JP2017163760A - モータ制御装置、モータ制御方法、情報処理プログラム、および記録媒体 - Google Patents
モータ制御装置、モータ制御方法、情報処理プログラム、および記録媒体 Download PDFInfo
- Publication number
- JP2017163760A JP2017163760A JP2016047565A JP2016047565A JP2017163760A JP 2017163760 A JP2017163760 A JP 2017163760A JP 2016047565 A JP2016047565 A JP 2016047565A JP 2016047565 A JP2016047565 A JP 2016047565A JP 2017163760 A JP2017163760 A JP 2017163760A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- information
- replacement
- control device
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0259—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterized by the response to fault detection
- G05B23/0286—Modifications to the monitored process, e.g. stopping operation or adapting control
- G05B23/0289—Reconfiguration to prevent failure, e.g. usually as a reaction to incipient failure detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/04—Program control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Program control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
- G05B19/0423—Input/output
- G05B19/0425—Safety, monitoring
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/406—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by monitoring or safety
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0259—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterized by the response to fault detection
- G05B23/0286—Modifications to the monitored process, e.g. stopping operation or adapting control
- G05B23/0291—Switching into safety or degraded mode, e.g. protection and supervision after failure
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B9/00—Safety arrangements
- G05B9/02—Safety arrangements electric
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details of starting control
- H02P1/022—Security devices, e.g. correct phase sequencing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/20—Pc systems
- G05B2219/24—Pc safety
- G05B2219/24024—Safety, surveillance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/20—Pc systems
- G05B2219/25—Pc structure of the system
- G05B2219/25104—Detect transfer of control module, use mean default values instead of normal
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/33—Director till display
- G05B2219/33105—Identification of type of connected module, motor, panel
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/34—Director, elements to supervisory
- G05B2219/34459—Plausibility check on connection of module, control unit to machine
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37494—Intelligent sensor, data handling incorporated in sensor
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/43—Speed, acceleration, deceleration control ADC
- G05B2219/43048—Step change in reference, soft start, smoothing reference
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Computer Security & Cryptography (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
