JP2017168085A - 情報処理装置、情報処理方法、及びプログラム - Google Patents
情報処理装置、情報処理方法、及びプログラム Download PDFInfo
- Publication number
- JP2017168085A JP2017168085A JP2017001010A JP2017001010A JP2017168085A JP 2017168085 A JP2017168085 A JP 2017168085A JP 2017001010 A JP2017001010 A JP 2017001010A JP 2017001010 A JP2017001010 A JP 2017001010A JP 2017168085 A JP2017168085 A JP 2017168085A
- Authority
- JP
- Japan
- Prior art keywords
- pattern
- information processing
- processing apparatus
- image
- luminance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Processing Or Creating Images (AREA)
Abstract
Description
以下の説明では、利用者に対して、現実世界とコンピュータグラフィック(CG)による仮想世界とをリアルタイムに融合させる複合現実感(MR)や拡張現実感(AR)を提供する例を挙げる。MR等は、例えば、組み立て作業時に作業手順や配線の様子を重畳表示する組み立て支援、患者の体表面に体内の様子を重畳表示する手術支援等、様々な分野への適用が可能である。利用者に対してMRを提供する装置としては、頭部搭載型のビデオシースルー型ヘッドマウンテッドディスプレイ(HMD)や、背面にビデオカメラを有するタブレット端末のような携帯型情報端末が用いられる。本実施形態では、ビデオシースルー型HMDを例に挙げる。ビデオシースルー型HMDの図示は省略する。本実施形態の情報処理システムは、ビデオシースルー型HMDと、後述する本実施形態の情報処理装置1000とを有して構成される。
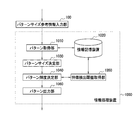
図1は、第1の実施形態の指標パターンを生成する情報処理装置1000の概略構成を示す図である。情報処理装置1000は、パターン取得部1010、情報記憶装置1020、パターンサイズ決定部1030、パターン輝度決定部1040、特徴検出閾値取得部1050、パターン出力部1060を有して構成されている。パターン取得部1010〜パターン出力部1060は、本実施形態における決定手段及び生成手段の一例である。パターンサイズ参考情報入力部100は、情報処理装置1000に接続される装置であってもよいし、情報処理装置1000に含まれていてもよい。
Dmax=√(Z2+Y2+X2) ・・・式(1)
S=L/(2×F) ・・・式(2)
Sα=S×Dmin ・・・式(3)
Sα=S×Dmax ・・・式(4)
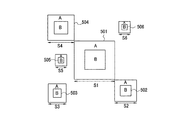
第1の実施形態では、最短距離と最長距離に基づく一組のパターンサイズSαの指標パターンを生成する例を挙げたが、例えば図5に示すような各サイズS1〜S6に対応した複数の指標パターン501〜506からなるパターンの集合が生成されてもよい。図5に示すような複数の指標パターン501〜506の集合の場合、指標パターン毎にパターンサイズS1〜S6を決定してもよい。これら各指標パターンのパターンサイズS1〜S6は、前述した最短距離と最長距離、カメラの画角や解像度等に基づく適切なパターンサイズSαの範囲内に入るサイズとして決定される。
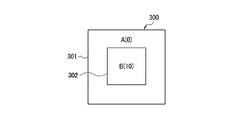
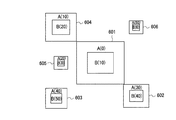
また、第1の実施形態では一組の指標パターンに対して輝度を決定したが、前述した輝度の決定条件を満たすのであれば、例えば図6に示すように複数の輝度による指標パターン601〜606からなるパターンの集合として生成されてもよい。なお、図6は、図5で説明した複数のサイズの複数の指標パターンについて、それぞれ輝度を決定した例を示している。図6の例では、指標パターン601はA領域の輝度が0でB領域の輝度が10、指標パターン602はA領域の輝度が30でB領域の輝度が40、指標パターン603はA領域の輝度が40でB領域の輝度が50となっている。さらに、指標パターン604はA領域の輝度が10でB領域の輝度が20、指標パターン605はA領域の輝度が20でB領域の輝度が30、指標パターン606はA領域の輝度が50でB領域の輝度が60となっている。図6の例においても、前述同様に、指標パターンは、現実空間の体験領域の撮影画像から自然特徴として検出可能であると共に利用者が視認し難いパターンとなる。
第1の実施形態では、パターンサイズ参考情報と特徴検出閾値とに基づいて指標パターンの輝度を決定していたが、パターンが付与される体験領域(例えば、現実の壁や床など)の輝度を考慮して指標パターンの輝度を決定してもよい。
第2の実施形態では、HMDのカメラのような入力機器(撮像装置)と、パターン出力部1060の印刷装置等のような出力機器とにおける入出力機器間の輝度ずれを考慮することにより、利用者等にとって、より視認し難い指標パターンを生成する例を挙げる。以下の説明では、前述した第1の実施形態の構成等とは異なる部分についてのみ説明する。
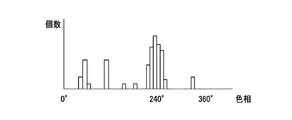
第2の実施形態では、パターン色決定部1055は色相のヒストグラムを用いて、体験領域画像の主となる色相を決定していたが、体験領域画像の主となる色相の決定方法は前述の例に限るものではない。例えば、体験領域画像を色相により領域分割し、一番大きな領域の色相を、体験領域画像の主となる色相に決定してもよい。
前述した第1の実施形態の図1や第2の実施形態の図7の各部は、ハードウェア構成又はソフトウェア構成の何れでも実現可能である。例えば、コンピュータのCPUに、前述した第1又は第2の実施形態のフローチャートの処理に係る情報処理プログラムを実行させてもよい。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (20)
- 画像の特徴を検出する際の閾値に基づいて、現実空間の体験領域に指標として付与されるパターンの輝度を決定する決定手段と、
前記決定された輝度の前記パターンの画像を生成する生成手段と、
を有することを特徴とする情報処理装置。 - 前記決定手段は、前記画像の輝度による特徴を検出する際の輝度の閾値に基づいて、前記パターンの輝度を決定することを特徴とする請求項1に記載の情報処理装置。
- 前記決定手段は、前記画像の輝度勾配による特徴を検出する際の輝度差の閾値に基づいて、前記パターンの模様の輝度差を決定し、
前記生成手段は、前記決定した輝度差を有する模様の前記パターンの画像を生成することを特徴とする請求項2に記載の情報処理装置。 - 前記決定手段は、前記パターンが付与される現実空間の体験領域の輝度を基に、前記パターンの輝度を決定することを特徴とする請求項1に記載の情報処理装置。
- 前記決定手段は、前記現実空間の体験領域の中で前記パターンが付与される位置の周囲の領域の輝度の平均値を基に、前記パターンの輝度を決定することを特徴とする請求項4に記載の情報処理装置。
- 前記決定手段は、前記パターンが付与される現実空間の体験領域の輝度と、前記現実空間の体験領域の撮影画像から前記パターンを検出するフィルタのパラメータとを基に、前記パターンの輝度を決定することを特徴とする請求項4又は5に記載の情報処理装置。
- 前記決定手段は、前記現実空間の撮影画像と前記輝度とに基づいて、前記パターンの色を決定し、
前記生成手段は、前記決定された色の前記パターンの画像を生成することを特徴とする請求項1乃至6の何れか1項に記載の情報処理装置。 - 前記決定手段は、前記撮影画像の各画素の色相のヒストグラムから前記撮影画像の主となる色相を求め、前記主となる色相と前記輝度とに基づいて前記パターンの色を決定することを特徴とする請求項7に記載の情報処理装置。
- 前記決定手段は、前記撮影画像の各画素の色相により前記撮影画像を色相ごとの領域に分割し、前記分割された領域の大きさを基に、前記撮影画像の主となる色相を求め、前記主となる色相と前記輝度とに基づいて前記パターンの色を決定することを特徴とする請求項7に記載の情報処理装置。
- 前記決定手段は、前記分割された領域の中で最も大きい領域の色相を、前記撮影画像の主となる色相とすることを特徴とする請求項9に記載の情報処理装置。
- 前記決定手段は、前記現実空間を撮影した複数の体験領域画像から前記主となる色相を求め、前記色相と前記輝度とに基づいて前記パターンの色を決定することを特徴とする請求項8乃至10の何れか1項に記載の情報処理装置。
- 前記決定手段は、前記現実空間の体験領域と前記現実空間を撮影する撮像装置との間の最短距離と最長距離とを基に、前記パターンのサイズを決定することを特徴とする請求項1乃至11の何れか1項に記載の情報処理装置。
- 前記決定手段は、更に前記撮像装置の画角と解像度とに基づいて、前記パターンのサイズを決定することを特徴とする請求項12に記載の情報処理装置。
- 前記決定手段は、前記閾値に基づいて前記決定した輝度を補正パラメータにより補正し、
前記生成手段は、前記補正された後の輝度の前記パターンの画像を生成することを特徴とする請求項1乃至13の何れか1項に記載の情報処理装置。 - 前記決定手段は、複数のパターンについて、パターンごとに前記サイズを決定し、
前記生成手段は、前記パターンごとにサイズが決定された前記複数のパターンが集合した画像を生成することを特徴とする請求項12乃至14の何れか1項に記載の情報処理装置。 - 前記決定手段は、前記複数のパターンについて、パターンごとに前記輝度を決定することを特徴とする請求項15に記載の情報処理装置。
- 前記現実空間の体験領域に付与される前記パターンは、前記現実空間を撮影する撮像装置の位置と姿勢を決める際の指標となされることを特徴とする請求項1乃至16の何れか1項に記載の情報処理装置。
- 現実空間の体験領域に付与するパターンの画像を生成する情報処理装置が実行する情報処理方法であって、
画像の特徴を検出する際の閾値に基づいて、現実空間の体験領域に指標として付与されるパターンの輝度を決定し、
前記決定された輝度のパターンの画像を生成する
ことを特徴とする情報処理方法。 - コンピュータを、請求項1乃至17の何れか1項に記載の情報処理装置の各手段として機能させるためのプログラム。
- 請求項1乃至17の何れか1項に記載の情報処理装置と、
撮像手段により現実空間を撮像した画像と、コンピュータグラフィックにより生成した仮想世界の画像とを、融合させた複合現実感の画像を表示手段に表示させる表示装置と、
を有することを特徴とする情報処理システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/455,291 US10685490B2 (en) | 2016-03-10 | 2017-03-10 | Information processing apparatus, information processing method, and storage medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016047233 | 2016-03-10 | ||
| JP2016047233 | 2016-03-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017168085A true JP2017168085A (ja) | 2017-09-21 |
| JP6938158B2 JP6938158B2 (ja) | 2021-09-22 |
Family
ID=59913795
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017001010A Expired - Fee Related JP6938158B2 (ja) | 2016-03-10 | 2017-01-06 | 情報処理装置、情報処理方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6938158B2 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63213077A (ja) * | 1987-02-28 | 1988-09-05 | Nippon Telegr & Teleph Corp <Ntt> | 画像合成方法 |
| JP2005135355A (ja) * | 2003-03-28 | 2005-05-26 | Olympus Corp | データオーサリング処理装置 |
| JP2009020614A (ja) * | 2007-07-10 | 2009-01-29 | Ritsumeikan | 複合現実感システムに用いるマーカユニット、複合現実感システム、マーカユニット作成支援システム、及び、マーカユニット作成支援プログラム |
| JP2015118442A (ja) * | 2013-12-17 | 2015-06-25 | ソニー株式会社 | 情報処理装置、情報処理方法およびプログラム |
| WO2016021181A1 (en) * | 2014-08-04 | 2016-02-11 | Canon Kabushiki Kaisha | Information processing apparatus and information processing method |
-
2017
- 2017-01-06 JP JP2017001010A patent/JP6938158B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63213077A (ja) * | 1987-02-28 | 1988-09-05 | Nippon Telegr & Teleph Corp <Ntt> | 画像合成方法 |
| JP2005135355A (ja) * | 2003-03-28 | 2005-05-26 | Olympus Corp | データオーサリング処理装置 |
| JP2009020614A (ja) * | 2007-07-10 | 2009-01-29 | Ritsumeikan | 複合現実感システムに用いるマーカユニット、複合現実感システム、マーカユニット作成支援システム、及び、マーカユニット作成支援プログラム |
| JP2015118442A (ja) * | 2013-12-17 | 2015-06-25 | ソニー株式会社 | 情報処理装置、情報処理方法およびプログラム |
| WO2016021181A1 (en) * | 2014-08-04 | 2016-02-11 | Canon Kabushiki Kaisha | Information processing apparatus and information processing method |
Non-Patent Citations (1)
| Title |
|---|
| 吉田 友祐、天目 隆平、柴田 史久、木村 朝子、田村 秀行: "美観と頑健性を両立させた複合現実感用半人為的幾何位置合わせマーカの研究(第1報)", 電子情報通信学会技術研究報告, vol. 106, no. 470, JPN6021002096, 12 January 2007 (2007-01-12), JP, pages 7 - 12, ISSN: 0004563640 * |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6938158B2 (ja) | 2021-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102049245B1 (ko) | 화상처리 장치, 화상처리 방법, 화상처리 시스템 및 기억매체 | |
| US12148100B2 (en) | Information processing apparatus, information processing method, and storage medium for generating a virtual viewpoint image | |
| US10685490B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| CN109313346B (zh) | 双目视图和单目视图之间的转换 | |
| KR102539427B1 (ko) | 화상 처리장치, 화상 처리방법, 및 기억매체 | |
| US8860847B2 (en) | Computer-readable storage medium having stored thereon image generation program, capturing apparatus, capturing system, and image generation method for creating an image | |
| JP5771981B2 (ja) | 描画画像共有装置、データ処理方法、プログラムおよび記録媒体 | |
| JP2017096725A (ja) | 情報処理装置、情報処理方法 | |
| US9679415B2 (en) | Image synthesis method and image synthesis apparatus | |
| US20120069018A1 (en) | Ar process apparatus, ar process method and storage medium | |
| JP2008033531A (ja) | 情報処理方法 | |
| JP2022059013A (ja) | 情報処理装置、認識支援方法およびコンピュータプログラム | |
| US20120105444A1 (en) | Display processing apparatus, display processing method, and display processing program | |
| JP7027049B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| WO2019163558A1 (ja) | 画像処理装置および画像処理方法、並びにプログラム | |
| CN102164292A (zh) | 记录装置和方法、图像处理装置和图像处理方法与程序 | |
| JPWO2013105381A1 (ja) | 画像処理方法、画像処理装置および画像処理プログラム | |
| CN105791793A (zh) | 图像处理方法及其电子装置 | |
| JP2017092756A (ja) | 画像処理装置、画像処理方法、画像投影システムおよびプログラム | |
| JP5448739B2 (ja) | 画像再生装置、撮像装置、画像再生方法 | |
| CN118967838B (zh) | 扩展现实设备的虚拟显示标定方法、装置和扩展现实设备 | |
| JP6938158B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP7391502B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP7779910B2 (ja) | 画像記録装置 | |
| JP2020187529A (ja) | 画像処理装置、画像処理システム、制御方法、および、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210803 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210901 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6938158 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |