人数検出装置及び方法 | |
| KR20140073643A (ko) | 노면 표식 인식 장치 및 그 인식 방법 | |
| JP5570708B2 (ja) | 対象物検出装置 | |
| JP2011232230A (ja) | 上方障害物検知装置、衝突防止装置および上方障害物検知方法 | |
| US11960678B2 (en) | Proximity detection device to detect a user's approach to a display surface comprising a sensitivity setting unit | |
| JP2014092434A (ja) | 物標検出装置、及び、当該装置を用いた接触回避システム | |
| US10408610B1 (en) | Method and system for displacement measurement of surfaces on a moving vehicle | |
| JP2017161279A (ja) | 自転車検知装置、自転車検知方法、および自転車検知プログラム | |
| JP2004527852A (ja) | オプトエレクトロニクス装置の校正方法 | |
| JP2010205042A (ja) | 歩行者検出装置 | |
| JP6728790B2 (ja) | 自転車検知装置、自転車検知方法、および自転車検知プログラム | |
| JP2017161280A (ja) | 自転車検知装置、自転車検知方法、および自転車検知プログラム | |
| JP7073949B2 (ja) | 避難誘導装置、避難誘導システム、および制御プログラム | |
| JP4247720B2 (ja) | 通過人数検出装置及び方法 | |
| JP4664141B2 (ja) | 周辺他車通知装置 | |
| JP2006208076A (ja) | 人数検出装置及び方法 | |
| KR20190001860A (ko) | 대상체 표면 감지장치 | |
| US9766753B2 (en) | Optical touch system and method having image sensors to detect objects over a touch surface |