【解決手段】モータ制御装置の制御部(2)は、モータ交換検出部(4)がモータ(M)の交換を検出した場合に、少なくとも、受付部(5)がユーザからの確認情報の入力を受け付けるまで、モータ(M)の動作を制限する制限処理を実行する。
【選択図】図1
Description
本発明の一実施形態について、図1〜図3に基づいて説明すれば、以下のとおりである。本実施の形態では、モータ制御装置として、例えば、バッテリレスアブソリュートエンコーダを搭載した回転式モータを制御対象として、該モータに接続された負荷機械の位置決め制御を行うモータ制御装置について説明する。なお、本実施の形態では、上記のモータ制御装置について説明するが、本発明のモータ制御装置は必ずしもこれに限らない。例えば、インクリメンタルエンコーダ若しくはバッテリ付きアブソリュートエンコーダが搭載されたモータの制御を行うモータ制御装置、またはリニアエンコーダが搭載されたリニアモータの制御を行うモータ制御装置に適用できる。また、負荷機械の速度制御やトルク制御を行うモータ制御装置にも適用できる。
図2は、モータ制御装置1Aを含む制御システム10の概要を示す図である。図2に示すように、制御システム10は、ツールPC20と、モータ制御装置1Aと、モータM及びエンコーダ31を備えるサーボモータ30と、サーボモータ30のモータMによって駆動される負荷機械32と、上位コントローラ40と、を含んでいる。
バッテリ付きアブソリュートエンコーダは、外部電源がOFFであっても、該エンコーダの外部に設けられ接続されたバッテリから供給される電力によってモータ位置情報を保持することができる。しかし、バッテリが取り外された場合、またはバッテリの電圧が低下した場合には、モータ位置情報を消失する。
本実施の形態のモータ制御装置1Aの構成について、図1に基づいて説明する。図1は、本実施の形態におけるモータ制御装置1Aおよびそれを含む制御システム10の概略的な構成を示すブロック図である。
前記制限処理は、制御部2への外部からの指令を無効にする処理、モータMへの駆動信号の出力を禁止する処理、又は、モータMへの駆動信号の出力値を抑える処理、のうち少なくとも1つを含む。制御部2への外部からの指令を無効にする処理は、ツールPC20や上位コントローラ40といった外部機器50からの指令を受け付ける受付部5が、これらの指令を無効とする処理である。また、モータMへの駆動信号の出力を禁止する処理は、モータ制御装置1Aの制御部2が演算したモータの駆動信号を、モータMに入力される過程で遮断する処理である。このとき、制御部2が演算したモータの駆動信号を遮断してもよいし、モータ制御装置1A内に設けられる出力回路(図示せず)が、モータの駆動信号に基づいて出力する出力電流を遮断してもよい。また、モータMへの駆動信号の出力値を抑える処理は、後述するように、モータMへの駆動信号の出力値を抑えることで、モータの速度、加速度を制限する処理である。
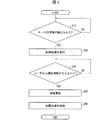
前記制限処理は、モータ交換検出部4がモータMの交換を検出した場合に実行される。本実施の形態では、モータ交換検出部4は、接続されているサーボモータ30のエンコーダ31から接続モータ識別情報を取得し、取得した接続モータ識別情報が、制御対象モータ識別情報と一致するか否かを照合して、一致しない場合に、モータMが交換されたことを検出する。
本実施の形態のモータ制御装置1Aでは、前記制限処理は、受付部5が、ユーザからのモータの交換を確認した旨の確認情報の入力を受け付けるまで継続される。該確認情報の入力について、以下に説明する。
モータ交換検出部4からのモータ交換検出信号は、報知部6にも送信される。報知部6は、該モータ交換検出信号を受信すると、モータが交換された旨の異常情報を報知する。本実施の形態では、該報知は、表示部60による表示によって行われる。該表示は、例えば、表示部60としてのランプの点灯であってもよいし、表示部60の画面に情報を表示することであってもよい。また、前記報知は、音による報知であってもよい。つまり、報知部6が異常情報を報知する方法は特に限定されない。
切替部7は、制御部2の前記制限処理の実行の有無を切り替えることができる。切替部7は、制御部2に接続されたモータMの用途が、インクリメント型である場合に、制御部2が前記制限処理を実行しないようにする。このモータMの用途についての情報であるモータ用途情報は、あらかじめユーザが外部機器50を用いて入力し、記憶部3に記憶されている。
図3は、本実施の形態のモータ制御装置1Aが実行する処理の流れを示すフローチャートである。このフローチャートでは、モータ制御装置1Aが通常のモータMの制御を行っている状態における、モータの交換に関する処理について説明する。
本発明の他の実施形態について、図4および図5に基づいて説明すれば、以下のとおりである。なお、本実施の形態において説明すること以外の構成は、前記実施の形態1と同じである。また、説明の便宜上、前記実施の形態1の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
図4に基づいて、本実施の形態のモータ制御装置1Bの構成について説明する。図4は、本実施の形態のモータ制御装置1Bおよびそれを含む制御システム11の概略的な構成を示すブロック図である。
図5は、本実施の形態のモータ制御装置1Bが実行する処理の流れを示すフローチャートである。このフローチャートでは、モータ制御装置1Bが通常のモータMの制御を行っている状態における、モータの交換に関する処理について説明する。
本発明のさらに他の実施形態について、図6に基づいて説明すれば、以下のとおりである。なお、本実施の形態において説明すること以外の構成は、前記実施の形態1および実施の形態2と同じである。また、説明の便宜上、前記実施の形態1および実施の形態2の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
本発明のさらに他の実施形態について、図7に基づいて説明すれば、以下のとおりである。なお、本実施の形態において説明すること以外の構成は、前記実施の形態1〜3と同じである。また、説明の便宜上、前記実施の形態1〜3の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
モータ制御装置1A〜1Dの制御ブロックは、集積回路(ICチップ)等に形成された論理回路(ハードウェア)によって実現してもよいし、CPU(Central Processing Unit)を用いてソフトウェアによって実現してもよい。
2 制御部
3 記憶部
4 モータ交換検出部
5 受付部
6 報知部
7 切替部
31 エンコーダ
40 上位コントローラ
M モータ
Claims (16)
- モータの制御を行うモータ制御装置であって、
前記モータの動作を制御する制御部と、
前記モータが交換されたことを検出するモータ交換検出部と、
ユーザから入力を受け付ける受付部と、を備え、
前記制御部は、前記モータ交換検出部がモータの交換を検出した場合に、少なくとも、前記モータの交換を確認した旨の確認情報の入力を前記受付部がユーザから受け付けるまで、前記モータの動作を制限する制限処理を実行することを特徴とするモータ制御装置。 - 前記制限処理が、前記制御部への外部からの指令を無効にする処理、前記モータへの駆動信号の出力を禁止する処理、又は、前記モータへの駆動信号の出力値を抑える処理、のうち少なくとも1つを含むことを特徴とする請求項1に記載のモータ制御装置。
- 前記制限処理が、外部からの複数の指令のうち特定の種類の指令を実行させないようにする処理を含むことを特徴とする請求項1又は2に記載のモータ制御装置。
- 前記制御部は、前記モータ交換検出部がモータの交換を検出した場合に、前記モータの交換を確認した旨の確認情報の入力を前記受付部がユーザから受け付け、かつ、前記モータの原点再設定処理が完了するまで、前記制限処理を実行することを特徴とする請求項1〜3のいずれか1項に記載のモータ制御装置。
- 前記モータ交換検出部は、制御対象としているモータに関する制御対象モータ情報を取得し、当該制御対象モータ情報に基づいて、前記モータが交換されたことを検出し、
前記受付部は、前記確認情報として、前記制御対象モータ情報の更新指示をユーザから受け付けることを特徴とする請求項1〜4のいずれか一項に記載のモータ制御装置。 - 前記制御対象モータ情報が、制御対象としているモータに固有の識別情報である制御対象モータ識別情報を含んでおり、
前記モータ交換検出部は、現在接続されているモータに固有の識別情報である接続モータ識別情報が、前記制御対象モータ識別情報と一致するか否かを照合して、一致しない場合に前記モータが交換されたことを検出するようになっていることを特徴とする請求項5に記載のモータ制御装置。 - 前記モータの状態を報知する報知部を備え、
前記報知部は、前記モータ交換検出部がモータの交換を検出した場合に、モータが交換された旨の異常情報を報知することを特徴とする請求項1〜6のいずれか一項に記載のモータ制御装置。 - 前記報知部は、前記モータの交換を確認した旨の確認情報の入力を前記受付部がユーザから受け付けた場合に、前記異常情報を解除し、前記異常情報の解除後、前記モータの原点位置が不明である場合に、その旨を示す警告情報を報知することを特徴とする請求項7に記載のモータ制御装置。
- 前記報知部は、前記モータの原点再設定処理が行われた場合に、前記警告情報を解除することを特徴とする請求項8に記載のモータ制御装置。
- 前記制御対象モータ情報が格納された記憶部を備え、
前記モータ交換検出部は、前記記憶部から前記制御対象モータ情報を取得することを特徴とする請求項5又は6に記載のモータ制御装置。 - 前記モータ交換検出部は、前記制御対象モータ情報を、前記モータ、又は前記モータに搭載されているエンコーダから取得することを特徴とする請求項5又は6に記載のモータ制御装置。
- 前記モータ交換検出部は、前記制御対象モータ情報を、前記モータ制御装置に接続された上位コントローラから取得することを特徴とする請求項5又は6に記載のモータ制御装置。
- 前記制御部の前記制限処理の実行の有無を切り替える切替部をさらに備え、
前記切替部は、制御対象となるモータの用途に関する用途情報を取得し、当該用途情報がインクリメント型の用途を示している場合には、前記制限処理を実行させないことを特徴とする請求項1〜12のいずれか一項に記載のモータ制御装置。 - モータの制御を行うモータ制御方法であって、
前記モータが交換されたことを検出するモータ交換検出ステップと、
前記モータ交換検出ステップにおいてモータの交換が検出された場合に、少なくとも、前記モータの交換を確認した旨の確認情報の入力をユーザから受け付けるまで、交換後のモータの動作を制限する動作制限ステップと、を含むことを特徴とするモータ制御方法。 - 請求項1〜13のいずれか一項に記載のモータ制御装置としてコンピュータを機能させるための情報処理プログラムであって、前記各部としてコンピュータを機能させるための情報処理プログラム。
- 請求項15に記載の情報処理プログラムを記録したコンピュータ読み取り可能な記録媒体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016047565A JP6443366B2 (ja) | 2016-03-10 | 2016-03-10 | モータ制御装置、モータ制御方法、情報処理プログラム、および記録媒体 |
| EP22161492.8A EP4057083B1 (en) | 2016-03-10 | 2016-12-16 | Motor control apparatus, motor control method, information processing program, and recording medium |
| EP16204795.5A EP3217233B1 (en) | 2016-03-10 | 2016-12-16 | Motor control apparatus, motor control method, information processing program, and recording medium |
| US15/382,730 US10416663B2 (en) | 2016-03-10 | 2016-12-18 | Motor control apparatus, motor control method, information processing program, and recording medium |
| CN201611190305.9A CN107181442B (zh) | 2016-03-10 | 2016-12-20 | 马达控制装置及方法以及计算机可读介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016047565A JP6443366B2 (ja) | 2016-03-10 | 2016-03-10 | モータ制御装置、モータ制御方法、情報処理プログラム、および記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017163760A true JP2017163760A (ja) | 2017-09-14 |
| JP6443366B2 JP6443366B2 (ja) | 2018-12-26 |
Family
ID=57821754
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016047565A Active JP6443366B2 (ja) | 2016-03-10 | 2016-03-10 | モータ制御装置、モータ制御方法、情報処理プログラム、および記録媒体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10416663B2 (ja) |
| EP (2) | EP3217233B1 (ja) |
| JP (1) | JP6443366B2 (ja) |
| CN (1) | CN107181442B (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021505113A (ja) * | 2017-12-18 | 2021-02-15 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー.Hewlett‐Packard Development Company, L.P. | 複数モーターについてのモーター識別 |
| JP2022137706A (ja) * | 2021-03-09 | 2022-09-22 | オムロン株式会社 | モータ制御装置、及び、モータ制御装置における通信環境の調整方法 |
| JP2022138348A (ja) * | 2021-03-10 | 2022-09-26 | オムロン株式会社 | サーボドライバ及びサーボシステム |
| JP2023134960A (ja) * | 2022-03-15 | 2023-09-28 | オムロン株式会社 | 制御システム |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7012222B2 (ja) * | 2016-09-14 | 2022-01-28 | パナソニックIpマネジメント株式会社 | モータ制御装置 |
| JP7087951B2 (ja) * | 2018-11-22 | 2022-06-21 | オムロン株式会社 | 制御システム、制御方法、ドライブ装置 |
| WO2022032587A1 (en) * | 2020-08-13 | 2022-02-17 | Siemens Aktiengesellschaft | Encoder, motor, motor drive and host computer |
| TWI885644B (zh) * | 2023-12-15 | 2025-06-01 | 國立中正大學 | 應用數位實境之工具機異警與輔助排除系統 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09311055A (ja) * | 1996-05-22 | 1997-12-02 | Sanyo Denki Co Ltd | アブソリュートエンコーダ |
| WO1999043882A1 (fr) * | 1998-02-27 | 1999-09-02 | Mitsubishi Denki Kabushiki Kaisha | Controleur de machine a coudre |
| JP2003102195A (ja) * | 2002-08-28 | 2003-04-04 | Yaskawa Electric Corp | モータ制御方法 |
| JP2003153570A (ja) * | 2001-11-09 | 2003-05-23 | Hanshin Electric Co Ltd | ファンモータ制御装置 |
| JP2009195087A (ja) * | 2008-02-18 | 2009-08-27 | Nsk Ltd | 回転角度位置検出装置 |
| JP2013226000A (ja) * | 2012-04-23 | 2013-10-31 | Toyota Motor Corp | 車両の制御装置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5239247A (en) * | 1992-06-17 | 1993-08-24 | Cincinnati Milacron | Reconfigurable master-slave control |
| DE10037968B4 (de) * | 2000-08-03 | 2007-02-08 | Siemens Ag | Elektrischer Antrieb mit Motoridentifizierung und Verfahren zur Motoridentifizierung |
| JP2002335699A (ja) * | 2001-05-09 | 2002-11-22 | Hitachi Ltd | 交流モータの制御装置 |
| US6829565B2 (en) * | 2003-02-14 | 2004-12-07 | Xerox Corporation | Stepper motor automated self-test routine |
| US7135830B2 (en) * | 2003-09-30 | 2006-11-14 | Reliance Electric Technologies, Llc | System and method for identifying operational parameters of a motor |
| US7184902B2 (en) * | 2003-09-30 | 2007-02-27 | Reliance Electric Technologies, Llc | Motor parameter estimation method and apparatus |
| WO2005034604A2 (en) * | 2003-10-03 | 2005-04-21 | Black & Decker, Inc. | Methods of discharge control for a battery pack of a cordless power tool system, a cordless power tool system and battery pack adapted to provide over-discharge protection and discharge control |
| US7847505B2 (en) * | 2004-02-25 | 2010-12-07 | Siemens Industry, Inc. | System and method for configuring a soft starter |
| US7707461B2 (en) * | 2007-01-31 | 2010-04-27 | Hewlett-Packard Development Company, L.P. | Digital media drive failure prediction system and method |
| DE102007026678A1 (de) * | 2007-06-08 | 2008-12-11 | Abb Ag | Verfahren zum Austausch eines defekten Feldgerätes gegen ein neues Feldgerät in einem über digitalen Feldbus kommunizierenden System, insbesondere Automatisierungssystem |
| DE102009007559B4 (de) * | 2009-02-04 | 2017-07-06 | Sew-Eurodrive Gmbh & Co Kg | Antriebssystem, Mehrfachantriebssystem, Verfahren zum Überprüfen eines Antriebssystems oder Mehrfachantriebssystems, Verfahren zur Inbetriebnahme einer Maschine, Maschine mit einem Antriebssystem oder Mehrfachantriebssystem, Computerprogramm und –produkt |
| JP5447260B2 (ja) * | 2010-02-11 | 2014-03-19 | 株式会社デンソー | 電池電圧監視装置 |
| JP5609817B2 (ja) * | 2011-08-11 | 2014-10-22 | オムロン株式会社 | 無線センサモジュール、それによる測定データの処理方法、プログラムおよび記録媒体 |
| SG2012072195A (en) * | 2012-09-27 | 2014-04-28 | Rockwell Automation Asia Pacific Business Ctr Pte Ltd | Modular motor drive system and method |
| SG2012072203A (en) * | 2012-09-27 | 2014-04-28 | Rockwell Automation Asia Pacific Business Ctr Pte Ltd | Motor drive configuration system and method |
| US8917045B2 (en) * | 2012-11-19 | 2014-12-23 | Nidec Motor Corporation | Methods and systems for selecting and programming replacement motors |
| KR20150060985A (ko) * | 2013-01-11 | 2015-06-03 | 미쓰비시덴키 가부시키가이샤 | 인코더, 서보 앰프, 컨트롤러, 및 서보 시스템에 있어서의 정보 교환 방법 |
| US10402881B2 (en) * | 2014-02-25 | 2019-09-03 | Regal Beloit America, Inc. | Methods and systems for identifying a replacement motor |
| US9491242B2 (en) * | 2014-04-11 | 2016-11-08 | Nidec Motor Corporation | Systems and methods for selecting and wirelessly programming a motor |
| US10832495B2 (en) * | 2014-04-18 | 2020-11-10 | Carefusion 303, Inc. | Remote maintenance of medical devices |
| JP6174649B2 (ja) * | 2015-09-30 | 2017-08-02 | ファナック株式会社 | ファンモータの予防保全機能を備えたモータ駆動装置 |
| US10448564B2 (en) * | 2016-03-30 | 2019-10-22 | Steering Solutions Ip Holding Corporation | Motor exchange system for a machine |
-
2016
- 2016-03-10 JP JP2016047565A patent/JP6443366B2/ja active Active
- 2016-12-16 EP EP16204795.5A patent/EP3217233B1/en active Active
- 2016-12-16 EP EP22161492.8A patent/EP4057083B1/en active Active
- 2016-12-18 US US15/382,730 patent/US10416663B2/en active Active
- 2016-12-20 CN CN201611190305.9A patent/CN107181442B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09311055A (ja) * | 1996-05-22 | 1997-12-02 | Sanyo Denki Co Ltd | アブソリュートエンコーダ |
| WO1999043882A1 (fr) * | 1998-02-27 | 1999-09-02 | Mitsubishi Denki Kabushiki Kaisha | Controleur de machine a coudre |
| US6119610A (en) * | 1998-02-27 | 2000-09-19 | Mitsubishi Denki Kabushiki Kaisha | Sewing machine controller |
| JP2003153570A (ja) * | 2001-11-09 | 2003-05-23 | Hanshin Electric Co Ltd | ファンモータ制御装置 |
| JP2003102195A (ja) * | 2002-08-28 | 2003-04-04 | Yaskawa Electric Corp | モータ制御方法 |
| JP2009195087A (ja) * | 2008-02-18 | 2009-08-27 | Nsk Ltd | 回転角度位置検出装置 |
| JP2013226000A (ja) * | 2012-04-23 | 2013-10-31 | Toyota Motor Corp | 車両の制御装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021505113A (ja) * | 2017-12-18 | 2021-02-15 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー.Hewlett‐Packard Development Company, L.P. | 複数モーターについてのモーター識別 |
| JP7015922B2 (ja) | 2017-12-18 | 2022-02-03 | ヒューレット-パッカード デベロップメント カンパニー エル.ピー. | 複数モーターについてのモーター識別 |
| JP2022137706A (ja) * | 2021-03-09 | 2022-09-22 | オムロン株式会社 | モータ制御装置、及び、モータ制御装置における通信環境の調整方法 |
| JP7581982B2 (ja) | 2021-03-09 | 2024-11-13 | オムロン株式会社 | モータ制御装置、及び、モータ制御装置における通信環境の調整方法 |
| JP2022138348A (ja) * | 2021-03-10 | 2022-09-26 | オムロン株式会社 | サーボドライバ及びサーボシステム |
| JP7651889B2 (ja) | 2021-03-10 | 2025-03-27 | オムロン株式会社 | サーボドライバ及びサーボシステム |
| JP2023134960A (ja) * | 2022-03-15 | 2023-09-28 | オムロン株式会社 | 制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4057083B1 (en) | 2025-03-26 |
| EP4057083A1 (en) | 2022-09-14 |
| CN107181442B (zh) | 2020-06-02 |
| CN107181442A (zh) | 2017-09-19 |
| EP3217233A3 (en) | 2017-12-27 |
| JP6443366B2 (ja) | 2018-12-26 |
| EP3217233B1 (en) | 2022-04-27 |
| EP3217233A2 (en) | 2017-09-13 |
| US20170261973A1 (en) | 2017-09-14 |
| US10416663B2 (en) | 2019-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6443366B2 (ja) | モータ制御装置、モータ制御方法、情報処理プログラム、および記録媒体 | |
| JP5348499B2 (ja) | I/oユニット並びに産業用コントローラ | |
| JP6259413B2 (ja) | ロボットまたは工作機械の制御装置、無線教示操作盤および自動機械システム | |
| JP6816553B2 (ja) | 制御システム | |
| JP4849261B2 (ja) | 安全アプリケーション作成支援装置 | |
| JP5901802B2 (ja) | エンコーダ、サーボアンプ、コントローラ、およびサーボシステムにおける情報交換方法 | |
| US11193987B2 (en) | Control system of industrial machine | |
| US20110202146A1 (en) | Method for triggering actions of a machine using secure input elements | |
| US11614727B2 (en) | Communication controller | |
| CN113924191B (zh) | 自动保护通过移动操作装置控制的机器人系统运行的方法和系统 | |
| CN109769408B (zh) | 电动机控制装置 | |
| WO2018122910A1 (ja) | エレベーターの修復支援システム | |
| CN116438490B (zh) | 控制装置 | |
| JP7504331B1 (ja) | 産業用コントロールシステム | |
| JP4415798B2 (ja) | パラメータ変更処理方法 | |
| JP7460663B2 (ja) | 制御システム | |
| JP6821559B2 (ja) | 自己修復機能を有するフィールド機器 | |
| US11586174B2 (en) | Controller, storage medium, and wireless communication device | |
| CN113557481B (zh) | 安全控制装置及安全控制系统 | |
| JP6553006B2 (ja) | エレベーター保守システム | |
| JP2005251016A (ja) | 制御システム、並びに、それを構成する表示器および制御装置 | |
| KR20150062846A (ko) | 모터 보호용 계전기 및 모터 보호용 계전기의 펌웨어 업데이트 방법 | |
| JP2013069101A (ja) | プログラマブル表示器およびそのデータ処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180904 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181022 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181030 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181112 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6443366 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |