JP2017163672A - 電力変換装置および電力変換装置の制御方法 - Google Patents
電力変換装置および電力変換装置の制御方法 Download PDFInfo
- Publication number
- JP2017163672A JP2017163672A JP2016044993A JP2016044993A JP2017163672A JP 2017163672 A JP2017163672 A JP 2017163672A JP 2016044993 A JP2016044993 A JP 2016044993A JP 2016044993 A JP2016044993 A JP 2016044993A JP 2017163672 A JP2017163672 A JP 2017163672A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- value
- power
- deceleration pattern
- semiconductor element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Inverter Devices (AREA)
Abstract
【課題】電力用半導体素子の寿命値をより正確に取得することが可能な電力変換装置および電力変換装置の制御方法を提供する。
【解決手段】この電力変換装置100は、電力変換を行うとともに、電力変換された電力を負荷装置102に供給する電力用半導体素子13と、電力用半導体素子13の駆動を制御する制御部3とを備え、制御部3は、負荷装置102を駆動させる速度の加減速パターン51を設定する加減速パターン設定部31と、設定された加減速パターン51に基づいて、パワーサイクル寿命値PCを取得する寿命取得部33とを含む。
【選択図】図1
【解決手段】この電力変換装置100は、電力変換を行うとともに、電力変換された電力を負荷装置102に供給する電力用半導体素子13と、電力用半導体素子13の駆動を制御する制御部3とを備え、制御部3は、負荷装置102を駆動させる速度の加減速パターン51を設定する加減速パターン設定部31と、設定された加減速パターン51に基づいて、パワーサイクル寿命値PCを取得する寿命取得部33とを含む。
【選択図】図1
Description
この発明は、電力変換装置および電力変換装置の制御方法に関し、特に、寿命取得部を備える電力変換装置および電力変換装置の制御方法に関する。
従来、寿命取得部を備える電力変換装置および電力変換装置の制御方法が知られている(たとえば、特許文献1参照)。
上記特許文献1には、寿命監視装置を備えたインバータが開示されている。このインバータには、パワースイッチング素子と、パワースイッチング素子の駆動を制御する制御回路とが設けられている。また、寿命監視装置には、メモリと、入力回路と、基準値演算回路と、カウンタとが設けられている。そして、基準値演算回路は、入力回路により設定されたジャンクション温度差の値を取得するとともに、メモリからジャンクション温度差の値とパワーサイクルとの相関関係を示すテーブルを読み出すように構成されている。また、カウンタは、パワースイッチング素子に与えられる運転指令の回数(オンの回数)をカウントするように構成されている。そして、基準値演算回路は、カウンタによるカウント数が、ジャンクション温度差の値とテーブルとに基づく設定値を超えた時に、警報信号を制御回路に伝達するように構成されている。そして、制御回路は、警報信号を取得した場合には、パワースイッチング素子の駆動を停止するように構成されている。また、ジャンクション温度差の値は、1点の固定値であり操作者が選んだ値に設定されている。
ここで、パワースイッチング素子のジャンクション温度差(温度上昇値)は、パワースイッチング素子の駆動パターン(負荷装置を駆動させる加減速パターン)に応じて異なる。たとえば、加速中の温度上昇値と減速中の温度上昇値とは、異なる場合がある。また、加速中または減速中においても、温度の上昇下降は繰り返され、温度上昇値は、1点の固定値とはならない。しかしながら、上記特許文献1に記載されたインバータでは、ジャンクション温度差の値(温度上昇値)は、1点の固定値(操作者が選んだ値)に設定されている。したがって、上記特許文献1のインバータでは、温度上昇値として1点の固定値を用いているため、負荷装置を駆動させる加減速パターンに対応して正確にパワースイッチング素子のパワーサイクル(寿命値)を演算することが困難である。すなわち、上記特許文献1のインバータ(電力変換装置)では、パワースイッチング素子(電力用半導体素子)の寿命値を正確に取得することが困難であるという問題点がある。
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、電力用半導体素子の寿命値をより正確に取得することが可能な電力変換装置および電力変換装置の制御方法を提供することである。
上記目的を達成するために、この発明の第1の局面による電力変換装置は、電力変換を行うとともに、電力変換された電力を負荷装置に供給する電力用半導体素子と、電力用半導体素子の駆動を制御する制御部とを備え、制御部は、負荷装置を駆動させる速度の加減速パターンを設定する加減速パターン設定部と、設定された加減速パターンに基づいて、電力用半導体素子の寿命値を取得する寿命取得部とを含む。
この発明の第1の局面による電力変換装置では、上記のように、寿命取得部を、加減速パターンに基づいて、電力用半導体素子の寿命値を取得するように構成する。これにより、温度上昇値が操作者により1点の固定値が選択されるように構成する場合と異なり、負荷装置の加減速パターン(加速時の温度上昇値および減速時の温度上昇値)に応じた電力用半導体素子の寿命値を取得することができる。その結果、電力用半導体素子の寿命値をより正確に取得することができるので、寿命値が正確に取得されないことに起因して、予定した交換時期(予測した故障時期)以外の時期に電力用半導体素子が寿命を向かえる(故障する)ことを抑制することができる。また、加減速パターンに基づいて、電力用半導体素子の寿命値を取得することによって、温度上昇値を実測する必要がないので、電力用半導体素子(電力変換装置)を駆動させることなく、負荷装置の運転を行う前に、電力用半導体素子の寿命値を取得することができる。
上記第1の局面による電力変換装置において、好ましくは、寿命取得部は、加減速パターンに基づいて、負荷装置の加減速トルク値を取得するトルク取得部と、加減速トルク値に基づいて、負荷装置に供給される電力の出力電流値および出力電圧値を取得する電流電圧取得部と、出力電流値および出力電圧値に基づいて、電力用半導体素子の電力損失を取得する損失取得部と、電力用半導体素子の電力損失に基づいて、電力用半導体素子の温度上昇値を取得する温度取得部と、温度上昇値に基づいて、電力用半導体素子の寿命値としてのパワーサイクル寿命値を取得するパワーサイクル寿命取得部とを含む。このように構成すれば、加減速パターンに基づいて、温度上昇値を取得することができるので、温度上昇値を実測することなく、電力用半導体素子の寿命値を取得することができる。その結果、温度上昇値を実測するための温度検出器を設ける必要がない分、電力変換装置の構成が複雑化することを抑制することができる。
上記第1の局面による電力変換装置において、好ましくは、加減速パターン設定部は、取得された電力用半導体素子の寿命値に基づいて、加減速パターンを再設定するように構成されており、再設定される加減速パターンに基づく電力用半導体素子の寿命値が寿命取得部により取得された電力用半導体素子の寿命値よりも大きくなるように、加減速パターンを再設定するように構成されている。このように構成すれば、自動的に電力用半導体素子の寿命値を大きくすることができる。
この場合、好ましくは、加減速パターン設定部は、加減速パターンの加速または減速のうちの少なくとも一方の速度変化率を変更する再設定を行うことによって、再設定される加減速パターンに基づく電力用半導体素子の寿命値が寿命取得部により取得された電力用半導体素子の寿命値よりも大きくなるように、加減速パターンを再設定するように構成されている。ここで、加減速パターンの加速または減速のうちの少なくとも一方の速度変化率を変更する(たとえば、小さくする)再設定を行うことにより、電力用半導体素子の温度上昇値を再設定前よりも小さくすることができる。この点に着目して、本発明では、上記のように構成することにより、加速期間または減速期間の温度上昇値を小さくすることができるので、容易に電力用半導体素子の寿命値を大きくすることができる。
上記加減速パターンを再設定する加減速パターン設定部を備える電力変換装置において、好ましくは、寿命取得部は、加減速パターンに基づいて、電力用半導体素子の温度上昇値を取得する温度取得部を含むとともに、温度取得部により取得された温度上昇値に基づいて、電力用半導体素子の寿命値を取得するように構成されており、加減速パターン設定部は、温度取得部により取得された温度上昇値よりも再設定される加減速パターンによる温度上昇値が小さくなるように加減速パターンを再設定することにより、再設定される加減速パターンに基づく電力用半導体素子の寿命値が寿命取得部により取得された電力用半導体素子の寿命値よりも大きくするように構成されている。このように構成すれば、温度取得部により取得された温度上昇値よりも再設定される加減速パターンによる温度上昇値が小さくなるので、温度上昇値が小さくなる分、再設定される加減速パターンに基づく電力用半導体素子の寿命値を寿命取得部により取得された電力用半導体素子の寿命値よりも大きくすることができる。
上記加減速パターンを再設定する加減速パターン設定部を備える電力変換装置において、好ましくは、加減速パターン設定部は、再設定される加減速パターンに基づく電力用半導体素子の寿命値が所定の寿命値に略一致するように、加減速パターンを再設定するように構成されている。このように構成すれば、たとえば、所定の寿命値を定期メンテナンス期間に対応するように設定することができるので、電力用半導体素子が定期メンテナンス期間(時期)とは異なる時期に破損する場合が生じるのを抑制することができる。その結果、定期メンテナンス以外の時期にメンテナンスを行う回数を減少させることができるので、メンテナンスの回数を削減することができる。
上記加減速パターンを再設定する加減速パターン設定部を備える電力変換装置において、好ましくは、電力変換装置は、複数設けられており、寿命取得部は、複数の電力変換装置のそれぞれの加減速パターンに基づいて、複数の電力変換装置のそれぞれの電力用半導体素子の寿命値を取得するように構成されており、加減速パターン設定部は、再設定される複数の電力変換装置のそれぞれの電力用半導体素子の寿命値同士が略一致するように、加減速パターンを再設定するように構成されている。このように構成すれば、複数の電力変換装置のそれぞれの電力用半導体素子の寿命値同士を略一致することができるため、複数の電力変換装置のメンテナンス(交換)を同時に行う場合に、寿命値が小さい電力用半導体素子を有する電力変換装置の交換に合わせて、寿命値が大きい電力用半導体素子を有する電力変換装置の交換が行われることを抑制することができる。また、複数の電力変換装置をそれぞれ個別にメンテナンス(交換)することが可能な場合でも、複数の電力変換装置の寿命値同士を略一致することができるので、1回のメンテナンスの際に互いに寿命値が略一致する複数の電力変換装置を同時に交換することができる。その結果、メンテナンス回数を削減することができる。
この発明の第2の局面による電力変換装置の制御方法は、電力変換された電力を負荷装置に供給する電力用半導体素子と、電力用半導体素子の駆動を制御する制御部とを備える電力変換装置の制御方法であって、負荷装置を駆動させる速度の加減速パターンを設定し、設定された加減速パターンに基づいて、電力用半導体素子の寿命値を取得する。
この発明の第2の局面による電力変換装置の制御方法では、上記のように、加減速パターンに基づいて、電力用半導体素子の寿命値を取得する。このように構成すれば、電力用半導体素子の寿命値をより正確に取得することが可能な電力変換装置の制御方法を提供することができる。
本発明によれば、上記のように、電力用半導体素子の寿命値をより正確に取得することができる。
以下、本発明を具体化した実施形態を図面に基づいて説明する。
[第1実施形態]
図1〜図8を参照して、第1実施形態による電力変換装置100の構成について説明する。図1では、電力変換装置100の電気回路図を示している。
図1〜図8を参照して、第1実施形態による電力変換装置100の構成について説明する。図1では、電力変換装置100の電気回路図を示している。
(電力変換装置の構成)
図1に示すように、電力変換装置100は、直流出力回路101からの直流の電力を交流の電力に電力変換するとともに、電力変換された電力を負荷装置102に供給するように構成されている。すなわち、電力変換装置100は、インバータとして構成されている。たとえば、直流出力回路101は、直流電源、または、交流電源および整流回路のいずれか一方を含む。また、負荷装置102は、たとえば、交流電動機(たとえば、モータ)として構成されており、電力変換装置100からの電力により駆動(たとえば、回転駆動)するように構成されている。
図1に示すように、電力変換装置100は、直流出力回路101からの直流の電力を交流の電力に電力変換するとともに、電力変換された電力を負荷装置102に供給するように構成されている。すなわち、電力変換装置100は、インバータとして構成されている。たとえば、直流出力回路101は、直流電源、または、交流電源および整流回路のいずれか一方を含む。また、負荷装置102は、たとえば、交流電動機(たとえば、モータ)として構成されており、電力変換装置100からの電力により駆動(たとえば、回転駆動)するように構成されている。
電力変換装置100には、スイッチング回路1とコンデンサ2とが設けられている。スイッチング回路1は、スイッチング素子11a〜11fと、ダイオード12a〜12fとを含む。なお、スイッチング素子11a〜11fおよびダイオード12a〜12fは、特許請求の範囲の「電力用半導体素子」の一例である。また、以下の記載において、スイッチング素子11a〜11fと、ダイオード12a〜12fとを、特に区別せずに説明する場合には、「電力用半導体素子13」として記載している。
スイッチング素子11a〜11fは、たとえば、IGBT(Insulated Gate Bipolar Transistor)、または、MOSFETなどの半導体素子により構成されている。そして、スイッチング素子11a〜11fは、図1に示すように、3相ブリッジを形成するように接続されている。すなわち、電力変換装置100は、3相ブリッジインバータとして構成されている。
そして、スイッチング素子11a〜11fは、制御部3からの制御信号に基づいて、オンオフするように構成されており、直流出力回路101からの直流の電力(電圧)をオンオフすることにより、交流の電力に電力変換を行うとともに、電力変換された電力を負荷装置102に供給するように構成されている。
ダイオード12a〜12fは、たとえば、ファーストリカバリーダイオード(FRD)またはショットキーバリアダイオードなどの半導体素子により構成されている。そして、ダイオード12a〜12fは、それぞれ、スイッチング素子11a〜11fに並列(逆並列)に接続されている。
コンデンサ2は、平滑コンデンサとして機能する。そして、コンデンサ2は、スイッチング回路1の両端の間に接続されており、直流出力回路101からの電流波形(整流波形)を平滑して、平滑された電力を、スイッチング回路1に供給するように構成されている。
また、電力変換装置100には、制御部3と操作部4と記憶部5とが設けられている。制御部3は、たとえば、CPU(Central Processing Unit)等からなり、電力変換装置100のスイッチング回路1(スイッチング素子11a〜11f)の駆動を制御することにより、負荷装置102の駆動を制御するように構成されている。
操作部4は、操作者からの設定操作を受け付けるように構成されており、たとえば、キーボードや表示部等により構成されている。記憶部5は、たとえば、不揮発性メモリ等により構成されており、後述する加減速パターン51、温度パワーサイクルの情報52、負荷装置の情報53および定期メンテナンス期間の情報54などを記憶可能に構成されている。
ここで、第1実施形態では、図2に示すように、制御部3は、加減速パターン設定部31と、駆動制御部32と、寿命取得部33とを含む。なお、図2では、制御部3の各部を、機能ブロックとして図示しているが、それぞれ別々のハードウェアとして構成されていてもよいし、複数の機能ブロックを含むハードウェアとして構成されていてもよい。
加減速パターン設定部31は、図3に示すように、負荷装置102を駆動させる速度の加減速パターン51を設定する制御を行うように構成されている。具体的には、加減速パターン設定部31は、操作部4により受け付けた操作者の設定操作に基づいて、加減速パターン51を生成するか、または、記憶部5から加減速パターン51を読み出すことにより、加減速パターン51を設定するように構成されている。
ここで、図3に示すように、加減速パターン51は、時間tと速度ωとの関係を示す情報を含む。なお、「速度ω」とは、負荷装置102が回転電機からなるモータとして構成されている場合には、たとえば、回転速度ω[r/s]である。また、「位置N」は、たとえば、回転位置[r(回転数)]または[rad]の情報として表すことが可能である。
図3では、加減速パターン51の一例を示しており、横軸を時間t[s]、縦軸を速度ω[r/s](および位置N[r])として図示している。具体的には、時間t(時刻)が0sから0.01sまでの間は、速度ωが0[r/s]の期間の(停止期間TS1)である。そして、時間tが0.01sから0.06sまでの間は、速度ωが0[r/s]から50[r/s]まで一定の速度変化率で加速する期間(加速期間TS2)である。そして、時間t(時刻)が0.06sから0.11sまでの間は、速度ωが50[r/s]の等速度となる期間(等速期間TS3)である。そして、時間tが0.11sから0.16sまでの間は、速度ωが50[r/s]から0[r/s]まで一定の速度変化率で減速する期間(減速期間TS4)である。そして、時間tが0.16sから0.2sまでの間は、速度ωが0[r/s]の期間(停止期間TS5)である。この動作により、負荷装置102の位置Nが0[r]から5[r]まで移動される(負荷が5回転する)。
また、加減速パターン51は、制御部5が位置決め制御することが可能に構成する場合には、時間tと位置Nとの対応関係を示す情報(点線)も含んでいる。
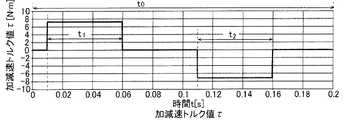
そして、加減速パターン設定部31は、実効トルク値τRMSが定格トルクτrate以下になるように、加減速パターン51を設定するように構成されている。ここで、実効トルク値τRMSは、加減速パターン51の1サイクル期間をt0、τnを発生トルク値、tnをn番目(nは自然数)のトルク発生時間(なお、図4には、t0、t1およびt2を図示している)として、以下の式(1)に表すことが可能である。なお、発生トルク値τnの取得方法は、後述する。

したがって、加減速パターン設定部31は、実効トルク値τRMSを取得(推定、演算)して、実効トルク値τRMSが定格トルクτrate以下で、かつ、所望の実効トルク値τRMSになるように、加速および減速の期間を増大または減少させるか、1サイクル期間t0を増大または減少させるように構成されている。そして、加減速パターン設定部31は、実効トルクτRMSが、所望の実効トルク値τRMSになった状態で、加減速パターン51を設定するように構成されている。
図2に示すように、駆動制御部32は、スイッチング回路1のスイッチング素子11a〜11fのそれぞれに、制御信号を伝達して、スイッチング素子11a〜11fをそれぞれオンオフさせるように構成されている。具体的には、駆動制御部32は、たとえば、操作部4からの負荷装置102の運転を開始させるための入力操作を受け付けた場合に、加減速パターン51および負荷装置の情報53に基づいて、スイッチング回路1に制御信号を伝達するように構成されている。これにより、負荷装置102では、加減速パターン51に沿った駆動が行われる。
ここで、第1実施形態では、寿命取得部33は、加減速パターン設定部31により設定された加減速パターン51に基づいて、電力用半導体素子13の寿命値(パワーサイクル寿命値PC)を取得するように構成されている。具体的には、第1実施形態では、寿命取得部33は、トルク取得部34と、電流電圧取得部35と、損失取得部36と、温度取得部37と、パワーサイクル取得部38とを含む。
トルク取得部34は、図4に示すように、加減速パターン51に基づいて、負荷装置102の加減速トルク値τを取得するように構成されている。具体的には、トルク取得部34は、加減速パターン51と負荷装置の情報53とに基づくとともに、負荷装置102の慣性モーメントをJ[kg・m2]および負荷装置102の回転速度をω[rad/s]として、以下の式(2)を用いて、加減速トルク値τを取得(演算、推定)するように構成されている。なお、回転速度ωは、数式中では、[rad/s]、図中では[r(回転数)/s]として表している。
また、負荷装置102を等加速度運転させる場合には、トルク取得部34は、以下の式(3)により加減速トルク値τを取得するように構成されている。また、トルク取得部34は、上記式(1)を用いることにより、実効トルク値τRMSを取得(算出)することが可能に構成されている。
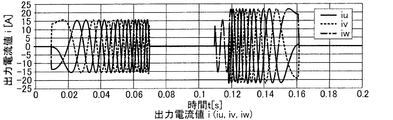
電流電圧取得部35は、図5に示すように、トルク取得部34により取得された加減速トルク値τに基づいて、負荷装置102に供給される電力の出力電流値i(iu、ivおよびiw)を取得するように構成されている。たとえば、負荷装置102がSPM(Surface Permanent Magnet)同期モータを含んでいる場合には、電流電圧取得部35は、以下の式(4)および(5)を用いて、出力電流値iを取得(算出)することが可能である。なお、iqは、モータをd−q座標で表した場合のq軸電流、KTはトルク定数である。また、図3に示す例の加減速パターン51に基づく出力電流値iの波形は、図5に示される。
また、電流電圧取得部35は、トルク取得部34により取得された加減速トルク値τに基づいて、負荷装置102に供給される電力の出力電圧値(端子電圧)V(Vu、VvおよびVw)を取得するように構成されている。具体的には、電流電圧取得部35は、Rをモータ(負荷装置102)の1次巻線抵抗値、Lをインダクタンス、ωeを界磁の角速度、θeを界磁の角度、および、Keを誘起電圧定数として、以下の式(6)および(7)を用いて、出力電圧値Vを取得(算出)するように構成されている。
すなわち、KT、R、L、Keは、モータ(負荷装置102)の固有の値であるとともに、負荷装置の情報53に含まれている情報である。これにより、電流電圧取得部35は、加減速パターン51(加減速トルク値τ)と、選択された負荷装置102の情報(負荷装置の情報53)とに基づいて、出力電流値iと、出力電圧値Vとを取得することが可能に構成されている。
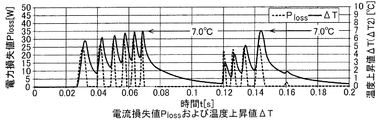
損失取得部36は、図6に示すように、電流電圧取得部35により取得された出力電流値iおよび出力電圧値Vに基づいて、電力用半導体素子13の電力損失値P(Ploss)を取得するように構成されている。ここで、電力損失値P(Ploss)は、ターンオン、ターンオフ、または、逆回復動作に伴い発生するスイッチング損失Pswと、オン状態で電力用半導体素子13に電流が流れることにより発生する導通損失Pstaとを含む。
具体的には、損失取得部36は、1回のスイッチング動作で発生する損失値Esw[J]を、たとえば、asw、bsw、および、cswを定数とし、電力用半導体素子13を流れる電流iの関数として、以下の式(8)を用いて、取得(算出)するように構成されている。なお、電流値iと損失値Eswとの関係式は、以下の式(8)に限らず、指数関数や対数関数などを用いた関係式としてもよい。
ここで、上記の定数asw、bsw、および、cswは、電力用半導体素子13の固有の値であり、予め、電力用半導体素子13に流れる電流値とスイッチング損失との関係から算出(取得)されている値である。なお、定数asw、bsw、および、cswは、記憶部5に記憶されている。たとえば、スイッチング素子11a〜11fの場合には、スイッチング素子11a〜11fに流れる電流値と、ターンオン損失およびターンオフ損失との関係から定数asw、bsw、および、cswが取得されている。また、ダイオード12a〜12fの場合には、ダイオード12a〜12fに流れる電流値と、逆回復損失との関係から定数asw、bsw、および、cswが設定されている。
そして、損失取得部36は、取得した1回(スイッチング動作)当たりの損失値Eswに、スイッチング周波数fswを乗じることにより、スイッチング動作の1周期(1秒)あたりの損失値Psw[W]を取得するように構成されている。すなわち、損失取得部36は、以下の式(9)を用いて、Psw[W]を取得するように構成されている。
また、損失取得部36は、導通損失Pstaを、オン電圧値Von(スイッチング素子11a〜11fの場合はコレクタ‐エミッタ間の飽和電圧であり、ダイオード12a〜12fの場合は順方向電圧)と、電流値iと導通期間Tstaの積として取得するように構成されている。すなわち、損失取得部36は、以下の式(10)を用いて、Psta[W]を取得するように構成されている。
また、損失取得部36は、オン電圧値Vonを、たとえば、aon、bon、および、conを定数とし、電力用半導体素子13を流れる電流iの関数として、以下の式(11)を用いて、取得(算出)するように構成されている。なお、電流値iとオン電圧値Vonとの関係式は、以下の式(11)に限らず、指数関数や対数関数などを用いた関係式としてもよい。
ここで、上記の定数aon、bon、および、conは、電力用半導体素子13の固有の値であり、予め、電力用半導体素子13に流れる電流値とオン電圧値との関係から算出(設定)されている値である。なお、定数aon、bon、および、conは、記憶部5に記憶されている。
また、導通期間Tstaは、直流電圧Vdcとの出力電圧値(端子電圧)V(Vu、Vv、Vw)の比率で定まり、スイッチング素子11a〜11fの場合には、下記の式(12)となり、ダイオード12a〜12fの場合には、下記の式(13)となる。
そして、温度取得部37は、電力用半導体素子13の電力損失値Ploss(Psw+Psta)に基づいて、電力用半導体素子13の温度上昇値ΔTを取得するように構成されている。たとえば、温度取得部37は、電力用半導体素子13の温度上昇値ΔTを、電力損失値PswおよびPstaと過渡熱抵抗Rth[℃/W]との積として取得するように構成されている。
図7に示すように、電力用半導体素子13の温度上昇値ΔTは、過渡熱抵抗Rth1〜nと熱容量Cth1〜nの直並列回路モデルとして表すことが可能である。すなわち、温度上昇値ΔTn=1の状態方程式は、過渡熱抵抗Rth1と、熱容量Cth1と、電力損失値Plossとを用いて、以下の式(14)となる。
上記の式(14)における微分を数値計算により算出するために差分で表し変形すると、以下の式(15)となる。なお、Δtは、サンプリング周期であり、ΔTn=1(n−1)は、1サンプル前の温度上昇値である。
これにより、温度取得部37は、ΔTn=1〜ΔTn=nを取得(算出)するとともに、それらの和算することにより、温度上昇値ΔTを取得することが可能に構成されている。したがって、制御部3は、加減速パターン51(位置の情報および速度の情報)に基づいて、電力用半導体素子13の温度上昇値ΔTを取得することが可能に構成されている。
パワーサイクル取得部38は、図8に示すように、温度取得部37により取得された温度上昇値ΔTに基づいて、電力用半導体素子13の寿命値としてのパワーサイクル寿命値PC(パワーサイクル数)を取得するように構成されている。具体的には、記憶部5には、温度上昇値ΔTとパワーサイクル寿命値PCとの対応関係を示す情報(たとえば、テーブル)としての温度パワーサイクルの情報52(図2参照)が予め記憶されている。そして、パワーサイクル取得部38は、温度上昇値ΔTと温度パワーサイクルの情報52とに基づいて、温度上昇値ΔTに対応するパワーサイクル寿命値PCを取得するように構成されている。
たとえば、図8に示すように、パワーサイクル取得部38は、温度取得部37により取得された温度上昇値ΔTが8.5℃(K)の場合、パワーサイクル寿命値PCを3.86×1012回として取得する。
詳細には、図6に示すように、パワーサイクル取得部38は、加減速パターン51の1サイクル中の温度上昇および温度下降の数をカウントするように構成されている。たとえば、図6の例の場合では、加速期間TS2に5回の温度上昇および温度下降が生じ、減速期間TS4に5回の温度上昇および温度下降が生じる。パワーサイクル取得部38は、これらのそれぞれの温度上昇値ΔTを取得して、取得した温度上昇値ΔTと温度パワーサイクルの情報52(図8参照)とに基づいて、それぞれの温度上昇値ΔTに対応するパワーサイクル寿命値PC(k)を取得するように構成されている。なお、kは自然数であり、kの最大値は、図6の例の場合、10である。
そして、パワーサイクル取得部38は、取得したパワーサイクル寿命値PC(k)に基づくとともに、以下の式(16)を用いて、加減速パターン51の1サイクル(0sから0.2sまで)のパワーサイクル寿命値PCを取得(算出、演算、推定)するように構成されている。
また、制御部3は、パワーサイクル寿命値PCから故障予測時期(運転寿命期間)を推定するように構成されている。その結果、操作者により、故障予測時期に応じて定期メンテナンスの時期を設定することが可能となる。
(電力変換装置の制御方法)
次に、図9を参照して、第1実施形態による電力変換装置100の制御方法について説明する。図9では、電力変換装置100の制御処理フローを示している。なお、図9に示す処理は、制御部3により実行されている。
次に、図9を参照して、第1実施形態による電力変換装置100の制御方法について説明する。図9では、電力変換装置100の制御処理フローを示している。なお、図9に示す処理は、制御部3により実行されている。
ここで、第1実施形態では、制御部3により、負荷装置102を駆動させる速度の加減速パターン51が設定され、設定された加減速パターン51に基づいて、電力用半導体素子13の寿命値としてのパワーサイクル寿命値PCが取得される。
まず、ステップS1において、加減速パターン設定部31により、加減速パターン51(図3参照)が設定される。具体的には、操作部4により受け付けた操作者の設定操作に基づいて、生成された加減速パターン51か、または、記憶部5から読み出された加減速パターン51が設定される。その後、ステップS2に進む。
そして、ステップS2において、トルク取得部34により、加減速トルク値τ(上記(2)参照および図4参照)が取得されるとともに、実効トルク値τRMS(上記(1)参照)が取得される。その後、ステップS3に進む。
そして、ステップS3において、実効トルク値τRMSに基づいて、電力変換装置100および負荷装置102の選定が行われ、選定された負荷装置102の情報(負荷装置102の情報53)が記憶部5から読み出される。なお、電力変換装置100の選定は、電力変換装置100が複数設けられている場合に実行され、実効トルク値τRMSよりも大きい値の定格トルク値τrateを有する電力変換装置100が選定される。その後、ステップS4に進む。
そして、ステップS4において、操作者からの設定操作に基づいて、加減速パターン51の設定が完了したか否かが判断される。たとえば、操作者が一旦設定された加減速パターン51を修正することを望む場合には、加減速パターン51の設定が完了していないとする設定操作がなされ、ステップS1に戻る。また、操作者が、加減速パターン51の設定が完了されているとする場合には、加減速パターン51の設定が完了したとする設定操作がなされ、ステップS5に進む。
そして、ステップS5において、電流電圧取得部35により、加減速トルク値τに基づいて、負荷装置102に供給される電力の出力電流値i(iu、ivおよびiw)(上記式(4)および(5)および図5参照)および出力電圧値(端子電圧)V(Vu、VvおよびVw)(上記式(6)および(7)参照)が取得される。その後、ステップS6に進む。
そして、ステップS6において、損失取得部36により、出力電流値iおよび出力電圧値Vに基づいて、電力用半導体素子13の電力損失値Ploss(Psw+Psta)(上記式(8)〜(10)および図6参照)が取得される。その後、ステップS7に進む。
そして、ステップS7において、温度取得部37により、電力用半導体素子13の電力損失値Plossに基づいて、電力用半導体素子13の温度上昇値ΔT(上記式(11)〜(15)参照および図6参照)が取得される。その後、ステップS8に進む。
そして、ステップS8において、パワーサイクル取得部38により、加減速パターン51に基づくパワーサイクル寿命値PC(上記式(16)および図8参照)が取得される。なお、この後、制御部3により、パワーサイクル寿命値PCに基づいて、故障予測時期や運転寿命期間等が取得(推定、算出)されてもよい。その後、第1実施形態による電力変換装置100の制御処理フローが終了される。
[第1実施形態の効果]
第1実施形態では、以下のような効果を得ることができる。
第1実施形態では、以下のような効果を得ることができる。
第1実施形態では、上記のように、制御部3に、加減速パターン51に基づいて、電力用半導体素子13の寿命値としてのパワーサイクル寿命値PCを取得する寿命取得部22を設ける。これにより、加減速パターン51に基づいて、電力用半導体素子13の寿命値を取得することができるので、温度上昇値ΔTが操作者により1点の固定値が選択されるように構成する場合に比べて、負荷装置102の加減速パターン51(加速期間TS2の温度上昇値ΔTおよび減速期間TS4の温度上昇値ΔT)に応じた電力用半導体素子13の寿命値を取得することができる。その結果、電力用半導体素子13の寿命値をより正確に取得することができる。そして、電力用半導体素子13の寿命値をより正確に取得することができることにより、寿命値が正確に取得されないことに起因して、予定した交換時期(予測した故障時期)以外の時期に電力用半導体素子13が寿命を向かえる(故障する)ことを抑制することができる。また、加減速パターン51に基づいて、電力用半導体素子の寿命値を取得することによって、温度上昇値を実測する必要がないので、電力用半導体素子13(電力変換装置100)を駆動することなく、電力用半導体素子13の寿命値を取得することができる。
また、第1実施形態では、上記のように、寿命取得部33に、加減速パターン51に基づいて、負荷装置102の加減速トルク値τを取得するトルク取得部34と、加減速トルク値τに基づいて、負荷装置102に供給される電力の出力電流値iおよび出力電圧値Vを取得する電流電圧取得部35と、出力電流値iおよび出力電圧値Vに基づいて、電力用半導体素子13の電力損失値Plossを取得する損失取得部36と、電力用半導体素子の電力損失値Plossに基づいて、電力用半導体素子13の温度上昇値ΔTを取得する温度取得部37と、温度上昇値ΔTに基づいて、電力用半導体素子13の寿命値としてのパワーサイクル寿命値PCを取得するパワーサイクル取得部38とを設ける。これにより、加減速パターン51に基づいて、温度上昇値ΔTを取得することができるので、温度上昇値を実測することなく、電力用半導体素子13の寿命値を取得することができる。その結果、温度上昇値を実測するための温度検出器を設ける必要がない分、電力変換装置100の構成が複雑化することを抑制することができる。
[第2実施形態]
次に、図1および図2を参照して、第2実施形態による電力変換装置200の構成について説明する。第2実施形態では、第1実施形態による電力変換装置100と異なり、パワーサイクル寿命値PC1に基づいて、加減速パターン51を加減速パターン51aに再設定するように構成されている。なお、上記第1実施形態と同一の構成については、同じ符号を付してその説明を省略する。
次に、図1および図2を参照して、第2実施形態による電力変換装置200の構成について説明する。第2実施形態では、第1実施形態による電力変換装置100と異なり、パワーサイクル寿命値PC1に基づいて、加減速パターン51を加減速パターン51aに再設定するように構成されている。なお、上記第1実施形態と同一の構成については、同じ符号を付してその説明を省略する。
(第2実施形態による電力変換装置の構成)
図1および図2に示すように、第2実施形態による電力変換装置200には、制御部203が設けられている。制御部203は、加減速パターン設定部231を含む。ここで、第2実施形態では、加減速パターン設定部231は、寿命取得部233により取得された電力用半導体素子13の寿命値(パワーサイクル寿命値PC1)に基づいて、加減速パターン51を加減速パターン51aに再設定するように構成されている。そして、加減速パターン設定部231は、再設定される加減速パターン51aに基づくパワーサイクル寿命値PC2が寿命取得部233により取得されたパワーサイクル寿命値PC1よりも大きくなるように、加減速パターン51を加減速パターン51aに再設定するように構成されている。
図1および図2に示すように、第2実施形態による電力変換装置200には、制御部203が設けられている。制御部203は、加減速パターン設定部231を含む。ここで、第2実施形態では、加減速パターン設定部231は、寿命取得部233により取得された電力用半導体素子13の寿命値(パワーサイクル寿命値PC1)に基づいて、加減速パターン51を加減速パターン51aに再設定するように構成されている。そして、加減速パターン設定部231は、再設定される加減速パターン51aに基づくパワーサイクル寿命値PC2が寿命取得部233により取得されたパワーサイクル寿命値PC1よりも大きくなるように、加減速パターン51を加減速パターン51aに再設定するように構成されている。
なお、第2実施形態の説明では、加減速パターン51を初期値の加減速パターンとし、加減速パターン51aを再設定された(再設定される)加減速パターンとして示している。また、パワーサイクル寿命値PC1を加減速パターン51に基づくパワーサイクル寿命値PCとして、パワーサイクル寿命値PC2を加減速パターン51aに基づくパワーサイクル寿命値PCとして示している。また、温度上昇値ΔT1を加減速パターン51に基づく温度上昇値ΔTとして、温度上昇値ΔT2を加減速パターン51aに基づく温度上昇値ΔTとして示している。
ここで、図3に示す加減速パターン51が設定された場合、温度取得部37は、図6に示す温度上昇値ΔT1を取得する。図6に示す例の場合では、加速期間TS2における温度上昇値ΔT1は8.5℃であり、減速期間TS4における温度上昇値ΔT1の6.2℃よりも大きくなる。
この場合、パワーサイクル取得部38は、8.5℃に対応するパワーサイクル寿命値PC1を、3.86×1012回として取得するとともに、6.2℃に対応するパワーサイクル寿命値PC1を、4.36×1013回として取得する。すなわち、温度上昇値ΔT1が約2℃大きいことにより、パワーサイクル寿命値PC1は、1桁大きくなることを示している。さらに、上記式(16)を用いることにより、この加減速パターン51の1サイクルのパワーサイクル寿命値PC1は、3.55×1012回となる。したがって、加減速パターン51のうちの最大の温度上昇値ΔT1となる温度上昇値ΔT1の大きさが、加減速パターン51(全体)の1サイクルのパワーサイクル寿命値PC1の大きさに最も影響を与える。
ここで、第2実施形態では、加減速パターン設定部231は、温度取得部37により取得された温度上昇値ΔT1よりも加速度パターン51aによる温度上昇値ΔT2が小さくなるように加減速パターン51を加減速パターン51aに再設定することにより、加減速パターン51aに基づくパワーサイクル寿命値PC2がパワーサイクル寿命値PC1よりも大きくするように構成されている。
具体的には、第2実施形態では、加減速パターン設定部231は、加減速パターン51の加速期間TS2または減速期間TS4のうちの少なくとも一方の速度変化率を変更する再設定を行うことによって、パワーサイクル寿命値PC2がパワーサイクル寿命値PC1よりも大きくなるように、加減速パターン51を加減速パターン51aに再設定するように構成されている。
たとえば、図3に示す加減速パターン51が初期値として(たとえば、操作者による操作部4の設定操作により)設定された場合、加減速パターン設定部231は、図10に示す加減速パターン51aに再設定するように構成されている。これにより、図4〜図6に示す波形は、図11〜図13にそれぞれ変化する。
ここで、温度上昇値ΔTの大きさは、速度変化率の大きさが大きい程大きく、速度変化率の大きさが小さい程小さくなる。したがって、加減速パターン設定部231は、温度上昇値ΔTを小さくするために、加速期間TS2を加速期間TS12(図10参照)のように速度変化率を小さくするように構成されている。そして、図3に示す加減速パターン51の例の場合、加速期間TS2を加速期間TS12(図10参照)のように速度変化率を小さくすることにより、温度上昇値ΔT1をΔT2に小さくすることが可能であるとともに、パワーサイクル寿命値PC1をPC2に小さくすることが可能になる。
そして、制御部203により負荷装置102の位置決め制御を行う場合には、加減速パターン設定部231は、温度上昇値ΔT1が比較的小さい減速期間TS4の速度変化率の大きさを大きくして(減速期間TS4を小さくして)加速期間TS2が延長された分を短縮する(減速期間TS14にする)ように構成されている。この場合、温度上昇値ΔT1が比較的小さい減速期間TS4の速度変化率の大きさを大きくしているので、パワーサイクル寿命値PC2(合計値)は、パワーサイクル寿命値PC1(合計値)よりも小さくなる。
具体的な数値を用いて示すと、図3および図10に示すように、加減速パターン設定部231は、到達速度ωを50[r/s]に維持した状態で、加速期間TS2(0.05s)から加速期間TS12(0.06s)に大きくする設定を行う。これにより、加速期間TS2における速度変化率50/0.05[r/s2]から速度変化率50/0.06[r/s2]に小さく変更される。一方、加減速パターン設定部231は、速度ωを50[r/s]から0[r/s]まで減速する減速期間TS4を0.05sから、0.0429sに短縮する設定を行う。これにより、減速期間TS4における速度変化率50/0.05[r/s2]から速度変化率50/0.0429[r/s2]に変更される。
これにより、図13に示すように、加減速パターン51による減速期間TS4における温度上昇値ΔT1の最大値が6.2℃である状態から、加減速パターン51aによる減速期間TS14における温度上昇値ΔT2の最大値が7.0℃に大きくなる一方、加減速パターン51による加速期間TS2における温度上昇値ΔT1の最大値が8.5℃である状態から、加減速パターン51aによる加速期間TS12における温度上昇値ΔT2の最大値が7.0℃に小さくなる。すなわち、第2実施形態では、加速度パターン設定部231は、加速期間TS12の温度上昇値ΔT2の最大値と減速期間TS14の温度上昇値ΔT2の最大値とを略等しくなるように、加減速パターン51aを設定(再設定)するように構成されている。
上記の加減速パターン51aの例の場合、上記の式(16)を用いて、取得されたパワーサイクル寿命値PC2は、8.55×1012回となり、3.55×1012回(パワーサイクル寿命値PC1)よりも2倍以上大きくなる。
また、第2実施形態では、加減速パターン設定部231は、取得されたパワーサイクル寿命値PC1(およびPC2)に基づいて、加減速パターン51を加減速パターン51aに再設定するように構成されており、再設定される加減速パターン51aに基づくパワーサイクル寿命値PC2が定期メンテナンス期間TMに略一致するように、加減速パターン51を加減速パターン51aに再設定するように構成されている。なお、定期メンテナンス期間TMは、特許請求の範囲の「所定の寿命値」の一例である。
具体的には、記憶部5には、予め定期メンテナンス期間TMの情報54が記憶されている。なお、電力変換装置200では、定期メンテナンス期間TMの長さは、たとえば、操作者の操作部4の設定操作等により変更可能に構成されている。そして、加減速パターン設定部231は、定期メンテナンス期間TMとパワーサイクル寿命値PC2とに基づいて、パワーサイクル寿命値PC2が定期メンテナンス期間TMに略一致するように、加減速パターン51aを設定するように構成されている。
(第2実施形態の電力変換装置の制御方法)
次に、図14を参照して、第2実施形態による電力変換装置200の制御方法について説明する。図14では、電力変換装置200の制御処理フローを示している。なお、図14に示す処理は、制御部203により実行される。なお、上記第1実施形態の制御処理と同一の処理については、同一の符号を付して説明を省略する。
次に、図14を参照して、第2実施形態による電力変換装置200の制御方法について説明する。図14では、電力変換装置200の制御処理フローを示している。なお、図14に示す処理は、制御部203により実行される。なお、上記第1実施形態の制御処理と同一の処理については、同一の符号を付して説明を省略する。
ここで、第2実施形態では、制御部203により、取得されたパワーサイクル寿命値PC1に基づいて、加減速パターン51が加減速パターン51aに再設定される。そして、再設定される加減速パターン51aに基づくパワーサイクル寿命値PC2が寿命取得部233により取得されたパワーサイクル寿命値PC1よりも大きくなるように、加減速パターン51が加減速パターン51aに再設定される。
まず、ステップS101において、加減速パターン設定部231により、加減速パターン51(51a)が設定(再設定)される。具体的には、初期値として加減速パターン51が設定される場合には、たとえば、操作部4により受け付けた操作者の設定操作に基づいて加減速パターン51が設定される。また、後述するステップS102の後に実行する場合には、加減速パターン51aの再設定が行われる。その後、ステップS2に進む。
ステップS2、S3、および、S5〜S8が実行された後、ステップS102に進む。
そして、ステップS102において、加減速パターン51aの設定が完了したか否かが判断される。たとえば、加速期間TS12の温度上昇値ΔT2と減速期間TS14の温度上昇値ΔT2とが略一致する場合に、加減速パターン51aの設定が完了したと判断される。また、別の例としては、パワーサイクル寿命値PC2と定期メンテナンス期間TMとが略一致する場合に、加減速パターン51aの設定が完了したと判断される。そして、加減速パターン51aの設定が完了していないと判断された場合には、ステップS101に戻り、加減速パターン51aの設定が完了したと判断された場合、第2実施形態による電力変換装置200の制御処理フローは終了する。
また、第2実施形態による電力変換装置200のその他の構成は、第1実施形態における電力変換装置100と同様である。
[第2実施形態の効果]
第2実施形態では、以下のような効果を得ることができる。
第2実施形態では、以下のような効果を得ることができる。
第2実施形態では、上記のように、加減速パターン設定部231を、取得されたパワーサイクル寿命値PC1に基づいて、加減速パターン51を加減速パターン51aに再設定するように構成するとともに、パワーサイクル寿命値PC2がパワーサイクル寿命値PC1よりも大きくなるように、加減速パターン51を加減速パターン51aに再設定するように構成する。これにより、自動的にパワーサイクル寿命値PC1をPC2により大きくすることができる。
また、第2実施形態では、上記のように、加減速パターン設定部231を、加減速パターン51の加速(加速期間TS2)または減速(減速期間TS4)のうちの少なくとも一方の速度変化率を変更する再設定を行うことによって、パワーサイクル寿命値PC2がパワーサイクル寿命値PC1よりも大きくなるように、加減速パターン51を加減速パターン51aに再設定するように構成する。ここで、加減速パターン51の加速または減速のうちの少なくとも一方の速度変化率を小さくする再設定を行うことにより、電力用半導体素子13の温度上昇値ΔT2を再設定前(ΔT1)よりも小さくすることができる。この点に着目して、第2実施形態では、上記のように構成することにより、加速期間TS12または減速期間TS14の温度上昇値ΔT2を小さくすることができるので、容易に電力用半導体素子13の寿命値(パワーサイクル寿命値PC2)を大きくすることができる。
また、第2実施形態では、上記のように、寿命取得部233に、加減速パターン51に基づいて、電力用半導体素子13の温度上昇値ΔT1を取得する温度取得部37を設けて、寿命取得部233を、温度取得部37により取得された温度上昇値ΔT1に基づいて、パワーサイクル寿命値PC1を取得するように構成する。また、加減速パターン設定部231を、温度取得部233により取得された温度上昇値ΔT1よりも再設定される加減速パターン51aによる温度上昇値ΔT2が小さくなるように加減速パターン51aを再設定することにより、再設定される加減速パターン51aに基づくパワーサイクル寿命値PC2がパワーサイクル寿命値PC1よりも大きくするように構成する。これにより、温度取得部37により取得された温度上昇値ΔT1よりも再設定される加減速パターン51aによる温度上昇値ΔT2を小さくなるので、温度上昇値ΔT2が小さくなる分、より確実に、再設定される加減速パターン51aに基づくパワーサイクル寿命値PC2をパワーサイクル寿命値PC1よりも大きくすることができる。
また、第2実施形態では、上記のように、加減速パターン設定部231を、再設定される加減速パターン51aに基づくパワーサイクル寿命値PC1が定期メンテナンス期間TMに略一致するように、加減速パターン51を加減速パターン51aに再設定するように構成する。これにより、電力用半導体素子13が定期メンテナンス期間TMとは異なる時期に破損する場合が生じるのを抑制することができる。その結果、定期メンテナンス以外の時期にメンテナンスを行う回数を減少させることができるので、メンテナンスの回数を削減することができる。
また、第2実施形態による電力変換装置200のその他の効果は、第1実施形態における電力変換装置100と同様である。
[第3実施形態]
次に、図15を参照して、第3実施形態による電力変換装置300aの構成について説明する。第3実施形態では、複数の電力変換装置300aのパワーサイクル寿命値PC2同士が略一致するように、加減速パターン51が加減速パターン51aに再設定される。なお、上記第1実施形態および上記第2実施形態と同一の構成については、同じ符号を付してその説明を省略する。
次に、図15を参照して、第3実施形態による電力変換装置300aの構成について説明する。第3実施形態では、複数の電力変換装置300aのパワーサイクル寿命値PC2同士が略一致するように、加減速パターン51が加減速パターン51aに再設定される。なお、上記第1実施形態および上記第2実施形態と同一の構成については、同じ符号を付してその説明を省略する。
(第3実施形態による電力変換装置の構成)
図15に示すように、第3実施形態による電力変換システム300には、電力変換装置300aが複数設けられている。また、電力変換システム300には、複数の電力変換装置300aを制御する制御装置300bが設けられている。なお、制御装置300bは、特許請求の範囲の「制御部」、「寿命取得部」および「加減速パターン設定部」の一例である。
図15に示すように、第3実施形態による電力変換システム300には、電力変換装置300aが複数設けられている。また、電力変換システム300には、複数の電力変換装置300aを制御する制御装置300bが設けられている。なお、制御装置300bは、特許請求の範囲の「制御部」、「寿命取得部」および「加減速パターン設定部」の一例である。
ここで、第3実施形態では、制御装置300bは、複数の電力変換装置300aのそれぞれの加減速パターン51に基づいて、複数の電力変換装置300aのそれぞれのパワーサイクル寿命値PC1を取得するように構成されている。そして、制御装置300bは、取得されたパワーサイクル寿命値PC1に基づいて、加減速パターン51を加減速パターン51aに再設定するように構成する。そして、制御装置300bは、再設定される複数の電力変換装置300aのそれぞれのパワーサイクル寿命値PC2同士が略一致するように、加減速パターン51aを再設定するように構成されている。
具体的には、制御装置300bは、パワーサイクル寿命値PC2同士が略一致するとともに、パワーサイクル寿命値PC2が定期メンテナンス期間TMに略一致するように、それぞれの加減速パターン51を、それぞれ加減速パターン51aに設定するように構成されている。
また、第3実施形態による電力変換装置300aのその他の構成は、第1実施形態における電力変換装置100と同様である。
[第3実施形態の効果]
第3実施形態では、以下のような効果を得ることができる。
第3実施形態では、以下のような効果を得ることができる。
第3実施形態では、上記のように、電力変換装置300aを、複数設ける。そして、制御装置300bを、複数の電力変換装置300aのそれぞれの加減速パターン51に基づいて、複数の電力変換装置300aのそれぞれのパワーサイクル寿命値PC1を取得するように構成する。また、制御装置300bを、再設定される複数の電力変換装置300aのそれぞれのパワーサイクル寿命値PC2同士が略一致するように、加減速パターン51aを再設定するように構成する。これにより、複数の電力変換装置300aのメンテナンス(交換)を同時に行う場合に、寿命値が小さい電力用半導体素子13を有する電力変換装置300aの交換に合わせて、寿命値が大きい電力用半導体素子13を有する電力変換装置300aの交換が行われることを抑制することができる。また、複数の電力変換装置300aをそれぞれ個別にメンテナンス(交換)することが可能な場合でも、複数のパワーサイクル寿命値PC2同士を略一致することができるので、1回のメンテナンスの際に互いに寿命値が略一致する複数の電力変換装置300aを同時に交換することができる。その結果、メンテナンス回数を削減することができる。
また、第3実施形態による電力変換装置300aのその他の効果は、第1実施形態における電力変換装置100と同様である。
[変形例]
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
たとえば、上記第1〜第3実施形態では、電力変換装置をインバータとして構成する例を示したが、本発明はこれに限られない。たとえば、電力変換装置をコンバータとして構成してもよい。
また、上記第1〜第3実施形態では、寿命取得部33(233)に、トルク取得部34と、電流電圧取得部35と、損失取得部36と、温度取得部37とを設ける例を示したが、本発明はこれに限られない。たとえば、加減速パターン51が比較的単純なパターンであれば、寿命取得部33を、テーブル等を用いて、加減速パターン51の情報(速度変化率等)から直接、パワーサイクル寿命値PCを取得するように構成してもよい。
また、上記第2実施形態では、加減速パターン設定部231を、加減速パターン51の加速期間TS2および減速期間TS4の両方の速度変化率を変更する再設定を行うように構成する例を示したが、本発明はこれに限られない。すなわち、加減速パターン設定部231を、加減速パターン51の加速期間TS2または減速期間TS4のいずれか一方の速度変化率を変更する再設定を行うように構成してもよい。たとえば、負荷装置102の位置Nを制御せずに、到達速度ωを制御する場合には、減速期間TS4の速度変化率は変更しないで、加速期間TS2の速度変化率を小さくすることにより、パワーサイクル寿命値PC2をPC1よりも大きくすることが可能である。
また、上記第2実施形態では、加減速パターン設定部231を、加減速パターン51の加速期間TS2の温度上昇値ΔT2と減速期間TS4の温度上昇値ΔT2と略一致させてパワーサイクル寿命値PC2をPC1よりも大きくするように加減速パターン51aを再設定する例を示したが、本発明はこれに限られない。たとえば、加速期間TS2の温度上昇値ΔT2と減速期間TS4の温度上昇値ΔT2と略一致させずに、パワーサイクル寿命値PC2をPC1よりも大きくするように加減速パターン51aを再設定してもよい。
また、上記第2実施形態および上記第3実施形態では、所定の寿命値の例として、定期メンテナンス期間TMとする例を示したが、本発明はこれに限られない。たとえば、所定の寿命値として、定期メンテナンス期間TM以外の操作者の所望の期間を設定してもよい。
また、上記第3実施形態では、複数の電力変換装置300aとは別個に制御装置300bを配置する例を示したが、本発明はこれに限られない。たとえば、複数の電力変換装置300aが互いに情報を通信することにより、電力変換装置300aの制御部が、第3実施形態による制御装置300bとしての機能を発揮するように構成してもよい。
3、203 制御部
11a〜11f スイッチング素子(電力用半導体素子)
12a〜12f ダイオード(電力用半導体素子)
13 電力用半導体素子
31、231 加減速パターン設定部
33、233 寿命取得部
34 トルク取得部
35 電流電圧取得部
36 損失取得部
37 温度取得部
38 パワーサイクル取得部(パワーサイクル寿命取得部)
51、51a 加減速パターン
100、200、300a 電力変換装置
102 負荷装置
300b 制御装置(制御部、寿命取得部、パワーサイクル寿命取得部)
11a〜11f スイッチング素子(電力用半導体素子)
12a〜12f ダイオード(電力用半導体素子)
13 電力用半導体素子
31、231 加減速パターン設定部
33、233 寿命取得部
34 トルク取得部
35 電流電圧取得部
36 損失取得部
37 温度取得部
38 パワーサイクル取得部(パワーサイクル寿命取得部)
51、51a 加減速パターン
100、200、300a 電力変換装置
102 負荷装置
300b 制御装置(制御部、寿命取得部、パワーサイクル寿命取得部)
Claims (8)
- 電力変換を行うとともに、電力変換された電力を負荷装置に供給する電力用半導体素子と、
前記電力用半導体素子の駆動を制御する制御部とを備え、
前記制御部は、前記負荷装置を駆動させる速度の加減速パターンを設定する加減速パターン設定部と、設定された前記加減速パターンに基づいて、前記電力用半導体素子の寿命値を取得する寿命取得部とを含む、電力変換装置。 - 前記寿命取得部は、前記加減速パターンに基づいて、前記負荷装置の加減速トルク値を取得するトルク取得部と、前記加減速トルク値に基づいて、前記負荷装置に供給される電力の出力電流値および出力電圧値を取得する電流電圧取得部と、前記出力電流値および前記出力電圧値に基づいて、前記電力用半導体素子の電力損失を取得する損失取得部と、前記電力用半導体素子の電力損失に基づいて、前記電力用半導体素子の温度上昇値を取得する温度取得部と、前記温度上昇値に基づいて、前記電力用半導体素子の寿命値としてのパワーサイクル寿命値を取得するパワーサイクル寿命取得部とを含む、請求項1に記載の電力変換装置。
- 前記加減速パターン設定部は、取得された前記電力用半導体素子の寿命値に基づいて、前記加減速パターンを再設定するように構成されており、再設定される前記加減速パターンに基づく前記電力用半導体素子の寿命値が前記寿命取得部により取得された前記電力用半導体素子の寿命値よりも大きくなるように、前記加減速パターンを再設定するように構成されている、請求項1または2に記載の電力変換装置。
- 前記加減速パターン設定部は、前記加減速パターンの加速または減速のうちの少なくとも一方の速度変化率を変更する再設定を行うことによって、再設定される前記加減速パターンに基づく前記電力用半導体素子の寿命値が前記寿命取得部により取得された前記電力用半導体素子の寿命値よりも大きくなるように、前記加減速パターンを再設定するように構成されている、請求項3に記載の電力変換装置。
- 前記寿命取得部は、前記加減速パターンに基づいて、前記電力用半導体素子の温度上昇値を取得する温度取得部を含むとともに、前記温度取得部により取得された前記温度上昇値に基づいて、前記電力用半導体素子の寿命値を取得するように構成されており、
前記加減速パターン設定部は、前記温度取得部により取得された前記温度上昇値よりも再設定される前記加減速パターンによる前記温度上昇値が小さくなるように前記加減速パターンを再設定することにより、再設定される前記加減速パターンに基づく前記電力用半導体素子の寿命値が前記寿命取得部により取得された前記電力用半導体素子の寿命値よりも大きくするように構成されている、請求項3または4に記載の電力変換装置。 - 前記加減速パターン設定部は、再設定される前記加減速パターンに基づく前記電力用半導体素子の寿命値が所定の寿命値に略一致するように、前記加減速パターンを再設定するように構成されている、請求項3〜5のいずれか1項に記載の電力変換装置。
- 前記電力変換装置は、複数設けられており、
前記寿命取得部は、前記複数の電力変換装置のそれぞれの前記加減速パターンに基づいて、前記複数の電力変換装置のそれぞれの前記電力用半導体素子の寿命値を取得するように構成されており、
前記加減速パターン設定部は、再設定される前記複数の電力変換装置のそれぞれの前記電力用半導体素子の寿命値同士が略一致するように、前記加減速パターンを再設定するように構成されている、請求項3〜6のいずれか1項に記載の電力変換装置。 - 電力変換された電力を負荷装置に供給する電力用半導体素子と、前記電力用半導体素子の駆動を制御する制御部とを備える電力変換装置の制御方法であって、
前記負荷装置を駆動させる速度の加減速パターンを設定し、
設定された前記加減速パターンに基づいて、前記電力用半導体素子の寿命値を取得する、電力変換装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016044993A JP2017163672A (ja) | 2016-03-08 | 2016-03-08 | 電力変換装置および電力変換装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016044993A JP2017163672A (ja) | 2016-03-08 | 2016-03-08 | 電力変換装置および電力変換装置の制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017163672A true JP2017163672A (ja) | 2017-09-14 |
Family
ID=59854233
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016044993A Pending JP2017163672A (ja) | 2016-03-08 | 2016-03-08 | 電力変換装置および電力変換装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017163672A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2013157274A1 (ja) * | 2012-04-19 | 2015-12-21 | パナソニックIpマネジメント株式会社 | 水素生成装置及び燃料電池システム |
-
2016
- 2016-03-08 JP JP2016044993A patent/JP2017163672A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2013157274A1 (ja) * | 2012-04-19 | 2015-12-21 | パナソニックIpマネジメント株式会社 | 水素生成装置及び燃料電池システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8519662B2 (en) | Method and apparatus for controlling motor torque | |
| KR102604003B1 (ko) | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 | |
| US8729846B2 (en) | Motor drive system and control method thereof | |
| US20080203960A1 (en) | Method and apparatus for estimating system inertia where number of motor rotations are restricted | |
| CN113364358B (zh) | 驱动装置、驱动系统以及电动机的驱动方法 | |
| JPWO2009122520A1 (ja) | モータ駆動制御装置 | |
| JP4037643B2 (ja) | モータ駆動装置及びモータ回転子位置検出方法 | |
| CN102362427B (zh) | 具有同一负载模式的装置的省电驱动装置以及方法 | |
| EP2879289B1 (en) | Apparatus and method for controlling inverter | |
| CN115398794A (zh) | 马达控制装置、马达系统及马达控制方法 | |
| JP2017163672A (ja) | 電力変換装置および電力変換装置の制御方法 | |
| JP6465236B1 (ja) | 制御装置、制御方法、制御システム、学習装置、及びモデルデータの生成方法 | |
| CN101085659A (zh) | 由感应电动机驱动的纱线馈送装置 | |
| CN103516282B (zh) | 异步电机开环矢量控制方法和装置 | |
| US7248489B2 (en) | Control of the mains bridge of a frequency converter | |
| JP6478257B2 (ja) | 高圧インバータ制御方法及びこれを含むシステム | |
| JP4127000B2 (ja) | モータ制御装置 | |
| ITMI20111180A1 (it) | Impianto eolico per la generazione di energia elettrica | |
| JP6574711B2 (ja) | 永久磁石同期電動機のインダクタンス測定方法 | |
| JP4312584B2 (ja) | 発電装置 | |
| JP2016092989A (ja) | モータ制御装置 | |
| JP2017103978A (ja) | モータ温度推定装置 | |
| EP1936796A1 (en) | Inverter device | |
| JP7024750B2 (ja) | 電力変換装置、洗濯機及び電力変換方法 | |
| KR101402894B1 (ko) | 역상 제동시 권선형 유도 전동기의 제어 장치 및 방법 |