JP2017169761A - 布押え装置と布押え装置を備えたミシン - Google Patents
布押え装置と布押え装置を備えたミシン Download PDFInfo
- Publication number
- JP2017169761A JP2017169761A JP2016058327A JP2016058327A JP2017169761A JP 2017169761 A JP2017169761 A JP 2017169761A JP 2016058327 A JP2016058327 A JP 2016058327A JP 2016058327 A JP2016058327 A JP 2016058327A JP 2017169761 A JP2017169761 A JP 2017169761A
- Authority
- JP
- Japan
- Prior art keywords
- cloth
- plate
- presser
- cpu
- moves
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






























Classifications
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B29/00—Pressers; Presser feet
- D05B29/02—Presser-control devices
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B21/00—Sewing machines with devices for automatically controlling movement of work-carrier relative to stitch-forming mechanism in order to obtain particular configuration of seam, e.g. program-controlled for sewing collars or for attaching pockets
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Sewing Machines And Sewing (AREA)
Abstract
【課題】布を送り板に載置し易い布押え装置と布押え装置を備えたミシンを提供する。
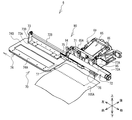
【解決手段】水平動機構6は、押え腕65、連結部材、押え板74、送り板支持機構90、エアシリンダ72を備える。押え腕65は前端部である先端部65Aを有する、連結部材は先端部65Aに上下動可能に連結する。押え板74、送り板支持機構90、エアシリンダ72は、連結部材にて支持する。送り板支持機構90は、押え板74を左右方向に移動可能に支持する。エアシリンダ72は送り板支持機構90に連結する。エアシリンダ72が駆動すると、押え板74は左右方向に移動する。
【選択図】図30
【解決手段】水平動機構6は、押え腕65、連結部材、押え板74、送り板支持機構90、エアシリンダ72を備える。押え腕65は前端部である先端部65Aを有する、連結部材は先端部65Aに上下動可能に連結する。押え板74、送り板支持機構90、エアシリンダ72は、連結部材にて支持する。送り板支持機構90は、押え板74を左右方向に移動可能に支持する。エアシリンダ72は送り板支持機構90に連結する。エアシリンダ72が駆動すると、押え板74は左右方向に移動する。
【選択図】図30
Description
本発明は布押え装置と布押え装置を備えたミシンに関する。
ミシンが有する布押え装置は布を前後方向と左右方向に移動する。例えば、特許文献1に開示のミシンの布押え装置は、送り板、押え腕、布押え板、X方向駆動機構、Y方向駆動機構、エアシリンダを備える。送り板は布を支持する。押え腕は、X方向移動機構、Y方向駆動機構によって、左右方向、前後方向に移動する。布押え板は枠状であり、押え腕の先端部に上下動可能に設ける。エアシリンダは押え腕の左右両側に夫々設ける。エアシリンダが駆動することで、布押え板は、押圧位置と待機位置の間を上下動する。押圧位置にある布押え板は、送り板との間で布を押える。待機位置にある布押えは、送り板から上方に離隔する。布押え板が待機位置にある時、布は送り板に載置可能となる。布を送り板に載置した後、布押え板が待機位置から押圧位置に移動すると、布押え装置は送り板と布押え板の間で布を押える。ミシンは布押え装置が押える布を縫製する。
上記布押え装置では、布押え板が押圧位置と待機位置の間を上下動する可動範囲は限定的である。作業者は、待機位置にある布押え板と送り板の間の位置に布を配置して、布を送り板に載置する。待機位置にある布押え板は送り板の上方にあるので、作業者が布を送り板に載置しにくい可能性がある。
本発明の目的は、布を送り板に載置し易い布押え装置と布押え装置を備えたミシンを提供することである。
本発明の請求項1に係る布押え装置は、水平方向と平行な第一方向と、前記水平方向と平行且つ前記第一方向と直交する第二方向に移動可能であり、布を載置する送り板と、前記送り板に連結し、前記送り板の連結部分から前記第一方向の一方側へ延び、前記一方側の端部であって前記送り板よりも上側に先端部を有する押え腕と、前記押え腕の前記先端部に上下方向に移動可能に連結する連結部材と、前記連結部材にて支持し且つ前記送り板と平行であり、前記連結部材の上下動に伴い前記送り板との間で前記布を押える押圧位置と、前記押圧位置よりも上側で前記送り板から離隔する離隔位置の間を移動する布押え板とを備えた布押え装置において、前記連結部材にて支持し、平面視で前記布押え板が前記押え腕の前記先端部と前記第一方向に並ぶ作動位置と、前記作動位置から前記布押え板が前記押え腕の前記先端部に対し前記第二方向にずれる退避位置の間で、前記布押え板を前記第二方向に移動可能に支持する送り板支持機構と、前記連結部材にて支持し、前記送り板支持機構を介して前記布押え板を前記作動位置と前記退避位置の間で移動する第一駆動部とを備えたことを特徴とする。布押え板が第一駆動部によって作動位置から退避位置に移動した時、退避位置にある布押え板は、作動位置から送り板に対して第二方向にずれる。故に布押え板は送り板の上方に無い状態になる。故に布押え装置は布を送り板に載置し易くできる。
請求項2に係る布押え装置は、前記第一駆動部は、前記第二方向に延びるロッドを有し、前記ロッドを前記第二方向に進退するエアシリンダであり、前記送り板支持機構は、前記連結部材に固定し、前記エアシリンダを支持する固定部材と、前記固定部材に対して前記第二方向に移動可能に前記ロッドに連結し、前記布押え板を支持する可動部材とを備えたことを特徴とする。エアシリンダがロッドを第二方向に進退することで、布押え板は作動位置と退避位置の間を移動する。故に布押え装置は、布押え板の第二方向の移動を安定化できる。
請求項3に係る布押え装置は、前記可動部材に設け、前記第二方向に沿う締結穴と、前記第二方向に延び、一端部を前記締結穴に差し込む軸部と、前記軸部の他端部に設ける頭部とを有する締結部材と、前記固定部材に設け、前記締結部材の前記頭部が接触する接触部とを備え、前記布押え板が前記退避位置にある時、前記締結部材の前記頭部が前記接触部から離隔し、前記布押え板が前記作動位置にある時、前記締結部材の前記頭部が前記接触部に接触することを特徴とする。作業者は、締結穴に対する締結部材の軸部の配置位置を第二方向に調節することで、締結部材の頭部の配置位置を第二方向に調節できる。故に布押え装置は、布押え板の作動位置を第二方向に調節できる。
請求項4に係る布押え装置は、前記固定部材と前記可動部材の何れか一方に固定し、前記第二方向に延びるレール部材と、前記固定部材と前記可動部材の何れか他方に固定し、前記レール部材に対して前記第二方向に相対移動可能に連結する移動部とを備えたことを特徴とする。レール部材が連結部に対して第二方向に相対移動することで、布押え板は作動位置と退避位置の間を移動する。故に布押え装置は、レール部材が連結部に対して移動する構造により布押え板の第二方向の移動を安定化できる。
請求項5に係る布押え装置は、前記エアシリンダは、前記ロッドを前記第二方向に進退可能に支持する筒部を備え、前記固定部材は、前記ロッドが前記筒部から前記第二方向の一方に進出する形態と、前記ロッドが前記筒部から前記第二方向の他方に進出する形態との何れかで前記エアシリンダを支持し、前記布押え板が前記退避位置にある時、前記ロッドが前記筒部から前記第二方向の一方又は他方に進出し、前記布押え板が前記作動位置にある時、前記ロッドが前記筒部に退入することを特徴とする。作業者は、エアシリンダの形態を、ロッドが筒部から一方に進出する形態と、ロッドが筒部から他方に進出する形態との何れか一方に切り替えることができる。故に布押え装置は、布押え板が退避位置に移動する時の移動方向を切替可能となる。故に布押え装置は、布押え板の退避位置を多様化できる。
請求項6に係る布押え装置は、前記押え腕に設け、前記連結部材を上下動することで、前記布押え板を前記押圧位置と前記離隔位置の間で移動する第二駆動部と、前記第一駆動部と前記第二駆動部を駆動制御する制御部とを備え、前記制御部は、前記第二駆動部が前記離隔位置に移動した前記布押え板を、前記作動位置から前記退避位置に移動するよう前記第一駆動部を駆動制御する第一駆動制御部と、前記第一駆動制御部が前記退避位置に移動した前記布押え板を、前記作動位置に移動するよう前記第一駆動部を駆動制御する第二駆動制御部と、前記第二駆動制御部が前記作動位置に移動した前記布押え板を、前記離隔位置から前記押圧位置に移動するよう前記第二駆動部を駆動制御する第三駆動制御部とを備えたことを特徴とする。布押え装置は、離隔位置にある布押え板を、作動位置と離隔位置の間で移動するので、布押え板の第二方向の移動を安定化できる。第三駆動制御部は、退避位置から作動位置に移動した布押え板を、押圧位置に移動する。よって、布押え装置は、送り板に載置した布を、布押え板で迅速に押えることができる。
請求項7に係るミシンは、上記布押え装置を備えたことを特徴とする。ミシンは上記布押え装置と同様の効果を奏する。
図面を参照し本発明の一実施形態を説明する。搬送システム300の概略的構成を説明する。以下説明は、図中に矢印で示す左右、前後、上下を使用する。
図1に示すように、搬送システム300は、二台のミシン1A、1Bと、二台の搬送装置100A、100Bと、一台のパーソナルコンピュータ(PC)200を備える。ミシン1Aとミシン1Bは、略同一の構成である。以下説明では、ミシン1Aとミシン1Bを総じて説明する場合、ミシン1とする。搬送装置100Aと搬送装置100Bは、略同一の構成である。以下説明では、搬送装置100Aと搬送装置100Bを総じて説明する場合、搬送装置100とする。
搬送システム300は、鉄又はアルミ製の棒材を矩形に組んだ二つのフレーム301、302を有する。フレーム301は、フレーム302の右側に配置する。フレーム301、302は、中段に棚板305を設ける。ミシン1Aは、フレーム301の棚板305上に固定する。搬送装置100Aは、ミシン1Aの右方に設ける。ミシン1Bは、フレーム302の棚板305上に固定する。搬送装置100Bは、ミシン1Bの右方に設ける。
搬送装置100Aは、移動機構120Aと布把持装置150Aを備える。移動機構120Aはミシン1Aの右方に設け、棚板305上に固定する。布把持装置150Aはミシン1Aの右前方に設け、布箱102Aは布把持装置150Aの左方に設ける。布箱102Aは、ミシン1Aが縫製する布105Aを積み重ねて収容する。布把持装置150Aと布箱102Aはミシン1Aの補助板5上に固定する。
搬送装置100Bは、移動機構120B、布把持装置150B、布把持装置150Cを備える。移動機構120Bはミシン1Bの右方に設け、棚板305上に固定する。布把持装置150Bはミシン1Bの右前方に設け、布箱102Bは布把持装置150Bの左方に設ける。布箱102Bは、ミシン1Bが縫製する布105Bを積み重ねて収容する。布把持装置150Bと布箱102Bはミシン1Bの補助板5上に固定する。布把持装置150Cはミシン1Bの左前方に設け、布箱102Cは布把持装置150Cの前方に設ける。布箱102Cは、ミシン1Bが縫製を終えた布105Cを積み重ねて収容する。布把持装置150Cと布箱102Cはミシン1Bの補助板5上に固定する。フレーム301、302は、ミシン1A、1Bの左右両側で補助板5と略同じ高さ位置に目隠し板306を設ける。
移動機構120Aと移動機構120Bは略同一の構成である。以下説明では、移動機構120Aと移動機構120Bを総じて説明する場合、移動機構120とする。布把持装置150A、布把持装置150B、布把持装置150Cは略同一の構成である。以下説明では、布把持装置150A、布把持装置150B、布把持装置150Cを総じて説明する場合、布把持装置150とする。布箱102A、布箱102B、布箱102Cは略同一の構成である。以下説明では、布箱102A、布箱102B、布箱102Cを総じて説明する場合、布箱102とする。また、布105A、布105B、布105Cを総じて説明する場合、布105とする。
ミシン1と搬送装置100は、夫々の制御部50、110(図11、図12参照)を収容する制御箱307を備える。制御箱307は、フレーム301、302夫々の棚板305の下方に設ける。フレーム301、302は、前枠上段に、強化ガラス又は透明なアクリル板からなる保護板(図示略)を取り付ける。保護板は左右にスライドして開閉する。
フレーム302は、下段に棚板308を設ける。PC200は棚板308上に配置する。PC200は、ミシン1の制御部50と搬送装置100の制御部110の夫々に電気的に接続する。PC200は、例えばノート型のPCであり、ミシン1と搬送装置100の動作を制御する。
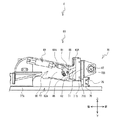
図2を参照しミシン1の機械的構成を説明する。ミシン1はベッド部2、脚柱部3、アーム部4を備える。ベッド部2は、棚板305上に配置する。ベッド部2は前後方向に延び、内部に垂直釜等(図示略)を備える。脚柱部3は、ベッド部2後側から上方に延びる。脚柱部3は、内部にミシンモータ31(図11参照)等を備える。アーム部4は、脚柱部3上端からベッド部2の上面に対向して前方に延び、前端に前端部7を備える。アーム部4は内部に主軸、針棒駆動機構(図示略)等を備える。針棒10は前端部7の下端から下方へ延びる。縫針11は針棒10の下端に装着する。
ミシン1はベッド部2の上方に補助板5と水平動機構6を備える。補助板5は針棒10よりも下方に位置し、水平方向に延びる上面を有する。補助板5は針板12を備える。針板12上面と補助板5上面は略同じ高さである。針板12は、針棒10に装着した縫針11直下の位置に、縫針11が挿通可能な針穴13を有する。
図2、図3、図4に示すように、水平動機構6は、押え腕65、X移動板(図示略)、Y移動板(図示略)、送り板77、Y移動腕66、X軸移動機構(図示略)、Y軸移動機構(図示略)、一対の上下駆動部80、保持体70を備える。X軸移動機構はベッド部2内部に設ける。X軸移動機構は、X軸モータ32(図11参照)を駆動源としてX移動板をX軸方向(左右方向)へ移動する。X移動板の上面は、前後方向に延びるレール(図示略)を備える。
Y移動板は、X移動板の上面のレール上に設ける。レールは、Y移動板を前後方向へ移動可能に支持する。即ちY移動板は、前後方向と左右方向に移動可能である。送り板77は、平面視略矩形状であり、補助板5よりも上方にある。送り板77の後端部77Aは、Y移動板の上面に接続する。送り板77は、Y移動板と共に、前後方向と左右方向に移動可能である。送り板77は、布105を支持可能である。押え腕65は、送り板77の後端部77Aから上側に延び、更に前側へ屈曲して延びる。押え腕65は送り板77と共に移動可能である。押え腕65は、左右方向に対称な形状を有する。以下、押え腕65の左右方向中心にて、前後方向と上下方向に延びる仮想面を、特定仮想面W(図32参照)という。押え腕65の前端部である先端部65Aは、送り板77よりも上側にある。先端部65Aは正面視で略矩形状である。押え腕65は、先端部65Aに、一対の挿通孔(図示略)を有する。一対の挿通孔は、特定仮想面Wを間にして並ぶ。挿通孔は、上下方向に長径を有する長孔であり、先端部65Aを前後方向に貫通する。
Y移動腕66は、支持部67と腕部68を備える。支持部67は左右方向に延びる。支持部67は、押え腕65の後部をX軸方向に移動可能に支持する。腕部68は支持部67後側に連結し、前後方向に延びる。腕部68は、ベッド部2内に設けたY軸移動機構に接続する。Y軸移動機構はY軸モータ34(図11参照)を駆動源として腕部68をY軸方向(前後方向)へ移動する。支持部67は、腕部68の移動に伴いY軸方向へ移動する。押え腕65は、Y移動腕66と共にY軸方向へ移動する。
図4、図5に示すように、一対の上下駆動部80は、押え腕65の左側と右側に夫々設ける。一対の上下駆動部80は、特定仮想面Wに対して対称となる位置にある。以下、押え腕65の左側に設けた上下駆動部80を説明する。
上下駆動部80はエアシリンダ69、回動部材81、昇降レバー82、連結部材83、一対のレール部84を備える。エアシリンダ69は、押え腕65左面にて支持する。エアシリンダ69は、ロッド69Aを直線移動する。回動部材81は、押え腕65から左方に突出する軸部85にて回動可能に支持し、ロッド69Aに連結する。回動部材81は、螺子86が締結する締結穴(図示略)を有する。
昇降レバー82は、回動部材81の左方で、軸部85に回動可能に支持する。昇降レバー82は、軸部85と直交して延びる板状である。昇降レバー82は、後端部に、回動部材81の締結穴に対向する挿通孔82Aを有する。挿通孔82Aは、軸部85を中心とした円弧状である。挿通孔82Aには、螺子86が挿通する。昇降レバー82は、回動部材81と共に回動する。昇降レバー82の前端部は、押え腕65の挿通孔(図示略)を介して、先端部65Aよりも前方に突出する。昇降レバー82が回動する時、昇降レバー82前端部は上下動する。
連結部材83は、先端部65Aの前方で、昇降レバー82の前端部に連結する。一対のレール部84は、先端部65Aの前面に設け、連結部材83を間にして左右方向に並ぶ。一対のレール部84は、連結部材83が上下動するのを案内する。
図5〜図7を参照し、保持体70を説明する。保持体70は押え腕65の先端部65Aに連結部材83を介して取り付ける。保持体70は、送り板支持機構90、第一支持具94、第二支持具95、エアシリンダ72を備える。送り板支持機構90は昇降板71、二股部97、三つのスライダ76、レール75、押え足73、押え板74を備える。昇降板71は、一対の上下駆動部80の夫々の連結部材83に固定する。昇降板71は、四つの特定締結穴(図示略)を有する。四つの特定締結穴の二つは、昇降板71の左部で上下方向に並び、残る二つの特定締結穴は、昇降板71の右部で上下方向に並ぶ。昇降板71左部の二つの特定締結穴と、昇降板71右部に設けた二つの特定締結穴は、特定仮想面W(図32参照)に対して互いに対称となる位置にある。昇降板71は、左面と右面の夫々に、上下方向に並ぶ二つの丸穴71A(図4参照)を備える。昇降板71左面にある二つの丸穴71Aと、昇降板71右面にある二つの丸穴71Aは、特定仮想面Wに対して互いに対称となる位置にある。
二股部97は、昇降板71の左面又は右面の何れかに固定する。以下、昇降板71右面に固定した状態の二股部97を説明する。二股部97は左側面視で略C字状の板状である。二股部97は、二つの挿通孔97A、一対の接触部97Bを備える。二つの挿通孔97Aは、夫々、昇降板71右面の二つの丸穴71Aに対向する。二つの締結螺子(図示略)が、夫々、挿通孔97Aに挿通し丸穴71Aに締結する。故に二股部97は昇降板71右面に固定する。一対の接触部97Bは、二つの挿通孔97Aよりも前方で、間を空けて上下方向に並ぶ。一対の接触部97Bは、前後方向に延びる。
三つのスライダ76は、昇降板71の前面下端部に固定する。三つのスライダ76は、左右方向に間隔を空けて並ぶ。レール75は、三つのスライダ76に対して左右方向に相対移動可能に連結する。レール75は、一対の接触部97Bの間となる上下方向位置にて、左右方向に延びる。
図5、図6に示すように、押え足73は複数の螺子(図示略)でレール75前面に固定する。押え足73は延設部73Aと連結部73Bを有する。延設部73Aは、左側面視でL字状であり、左右方向に延びる。延設部73Aは、三つの締結穴91を、左面と右面の夫々に有する。図5では、締結部材99は、延設部73A右面にある三つの締結穴91のうち後側二つの締結穴91に、締結する。詳細には、締結部材99は、軸部99Aと頭部99Bを備える。軸部99Aは左右方向に延びる。軸部99Aの一端部は、締結穴91に差し込んで締結する。頭部99Bは、軸部99Aの他端部に設ける。軸部99Aには、ナット98(図7参照)が挿通する。図7に示すように、ナット98は、延設部73A右面に当接する。本例では、締結部材99の頭部99Bはナット98から右方に離隔する。尚、図5ではナット98の図示を省略する(図33も同様)。
図5、図6に示すように、連結部73Bは、延設部73Aの左面又は右面に固定する。以下、延設部73A左面に固定した連結部73Bを説明する。連結部73Bは左右方向に厚さを有する板状である。連結部73Bは三つの挿通孔92を有する。各挿通孔92は、延設部73A左面の各締結穴91に対向する。三つの螺子93が夫々、挿通孔92に挿通して締結穴91に締結することで、連結部73Bは、延設部73A左面に固定する。螺子93の軸径は、締結部材99の軸径と同じである。
押え板74は押え足73の下端部に固定する。押え板74は、例えば金属製である。押え板74は水平方向に配置した板部材であり、平面視矩形状の開口を有する。押え板74の前端部74Aは、押え板74の後端部74Bよりも下方に突出する。前端部74Aは、送り板77よりも前側にある。後端部74Bは、送り板77と同じ前後方向位置にある。
第一支持具94は、昇降板71前面の左部と右部のうち何れか一方に固定し、第二支持具95は、何れか他方に固定する(図5、図35参照)。以下、昇降板71左部に固定した第一支持具94と、昇降板71右部に固定した第二支持具95の構成を説明する。
第一支持具94は固定部94Aと支持部94Bを有する。固定部94Aは昇降板71前面の左部に固定する板状である。固定部94Aは、上下方向に並ぶ二つの特定挿通孔94Cを備える。二つの特定挿通孔94Cは夫々昇降板71の左部にある二つの特定締結穴(図示略)に対向する。特定螺子(図示略)が、特定挿通孔94Cに挿通して特定締結穴に締結する。故に第一支持具94は二つの特定螺子で昇降板71前面の左部に固定する。支持部94Bは固定部94Aの右端から前方に延びる板状である。支持部94Bは、側面視円形状の支持孔(図示略)を有する。
第二支持具95は固定部95Aと支持部95Bを有する。固定部95Aは昇降板71前面の右部に固定する板状である。固定部95Aは左右方向に延び、左端部に上下方向に並ぶ二つの特定挿通孔95Cを備える。二つの特定挿通孔95Cは夫々昇降板71の右部にある二つの特定締結穴(図示略)に対向する。特定螺子(図示略)が、特定挿通孔95Cに挿通して特定締結穴に締結する。故に第二支持具95は二つの特定螺子で昇降板71前面の右部に固定する。第二支持具95が昇降板71に固定する位置は、特定仮想面Wに対して、第一支持具94が昇降板71に固定する位置と対称である。支持部95Bは固定部95Aの右端から前方に延びる板状である。支持部95Bは、側面視円形状の支持孔(図示略)を有する。第二支持具95の支持孔は、第一支持具94の支持孔と左右方向に並ぶ。
エアシリンダ72は第一支持具94と第二支持具95にて支持する。エアシリンダ72は、筒部72Aとロッド72Bを有する。筒部72Aは、第一支持具94の支持孔と第二支持具95の支持孔に夫々挿通して、左右方向に延びる。ロッド72Bは筒部72Aにて左右方向に進退可能に支持する。ロッド72Bは、筒部72Aから左方に進出する位置(図32参照)と、筒部72Aに退入する位置(図5参照)の間を、エアシリンダ72の駆動に応じて進退する。ロッド69Aの先端部は軸受87を固定する。軸受87は、押え足73の凹部73Cに離脱可能に嵌る。凹部73Cは、連結部73B上端に設ける。故に押え板74は、エアシリンダ72の駆動に伴い、押え足73、レール75と一体的に左右方向に移動できる。
押え板74は、エアシリンダ72の駆動に伴い、正位置(図5参照)と側方位置(図32参照)の間を移動する。押え板74が正位置にある時、締結部材99の頭部99Bは二股部97の一対の接触部97Bに左方から接触する(図5参照)。正位置にある押え板74は、平面視で、押え腕65の先端部65Aに対して前後方向に並ぶ。本例では、正位置にある押え板74の後端部74Bは、上方から送り板77に対向する(図示略)。押え板74が側方位置にある時、締結部材99は一対の接触部97Bから左方に離隔する。側方位置にある押え板74は、先端部65Aに対して左右方向においてずれる。本例では、側方位置にある押え板74は、平面視で、送り板77から左右方向にずれる。図5に示す状態では、正位置は、側方位置よりも右方にある。
上記構成を有する保持体70は、連結部材83と共に上下動する。保持体70が上下動することで、押え板74は押圧位置(図31参照)と離隔位置(図29参照)の間を上下動する。押え板74が押圧位置にある時、前端部74A下面は、補助板5上面と略同じ上下方向位置にあり、後端部74B下面は、送り板77上面と略同じ上下方向位置にある。故に、押え板74は、押圧位置且つ正位置にある時、送り板77、補助板5とは反対側から布105を挟んで保持する。押え板74が離隔位置にある時、押え板74は、送り板77と補助板5の夫々に対して上方に離隔する。
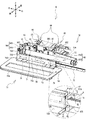
図8を参照し搬送装置100の機械的構成を説明する。搬送装置100は、移動機構120、吸着機構130、布把持装置150、撮影装置117、吸引機構140を備える。移動機構120は、内部に複数のアーム駆動モータ121(図12参照)を備える、所謂ロボットアームである。移動機構120は、支柱部131、第一腕部132、第二腕部133、第三腕部134を有する。支柱部131は上下方向に延び、下端部を棚板305上に固定する。支柱部131の上端部は第一腕部132の一端部に連結し、第一腕部132を水平回転可能に支持する。支柱部131は上端部内にアーム駆動モータ121を備え、アーム駆動モータ121の駆動により第一腕部132は回動する。第一腕部132は水平方向に延びる。第一腕部132の他端部は第二腕部133の一端部に連結し、第二腕部133を水平回転可能に支持する。第二腕部133は水平方向に延び、且つ他端部が上下方向に延びる。第二腕部133は一端部内にアーム駆動モータ121を備え、アーム駆動モータ121の駆動により第一腕部132に対して相対的に回動する。
第三腕部134は、上下方向に延びる棒状の部材である。第二腕部133の他端部は第三腕部134を上下動可能、且つ第三腕部134の軸中心に回転可能に保持する。第二腕部133は他端部内に二つのアーム駆動モータ121を備え、アーム駆動モータ121の駆動により第三腕部134は上下動し、且つ回転する。第三腕部134の下端部は吸着機構130の取付台124に接続する。
吸着機構130は取付台124と帯電装置135を備える。取付台124は平面視略矩形状の板部材である。帯電装置135は通電によって帯電する。帯電装置135は平面視略矩形の板状であり、取付台124の下部に固定する。帯電装置135の下面は吸着面136である。帯電装置135が帯電することで静電気を帯び、吸着面136に布105を吸着することができる。搬送装置100の制御部110(図12参照)は、複数のアーム駆動モータ121の駆動を夫々制御し、補助板5上で移動機構120の可動範囲内の任意の位置に、任意の向きで、帯電装置135を移動することができる。
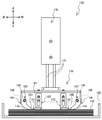
布把持装置150は、積み重なった複数の布105から一枚の布105を取り出す装置である。布把持装置150は、回動機構160、上下動機構170、把持機構180を備える。回動機構160は台座部161、エアシリンダ162、支柱163、回動腕164を備える。台座部161は箱状で、底部を補助板5上に固定する。支柱163は上下方向に延びる棒状である。台座部161は、支柱163をその軸中心に回転可能に支持する。支柱163の下端部は台座部161内に配置する。エアシリンダ162は台座部161の側部に設ける。エアシリンダ162のロッド165は台座部161内に配置し、支柱163の側方で左右方向に伸縮する。支柱163の下端部はピニオンギア(図示略)を備える。エアシリンダ162のロッド165はラックギア(図示略)を備え、ピニオンギアに噛合う。エアシリンダ162が駆動すると、支柱163は回動する。
回動腕164の一端部は、支柱163の上端部に固定する。回動腕164は水平方向に延び、他端部に上下動機構170を固定する。図9に示すように、上下動機構170は角形のエアシリンダであり、下方に伸縮する二本のロッド171を備える。把持機構180は、二本のロッド171の下端に接続する。
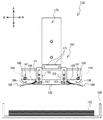
把持機構180は、支持部181、二つの脚部182、二つの足部183、二つの把持部184を備える。支持部181は左右方向に延び、側面視逆U字状に曲げ加工した板部材である。上下動機構170のロッド171下端は支持部181上面略中央に固定する。
二つの脚部182は支持部181に対して夫々上下動可能に支持部181に設ける。脚部182は、支持部181に対して相対的に上方に位置する「上位置」(図15参照)と、上位置よりも下方に位置する「下位置」(図9参照)との間で上下動する。脚部182の下端部は支持部181の下方に突出する。支持部181は脚部182を下方に付勢するバネ(図示略)を備える。脚部182はロック機構(図示略)を備える。ロック機構は、脚部182が下位置に位置する時に、上方向きの応力を受けて下位置から上位置に移動した時、脚部182を上位置に保持する。ロック機構は、脚部182が上位置に位置する時に、再び上方向きの応力を受けると、脚部182の上位置での保持を解除する。
二つの足部183は、夫々、脚部182の下端に固定する。足部183は板状で、脚部182の側方に突出する。二つの把持部184は、夫々、脚部182の側方に設ける。足部183は把持部184側に突出する。支持部181は、左右両端部に、前壁と後壁の間で延びる軸棒185を夫々備える。軸棒185は、把持部184の基端部189を挿通し、把持部184を回動可能に支持する。支持部181はバネ(図示略)を備え、把持部184の先端部188を基端部189の下方へ向けて付勢する。該時、把持部184は、先端部188が足部183に対し側方で対向する「開放位置」に位置する。把持部184は、バネの付勢力に抗して回動した時、先端部188が足部183の上方に位置する「閉鎖位置」に位置する。
支持部181は、軸棒185の上方に、前壁と後壁の間で延びるストッパ187を備える。把持部184が開放位置に位置する時、ストッパ187は基端部189に当接し、先端部188を足部183の側方に維持する。把持部184は、先端部188と基端部189との間に、下方向きに湾曲する湾曲面186を有する。把持部184は、先端部188表面から湾曲面186にかけて、布105に対する摩擦力が布105同士の摩擦力よりも大きいパッド(図示略)を備える。把持部184が開放位置から閉鎖位置に回動する時、把持部184は湾曲面186で布105に当接しながらパッドで布105を手繰り寄せる。
図8に示すように、補助板5は台座部161の後方に円形の窓部101を備える。窓部101は強化ガラス又は透明なアクリル板を固定する。フレーム301、302は、窓部101の下方に撮影装置117を固定する。撮影装置117は、窓部101を介して補助板5の上方を撮影する。移動機構120が帯電装置135を窓部101上方の「撮影位置」に移動した時、撮影装置117は帯電装置135の吸着面136と、吸着面136に吸着する布105を撮影する。
布箱102は台座部161の左方に設け、補助板5上に固定する。布箱102は平面視略矩形状であり、前後方向よりも左右方向が長い。縫製対象の布105は、布箱102内に積み重ねて配置する。本実施形態の布105は略長方形状である。布105は、長い辺を左右方向にして布箱102内に収容する。把持機構180が布箱102から一枚の布105を把持する時、回動機構160は、上下動機構170と把持機構180を布箱102上方の位置に回動する。図中の二点鎖線で示すように、布把持装置150A、150Bの回動機構160は、上下動機構170と把持機構180を布箱102A、102B上方の位置から略90度回動し、窓部101上方の位置に移動する。布把持装置150Cの回動機構160は、上下動機構170と把持機構180を布箱102C上方の位置から略180度回動する。補助板5上で窓部101付近の位置は、「配置位置」である。布把持装置150は、布箱102から取り出した一枚の布105を配置位置に配置する。移動機構120は、配置位置に帯電装置135を移動し、布105を受け取る。
補助板5は、布箱102の後方に開口部19を有する。開口部19は平面視略矩形状であり、前後方向よりも左右方向が長い。図10に示すように、吸引機構140は開口部19に設け、補助板5の下側に固定する。吸引機構140は、吸引箱141、流通板142、吸引バルブ145を備える。吸引箱141は上部を開放する箱状である。流通板142は開口部19に係合して吸引箱141を覆い、吸引箱141にネジ留めして固定する。流通板142上面と補助板5上面は略同じ高さである。流通板142はエアが流通する複数の流通穴143を有する。吸引バルブ145は吸引箱141の底部に接続する。吸引バルブ145はエアで駆動し、吸引箱141内のエアを吸引する。流通板142の上面は、布105を吸引可能な吸引面144である。補助板5における吸引面144の位置は、移動機構120の帯電装置135が吸着面136に吸着した布105を水平動機構6の押え板74に受け渡す「受渡位置」である。吸引機構140は移動機構120が受渡位置に配置した布105を吸引し、受け渡しが完了するまで布105を保持する。
ミシン1のエアシリンダ69、72、布把持装置150のエアシリンダ162、上下動機構170、吸引機構140の吸引バルブ145は、夫々、エアチューブを介してエアコンプレッサ(図示略)に接続する。
図11を参照しミシン1の電気的構成を説明する。ミシン1の制御部50は、CPU51、ROM52、RAM53、記憶装置54、通信インターフェース(I/F)55、入出力I/F56、駆動回路57〜59を備える。CPU51、ROM52、RAM53、記憶装置54は、バスを介して入出力I/F56と電気的に接続する。CPU51はミシン1の制御を司り、ROM52が記憶する各種プログラムに従い縫製に関わる各種演算と処理を実行する。ROM52は各種プログラム、各種初期設定パラメータ等を記憶する。RAM53はCPU51の演算結果、ポインタ、カウンタ等を一時的に記憶する。
記憶装置54は複数の模様の縫製データ、作業者が入力した各種設定情報等を記憶する不揮発性の記憶装置である。縫製データは、模様を縫製する為の複数の針落ち点が順に縫針11の直下に位置するように、保持体70を移動する為のデータである。針落ち点は針棒10と共に縫針11が下方に移動した時に縫針11が刺さる布105上の予定位置である。「縫製開始位置」は、最初の針落ち点に対応する保持体70の位置である。針落ち点の座標は保持体70の原点位置を基準位置とした座標である。保持体70の「原点位置」は、例えば、押え板74の中心点が縫針11の直下にある位置である。保持体70の原点位置は、本実施形態の例に限らない。例えば押え板74の他の位置が縫針11の直下にある位置としてもよい。
通信I/F55は入出力I/F56と電気的に接続する。通信I/F55は、例えばシリアル通信用のインターフェースである。通信I/F55はPC200の通信I/F210に接続する。駆動回路57〜59は入出力I/F56と電気的に接続する。駆動回路57はミシンモータ31と電気的に接続する。CPU51は駆動回路57を制御し、ミシンモータ31を駆動する。ミシンモータ31は主軸を回転する。
駆動回路58はX軸モータ32と電気的に接続する。駆動回路59はY軸モータ34と電気的に接続する。CPU51は駆動回路58、59を制御し夫々X軸モータ32とY軸モータ34を駆動する。X軸モータ32、Y軸モータ34は夫々ステッピングモータである。X軸モータ32、Y軸モータ34は夫々X軸移動機構、Y軸移動機構を駆動する。保持体70はX軸方向、Y軸方向に移動する。X軸モータ32、Y軸モータ34は夫々出力軸にX軸エンコーダ33、Y軸エンコーダ35を備える。X軸エンコーダ33、Y軸エンコーダ35は夫々入出力I/F56と電気的に接続する。X軸エンコーダ33、Y軸エンコーダ35は夫々X軸モータ32、Y軸モータ34の出力軸の回転角度に対応するカウント値を検出し、CPU51に出力する。CPU51はカウント値に基づいて保持体70の現在位置の座標を演算し、RAM53に記憶する。CPU51は縫製時にミシンモータ31を駆動して主軸を回転し、針棒10の上下動と垂直釜の駆動を制御する。CPU51は、ミシンモータ31の駆動と同時に縫製データに基づきX軸モータ32、Y軸モータ34を駆動することで水平動機構6の駆動を制御し、保持体70の押え板74が保持する布105を縫製する。
入出力I/F56はX方向原点センサ36、Y方向原点センサ37、電磁弁38、39と電気的に接続する。X方向原点センサ36はX軸移動機構に設ける。X方向原点センサ36は保持体70の原点設定に用いる。Y方向原点センサ37はY軸移動機構に設ける。Y方向原点センサ37は保持体70の原点設定に用いる。CPU51はX方向原点センサ36、Y方向原点センサ37の検出結果に基づきX軸モータ32、Y軸モータ34の駆動を制御する。縫製開始前、CPU51は保持体70を原点位置へ移動する。
電磁弁38は、エアコンプレッサがエアシリンダ69へ供給するエアの供給経路に設ける。CPU51は電磁弁38の開閉によってエアシリンダ69の駆動を制御し、押え板74を昇降する。電磁弁39は、エアコンプレッサが保持体70のエアシリンダ72へ供給するエアの供給経路に設ける。CPU51は電磁弁39の開閉によってエアシリンダ72の駆動を制御し、押え板74を左右に移動する。
図12を参照し搬送装置100の電気的構成を説明する。搬送装置100の制御部110は、CPU111、ROM112、RAM113、通信I/F114、入出力I/F115、駆動回路116を備える。CPU111、ROM112、RAM113はバスを介して入出力I/F115と電気的に接続する。CPU111は搬送装置100の制御を司り、ROM112が記憶する各種プログラムに従い処理を実行する。ROM112は各種プログラム、各種初期設定パラメータ等を記憶する。RAM113はCPU111の演算結果、各種データ等を一時的に記憶する。通信I/F114は入出力I/F115と電気的に接続する。通信I/F114は例えばシリアル通信用のインターフェースである。通信I/F114はPC200の通信I/F210に接続する。
駆動回路116は入出力I/F115と電気的に接続する。駆動回路116は複数のアーム駆動モータ121に接続する。アーム駆動モータ121はステッピングモータである。CPU111は駆動回路116を制御し、複数のアーム駆動モータ121を駆動する。複数のアーム駆動モータ121は、移動機構120の第一腕部132、第二腕部133、第三腕部134を駆動し、帯電装置135を移動する。複数のアーム駆動モータ121は、夫々の出力軸にアームエンコーダ122を備える。アームエンコーダ122は、夫々入出力I/F115と電気的に接続する。アームエンコーダ122は夫々アーム駆動モータ121の出力軸の回転角度に対応するカウント値を検出し、CPU111に出力する。CPU111はカウント値に基づいて第一腕部132、第二腕部133、第三腕部134の現在位置を演算し、RAM113に記憶する。CPU111は、複数のアーム駆動モータ121の駆動を制御することで、帯電装置135を配置位置と受渡位置との間で移動する。
入出力I/F115は複数のアーム原点センサ123、帯電装置135と電気的に接続する。複数のアーム原点センサ123は、第一腕部132、第二腕部133、第三腕部134夫々の回転軸と第三腕部134の上端位置に設ける。アーム原点センサ123は移動機構120を待機時形態にする設定に用いる。移動機構120の非動作時、CPU111はアーム原点センサ123の検出結果に基づき複数のアーム駆動モータ121の駆動を夫々制御して、移動機構120を待機時形態にする。待機時形態は、移動機構120の形態が他の装置の動作に干渉しない形態である。帯電装置135は駆動回路を含み、CPU111の制御で帯電する。
入出力I/F115は撮影装置117、電磁弁118、151、152と電気的に接続する。撮影装置117は、布把持装置150が配置位置に配置した布105を移動機構120が帯電装置135により吸着面136に吸着した時、吸着面136を撮影する。CPU111は、撮影装置117の撮影画像を解析し、解析結果に基づき保持位置の検出を行う。「保持位置」は、帯電装置135が吸着面136で布105を保持する位置である。CPU111は、予め、吸着面136に基準位置を設定する。「基準位置」は、布105を正確に受渡位置に移動する為、吸着面136で保持位置の基準として設定する位置である。CPU111は、保持位置の検出結果に基づき移動機構120を制御し、基準位置とのずれを修正することによって、布105を正確に受渡位置に移動することができる。
電磁弁118は、エアコンプレッサが吸引バルブ145へ供給するエアの供給経路に設ける。CPU111は電磁弁118を開閉し、吸引バルブ145の駆動と非駆動を制御する。電磁弁151は、エアコンプレッサがエアシリンダ162へ供給するエアの供給経路に設ける。CPU111は電磁弁151を開閉し、布把持装置150の支柱163の回動を制御し、把持機構180を布箱102上方の位置と配置位置上方の位置との間で移動する。電磁弁152は、エアコンプレッサが上下動機構170へ供給するエアの供給経路に設ける。CPU111は電磁弁152を開閉し、ロッド171の伸縮を制御して、把持機構180を上下動する。
図13を参照しPC200の電気的構成を説明する。PC200はCPU201を備える。CPU201はPC200の制御を司る。CPU201はチップセット204に接続し、チップセット204を介してROM202、RAM203、表示制御部208と電気的に接続する。チップセット204は、CPU201と、ROM202、RAM203、表示制御部208との間でデータの送受信を管理する一連の回路群である。ROM202はBIOS等を記憶する。RAM203は、種々の一時データを記憶する。表示制御部208は、ディスプレイ209への映像の表示を制御する。
チップセット204はチップセット205と接続する。CPU201は、チップセット205を介し、記憶装置206、入力部207、通信I/F210と電気的に接続する。チップセット205は、CPU201と、記憶装置206、入力部207、通信I/F210との間でデータの送受信を管理する一連の回路群である。記憶装置206は、例えばハードディスクドライブ(HDD)、ソリッドステートドライブ(SSD)等、不揮発性の記憶装置である。記憶装置206は、OS、各種アプリケーション、データ等を記憶する。入力部207は、キーボード、マウス等、PC200に対する操作の入力を行う装置である。通信I/F210は、例えばシリアル通信用のインターフェースである。通信I/F210はミシン1(ミシン1A、1B)、搬送装置100(搬送装置100A、100B)に接続する。
図9、図14〜図16を参照し、布把持装置150が布105を把持する動作を説明する。図9に示すように、布箱102に積み重ねて収容した布105から一枚の布105を布把持装置150が取り出す時、回動機構160は、上下動機構170と把持機構180を布箱102上に移動する。脚部182は下位置に位置し、把持部184は開放位置に位置する。図14に示すように、上下動機構170はロッド171を下方に伸ばし、把持機構180を布105上に下降する。足部183は最上位の布105に当接し、布105を押さえる。支持部181が下降するので、脚部182は相対的に上方へ移動する。
脚部182が下位置から上位置へ向けて移動する過程で、把持部184の湾曲面186は、最上位の布105に当接する。把持部184は軸棒185を支点に開放位置から閉鎖位置へ向けて回動する。先端部188は、脚部182に近付きながら支持部181に対して相対的に上方に移動する。把持部184の回動に伴い、湾曲面186が布105に当接する位置は、先端部188側から基端部189側に移動する。湾曲面186のパッドは、湾曲面186に当接した布105を先端部188側へ向けて手繰り寄せる。パッドの摩擦力は、布105同士の摩擦力より大きい。故に把持部184は、最上位の布105だけを手繰る。先端部188は足部183に対向する。よって把持部184は、湾曲面186に当接した布105の部分を足部183へ向けて送る。
把持部184が閉鎖位置に回動すると、先端部188は足部183の上方に位置する。図15に示すように、脚部182が上位置に位置する時、湾曲面186のパッドが手繰り寄せた布105の部分は略S字状に屈曲する。把持部184と足部183は、布105の屈曲部分を上下に挟む。脚部182が下位置から上位置に移動すると、ロック機構は脚部182を上位置に保持する。
図16に示すように、上下動機構170はロッド171を上方へ縮め、把持機構180を上昇する。把持機構180は、把持部184と足部183で一枚の布105を把持した状態を保持する。回動機構160は上下動機構170と把持機構180を配置位置上に移動し、上下動機構170は把持機構180を下降する。足部183が配置位置で補助板5上面に当接し、脚部182を支持部181に対して相対的に上方向きに移動すると、ロック機構は脚部182の保持を解除する。上下動機構170が把持機構180を上昇した時、脚部182はバネの付勢力により上位置から下位置に移動し、把持部184はバネの付勢力で閉鎖位置から開放位置に移動する。故に、布把持装置150は、把持部184と足部183による布105の把持を解除し、一枚の布105を配置位置に配置することができる。
図17〜図28を参照し、搬送システム300の動作を説明する。以下の説明では、ミシン1Aと搬送装置100Aに関する各位置と、ミシン1Bと搬送装置100Bに関する各位置とを区別して説明する場合、便宜上、ミシン1A、搬送装置100Aに関する各位置を位置Aとし、ミシン1B、搬送装置100Bに関する各位置を位置Bとする。搬送装置100Aが布箱102Aから取り出し、ミシン1Aが縫製する布105を布105Aとし、搬送装置100Bが布箱102Bから取り出す布105を布105Bとする。ミシン1Bは、布105Aと布105Bを重ね合わせて縫製する。
搬送システム300は、PC200のCPU201が記憶装置206に記憶するシステム制御処理のプログラムを実行し、ミシン1と搬送装置100の動作を制御して布105を縫製する一連の処理を行う。図19に示すように、作業者が搬送装置100の電源をオンにすると、CPU111は、ROM112から搬送制御処理のプログラムを読み出して実行する。CPU111は、PC200が送信する各種指示の信号の受信を待機する(S41:NO、S48:NO、S51:NO、S53:NO、S56:NO、S41)。図23に示すように、作業者がミシン1の電源をオンにすると、CPU51は、ROM52から縫製制御処理のプログラムを読み出して実行する。CPU51は、PC200が送信する各種指示の信号の受信を待機する(S121:NO、S129:NO、S132:NO、S121)。
図17に示すように、作業者がPC200の電源をオンにすると、CPU201はROM202に記憶するBIOSを立ち上げ、記憶装置206に記憶するOSを読み込んで実行する。作業者がPC200を操作し、システム制御処理の実行を指示すると、CPU201は記憶装置206からシステム制御処理のプログラムを読み出して実行する。
CPU201は、作業者の操作による加工数の入力を受け付ける。加工数は、搬送システム300の稼働によって縫製加工する縫製物の数である。作業者は、予め布箱102A、102Bに、加工数に応じた枚数の布105A、105Bを夫々積み重ねて収容する。CPU201は、作業者が入力した加工数をRAM203に記憶し、加工数を設定する(S1)。CPU201は、全装置(ミシン1A、1B、搬送装置100A、100B)に対して初期配置信号を送信し(S2)、全装置から配置完了信号を受信するまで待機する(S3:NO)。
図19に示すように、搬送装置100A、100BのCPU111は、初期配置信号を受信すると(S41:YES)、処理をS42へ進める。CPU111は、電磁弁152を作動して上下動機構170を駆動し、ロッド171を上方へ引き込む。布把持装置150A、150B、150C夫々の把持機構180は上昇する(S42)。CPU111は、電磁弁151を作動してエアシリンダ162を駆動し、支柱163を平面視反時計回りに回動する。布把持装置150A、150B、150C夫々の上下動機構170と把持機構180は、布箱102A、102B、102C上へ移動する(S43)。
CPU111は移動機構120を駆動し、待機時形態にする処理を行う(S44)。CPU111は、アームエンコーダ122のカウント値と、アーム原点センサ123の検出結果に基づき、移動機構120が待機時形態になるまで、複数のアーム駆動モータ121の駆動を制御する(S46:NO、S44)。移動機構120が待機時形態になると(S46:YES)、CPU111は、PC200に配置完了信号を送信する(S47)。CPU111は処理をS41に戻し、PC200からの各種指示の信号の受信を待機する。
図23に示すように、ミシン1A、1BのCPU51は、初期配置信号を受信すると(S121:YES)、処理をS122へ進める。CPU51は、電磁弁38を作動してエアシリンダ69を駆動し、昇降レバー82を介して保持体70を上昇する(S122)。図29に示すように、保持体70の押え板74は、押圧位置から離隔位置に上昇する。CPU51は、電磁弁39を作動してエアシリンダ72を駆動し、押え足73を左方へ移動する(S123)。図30に示すように、レール75が三つのスライダ76に対して左方に移動しながら、押え足73は正位置から側方位置に移動する。押え足73の左右方向中心は、送り板77の上方にない状態になる。
CPU51は、水平動機構6を駆動して保持体70を夫々の原点位置に移動する処理を行う(S126)。CPU51は、X軸エンコーダ33、Y軸エンコーダ35の各カウント値と、X方向原点センサ36、Y方向原点センサ37の各検出結果に基づき、保持体70が原点位置に移動するまで、X軸モータ32とY軸モータ34の駆動を制御する(S127:NO、S126)。保持体70が原点位置に移動すると(S127:YES)、CPU51は、PC200に配置完了信号を送信する(S128)。CPU51は処理をS121に戻し、PC200からの各種指示の信号の受信を待機する。
図17に示すように、PC200のCPU201は、全装置から配置完了信号を受信すると(S3:YES)、工程数として0を設定し、RAM203に記憶する(S4)。CPU201は、ミシン1A、1B、搬送装置100A、100Bが行う一連の処理の繰り返し回数を工程数として計数し、各装置の制御を行う。CPU201は、工程数が0でなければ処理をS7に進め(S6:NO)、工程数が0であれば処理をS9に進める(S6:YES)。S4で工程数を0に設定した後の処理であるので、CPU201はS6の処理で、S9に処理を進める。
CPU201は、工程数が加工数と同じでなければ処理をS11に進め(S9:NO)、工程数が加工数と同じであれば処理をS13に進める(S9:YES)。S9の処理で工程数が0の時、CPU201は搬送装置100Aに対して供給開始信号を送信し(S11)、ミシン1Aに対して受け取り準備信号を送信する(S12)。CPU201は、処理をS13に進める。
図19に示すように、搬送装置100AのCPU111は、供給開始信号を受信すると(S48:YES)、布供給処理を実行する(S49)。図20に示すように、CPU111は、電磁弁152を作動して布把持装置150Aの上下動機構170を駆動し、把持機構180を布箱102A内に下降する(S61)。把持機構180の足部183と把持部184は、布箱102A内の最上位の布105Aに当接し、布105Aを把持部184と足部183の間に挟む。脚部182が上位置に移動するとロック機構が作動し、把持機構180は布105Aを把持した状態を維持する。
CPU111は、電磁弁152を作動して上下動機構170を駆動し、把持機構180を上昇する(S62)。把持機構180は、布105Aを把持した状態を維持して布箱102A上方に上昇する。CPU111は、電磁弁151を作動してエアシリンダ162を駆動し、支柱163を平面視時計回りに略90度回動する。上下動機構170と把持機構180は、配置位置Aの上方へ移動する(S63)。
CPU111は、電磁弁152を作動して上下動機構170を駆動し、把持機構180を配置位置Aに向けて下降する(S64)。配置位置Aで足部183が補助板5上面に当接し、脚部182が上向きの押圧力を受けると、ロック機構は脚部182の保持を解除する。CPU111は、電磁弁152を作動して上下動機構170を駆動し、把持機構180を上昇する(S66)。把持機構180は、布105Aの把持を解除して、配置位置A上方に上昇する。布105Aは、布箱102A内に収容する向きに対し略90度時計回りに回転した向きで、配置位置Aに残る(図25参照)。CPU111は、電磁弁151を作動してエアシリンダ162を駆動し、支柱163を平面視反時計回りに略90度回動する。上下動機構170と把持機構180は、布箱102A上へ移動する(S67)。
CPU111は、移動機構120Aのアーム駆動モータ121を駆動し、帯電装置135を配置位置Aに移動する(S68)。CPU111は予め作成したプログラムに従って移動機構120Aを制御し、帯電装置135を配置位置Aの定位置に移動する。帯電装置135を配置位置Aに移動する時、CPU111は移動機構120Aの第三腕部134を回転する。図25に一点鎖線で示すように、帯電装置135は、待機時形態の向き(図8参照)に対し平面視略90度回転した向きで配置位置Aに位置する。
CPU111は帯電装置135を駆動する(S69)。帯電装置135は静電気を帯び、吸着面136に配置位置Aの布105Aを吸着する。CPU111は、移動機構120Aのアーム駆動モータ121を駆動し、帯電装置135を撮影位置Aに移動する(S71)。「撮影位置」は、撮影装置117で窓部101を介して吸着面136を撮影する為、吸着面136を配置する所定の位置である。CPU111は、窓部101上方且つ補助板5から所定高さの撮影位置Aに、吸着面136を配置する。
CPU111は、撮影装置117で吸着面136を撮影し、RAM113に撮影画像を保存する(S72)。CPU111は、撮影画像を解析する(S73)。CPU111は、撮影画像に対し、例えば、予め用意した吸着面136と布105Aのテンプレート画像を用い、公知のパターン検出処理を行う。図25に示すように、CPU111は、テンプレート画像の吸着面136と布105Aの四隅の位置に基づき、布105Aの四つ角の位置に対応する点P1〜P4で囲う矩形領域で示す基準位置を設定し、例えば点P1を原点とする座標系を設定する。CPU111は、撮影画像の布105Aの四つ角の位置を示す点Q1〜Q4で囲う矩形領域を保持位置として検出する。
図20に示すように、CPU111は、基準位置に対する保持位置の相対的な位置座標と回転角度を演算する(S74)。具体的に、CPU111は、点P1、P2に対する点Q1、Q2の相対的な位置座標に基づき、点P1と点Q1との距離と、線分P1−P2に対する線分Q1−Q2の回転角度を演算によって求める。点P1と点Q1との距離が所定の距離以下であり、且つ、線分P1−P2に対する線分Q1−Q2の回転角度が所定の角度範囲内である場合、CPU111は、保持位置が許容範囲内にあると判断する。保持位置が許容範囲内にある時(S76:YES)、CPU111は、保持位置の演算結果に基づき、移動機構120Aのアーム駆動モータ121を駆動して帯電装置135を受渡位置Aへ移動する(S81)。図25に示すように、例えば保持位置(点Q1〜Q4)は基準位置(点P1〜P4)と一致する時がある。この時、CPU111は、受渡位置Aに設定する点R1〜R4に、基準位置を示す点P1〜P4が重なるように移動機構120Aを制御し、帯電装置135を移動する。帯電装置135は二点鎖線で示す位置に移動し、布105Aを受渡位置Aに正確に配置する。CPU111は、処理をS82に進める。
図26に示すように、例えば保持位置(点Q1〜Q4)は基準位置(点P1〜P4)からずれて位置するが、許容範囲内にある時がある。この時、CPU111は、受渡位置に設定する点R1〜R4に、保持位置を示す点Q1〜Q4が重なるように、保持位置の演算結果に応じて帯電装置135の移動先の位置を修正する。帯電装置135は二点鎖線で示す位置に移動し、布105Aを受渡位置Aに正確に配置する。CPU111は、処理をS82に進める。
図20に示すように、保持位置が許容範囲内にない時(S76:NO)、CPU111は、移動機構120Aのアーム駆動モータ121を駆動し、帯電装置135を調整位置Aへ移動する(S77)。「調整位置」は、帯電装置135が吸着面136のいかなる位置に布105Aを保持していても、帯電装置135が布箱102A、及び針穴13の上方に位置する針棒10等に干渉せずに、布105Aを配置可能な補助板5上の位置である。本実施形態の調整位置Aは、平面視で布箱102A、針板12、吸引機構140、窓部101で取り囲む領域内の位置である。
図27に示すように、CPU111は、保持位置の演算結果に基づき二点鎖線で示す位置に帯電装置135を移動し、調整位置Aに布105Aを配置する。図20に示すように、CPU111は、帯電装置135の駆動を停止する(S78)。帯電装置135は吸着面136への布105Aの吸着を解除し、布105Aを調整位置Aに配置する。CPU111は、保持位置の演算結果に基づき、基準位置と調整位置Aの布105Aとの相対位置を修正する(S79)。図28に示すように、CPU111は、保持位置の演算結果に基づいて移動機構120Aのアーム駆動モータ121を駆動し、帯電装置135を移動する。帯電装置135は、調整位置Aに配置した布105Aの四隅の位置を示す点Q1〜Q4に、基準位置を示す点P1〜P4が重なるように、一点鎖線で示す位置に移動する。
図20に示すように、CPU111は、処理をS69に戻し、帯電装置135を駆動して布105Aを吸着面136に吸着する。CPU111は、保持位置が許容範囲内に位置するまで、S69〜S79の処理を繰り返す。保持位置が許容範囲内に位置したら、CPU111は、帯電装置135を受渡位置Aへ移動し、処理をS82に進める。
CPU111は、電磁弁118を作動し、吸引バルブ145を駆動する(S82)。吸引バルブ145は吸引箱141内のエアを外部に排出し、流通板142の流通穴143を介して吸引面144上の布105Aを吸引する。吸引機構140は、布105Aを受渡位置Aに位置決めする。CPU111は、帯電装置135の駆動を停止する(S83)。帯電装置135は吸着面136への布105Aの吸着を解除する。CPU111は移動機構120Aを駆動し、待機時形態にする処理を行う(S84)。CPU111は移動機構120Aが待機時形態になるまで、アーム駆動モータ121の駆動を制御する(S86:NO、S84)。移動機構120Aが待機時形態になると(S86:YES)、CPU111は、PC200に供給完了信号を送信する(S87)。CPU111は処理を搬送制御処理のS41に戻し、PC200からの各種指示の信号の受信を待機する。
図23に示すように、ミシン1AのCPU51は、受取準備信号を受信すると(S129:YES)、水平動機構6のX軸移動機構とY軸移動機構を駆動して、保持体70を引取位置Aに移動する(S131)。「引取位置」は、針板12の右方の位置であり、送り板77が、受渡位置の布105後部の下方に入り込むことができる位置である。図30に示すように、保持体70の移動後、送り板77は、受渡位置Aの布105A後部を下方から支持する(S131)。結果、布105Aの後部は送り板77に載置し、布105Aの前部は補助板5に載置した状態になる。CPU51は処理をS121に戻し、PC200からの各種指示の信号の受信を待機する。
図17に示すように、PC200のCPU201は、S13の処理で、工程数が0でなければ処理をS14に進め(S13:NO)、工程数が0であれば処理をS17に進める(S13:YES)。S13の処理で工程数が0の時、CPU201は、供給開始信号を送信した全ての搬送装置100から、供給完了信号を受信するまで待機する(S17:NO)。CPU201は、工程数が0の時は搬送装置100Aに供給開始信号を送信したので、搬送装置100Aから供給完了信号を受信すると(S17:YES)、処理をS18に進める。図18に示すように、CPU201は、工程数が加工数と同じでなければ処理をS19に進め(S18:NO)、工程数が加工数と同じであれば処理をS21に進める(S18:YES)。S18の処理で工程数が0の時、CPU201はミシン1Aに対して縫製開始信号を送信し(S19)、処理をS21に進める。
図23に示すように、ミシン1AのCPU51は、縫製開始信号を受信すると(S132:YES)、縫製処理を実行する(S133)。図24に示すように、CPU51は電磁弁39を作動してエアシリンダ72を駆動し、押え足73を昇降板71に対して右方へ移動する。二つの締結部材99の頭部99Bが夫々一対の接触部97Bに左方から接触することで(図5参照)、押え足73は右方への移動を停止する。該時、押え板74は側方位置から正位置に移動する(S141)。CPU51は、電磁弁38を作動してエアシリンダ69を駆動し、昇降レバー82を介して保持体70を下降する(S142)。図31に示すように、押え板74は、離隔位置から押圧位置に下降する。押え板74の後端部74Bは、受渡位置Aにある布105A後部を送り板77との間で挟んで保持し、押え板74の前端部74Aは、受渡位置Aにある布105A前部を補助板5との間で挟んで保持する。図31では布105Aの図示を省略する。CPU51は、PC200に受取完了信号を送信する(S143)。
CPU51は水平動機構6のX軸移動機構とY軸移動機構を駆動して、保持体70を縫製開始位置に移動する処理を行う(S147)。CPU51はミシンモータ31を駆動し(S148)、縫製データに従って保持体70を移動し、布105Aを縫製する(S149)。具体的には、CPU51は、ミシンモータ31を駆動して主軸を回転駆動することで、針棒10の上下動と垂直釜の駆動を制御する。CPU51は、主軸の回転駆動と同期した速度で、縫製データが示す回転方向、駆動パルス数のパルスをX軸モータ32、Y軸モータ34に与える。CPU51は、保持体70を針落ち点に対応する位置へ順に移動し、布105Aに縫目を形成する縫製動作を継続する(S151:NO、S149)。
縫製データに基づく縫目を形成し、縫製が完了すると(S151:YES)、CPU51は、ミシンモータ31の駆動を停止する(S152)。CPU51は水平動機構6のX軸移動機構とY軸移動機構を駆動して、保持体70を差出位置Aへ移動する(S153)。「差出位置」は、針板12の左方の位置であり、縫製を終えた布105Aを、補助板5上の「引継位置」に配置可能な位置である。引継位置Aは、ミシン1Aが縫製を終えた布105Aを搬送装置100Bが受け取る位置である。保持体70が差出位置Aに位置し、且つ押え板74が側方位置Aに位置する時の布105Aは引継位置Aに位置する。引継位置Bは、布把持装置150Cが布箱102C上から略180度回動し、ミシン1Bが縫製を終えた布105Cを把持可能な位置である。
CPU51は電磁弁39を作動してエアシリンダ72を駆動し、押え足73を昇降板71に対して左方へ移動する(S154)。図32に示すように、押え板74は正位置から側方位置へ移動する(S154)。該時、押え板74の上下方向位置は押え位置である。故に押え板74は布105と共に左方に移動する。布105Aは、押え板74と共に引継位置Aに移動する。図24に示すように、CPU51は、電磁弁38を作動してエアシリンダ69を駆動し、昇降レバー82を介して押え足73を上昇する(S156)。押え板74は押圧位置から離隔位置に移動する(S156)。
CPU51は水平動機構6のX軸移動機構とY軸移動機構を駆動して、保持体70を基準位置Aに移動する(S158)。基準位置は、原点位置に基づいて予め設定した保持体70の位置である。CPU51は、保持体70が基準位置Aに移動するまでX軸モータ32とY軸モータ34の駆動を制御する(S159:NO、S158)。該時、布105Aは引継位置Aにある状態を維持し、送り板77は基準位置Aへ移動する。保持体70が基準位置Aに位置すると(S159:YES)、CPU51は、PC200に縫製完了信号を送信する(S161)。CPU51は処理を縫製制御処理のS121に戻し、PC200からの各種指示の信号の受信を待機する。
図18に示すように、PC200のCPU201は、S21の処理で、工程数が0でなければ処理をS22に進め(S21:NO)、工程数が0であれば処理をS23に進める(S21:YES)。S21の処理で工程数が0の時、CPU201は、受取完了信号の受信と、縫製開始信号を送信した全てのミシン1からの縫製完了信号の受信を待機する(S23:NO、S26:NO、S23)。ミシン1が縫製動作の開始前に送信する受取完了信号を受信すると(S23:YES)、CPU201は、受取完了信号送信元のミシン1に対応する搬送装置100に吸引停止信号を送信する(S24)。即ちCPU201は、ミシン1Aから受取完了信号を受信した時には搬送装置100Aに吸引停止信号を送信し、ミシン1Bから受取完了信号を受信した時には搬送装置100Bに吸引停止信号を送信する。CPU201は、処理をS26へ進める。
図19に示すように、搬送装置100のCPU111は、吸引停止信号を受信すると(S51:YES)、電磁弁118を作動して吸引バルブ145の駆動を停止する(S52)。吸引機構140は、布105Aの吸引を停止する。吸引機構140の吸引が停止しても、ミシン1Aが押え板74と補助板5の間に布105Aを挟んで保持するので、布105Aは受渡位置Aに位置決めした状態を維持する。CPU111は処理をS41に戻し、PC200からの各種指示の信号の受信を待機する。
図18に示すように、PC200のCPU201は、S26の処理で、縫製開始信号を送信した全てのミシン1からの縫製完了信号を受信すると(S26:YES)、処理をS27に進める。CPU201は、工程数が0の時はミシン1Aに縫製開始信号を送信したので、ミシン1Aから縫製完了信号を受信すると、処理をS27に進める。CPU201は、工程数が0でなければ処理をS28に進め(S27:NO)、工程数が0であれば処理をS31に進める(S27:YES)。
S27の処理で工程数が0の時、CPU201は、工程数に1を加算する(S31)。CPU201は、工程数が加工数より大きいか否か判断し(S32)、加工数以下なら処理をS6に戻す(S32:NO)。
以上のように工程数が0の時、CPU201は搬送装置100Aを制御し、布把持装置150Aで布箱102Aから取り出した布105Aを移動機構120Aで受渡位置Aに配置する。CPU201はミシン1Aを制御し、受渡位置Aで布105Aを受け取り縫製する。ミシン1Aは、縫製した布105Aを引継位置Aに配置する。この間、搬送装置100Bとミシン1Bは処理を待機する。
図17に示すように、工程数が1以上加工数未満の時、CPU201はS6〜S32の全ての処理を繰り返して実行する。工程数が0でない時(S6:NO)、CPU201は搬送装置100Bに引継開始信号を送信する(S7)。CPU201は、搬送装置100Bから引継完了信号を受信するまで待機する(S8:NO)。
図19に示すように搬送装置100BのCPU111は、引継開始信号を受信すると(S53:YES)、布引継処理を実行する(S54)。図21に示すように、CPU111は、移動機構120Bのアーム駆動モータ121を駆動し、帯電装置135を引継位置Aへ移動する(S91)。CPU111は予め作成したプログラムに従って移動機構120Bを制御し、帯電装置135を引継位置Aの定位置に移動する。
以下のS92〜S111の処理は、布供給処理のS69〜S86の処理と略同様であるので説明を簡略化する。CPU111は帯電装置135を駆動し、引継位置Aの布105Aを吸着面136に吸着する(S92)。CPU111は、帯電装置135を撮影位置Bに移動する(S93)。CPU111は、撮影装置117で吸着面136を撮影し(S94)、撮影画像を解析する(S96)。CPU111は、基準位置に対する保持位置の相対的な位置座標と回転角度を演算する(S97)。保持位置が許容範囲内にある時(S98:YES)、CPU111は、保持位置の演算結果に基づき、帯電装置135を受渡位置Bへ移動する(S106)。
保持位置が許容範囲内にない時(S98:NO)、CPU111は、帯電装置135を調整位置Bへ移動する(S99)。CPU111は帯電装置135の駆動を停止し、布105Aを調整位置Bに配置する(S101)。CPU111は保持位置の演算結果に基づき、帯電装置135を移動して基準位置と調整位置Bの布105Aとの相対位置を修正する(S102)。CPU111は、布105Aを基準位置に保持可能な位置に帯電装置135を移動する。
CPU111は処理をS92に戻し、帯電装置135により布105Aを吸着面136に吸着する。CPU111は、保持位置が許容範囲内に位置するまで、S92〜S102の処理を繰り返す。保持位置が許容範囲内に位置したら、CPU111は、帯電装置135を受渡位置Bへ移動し、処理をS107に進める。
CPU111は吸引バルブ145を駆動し(S107)、布105Aを受渡位置Bに位置決めする。CPU111は、帯電装置135の駆動を停止し(S108)、吸着面136への布105Aの吸着を解除する。CPU111は移動機構120Bを駆動し、待機時形態にする処理を行う(S109)。CPU111は移動機構120Bを待機時形態にする為、アーム駆動モータ121の駆動を制御する(S111:NO、S109)。
移動機構120Bが待機時形態になると(S111:YES)、CPU111は吸引バルブ145の駆動を停止し(S112)、PC200に引継完了信号を送信する(S113)。CPU111は処理を搬送制御処理のS41に戻し、PC200からの各種指示の信号の受信を待機する。
図17に示すように、PC200のCPU201はS8の処理で、搬送装置100Bから引継完了信号を受信すると(S8:YES)、処理をS9に進める。工程数が加工数と同じでない時(S9:NO)、CPU201は搬送装置100Aに供給開始信号を送信し(S11)、ミシン1Aに受取準備信号を送信し(S12)、処理をS13に進める。ミシン1Aは保持体70を引取位置Aに移動する。搬送装置100Aは布供給処理を実行し、布箱102Aから新たに布105Aを取り出し、受渡位置Aに配置する。搬送装置100Aは処理を完了したらPC200に供給完了信号を送信する。
S13の処理で工程数が0でない時(S13:NO)、CPU201は搬送装置100Bに供給開始信号を送信し(S14)、ミシン1Bに受取準備信号を送信し(S16)、処理をS17に進める。ミシン1Bは保持体70を引取位置Bに移動する。搬送装置100Bは布供給処理を実行し、布箱102Bから取り出した布105Bを受渡位置Bで布105Aに重ねて配置する。搬送装置100Bは処理を完了したらPC200に供給完了信号を送信する。
CPU201は搬送装置100A、100Bに供給開始信号を送信したので、搬送装置100A、100Bの双方から供給完了信号を受信すると(S17:YES)、処理をS18に進める。図18に示すように、CPU201は、S18の処理で工程数が加工数と同じでない時、ミシン1Aに縫製開始信号を送信し(S19)、処理をS21に進める。ミシン1Aは縫製処理を実行し、搬送装置100Aが受渡位置Aに新たに配置した布105Aを受け取り、押え板74に保持して縫製する。詳細には、押え板74は側方位置且つ離隔位置にある(S154、S156)。CPU51が、保持体70を引取位置Aに移動すると(S131)、送り板77は、布105Aを受渡位置Aに新たに配置する時に布105A後部の下方に入り込む。CPU51は、押え板74を側方位置から正位置へ移動した後(S141)、押え板74を離隔位置から押圧位置に移動する(S143)。ミシン1Aは縫製動作を実行する(S149、S151:YES)。ミシン1Aは、縫製した布105Aを引継位置Aに配置すると、CPU51はPC200に縫製完了信号を送信する。
CPU201は、S21の処理で工程数が0でない時、ミシン1Bに縫製開始信号を送信し(S22)、処理をS23に進める。ミシン1Bは搬送装置100Bが受渡位置Bに重ねて配置した布105A、105Bを受け取り、押え板74に保持して縫製する。ミシン1Bは縫製動作を終え、縫製した布105Cを引継位置Bに配置すると、PC200に縫製完了信号を送信する。
CPU201は、ミシン1A、1Bに縫製開始信号を送信したので、ミシン1A、1Bの双方から縫製完了信号を受信すると(S26:YES)、処理をS27に進める。CPU201は、工程数が0ではないので(S27:NO)、搬送装置100Bに回収指示信号を送信する(S28)。CPU201は、搬送装置100Bから回収完了信号を受信するまで待機する(S29:NO)。
図19に示すように、搬送装置100BのCPU111は、回収指示信号を受信すると(S56:YES)、布回収処理を実行する(S57)。図22に示すように、CPU111は、電磁弁151を作動して布把持装置150Cのエアシリンダ162を駆動し、支柱163を平面視時計回りに略180度回動する。上下動機構170と把持機構180は、引継位置Bの上方へ移動する(S171)。
CPU111は電磁弁152を作動して布把持装置150Cの上下動機構170を駆動し、把持機構180を引継位置Bへ向けて下降する(S172)。把持機構180の足部183と把持部184は、引継位置Bで布105Cに当接し、布105Cを把持部184と足部183の間に挟む。脚部182が上位置に移動するとロック機構が作動し、把持機構180は布105Cを把持した状態を維持する。CPU111は、電磁弁152を作動して上下動機構170を駆動し、把持機構180を上昇する(S173)。把持機構180は、布105Cを把持した状態を維持して引継位置B上方に上昇する。
CPU111は、電磁弁151を作動してエアシリンダ162を駆動し、支柱163を平面視反時計回りに略180度回動する。上下動機構170と把持機構180は、布箱102Cの上方へ移動する(S174)。CPU111は電磁弁152を作動して上下動機構170を駆動し、把持機構180を布箱102C内に下降する(S176)。足部183が布箱102C内で補助板5上面又は収容済みの布105Cに当接し、脚部182が上向きの押圧力を受けると、ロック機構は脚部182の保持を解除する。CPU111は、電磁弁152を作動して上下動機構170を駆動し、把持機構180を上昇する(S177)。把持機構180は、布105Cの把持を解除して、布箱102C上方に上昇する。布105Cは布箱102C内に残る。CPU111はPC200に回収完了信号を送信する(S178)。CPU111は処理を搬送制御処理のS41に戻し、PC200からの各種指示の信号の受信を待機する。
図18に示すように、PC200のCPU201は、S29の処理で、搬送装置100Bから回収完了信号を受信すると(S29:YES)、工程数に1を加算する(S31)。CPU201は、工程数が加工数以下なら処理をS6に戻す(S32:NO)。
以上のように、工程数が1以上、加工数未満の時、CPU201は搬送装置100Bを制御し、ミシン1Aが縫製した布105Aを移動機構120Bで引継位置Aから受渡位置Bに移動する。CPU201は、搬送装置100Bを制御し、布把持装置150Bで布箱102Bから取り出した布105Bを移動機構120Bで受渡位置Bに移動し、布105Aに重ねて配置する。CPU201はミシン1Bを制御し、受渡位置Aで布105Aと布105Bを受け取り縫い合わせる。ミシン1Bは、縫製した布105Cを引継位置Bに配置する。並行してCPU201は搬送装置100Aを制御し、布把持装置150Aで布箱102Aから取り出した布105Aを移動機構120Aで受渡位置Aに配置する。CPU201はミシン1Aを制御し、受渡位置Aで布105Aを受け取り縫製する。ミシン1Aは、縫製した布105Aを引継位置Aに配置する。CPU201は搬送装置100Bを制御し、ミシン1Bが縫製した布105Cを、布把持装置150Cで布箱102Cに収容する。
図17に示すように、S6〜S32の処理を繰り返し、工程数が加工数と同じになった時、CPU201は、S11、S12、S19の処理を省いて実行する。S7の処理で、CPU201は搬送装置100Bに引継開始信号を送信する。搬送装置100Bは、ミシン1Aが引継位置Aに配置した布105Aを受渡位置Bに移動し、PC200に引継完了信号を送信する。CPU201は、S14の処理で搬送装置100Bに供給開始信号を送信し、S16の処理でミシン1Bに受取準備信号を送信する。ミシン1Bは保持体70を引取位置Bに移動する。搬送装置100Bは布105Bを受渡位置Bで布105Aに重ねて配置する。配置後、搬送装置100BはPC200に供給完了信号を送信する。
CPU201は、S22の処理でミシン1Bに縫製開始信号を送信する。ミシン1Bは受渡位置Bの布105A、105Bを押え板74で保持し、縫製する。縫製後、ミシン1Bは布105Cを引継位置Bに配置し、PC200に縫製完了信号を送信する。CPU201は、S28の処理で搬送装置100Bに回収指示信号を送信する。搬送装置100Bは、布把持装置150Cで布105Cを布箱102C内に収容し、PC200に回収完了信号を送信する。この間、搬送装置100Aとミシン1Aは処理を待機する。S31の処理で、CPU201は工程数に1を加算する。工程数は加工数より大きくなる(S32:YES)。CPU201はシステム制御処理の実行を終了する。
図5、図7を参照し、作業者が正位置を左右方向に調整する方法を説明する。作業者は、ナット98を緩めた後、締結部材99を脱落しない程度に右側面視反時計回りに回転する。締結部材99の頭部99Bは右方に変位する。作業者はナット98を再び締付ける。ナット98が延設部73Aの右面に当接し、調整作業は完了する。頭部99Bとナット98の離隔距離は、長くなる。頭部99Bとナット98の離隔距離は、寸法Lに相当する。頭部99Bが右方に変位することで、押え板74の正位置は左方に変位する。故に作業者は、押え板74の正位置を左右方向に調整できる。
図5〜図7、図33〜図35を参照し、作業者がエアシリンダ72を反転して先端部65Aに付替える方法を説明する。図5で示すエアシリンダ72は、付替前の状態である。作業者は、特定挿通孔94C、95Cに挿通した四本の特定螺子を外す。第一支持具94と第二支持具95は、夫々、エアシリンダ72を支持する状態で、連結部材83から外れる。作業者は、エアシリンダ72、第一支持具94、第二支持具95を、上方へ引き上げる。エアシリンダ72の軸受87は、連結部73Bの凹部73Cから外れる。作業者は、延設部73A右面に締結した二つの締結部材99と、延設部73Aの左面に締結した三つの螺子93を、取り外す。故にナット98、締結部材99、螺子93、連結部73Bは、延設部73Aから外れる。作業者は、二つの締結部材99を、延設部73A左面にある三つの締結穴のうち、後側二つに締結する(図33参照)。該時、各ナット98は、各締結部材99の軸部99Aに挿通して、延設部73A左面に当接する(図示略)。作業者は、三つの螺子93で、連結部73Bを延設部73A右面に固定する(図34参照)。以下、締結部材99を延設部73A左面に固定し且つ連結部73Bを延設部73A右面に固定した押え足73を、「付替後の押え足73」という。
作業者は、昇降板71右面に固定した二つの締結螺子(図示略)を取り外し、二股部97を昇降板71右面から外す。作業者は、締結螺子を、二股部97の挿通孔97Aに挿通して、昇降板71左面の丸穴71Aに締結する(図示略)。二股部97は昇降板71左面に固定する。以下、昇降板71左面に固定した二股部97を「付替後の二股部97」という。
作業者は、エアシリンダ72、第一支持具94、第二支持具95を、一体的に正面視で180°回転する。作業者は、エアシリンダ72の軸受87を凹部73Cに嵌める。作業者は、第一支持具94の特定挿通孔95Cに挿通した特定螺子を、昇降板71右部の特定締結穴に締結する。同様に、作業者は、第二支持具95の特定挿通孔95Cに挿通した特定螺子を、昇降板71左部の特定締結穴に締結する。故に第一支持具94は昇降板71右部に固定し、第二支持具95は昇降板71左部に固定する(図35参照)。以下、該状態のエアシリンダ72を「付替後のエアシリンダ72」という。故に付替後の押え足73は、付替後のエアシリンダ72に連結する(図35参照)。
第一支持具94を昇降板71に固定する位置と、第二支持具95を昇降板71に固定する位置は、特定仮想面Wに対して対称である。連結部73Bを延設部73A右面に固定する位置と、連結部73Bを延設部73A左面に固定する位置は、押え足73の左右方向中央に対して対称である。二股部97を昇降板71右面に固定する位置と、二股部97を昇降板71左面に固定する位置は、特定仮想面Wに対して対称である。故に、エアシリンダ72の付替後と付替前で、押え板74の送り板77に対する相対位置は、同じである。
付替後のエアシリンダ72では、付替前のエアシリンダ72と同様、ロッド72Bが筒部72Aに退入した時、押え板74は正位置にある。ロッド72Bが筒部72Aから右方に進出した時、押え板74は側方位置にある。図35では、正位置にある押え板74を実線で図示し、側方位置にある押え板74を二点鎖線で図示する。エアシリンダ72の付替前と付替後で、押え板74の正位置は不変である。故に、エアシリンダ69の付替前の状態とエアシリンダ69の付替後の状態の何れの状態であっても、正位置にある押え板74は、平面視で、押え腕65の先端部65Aに対して前後方向に並ぶ。一方、エアシリンダ72の付替前と付替後で、押え板74の側方位置は、特定仮想面Wを基準に反転する。即ち、昇降板71は、ロッド72Bが筒部72Aから右方に進出する形態のエアシリンダ72を支持する。
以上説明したように、エアシリンダ72が駆動することで、押え板74は正位置と側方位置の間を移動する。側方位置にある押え板74は、正位置から左右方向にずれる。故に押え板74の左右方向中心は送り板77の上方にない状態になる。保持体70が引取位置に移動することで、送り板77は布105後部に入り込むことができる(S131)。即ち、ミシン1の水平動機構6は布105を送り板77に載置できる。該時、布105は、押え板74に接触しにくい。故にミシン1の水平動機構6は、布105を送り板77に載置し易くできる。
エアシリンダ72がロッド72Bを進退することで、押え板74は正位置と側方位置の間を移動する。故に水平動機構6は押え板74の左右方向の移動を安定化できる。
作業者が締結部材99を回転することで、頭部99Bが二股部97の一対の接触部97Bに接触する位置は、左右方向に変位する。故に作業者は、押え板74の正位置を左右方向に調整できる。故に水平動機構6は、布105の形状等に応じて、押え板74の正位置を多様化できる。
レール75がスライダ76に対して左右方向に移動することで、押え板74は正位置と側方位置の間を移動する。故に水平動機構6は、レール75がスライダ76に対して移動する構成により押え板74の左右方向の移動を安定化できる。
付替前のエアシリンダ72では、ロッド72Bが筒部72Aから左方に進出した時、押え板74は側方位置にある。付替後のエアシリンダ72では、ロッド72Bが筒部72Aから右方に進出した時、押え板74は側方位置にある。即ち、昇降板71が支持するエアシリンダ72は、ロッド72Bが筒部72Aから左方に進出する形態と、ロッド72Bが筒部72Aから右方に進出する形態に切替る。故に、水平動機構6は、押え板74が側方位置に移動する時の移動方向を切替可能となる。故に水平動機構6は押え板74の側方位置を多様化できる。
CPU51が押え板74を正位置と側方位置の間で移動する時(S123、S141)、押え板74は離隔位置にある(S122)。故に水平動機構6は、押え板74の正位置と側方位置の間の移動を、安定化する。CPU51は、側方位置から正位置に移動した押え板74を、押圧位置に移動する(S143)。故に水平動機構6は、送り板77に載置した布105を、押え板74で迅速に押えることができる。
上記実施形態では、水平動機構6は本発明の布押え装置の一例である。押え板74は本発明の布押え板の一例である。後端部77Aは本発明の連結部分の一例である。昇降板71は本発明の固定部材の一例である。押え足73は本発明の可動部材の一例である。スライダ76は本発明の移動部の一例である。エアシリンダ69は本発明の第二駆動部の一例である。前後方向は本発明の第一方向の一例である。左右方向は本発明の第二方向の一例である。一方側は本発明の前側の一例である。正位置は本発明の作動位置の一例である。側方位置は本発明の退避位置の一例である。右方は本発明の一方の一例である。左方は本発明の他方の一例である。
S123を実行するCPU51は本発明の第一駆動制御部の一例である。S141を実行するCPU51は本発明の第二駆動制御部の一例である。S142を実行するCPU51は本発明の第三駆動制御部の一例である。
本発明は、上記実施形態に限定しない。上記搬送システム300では、CPU51が、押え板74を側方位置へ移動した後(S123)、保持体70を引取位置Aに移動することで(S131)、送り板77は、布105を支持する。これに代えて、CPU51が押え板74を側方位置へ移動した後に、作業者が送り板77に布105を載置してもよい。
上記搬送システム300では、水平動機構6が布105Aを引継位置Aに配置した後、帯電装置135が吸着面136に布105Aを吸着して取り出す。これに代えて、水平動機構6が引継位置Aに配置した布104Aを、作業者が取り出しでもよい。
スライダ76は、昇降板71に固定される代わりに、押え足73の延設部73Aに固定してもよい。該時、レール75は、延設部73Aに固定する代わりに、昇降板71に固定する。二股部97は、一対の接触部97Bを備える代わりに、一対の接触部97Bのいずれか一方を備えていてもよい。保持体70は、エアシリンダ69の動力によって上下動する代わりに、モータ、アクチュエータ等の動力によって電動で上下動してもよい。押え板74は、エアシリンダ72の動力によって左右動する代わりに、モータ、アクチュエータ等の動力によって電動で左右動してもよい。
水平動機構6はナット98を備えなくてもよい。即ち、締結部材99の軸部99Aは、ナット98に挿通してなくてもよい。該時でも、作業者が締結部材99を回転することで頭部99Bは左右方向に変位する。
1 ミシン
6 水平動機構
51 CPU
65A 先端部
65 押え腕
69 エアシリンダ
71 昇降板
72 エアシリンダ
72A 筒部
72B ロッド
73 押え足
74 押え板
75 レール
76 スライダ
77 送り板
77A 後端部
83 連結部材
90 送り板支持機構
91 締結穴
97B 接触部
99 締結部材
99A 軸部
99B 頭部
105 布
6 水平動機構
51 CPU
65A 先端部
65 押え腕
69 エアシリンダ
71 昇降板
72 エアシリンダ
72A 筒部
72B ロッド
73 押え足
74 押え板
75 レール
76 スライダ
77 送り板
77A 後端部
83 連結部材
90 送り板支持機構
91 締結穴
97B 接触部
99 締結部材
99A 軸部
99B 頭部
105 布
Claims (7)
- 水平方向と平行な第一方向と、前記水平方向と平行且つ前記第一方向と直交する第二方向に移動可能であり、布を載置する送り板と、
前記送り板に連結し、前記送り板の連結部分から前記第一方向の一方側へ延び、前記一方側の端部であって前記送り板よりも上側に先端部を有する押え腕と、
前記押え腕の前記先端部に上下方向に移動可能に連結する連結部材と、
前記連結部材にて支持し且つ前記送り板と平行であり、前記連結部材の上下動に伴い前記送り板との間で前記布を押える押圧位置と、前記押圧位置よりも上側で前記送り板から離隔する離隔位置の間を移動する布押え板と
を備えた布押え装置において、
前記連結部材にて支持し、平面視で前記布押え板が前記押え腕の前記先端部と前記第一方向に並ぶ作動位置と、前記作動位置から前記布押え板が前記押え腕の前記先端部に対し前記第二方向にずれる退避位置の間で、前記布押え板を前記第二方向に移動可能に支持する送り板支持機構と、
前記連結部材にて支持し、前記送り板支持機構を介して前記布押え板を前記作動位置と前記退避位置の間で移動する第一駆動部と
を備えたことを特徴とする布押え装置。 - 前記第一駆動部は、前記第二方向に延びるロッドを有し、前記ロッドを前記第二方向に進退するエアシリンダであり、
前記送り板支持機構は、
前記連結部材に固定し、前記エアシリンダを支持する固定部材と、
前記固定部材に対して前記第二方向に移動可能に前記ロッドに連結し、前記布押え板を支持する可動部材と
を備えたことを特徴とする請求項1に記載の布押え装置。 - 前記可動部材に設け、前記第二方向に沿う締結穴と、
前記第二方向に延び、一端部を前記締結穴に差し込む軸部と、前記軸部の他端部に設ける頭部とを有する締結部材と、
前記固定部材に設け、前記締結部材の前記頭部が接触する接触部と
を備え、
前記布押え板が前記退避位置にある時、前記締結部材の前記頭部が前記接触部から離隔し、
前記布押え板が前記作動位置にある時、前記締結部材の前記頭部が前記接触部に接触することを特徴とする請求項2に記載の布押え装置。 - 前記固定部材と前記可動部材の何れか一方に固定し、前記第二方向に延びるレール部材と、
前記固定部材と前記可動部材の何れか他方に固定し、前記レール部材に対して前記第二方向に相対移動可能に連結する移動部と
を備えたことを特徴とする請求項2又は3に記載の布押え装置。 - 前記エアシリンダは、前記ロッドを前記第二方向に進退可能に支持する筒部を備え、
前記固定部材は、
前記ロッドが前記筒部から前記第二方向の一方に進出する形態と、前記ロッドが前記筒部から前記第二方向の他方に進出する形態との何れかで前記エアシリンダを支持し、
前記布押え板が前記退避位置にある時、前記ロッドが前記筒部から前記第二方向の一方又は他方に進出し、
前記布押え板が前記作動位置にある時、前記ロッドが前記筒部に退入することを特徴とする請求項2〜4の何れか一つに記載の布押え装置。 - 前記押え腕に設け、前記連結部材を上下動することで、前記布押え板を前記押圧位置と前記離隔位置の間で移動する第二駆動部と、
前記第一駆動部と前記第二駆動部を駆動制御する制御部と
を備え、
前記制御部は、
前記第二駆動部が前記離隔位置に移動した前記布押え板を、前記作動位置から前記退避位置に移動するよう前記第一駆動部を駆動制御する第一駆動制御部と、
前記第一駆動制御部が前記退避位置に移動した前記布押え板を、前記作動位置に移動するよう前記第一駆動部を駆動制御する第二駆動制御部と、
前記第二駆動制御部が前記作動位置に移動した前記布押え板を、前記離隔位置から前記押圧位置に移動するよう前記第二駆動部を駆動制御する第三駆動制御部と
を備えたことを特徴とする請求項1〜5の何れか一つに記載の布押え装置。 - 請求項1〜6の何れか一つに記載の布押え装置を備えたことを特徴とするミシン。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016058327A JP2017169761A (ja) | 2016-03-23 | 2016-03-23 | 布押え装置と布押え装置を備えたミシン |
| CN201710179037.9A CN107227562B (zh) | 2016-03-23 | 2017-03-23 | 压布装置和具有压布装置的缝纫机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016058327A JP2017169761A (ja) | 2016-03-23 | 2016-03-23 | 布押え装置と布押え装置を備えたミシン |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017169761A true JP2017169761A (ja) | 2017-09-28 |
Family
ID=59933065
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016058327A Pending JP2017169761A (ja) | 2016-03-23 | 2016-03-23 | 布押え装置と布押え装置を備えたミシン |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017169761A (ja) |
| CN (1) | CN107227562B (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109706626A (zh) * | 2019-03-06 | 2019-05-03 | 苏州工业园区天源服装有限公司 | 省位机及省位机系统 |
| CN112647202A (zh) * | 2020-12-30 | 2021-04-13 | 佛山市科华智缝设备有限公司 | 一种横式拉手锁边机 |
| CN116949696A (zh) * | 2023-09-04 | 2023-10-27 | 江苏乐江智能装备有限公司 | 一种缝纫机滑动储物机构 |
| US12312723B2 (en) * | 2022-11-22 | 2025-05-27 | Juki Corporation | Creasing apparatus |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111436706A (zh) * | 2020-05-22 | 2020-07-24 | 浙江辛帝亚自动化科技有限公司 | 一种全自动打扣机 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1007742B (zh) * | 1985-10-08 | 1990-04-25 | 普罗菲尔意大利有限公司 | 用于缝纫机的气动辅助夹持器 |
| JPS6377487A (ja) * | 1986-09-20 | 1988-04-07 | ジューキ株式会社 | ミシンにおける縫製品の縫合装置 |
| JPH04256778A (ja) * | 1991-02-12 | 1992-09-11 | Brother Ind Ltd | 色柄付きシート材の加工装置 |
| JP2000104704A (ja) * | 1998-09-30 | 2000-04-11 | Juki Corp | エア−シリンダ−におけるエア−補給装置。 |
| JP2002275754A (ja) * | 2001-03-15 | 2002-09-25 | Tokai Ind Sewing Mach Co Ltd | 刺繍ミシン |
| JP4522638B2 (ja) * | 2002-01-23 | 2010-08-11 | Juki株式会社 | 玉縁縫製装置、および、玉縁縫製方法 |
| JP2008229223A (ja) * | 2007-03-23 | 2008-10-02 | Brother Ind Ltd | ミシンの布押え装置 |
| CN101538779B (zh) * | 2009-04-16 | 2012-11-28 | 上海贵衣缝纫设备有限公司 | 花样机可伸缩小压板机构 |
| CN101613914A (zh) * | 2009-07-27 | 2009-12-30 | 上海贵衣缝纫设备有限公司 | 花样机压料结构 |
| CN201459374U (zh) * | 2009-07-27 | 2010-05-12 | 上海贵衣缝纫设备有限公司 | 花样机压料结构 |
| CN202482601U (zh) * | 2012-02-24 | 2012-10-10 | 宁波舒普机电科技有限公司 | 一种花样缝纫机的压布装置 |
| KR20130133428A (ko) * | 2012-05-29 | 2013-12-09 | 주식회사 썬스타 | 이동식 반전 장치, 이를 구비하는 재봉기 그리고 이에 적합한 재봉 방법 |
| CN203639675U (zh) * | 2013-11-19 | 2014-06-11 | 广东溢达纺织有限公司 | 车缝送料装置及车缝装置 |
-
2016
- 2016-03-23 JP JP2016058327A patent/JP2017169761A/ja active Pending
-
2017
- 2017-03-23 CN CN201710179037.9A patent/CN107227562B/zh active Active
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109706626A (zh) * | 2019-03-06 | 2019-05-03 | 苏州工业园区天源服装有限公司 | 省位机及省位机系统 |
| CN112647202A (zh) * | 2020-12-30 | 2021-04-13 | 佛山市科华智缝设备有限公司 | 一种横式拉手锁边机 |
| US12312723B2 (en) * | 2022-11-22 | 2025-05-27 | Juki Corporation | Creasing apparatus |
| CN116949696A (zh) * | 2023-09-04 | 2023-10-27 | 江苏乐江智能装备有限公司 | 一种缝纫机滑动储物机构 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107227562B (zh) | 2020-01-07 |
| CN107227562A (zh) | 2017-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6728834B2 (ja) | 布把持装置 | |
| CN107227564B (zh) | 输送装置及输送系统 | |
| JP2017169761A (ja) | 布押え装置と布押え装置を備えたミシン | |
| KR20180033283A (ko) | 로봇 및 그 제어 방법 | |
| CN102108606B (zh) | 缝制装置 | |
| JP2015066384A (ja) | 縫製システム | |
| CN104514102B (zh) | 缝制系统、供给装置和缝纫机 | |
| JP2017169759A (ja) | 搬送システム | |
| CN104514098B (zh) | 缝纫机和缝纫机的控制方法 | |
| CN108691101B (zh) | 基准图像生成系统和缝制系统 | |
| JP2017169762A (ja) | 布押え装置と布押え装置を備えたミシン | |
| CN110318166A (zh) | 送布系统 | |
| JP2017176388A (ja) | 布送り装置とミシン | |
| CN204174396U (zh) | 缝制系统和保持体 | |
| CN108691100B (zh) | 缝制系统 | |
| CN111926470A (zh) | 缝纫机 | |
| JP2020054753A (ja) | 縫製システムと制御方法 | |
| JP2018130498A (ja) | 生地供給装置 | |
| CN103572512B (zh) | 缝纫机 | |
| JP2019177100A (ja) | 布縫製システムと布縫製方法 | |
| JP2020054752A (ja) | 布搬送システムと制御方法 | |
| CN104514097B (zh) | 缝纫机和缝制系统 | |
| CN118065062A (zh) | 折痕赋予装置 | |
| CN118007327A (zh) | 可移动对位的车缝装置 | |
| CN119686039A (zh) | 缝纫机及缝制方法 |