JP2017164866A - 面合わせ機能を備えたロボットハンド及びロボット - Google Patents
面合わせ機能を備えたロボットハンド及びロボット Download PDFInfo
- Publication number
- JP2017164866A JP2017164866A JP2016054152A JP2016054152A JP2017164866A JP 2017164866 A JP2017164866 A JP 2017164866A JP 2016054152 A JP2016054152 A JP 2016054152A JP 2016054152 A JP2016054152 A JP 2016054152A JP 2017164866 A JP2017164866 A JP 2017164866A
- Authority
- JP
- Japan
- Prior art keywords
- holder
- hand
- robot
- base
- posture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007935 neutral effect Effects 0.000 claims abstract description 6
- 210000000707 wrist Anatomy 0.000 abstract description 4
- 238000000034 method Methods 0.000 description 3
- 210000000078 claw Anatomy 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0258—Two-dimensional joints
- B25J17/0275—Universal joints, e.g. Hooke, Cardan, ball joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0608—Gripping heads and other end effectors with vacuum or magnetic holding means with magnetic holding means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0208—Compliance devices
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/27—Arm part
- Y10S901/28—Joint
- Y10S901/29—Wrist
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/30—End effector
- Y10S901/40—Vacuum or mangetic
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
【課題】ワークの被吸着面に対して、該被吸着面の姿勢に応じて電磁石を適切に面合わせできる機構を備えたロボットハンド、及び該ロボットハンドを備えたロボットの提供。
【解決手段】ロボットハンド10は、手首軸14に接続されたハンドベース24と、ハンドベース24に取付けられたホルダ26と、ホルダ26の内部に、ハンド中心軸線上にその回転中心が位置するように設けられた球面軸受28と、球面軸受28を介してホルダ26に対して姿勢変更自在に取付けられるとともに、ホルダ26に関してハンドベース24とは反対側にホルダ26から突き出た突出部30を有する連結部材32と、電磁石20の吸着面22とは反対側の取付け面34に固着されるホルダベース36と、連結部材32の突出部30の中心軸線がハンド中心軸線と一致する中立姿勢にホルダベース36の姿勢を復元させる姿勢復元部材38とを備える。
【選択図】図2
【解決手段】ロボットハンド10は、手首軸14に接続されたハンドベース24と、ハンドベース24に取付けられたホルダ26と、ホルダ26の内部に、ハンド中心軸線上にその回転中心が位置するように設けられた球面軸受28と、球面軸受28を介してホルダ26に対して姿勢変更自在に取付けられるとともに、ホルダ26に関してハンドベース24とは反対側にホルダ26から突き出た突出部30を有する連結部材32と、電磁石20の吸着面22とは反対側の取付け面34に固着されるホルダベース36と、連結部材32の突出部30の中心軸線がハンド中心軸線と一致する中立姿勢にホルダベース36の姿勢を復元させる姿勢復元部材38とを備える。
【選択図】図2
Description
本発明は、電磁石の吸着面を用いてワークを保持するロボットハンド、及び該ロボットハンドを備えたロボットに関する。
ロボットを用いて搬送対象物(ワーク)を搬送する場合、該ロボットハンドとして、開閉式の爪(指)を有するもの、真空パッドを有するもの、電磁石を有するもの等が知られている。これに関連する従来技術として、例えば特許文献1には、連結部材の一端部にバキュームチャックが固着装備され、該連結部材が球面軸受けを介してホルダ部材に保持され、該ホルダ部材がホルダアームに装着されて成るロボットハンドが記載されている。
また特許文献2には、ジョイントボックスに対して上下動する支持板及び支持ロッドと、支持板及び支持ロッドに対して設けられ、支持ロッドの先端部を支点として揺動し、かつワークを保持するワーク保持プレート及び電磁石と、支持板とワーク保持プレートとの間に設けられ、ワーク保持プレートがワークを保持した後、ワークが水平状態になるようにその姿勢補正を行うベローズとを備えたロボットハンドが記載されている。
ロボットハンドが真空吸着式のものである場合は、一般に高価な真空発生装置が必要となり、ロボットを含むシステム全体としてコストアップにつながる。また保持したワークの姿勢補正を行うためにエアアクチュエータや電動アクチュエータ等のアクチュエータを使用する場合も、コストアップにつながる。
そこで本発明は、アクチュエータや真空発生装置等の高価な装置を使用せずに、ワークの被吸着面に対して、該被吸着面の姿勢(傾き)に応じて電磁石を適切に面合わせできる機構を備えたロボットハンド、及び該ロボットハンドを備えたロボットを提供することを目的とする。
上記目的を達成するために、本願第1の発明は、ワークの被吸着面に電磁石の吸着面を合わせて吸着することによって前記ワークを保持するロボットハンドであって、ハンドベースと、前記ハンドベースに取付けられたホルダと、前記ホルダの内部に、ハンド中心軸線上にその回転中心が位置するように設けられた球面軸受を介して前記ホルダに対して姿勢変更自在に取付けられるとともに、前記ホルダに関して前記ハンドベースとは反対側に前記ホルダから突き出た突出部を有する連結部材と、前記電磁石の前記吸着面とは反対側の取付け部位に固着されるホルダベースと、を備え、前記連結部材が前記ホルダベースを介して前記電磁石と一体となるように、前記連結部材の前記突出部が前記ホルダベースに取付けられており、前記ホルダベースに、前記連結部材の前記突出部の中心軸線が前記ハンド中心軸線と一致する中立姿勢に前記ホルダベースを復元させる姿勢復元部材が設けられている、ロボットハンドを提供する。
第2の発明は、第1の発明において、前記姿勢復元部材は板ばねを備える、ロボットハンドを提供する。
第3の発明は、第2の発明において、前記姿勢復元部材は、互いに異なる8つの方向に復元力が作用するように構成された複数の板ばねを備える、ロボットハンドを提供する。
第4の発明は、第1〜第3のいずれか1つの発明に係るロボットハンドを備えたロボットを提供する。
本発明によれば、吸着面の傾きにバラツキがある場合でも、ハンドの吸着面をワークの被吸着面に容易に合わせることができる。また姿勢復元部材として板ばねを使用することにより、エアアクチュエータや電動アクチュエータ等を使用せずに、ワークの吸着・保持が行える。さらに、互いに異なる8方向に復元力が作用するように複数の板ばねを設けることにより、ハンドのコンプライアンスをさらに高めることができる。
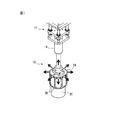
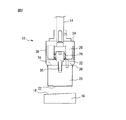
図1は、本願発明の好適な実施形態に係るロボットハンド10の斜視図であり、図2はロボットハンド10の中心軸線に沿った側断面図である。図1に示すロボットハンド10は、多関節ロボット等のロボット(アーム)12の先端に、回転可能な手首軸14を介して取付けられ、磁力によって吸着可能な金属等からなる対象物(ワーク)16の被吸着面18に、電磁石20の吸着面22を合わせて吸着することにより、ワーク16を保持・搬送するように構成されている。
より詳細には、ロボットハンド10は、手首軸14に接続されたハンドベース24と、ハンドベース24に取付けられたホルダ26と、ホルダ26の内部に、ハンド中心軸線上にその回転中心が位置するように設けられた球面軸受28と、球面軸受28を介してホルダ26に対して姿勢変更自在に取付けられるとともに、ホルダ26に関してハンドベース24とは反対側にホルダ26から突き出た突出部30を有する連結部材32と、電磁石20の吸着面22とは反対側の取付け部位(取付け面)34に固着されるホルダベース36とを備える。
連結部材32は、ホルダベース36を介して電磁石20と一体となるように、連結部材32の突出部30がホルダベース36に取付けられている。図2の例では、連結部材32の突出部30はホルダベース36を貫通し、電磁石20の取付け部位34の略中央にねじ込み式に結合されている。
またロボットハンド10のホルダベース36には、連結部材32の突出部30の中心軸線がハンド中心軸線と一致する中立姿勢に連結部材32(ホルダベース36)の姿勢を復元させる姿勢復元部材38が設けられている。姿勢復元部材38としては、エアアクチュエータや電動アクチュエータのようなアクチュエータを使用せずに復元力を生じさせるものが好ましく、例えば板ばねが好適である。
また板ばね38は、互いに異なる複数の方向に復元力が作用するように、複数個設けられることが好ましい。図示例では、電磁石20の吸着面22に平行(ハンド中心軸線に垂直)な面内において、ハンド中心軸線から放射状に(例えば45°の等間隔で)延びる8つの方向に復元力が作用するように、8つの板ばね38がホルダ26及びホルダベース36の外側面上に(例えば45°の等角度間隔で)取り付けられている。なお板ばねを複数使用する場合、その個数は8つに限られず、例えば3つ、4つ又は6つでもよいが、その場合もホルダベース36の外側面上に等角度間隔(120°、90°又は60°)で設けられることが好ましい。
次に、ロボットハンド10を用いてワーク16のハンドリング手順の一例を、図3のフローチャートを参照しつつ説明する。先ず、ロボットハンド10をワーク16に接近(図2の例では下方に移動)させ(ステップS1)、ハンド10(電磁石20の吸着面22)とワーク16の被吸着面18とを合わせる操作(面合わせ)を行う(ステップS2)。
ここで、電磁石20は、球面軸受28によってホルダ26(ハンドベース24)に対して姿勢変更可能な連結部材32と一体的に構成されているので、電磁石20の吸着面22がワーク16の被吸着面18に対して平行でない状態でロボットハンド10をワーク16に接近させても、電磁石20はワーク16に当接することによって自動的に姿勢変更し、好適な面合わせが行われる。
次に電磁石20の磁力によって、ワーク16を電磁石20に吸着させる(ステップS3)。その後、ハンド10を(図2の例では上方に)移動させると、板ばね38の復元力によって、吸着時に変化したホルダ26に対する電磁石20(連結部材32)の姿勢が、突出部30の中心軸線がハンド中心軸線と一致する中立姿勢に復元する(ステップS4)。
その後、ワーク16はロボットハンド10によって所定の搬送先に搬送される(ステップS5)。従ってワーク搬送時は、ロボットハンド10に対するワーク16の姿勢は常に一定とすることができるので、搬送先でのワークの扱い(次工程へのワークの受け渡し等)が容易に行える。
ハンド10によって吸着・保持されるべきワークが複数の場合、それらのワークは、所定位置に1つずつ配置(例えば整列配置)されていてもよいし、コンテナ等にバラ積み配置されていてもよい。特に、バラ積み配置の場合は、各ワークにアプローチする際のハンドの姿勢を厳密に制御せずとも好適な面合わせが自動的に行われ、またワークを吸着してコンテナ等から離隔した後はハンドの姿勢が中立位置に自動的に復元するので、本実施形態に係るロボットハンドは極めて有利である。
10 ロボットハンド
12 ロボットアーム
14 手首軸
16 ワーク
18 被吸着面
20 電磁石
22 吸着面
24 ハンドベース
26 ホルダ
28 球面軸受
30 突出部
32 連結部材
34 取付け面
36 ホルダベース
38 姿勢復元部材
12 ロボットアーム
14 手首軸
16 ワーク
18 被吸着面
20 電磁石
22 吸着面
24 ハンドベース
26 ホルダ
28 球面軸受
30 突出部
32 連結部材
34 取付け面
36 ホルダベース
38 姿勢復元部材
Claims (4)
- ワークの被吸着面に電磁石の吸着面を合わせて吸着することによって前記ワークを保持するロボットハンドであって、
ハンドベースと、
前記ハンドベースに取付けられたホルダと、
前記ホルダの内部に、ハンド中心軸線上にその回転中心が位置するように設けられた球面軸受を介して前記ホルダに対して姿勢変更自在に取付けられるとともに、前記ホルダに関して前記ハンドベースとは反対側に前記ホルダから突き出た突出部を有する連結部材と、
前記電磁石の前記吸着面とは反対側の取付け部位に固着されるホルダベースと、を備え、
前記連結部材が前記ホルダベースを介して前記電磁石と一体となるように、前記連結部材の前記突出部が前記ホルダベースに取付けられており、
前記ホルダベースに、前記連結部材の前記突出部の中心軸線が前記ハンド中心軸線と一致する中立姿勢に前記ホルダベースを復元させる姿勢復元部材が設けられている、ロボットハンド。 - 前記姿勢復元部材は板ばねを備える、請求項1に記載のロボットハンド。
- 前記姿勢復元部材は、互いに異なる8つの方向に復元力が作用するように構成された複数の板ばねを備える、請求項2に記載のロボットハンド。
- 請求項1〜3のいずれか1項に記載のロボットハンドを備えたロボット。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016054152A JP2017164866A (ja) | 2016-03-17 | 2016-03-17 | 面合わせ機能を備えたロボットハンド及びロボット |
| CN201710067197.4A CN107199575A (zh) | 2016-03-17 | 2017-02-06 | 机械手和机器人 |
| DE102017105120.1A DE102017105120A1 (de) | 2016-03-17 | 2017-03-10 | Roboter und Roboterhand mit Flächenanpassungsfunktion |
| US15/460,989 US20170266818A1 (en) | 2016-03-17 | 2017-03-16 | Robot and robot hand having surface matching function |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016054152A JP2017164866A (ja) | 2016-03-17 | 2016-03-17 | 面合わせ機能を備えたロボットハンド及びロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017164866A true JP2017164866A (ja) | 2017-09-21 |
Family
ID=59751662
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016054152A Pending JP2017164866A (ja) | 2016-03-17 | 2016-03-17 | 面合わせ機能を備えたロボットハンド及びロボット |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20170266818A1 (ja) |
| JP (1) | JP2017164866A (ja) |
| CN (1) | CN107199575A (ja) |
| DE (1) | DE102017105120A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH709307A1 (de) * | 2014-02-26 | 2015-08-28 | Tecan Trading Ag | Transportwerkzeug zum Transportieren eines Laborartikels. |
| US20210380353A1 (en) * | 2020-06-09 | 2021-12-09 | Dishcraft Robotics, Inc. | Apparatus and method for destacking objects |
| JP2023136072A (ja) * | 2022-03-16 | 2023-09-29 | Smc株式会社 | ワーク吸着装置 |
| DE102022135066B4 (de) * | 2022-12-30 | 2025-09-04 | Schunk Gmbh & Co. Kg Spann- Und Greiftechnik | Magnetgreifer, System mit Magnetgreifern, Verfahren zum Greifen von Werkstücken mit Höhenversatz |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5893492U (ja) * | 1981-12-18 | 1983-06-24 | 日本電気株式会社 | 物品移送機構 |
| JPS59173591U (ja) * | 1983-05-09 | 1984-11-20 | 豊田工機株式会社 | 素材保持装置 |
| JPH0435887A (ja) * | 1990-05-29 | 1992-02-06 | Suzuki Motor Corp | ワーク吸着装置 |
| JPH0639775A (ja) * | 1992-07-24 | 1994-02-15 | Canon Inc | コンプライアンス機構 |
| JPH06155353A (ja) * | 1992-11-10 | 1994-06-03 | Asake Seiko Kk | 部材の取出し供給装置 |
| JPH06190771A (ja) * | 1992-12-24 | 1994-07-12 | Toyota Motor Corp | ロボットハンド |
| JP2002087343A (ja) * | 2000-09-14 | 2002-03-27 | Toyota Industries Corp | 自動車の開閉体の開放装置および開放方法 |
| JP2002127070A (ja) * | 2000-10-18 | 2002-05-08 | Hiroshi Akashi | 板状体保持装置 |
| JP2002160187A (ja) * | 2000-11-24 | 2002-06-04 | Seiko Epson Corp | 保持装置、搬送装置、ic検査装置、保持方法、搬送方法及びic検査方法 |
| JP2004079308A (ja) * | 2002-08-15 | 2004-03-11 | Ohira Giken Kogyo Kk | コントローラ |
| JP2010058213A (ja) * | 2008-09-03 | 2010-03-18 | Central Motor Co Ltd | バキュームパッド装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10156779A (ja) | 1996-11-29 | 1998-06-16 | Nec Corp | ロボットハンド |
-
2016
- 2016-03-17 JP JP2016054152A patent/JP2017164866A/ja active Pending
-
2017
- 2017-02-06 CN CN201710067197.4A patent/CN107199575A/zh active Pending
- 2017-03-10 DE DE102017105120.1A patent/DE102017105120A1/de not_active Withdrawn
- 2017-03-16 US US15/460,989 patent/US20170266818A1/en not_active Abandoned
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5893492U (ja) * | 1981-12-18 | 1983-06-24 | 日本電気株式会社 | 物品移送機構 |
| JPS59173591U (ja) * | 1983-05-09 | 1984-11-20 | 豊田工機株式会社 | 素材保持装置 |
| JPH0435887A (ja) * | 1990-05-29 | 1992-02-06 | Suzuki Motor Corp | ワーク吸着装置 |
| JPH0639775A (ja) * | 1992-07-24 | 1994-02-15 | Canon Inc | コンプライアンス機構 |
| JPH06155353A (ja) * | 1992-11-10 | 1994-06-03 | Asake Seiko Kk | 部材の取出し供給装置 |
| JPH06190771A (ja) * | 1992-12-24 | 1994-07-12 | Toyota Motor Corp | ロボットハンド |
| JP2002087343A (ja) * | 2000-09-14 | 2002-03-27 | Toyota Industries Corp | 自動車の開閉体の開放装置および開放方法 |
| JP2002127070A (ja) * | 2000-10-18 | 2002-05-08 | Hiroshi Akashi | 板状体保持装置 |
| JP2002160187A (ja) * | 2000-11-24 | 2002-06-04 | Seiko Epson Corp | 保持装置、搬送装置、ic検査装置、保持方法、搬送方法及びic検査方法 |
| JP2004079308A (ja) * | 2002-08-15 | 2004-03-11 | Ohira Giken Kogyo Kk | コントローラ |
| JP2010058213A (ja) * | 2008-09-03 | 2010-03-18 | Central Motor Co Ltd | バキュームパッド装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170266818A1 (en) | 2017-09-21 |
| DE102017105120A1 (de) | 2017-09-21 |
| CN107199575A (zh) | 2017-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5549655B2 (ja) | ハンドおよびロボット | |
| JP2017164866A (ja) | 面合わせ機能を備えたロボットハンド及びロボット | |
| CN101375386A (zh) | 搬送装置和搬送方法 | |
| CN106457576B (zh) | 末端执行器、工业用机器人及其运转方法 | |
| JP2018510790A5 (ja) | ||
| JP2010240749A (ja) | ワーク倣い機能付きロボットハンド | |
| JP6367158B2 (ja) | 吸着装置、把持装置および搬送方法 | |
| TW201621499A (zh) | 自動機系統,用於自動機系統之自動機教導方法及自動機教導裝置 | |
| JP2010188465A (ja) | ロボットハンド | |
| CN108622655A (zh) | 板握持装置及板握持方法 | |
| TW201138003A (en) | Edge grip end effector | |
| TW201522193A (zh) | 翻面系統及其所採用之工作臺 | |
| CN108293324B (zh) | 部件实装机器人系统 | |
| CN102441790A (zh) | 部件组装装置及部件组装方法 | |
| US11043909B2 (en) | Piezoelectric driving device, electronic-component conveying apparatus, and robot | |
| JP2013013944A (ja) | 板状部材の支持装置および支持方法、ならびに板状部材の搬送装置 | |
| JP6330437B2 (ja) | ローダ装置、板材搬送方法、及び板材加工システム | |
| JP2015085435A (ja) | 作業装置 | |
| JP5439663B2 (ja) | 電磁アクチュエータ及び関節装置 | |
| JP3042092B2 (ja) | 対象物取扱装置 | |
| JP2011029241A (ja) | 基板搬送装置および基板貼り合わせ装置 | |
| JP2013013945A (ja) | 板状部材の支持装置および支持方法、ならびに板状部材の搬送装置 | |
| KR102722143B1 (ko) | 그리퍼의 탈착 및 회전 장치 | |
| WO2014115244A1 (ja) | ロボットシステム | |
| JPH04322993A (ja) | 対象物取扱装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180123 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180814 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190226 |