JP2017162075A - 車両周辺監視装置、車両周辺監視方法、及び車両周辺監視プログラムとその記録媒体 - Google Patents
車両周辺監視装置、車両周辺監視方法、及び車両周辺監視プログラムとその記録媒体 Download PDFInfo
- Publication number
- JP2017162075A JP2017162075A JP2016044326A JP2016044326A JP2017162075A JP 2017162075 A JP2017162075 A JP 2017162075A JP 2016044326 A JP2016044326 A JP 2016044326A JP 2016044326 A JP2016044326 A JP 2016044326A JP 2017162075 A JP2017162075 A JP 2017162075A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- periphery monitoring
- monitoring device
- target vehicle
- movement estimation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
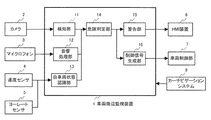
図1に示す本発明の車両周辺監視装置1には、カメラ2と、マイクロフォン3と、速度センサ4と、ヨーレートセンサ5と、HMI(Human Machine Interface:ヒューマン・マシーン・インタフェース)装置6と、車両制御部7と、カーナビゲーションシステム8とが接続されている。なお、これらの構成要素は、後述するように、全ての実施の形態に必須のものではなく、各実施の形態に応じて使用されるものである。
例えば、自車両20と対象車両30の距離をx、自車両の車速をvとすると、対象車両30に到達するまでの時間tは、t=x/vとなる。
また、対象車両30のハンドル舵角を一定の範囲で規定すると。上記dを半径とした扇形が対象物の危険エリアとなる。
例えば、自車速とヨーレートから一定時間後に進む移動距離x(t)、y(t)は以下の式で推定できる。

ここで、運転者への警告だけではなく、制御信号生成部16を通じて、車両制御部7により車両20を減速させたり、ステアリング操作を命令することで自車両の制御を行ってもよい。
また、自車両が駐車中の場合は、対象車両が前方に動く可能性だけではなく、ドアを開けることによって横に広がる可能性も考慮して危険エリアを算出してもよい。
図4のフローチャートは、本実施の形態2における車両周辺監視装置1の動作例を示しており、本実施の形態では、カメラ2による検知に加えて、マイクロフォン3によって周辺の音を集める(ステップS11)。そして、ステップS2で検出した対象車両の方向にエンジン音が有るか否かを判定する(ステップS12)。これによって、対象車両の存在を検知し、信頼性を向上させた構成となっている。
図5は、本発明による車両周辺監視装置の実施の形態3として、起動条件をフローチャートで示したものであり、カーナビゲーションシステム8が持っているGPS情報とマップ情報、すなわち自車両の現在地点情報を取得し(ステップS21)、この現在地点情報から自車両が駐車場に存在する場合(ステップS22のYes)のみ、図2及び図4に示す上記実施の形態1及び2による車両周辺監視装置を起動する(ステップS23)ものである。
また、危険判定部は、自動運転走行時にのみ起動されるように設定してもよい。
また、上記の目的を達成するための本発明に係る車両周辺監視装置は、カメラ映像信号から、対象車両の移動推定エリアを算出する検知部と、センサ信号から、自車両の運転状態を取得する自車両状態認識部と、前記自車両の運転状態から前記自車両の移動推定経路を算出するとともに前記対象車両の移動推定エリアに前記自車両の移動推定経路が一定時間後に進入するか否かを判定する危険判定部と、前記危険判定部において、進入すると判定されたとき、警告信号を出力する警告部とを備え、前記危険判定部は、前記検知部が、前記対象車両のワイパー動作が有ったことを検知したときに、前記自車両の移動推定経路を算出する。
さらに、上記の目的を達成するための本発明に係る車両周辺監視装置は、カメラ映像信号から、対象車両の移動推定エリアを算出する検知部と、センサ信号から、自車両の運転状態を取得する自車両状態認識部と、前記自車両の運転状態から前記自車両の移動推定経路を算出するとともに前記対象車両の移動推定エリアに前記自車両の移動推定経路が一定時間後に進入するか否かを判定する危険判定部と、前記危険判定部において、進入すると判定されたとき、警告信号を出力する警告部とを備え、前記危険判定部は、前記検知部が、前記対象車両内の温度を検知したときに、前記自車両の移動推定経路を算出する。
また本発明では、カメラ映像信号から、対象車両の移動推定エリアを算出し、センサ信号から、自車両の運転状態を取得し、前記自車両の運転状態から前記自車両の移動推定経路を算出するとともに前記対象車両の移動推定エリアに前記自車両の移動推定経路が一定時間後に進入するか否かを判定し、進入すると判定されたとき、警告信号を出力し、前記対象車両のワイパー動作が有ったことを検知したときに、前記自車両の移動推定経路を算出する車両周辺監視方法が提供される。
さらに本発明では、カメラ映像信号から、対象車両の移動推定エリアを算出し、センサ信号から、自車両の運転状態を取得し、前記自車両の運転状態から前記自車両の移動推定経路を算出するとともに前記対象車両の移動推定エリアに前記自車両の移動推定経路が一定時間後に進入するか否かを判定し、進入すると判定されたとき、警告信号を出力し、前記対象車両内の温度を検知したときに、前記自車両の移動推定経路を算出する車両周辺監視方法が提供される。
例えば、自車速とヨーレートから一定時間後に進む移動距離x(t)、y(t)は以下の式で推定できる。
また、上記の目的を達成するための本発明に係る車両周辺監視装置は、カメラ映像信号から、対象車両の移動推定エリアを算出する検知部と、センサ信号から、自車両の運転状態を取得する自車両状態認識部と、前記自車両の運転状態から前記自車両の移動推定経路を算出するとともに前記対象車両の移動推定エリアに前記自車両の移動推定経路が一定時間後に進入するか否かを判定する危険判定部と、前記危険判定部において、進入すると判定されたとき、警告信号を出力する警告部とを備え、前記危険判定部は、前記検知部が、前記対象車両のワイパー動作が有ったことを検知したときに、前記自車両の移動推定経路を算出する。
また本発明では、カメラ映像信号から、対象車両の移動推定エリアを算出し、センサ信号から、自車両の運転状態を取得し、前記自車両の運転状態から前記自車両の移動推定経路を算出するとともに前記対象車両の移動推定エリアに前記自車両の移動推定経路が一定時間後に進入するか否かを判定し、進入すると判定されたとき、警告信号を出力し、前記対象車両のワイパー動作が有ったことを検知したときに、前記自車両の移動推定経路を算出する車両周辺監視方法が提供される。
Claims (18)
- カメラ映像信号から、対象車両の移動推定エリアを算出する検知部と、
センサ信号から、自車両の移動推定経路を算出する自車両状態認識部と、
前記対象車両の移動推定エリアに前記自車両の移動推定経路が一定時間後に進入するか否か判定する危険判定部と、
前記危険判定部において、進入すると判定されたとき、警告信号を出力する警告部とを備えた
車両周辺監視装置。 - 前記検知部は、前記対象車両内の人物を特定したときに前記自車両の移動エリアを算出する
請求項1に記載の車両周辺監視装置。 - 前記検知部は、前記対象車両内の人物の顔向きを特定したときに前記自車両の移動エリアを算出する
請求項1に記載の車両周辺監視装置。 - 前記検知部は、前記対象車両の振動が有ったことを検知したときに前記自車両の移動エリアを算出する
請求項1に記載の車両周辺監視装置。 - 前記検知部は、前記対象車両のワイパー動作が有ったことを検知したときに前記自車両の移動エリアを算出する
請求項1に記載の車両周辺監視装置。 - 前記検知部は、前記対象車両のライトが点灯されていることを検知したときに前記自車両の移動エリアを算出する
請求項1に記載の車両周辺監視装置。 - 前記検知部は、前記対象車両内の温度を検知したときに前記自車両の移動エリアを算出する
請求項1に記載の車両周辺監視装置。 - 前記警告部は、運転者に対して警告音又は警告映像により警告する
請求項1に記載の車両周辺監視装置。 - 前記危険判定部は、前記一定時間を数値化して設定された危険度に基づいて判定を行う
請求項1に記載の車両周辺監視装置。 - 前記危険判定部は、自動運転走行時にのみ起動される
請求項1に記載の車両周辺監視装置。 - 前記警告信号を出力するときに前記自車両の速度を低減させる車両制御部に自動ブレーキ信号を出力する制御信号生成部をさらに備えた
請求項1に記載の車両周辺監視装置。 - 前記自車両の運転手が、前記対象車両に対して注意を払っているか否かを判別する運転手監視装置をさらに備えた
請求項1に記載の車両周辺監視装置。 - 前記センサ信号は、速度センサ及びヨーレートセンサからの出力信号である
請求項1に記載の車両周辺監視装置。 - マイクロフォンからの周辺音により前記対象車両が存在するか否かを判定して前記危険判定部に与える音響処理部をさらに備え、前記危険判定部は、前記周辺音が検知されたことを条件として前記判定を行う
請求項1に記載の車両周辺監視装置。 - 前記危険判定部は、カーナビゲーションシステムからの自車両の現在地情報から、前記自車両が駐車場に位置している場合にのみ前記判定を行う
請求項1に記載の車両周辺監視装置。 - カメラ映像信号から、対象車両の移動推定エリアを算出し、
センサ信号から、自車両の移動推定経路を算出し、
前記対象車両の移動推定エリアに前記自車両の移動推定経路が一定時間後に進入するか否か判定し、
進入すると判定されたとき、警告信号を出力する
車両周辺監視方法。 - 請求項16に記載の車両周辺監視方法をコンピュータに実行させる車両周辺監視プログラム。
- 請求項17に記載の車両周辺監視プログラムを記憶したコンピュータ読み取り可能な記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016044326A JP6198871B2 (ja) | 2016-03-08 | 2016-03-08 | 車両周辺監視装置、車両周辺監視方法、及び車両周辺監視プログラムとその記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016044326A JP6198871B2 (ja) | 2016-03-08 | 2016-03-08 | 車両周辺監視装置、車両周辺監視方法、及び車両周辺監視プログラムとその記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017162075A true JP2017162075A (ja) | 2017-09-14 |
| JP6198871B2 JP6198871B2 (ja) | 2017-09-20 |
Family
ID=59857761
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016044326A Expired - Fee Related JP6198871B2 (ja) | 2016-03-08 | 2016-03-08 | 車両周辺監視装置、車両周辺監視方法、及び車両周辺監視プログラムとその記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6198871B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022077417A (ja) * | 2020-11-11 | 2022-05-23 | 日産自動車株式会社 | 推奨ドア案内装置及び推奨ドア案内方法 |
| US12179753B2 (en) | 2019-08-29 | 2024-12-31 | Denso Corporation | Vehicle collision determination apparatus |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000242898A (ja) * | 1999-02-22 | 2000-09-08 | Equos Research Co Ltd | 周辺車両報知装置 |
| JP2004295472A (ja) * | 2003-03-27 | 2004-10-21 | Aisin Seiki Co Ltd | 車両用警報装置 |
| JP2009211309A (ja) * | 2008-03-03 | 2009-09-17 | Honda Motor Co Ltd | 走行支援装置 |
| JP2011034436A (ja) * | 2009-08-04 | 2011-02-17 | Nissan Motor Co Ltd | 車両位置演算装置及び車両位置演算方法 |
| JP2012033075A (ja) * | 2010-07-30 | 2012-02-16 | Toyota Motor Corp | 行動予測装置及び行動予測方法及び運転支援装置 |
-
2016
- 2016-03-08 JP JP2016044326A patent/JP6198871B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000242898A (ja) * | 1999-02-22 | 2000-09-08 | Equos Research Co Ltd | 周辺車両報知装置 |
| JP2004295472A (ja) * | 2003-03-27 | 2004-10-21 | Aisin Seiki Co Ltd | 車両用警報装置 |
| JP2009211309A (ja) * | 2008-03-03 | 2009-09-17 | Honda Motor Co Ltd | 走行支援装置 |
| JP2011034436A (ja) * | 2009-08-04 | 2011-02-17 | Nissan Motor Co Ltd | 車両位置演算装置及び車両位置演算方法 |
| JP2012033075A (ja) * | 2010-07-30 | 2012-02-16 | Toyota Motor Corp | 行動予測装置及び行動予測方法及び運転支援装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12179753B2 (en) | 2019-08-29 | 2024-12-31 | Denso Corporation | Vehicle collision determination apparatus |
| JP2022077417A (ja) * | 2020-11-11 | 2022-05-23 | 日産自動車株式会社 | 推奨ドア案内装置及び推奨ドア案内方法 |
| JP7543859B2 (ja) | 2020-11-11 | 2024-09-03 | 日産自動車株式会社 | 推奨ドア案内装置及び推奨ドア案内方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6198871B2 (ja) | 2017-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111361552B (zh) | 自动驾驶系统 | |
| CN105774806B (zh) | 车辆行驶控制装置 | |
| JP6611085B2 (ja) | 車両制御装置 | |
| RU2689930C2 (ru) | Транспортное средство (варианты) и способ предупреждения о столкновении транспортного средства на основе времени до столкновения | |
| JP6342856B2 (ja) | 車両制御装置 | |
| JP6241235B2 (ja) | 車両用運転支援装置 | |
| US11238739B2 (en) | Method and apparatus to prevent VRU accidents | |
| US20190351900A1 (en) | Driving assistance apparatus and driving assistance method | |
| EP2687407B1 (en) | Apparatus and method for localizing sound image for vehicle's driver | |
| JP2010125923A (ja) | 緊急退避装置 | |
| JP2016199262A (ja) | 後退走行中の前輪軌道逸脱に基づく衝突の回避 | |
| JP2019505883A (ja) | 緊急車両との自動車の衝突防止方法とその方法に関するシステム及び自動車 | |
| KR101984520B1 (ko) | 차량 충돌 방지 장치 및 방법 | |
| JP7287301B2 (ja) | 死角情報取得装置、死角情報取得方法、車両及びプログラム | |
| KR101545054B1 (ko) | 풍속 측정 기반의 제동장치 및 그 제어방법 | |
| JP6611083B2 (ja) | 車両制御装置 | |
| KR20180126224A (ko) | 차량 주행 중 장애물 정보 제공 장치 및 방법 | |
| CN117048630A (zh) | 用于响应紧急情况的方法和设备 | |
| WO2019003792A1 (ja) | 制御装置、制御方法、及びプログラム | |
| JP2019137158A (ja) | 駐車支援装置 | |
| JP2009140145A (ja) | 車両の走行支援装置 | |
| JP6198871B2 (ja) | 車両周辺監視装置、車両周辺監視方法、及び車両周辺監視プログラムとその記録媒体 | |
| JP6604368B2 (ja) | 車両制御装置 | |
| JP6648551B2 (ja) | 自動運転装置 | |
| US20250242800A1 (en) | Driving assistance device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170608 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170725 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170822 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6198871 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |