JP2017165513A - ピッキングシステム - Google Patents
ピッキングシステム Download PDFInfo
- Publication number
- JP2017165513A JP2017165513A JP2016050232A JP2016050232A JP2017165513A JP 2017165513 A JP2017165513 A JP 2017165513A JP 2016050232 A JP2016050232 A JP 2016050232A JP 2016050232 A JP2016050232 A JP 2016050232A JP 2017165513 A JP2017165513 A JP 2017165513A
- Authority
- JP
- Japan
- Prior art keywords
- shelf
- container
- picking
- moving
- article
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Warehouses Or Storage Devices (AREA)
Abstract
Description
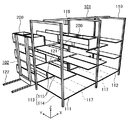
101 棚
102 搬送装置
103 移動装置
104 ピッキングロボット
105 容器保持手段
110 フレーム
111 第一棚
112 第二棚
113 棚板(保持部材)
114 底棚板
115 上棚板
116 移動空間
117 物品供給部
119 撮像装置
121 移載装置
122 レール
131 移動体
137 スライド部材
138 梁部材
139 柱部材
200 受領容器
210 供給容器
Claims (5)
- 受領容器に物品を投入するピッキングシステムであって、
複数の受領容器を保持する棚と、
前記棚に受領容器を移載する移載装置を有する搬送装置と、
移動体を前記棚に対して移動させる移動装置と、
前記移動体に取り付けられ、物品を前記棚に保持された受領容器に投入するピッキングロボットと
を備えるピッキングシステム。 - 前記棚は、前記受領容器に供給する物品が収容された供給容器を保持する物品供給部を備える
請求項1に記載のピッキングシステム。 - 前記移動装置は、
前記移動体に取り付けられ、前記受領容器に供給する物品が収容された供給容器を保持する容器保持手段を備える
請求項1に記載のピッキングシステム。 - 前記移動装置は、前記棚を挟んで前記搬送装置の反対側に配置される
請求項1〜3のいずれか一項に記載のピッキングシステム。 - 前記棚は、第一棚と第二棚とを備え、
前記移動体を前記第一棚と前記第二棚との間で移動させることで、前記ピッキングロボットは、前記第一棚に保持される受領容器、および、前記第二棚に保持される受領容器に物品を供給可能である
請求項1〜4のいずれか一項に記載のピッキングシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016050232A JP6705227B2 (ja) | 2016-03-14 | 2016-03-14 | ピッキングシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016050232A JP6705227B2 (ja) | 2016-03-14 | 2016-03-14 | ピッキングシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017165513A true JP2017165513A (ja) | 2017-09-21 |
| JP6705227B2 JP6705227B2 (ja) | 2020-06-03 |
Family
ID=59912638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016050232A Expired - Fee Related JP6705227B2 (ja) | 2016-03-14 | 2016-03-14 | ピッキングシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6705227B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019225234A1 (ja) * | 2018-05-23 | 2019-11-28 | 株式会社ダイフク | ピッキングシステム(picking system) |
| WO2020080825A1 (ko) * | 2018-10-18 | 2020-04-23 | 주식회사 가치소프트 | 서랍식 픽업 장치 및 이를 이용한 물품 입고 및 출고방법 |
| CN112478552A (zh) * | 2019-02-25 | 2021-03-12 | 牧今科技 | 保管系统 |
| JP2024084790A (ja) * | 2018-06-12 | 2024-06-25 | アウトストア・テクノロジー・エーエス | ロボットオペレーターを使用して保管コンテナからアイテムを収集するシステムおよび適用可能な方法 |
| WO2025138405A1 (zh) * | 2023-12-28 | 2025-07-03 | 北京京东乾石科技有限公司 | 仓储物流系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06329211A (ja) * | 1993-05-21 | 1994-11-29 | Mitsubishi Electric Corp | 荷積み装置 |
| JPH06329208A (ja) * | 1993-05-20 | 1994-11-29 | Kokusai Electric Co Ltd | 半導体製造装置のウェーハ搬送装置 |
| JPH08268512A (ja) * | 1995-04-03 | 1996-10-15 | Daifuku Co Ltd | 基板仕分け装置を備えた荷保管設備 |
| JPH1159817A (ja) * | 1997-08-27 | 1999-03-02 | Takeshi Saigo | 立体自動倉庫システム |
| JP2010052878A (ja) * | 2008-08-27 | 2010-03-11 | Murata Machinery Ltd | ピッキングシステム |
-
2016
- 2016-03-14 JP JP2016050232A patent/JP6705227B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06329208A (ja) * | 1993-05-20 | 1994-11-29 | Kokusai Electric Co Ltd | 半導体製造装置のウェーハ搬送装置 |
| JPH06329211A (ja) * | 1993-05-21 | 1994-11-29 | Mitsubishi Electric Corp | 荷積み装置 |
| JPH08268512A (ja) * | 1995-04-03 | 1996-10-15 | Daifuku Co Ltd | 基板仕分け装置を備えた荷保管設備 |
| JPH1159817A (ja) * | 1997-08-27 | 1999-03-02 | Takeshi Saigo | 立体自動倉庫システム |
| JP2010052878A (ja) * | 2008-08-27 | 2010-03-11 | Murata Machinery Ltd | ピッキングシステム |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114701792A (zh) * | 2018-05-23 | 2022-07-05 | 株式会社大福 | 拣选系统 |
| TWI807019B (zh) * | 2018-05-23 | 2023-07-01 | 日商大福股份有限公司 | 揀貨系統 |
| KR102732476B1 (ko) * | 2018-05-23 | 2024-11-19 | 가부시키가이샤 다이후쿠 | 피킹 시스템 |
| CN114701792B (zh) * | 2018-05-23 | 2024-03-01 | 株式会社大福 | 拣选系统 |
| JPWO2019225234A1 (ja) * | 2018-05-23 | 2020-12-10 | 株式会社ダイフク | ピッキングシステム(picking system) |
| CN112074470A (zh) * | 2018-05-23 | 2020-12-11 | 株式会社大福 | 拣选系统 |
| KR20210011915A (ko) * | 2018-05-23 | 2021-02-02 | 가부시키가이샤 다이후쿠 | 피킹 시스템 |
| US11807458B2 (en) | 2018-05-23 | 2023-11-07 | Daifuku Co., Ltd. | Picking system |
| JP2021121569A (ja) * | 2018-05-23 | 2021-08-26 | 株式会社ダイフク | ピッキングシステム(picking system) |
| WO2019225234A1 (ja) * | 2018-05-23 | 2019-11-28 | 株式会社ダイフク | ピッキングシステム(picking system) |
| JP7140236B2 (ja) | 2018-05-23 | 2022-09-21 | 株式会社ダイフク | ピッキングシステム(picking system) |
| CN112074470B (zh) * | 2018-05-23 | 2022-07-15 | 株式会社大福 | 拣选系统 |
| JP2024084790A (ja) * | 2018-06-12 | 2024-06-25 | アウトストア・テクノロジー・エーエス | ロボットオペレーターを使用して保管コンテナからアイテムを収集するシステムおよび適用可能な方法 |
| JP7689224B2 (ja) | 2018-06-12 | 2025-06-05 | アウトストア・テクノロジー・エーエス | ロボットオペレーターを使用して保管コンテナからアイテムを収集するシステムおよび適用可能な方法 |
| WO2020080825A1 (ko) * | 2018-10-18 | 2020-04-23 | 주식회사 가치소프트 | 서랍식 픽업 장치 및 이를 이용한 물품 입고 및 출고방법 |
| KR102148391B1 (ko) * | 2018-10-18 | 2020-08-27 | 주식회사 가치소프트 | 서랍식 픽업 장치 및 이를 이용한 물품 입고 및 출고방법 |
| KR20200043791A (ko) * | 2018-10-18 | 2020-04-28 | 주식회사 가치소프트 | 서랍식 픽업 장치 및 이를 이용한 물품 입고 및 출고방법 |
| CN112478552B (zh) * | 2019-02-25 | 2022-02-25 | 牧今科技 | 保管系统 |
| CN112478552A (zh) * | 2019-02-25 | 2021-03-12 | 牧今科技 | 保管系统 |
| WO2025138405A1 (zh) * | 2023-12-28 | 2025-07-03 | 北京京东乾石科技有限公司 | 仓储物流系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6705227B2 (ja) | 2020-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6315097B2 (ja) | ピッキングシステムとピッキング方法 | |
| JP5930406B2 (ja) | ピッキング設備 | |
| JP2017165513A (ja) | ピッキングシステム | |
| JP2018087053A (ja) | マルチタスククレーン | |
| CA2944671C (en) | A multi-storey goods storage arrangement | |
| JP7298589B2 (ja) | 物品収容設備 | |
| JP2015040120A (ja) | 配列決定方法及び積付設備 | |
| JP5516745B2 (ja) | 仕分システムと仕分方法 | |
| WO2021215132A1 (ja) | 自動倉庫システム | |
| JPWO2021215132A5 (ja) | ||
| JP7314924B2 (ja) | 物品収容設備 | |
| JP2018154479A (ja) | 立体自動倉庫 | |
| JP6694126B2 (ja) | 立体自動倉庫 | |
| JP2018080028A (ja) | 自動倉庫 | |
| JP6001969B2 (ja) | 自動倉庫 | |
| JP2011246223A (ja) | 自動倉庫 | |
| JPH09240809A (ja) | 物品保管設備 | |
| JP5811838B2 (ja) | 物品収納設備 | |
| JP6476868B2 (ja) | ピッキングシステム | |
| JP2013079141A (ja) | ピッキングシステム | |
| JP2005272053A (ja) | 物品収納設備 | |
| JP2019127347A (ja) | ケース移載システム及びケース移載方法 | |
| JP5660393B2 (ja) | 物品保管設備及び物品保管設備における物品積付け方法 | |
| WO2012101718A1 (ja) | 自動倉庫システム、搬出方法 | |
| JP7167390B2 (ja) | 立体自動倉庫 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200414 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200427 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6705227 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |