JP2017170929A - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP2017170929A JP2017170929A JP2016055752A JP2016055752A JP2017170929A JP 2017170929 A JP2017170929 A JP 2017170929A JP 2016055752 A JP2016055752 A JP 2016055752A JP 2016055752 A JP2016055752 A JP 2016055752A JP 2017170929 A JP2017170929 A JP 2017170929A
- Authority
- JP
- Japan
- Prior art keywords
- control
- deceleration
- time
- control mode
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001133 acceleration Effects 0.000 claims abstract description 97
- 238000004364 calculation method Methods 0.000 claims abstract description 56
- 230000008859 change Effects 0.000 claims abstract description 37
- 230000007423 decrease Effects 0.000 claims description 70
- 238000002360 preparation method Methods 0.000 claims description 31
- 230000004044 response Effects 0.000 description 12
- 230000036461 convulsion Effects 0.000 description 11
- 238000000034 method Methods 0.000 description 9
- 238000001514 detection method Methods 0.000 description 8
- 230000002123 temporal effect Effects 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000010720 hydraulic oil Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000004904 shortening Methods 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 230000004069 differentiation Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2009—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/107—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2230/00—Monitoring, detecting special vehicle behaviour; Counteracting thereof
- B60T2230/04—Jerk, soft-stop; Anti-jerk, reduction of pitch or nose-dive when braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Power Engineering (AREA)
- Regulating Braking Force (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
図1は、制御装置10のブロック図である。図1に例示されるように、制御装置10は、ジャーク制限演算部11や、車両加速度算出部12、走行抵抗算出部13、目標加速度算出部14、制御態様決定部15、操作量算出部16等を有する。なお、制御装置10において演算される値の次元は、加速度であってもよいしトルクであってもよいし、演算の途中で変換されてもよい。
制御装置10は、自動運転時の車両の減速制御に関し、以下の三つの減速制御を実行することができる。
(1)駆動装置20による減速制御(第一の減速制御)
(2)制動装置30による減速制御(第二の減速制御)
(3)制動装置30を準備状態とする制動準備制御
ここに、制動準備制御とは、制動装置30を制動の準備状態とする、プリチャージ、予備加圧、予備制動とも称される制御であり、具体的に、制動準備制御とは、制動装置30の油圧系において作動油を供給する電動ポンプを動作させることにより、マスタシリンダ内に作動油の流れの通路抵抗に応じた比較的低い油圧(予圧)を生じさせ、制動装置30による本格的な制動が開始される前に、油圧系を作動油で満たすとともに制動装置30のパッドとディスクまたはロータとの隙間を予め詰めておくという、電動ポンプの制御である。制動準備制御を実行することにより、制動装置30の応答性が高まる。
(第一の制御モード)
第一の制御モードは、まずは駆動装置20による第一の減速制御のみを実行し、限界時刻となる前に当該第一の減速制御に加えて制動装置30による第二の減速制御を開始する制御モードである。ここに、限界時刻とは、第一の減速制御のみにより車両を減速した場合に、要求値が、第一の減速制御によって達成できる下限の加速度またはトルクに対応する限界要求値に到達する時刻、である。
(第二の制御モード)
第二の制御モードは、まずは駆動装置20による第一の減速制御のみを実行し、限界時刻となる前に当該第一の減速制御に加えて制動装置30を準備状態とする制動準備制御を開始する制御モードである。
(第三の制御モード)
第三の制御モードは、制動装置30による第二の減速制御において、フィードフォワード制御およびフィードバック制御の双方による制御が可能な制御モードである。
(第四の制御モード)
第四の制御モードは、制動装置30による第二の減速制御において、当該制動装置30による第二の減速制御の開始から所定時間(第二の閾値時間)が経過する前にあっては、フィードフォワード制御のみが可能、すなわちフィードバック制御が禁止される、制御モードである。第一の閾値時間の経過後は、フィードフォワード制御およびフィードバック制御の双方による制御が許容される。
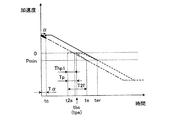
図4には、第一の制御モードが実行された場合における、加速度の要求値および実加速度の、経時変化の一例が示されている。図4中、一点鎖線は、駆動装置20に対する加速度の要求値であり、太い実線は駆動装置20の作動に基づく車両の実加速度であり、二点鎖線は、制動装置30に対する加速度の要求値であり、太い破線は制動装置30の作動に基づく車両の実加速度である。
図5には、第二の制御モードが実行された場合における、加速度の要求値および実加速度の経時変化の一例が示されている。図5中、一点鎖線は、駆動装置20に対する加速度の要求値であり、太い実線は駆動装置20の作動に基づく車両の実加速度であり、二点鎖線は、制動装置30に対する加速度の要求値であり、太い破線は制動装置30の作動に基づく車両の実加速度である。
Claims (3)
- 車両の前後方向の加速度合いを示す要求値の低下に応じて車両を減速制御する場合に、駆動装置により車両を減速させる第一の減速制御、制動装置により車両を減速させる第二の減速制御、および前記制動装置を準備状態とする制動準備制御を実行可能な車両の制御装置であって、
前記要求値の経時変化に基づいて、前記第一の減速制御のみにより車両を減速させた場合に前記要求値が当該第一の減速制御によって達成できる下限の加速度またはトルクに対応する限界要求値に到達する限界時刻を予測する、予測部と、
前記要求値に基づいて制御モードを決定する制御モード決定部であって、前記制御モードとして、前記第一の減速制御のみを実行し、前記限界時刻となる前に前記第一の減速制御に加えて前記第二の減速制御を開始する第一の制御モード、および前記第一の減速制御のみを実行し、前記限界時刻となる前に前記第一の減速制御に加えて前記制動準備制御を開始する第二の制御モード、のうち一方を選択する制御モード決定部と、
前記決定された制御モードに応じて前記要求値に基づく前記駆動装置および前記制動装置の操作量を算出する操作量算出部と、
を備えた、車両の制御装置。 - 前記制御モード決定部は、前記要求値の単位時間あたりの低下率が所定の低下率閾値よりも低下が急な場合にあっては前記第一の制御モードを選択し、前記低下率が前記低下率閾値よりも低下が緩やかな場合にあっては前記第二の制御モードを選択する、請求項1に記載の車両の制御装置。
- 前記制御モード決定部は、前記第二の制御モードの後の前記制御モードを、前記第二の制御モードにおける前記制動準備制御の開始から第一の閾値時間を経過した後から前記第二の減速制御を実行する第三の制御モード、および前記第二の制御モードにおける前記制動準備制御の開始から第一の閾値時間を経過する前から前記第二の減速制御を実行する第四の制御モードのうち一方に決定可能であり、
前記操作量算出部は、フィードフォワード制御による第一の操作量とフィードバック制御による第二の操作量とを加算した操作量を出力可能であり、前記第四の制御モードにおいて当該第四の制御モードの開始から第二の閾値時間が経過する前にあっては前記第二の操作量の加算を禁止する、請求項1または2に記載の車両の制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016055752A JP6493262B2 (ja) | 2016-03-18 | 2016-03-18 | 車両の制御装置 |
| DE112017001415.8T DE112017001415B4 (de) | 2016-03-18 | 2017-03-15 | Fahrzeugsteuervorrichtung |
| CN201780017855.7A CN109219548B (zh) | 2016-03-18 | 2017-03-15 | 车辆的控制装置 |
| US16/081,156 US10836364B2 (en) | 2016-03-18 | 2017-03-15 | Vehicle control device |
| PCT/JP2017/010347 WO2017159717A1 (ja) | 2016-03-18 | 2017-03-15 | 車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016055752A JP6493262B2 (ja) | 2016-03-18 | 2016-03-18 | 車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017170929A true JP2017170929A (ja) | 2017-09-28 |
| JP6493262B2 JP6493262B2 (ja) | 2019-04-03 |
Family
ID=59850720
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016055752A Active JP6493262B2 (ja) | 2016-03-18 | 2016-03-18 | 車両の制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10836364B2 (ja) |
| JP (1) | JP6493262B2 (ja) |
| CN (1) | CN109219548B (ja) |
| DE (1) | DE112017001415B4 (ja) |
| WO (1) | WO2017159717A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022176984A (ja) * | 2019-02-20 | 2022-11-30 | トヨタ自動車株式会社 | 制動力制御装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6493262B2 (ja) * | 2016-03-18 | 2019-04-03 | 株式会社アドヴィックス | 車両の制御装置 |
| JP7056474B2 (ja) | 2018-08-30 | 2022-04-19 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法及び車両 |
| IT202000000976A1 (it) * | 2020-01-20 | 2021-07-20 | Iveco France Sas | Sistema e metodo per la regolazione dello strattone in un veicolo autonomo |
| SE544474C2 (en) * | 2020-08-27 | 2022-06-14 | Scania Cv Ab | Control device and method for controlling a hydraulic auxiliary brake arrangement |
| JP7402847B2 (ja) * | 2021-09-17 | 2023-12-21 | 株式会社アドヴィックス | 車両用制御装置 |
| CN119037168B (zh) * | 2024-10-28 | 2025-01-28 | 成都农业科技职业学院 | 一种农机多地形行进方法 |
| CN119459348B (zh) * | 2025-01-13 | 2025-11-25 | 成都赛力斯科技有限公司 | 车辆制动控制方法、装置、新能源汽车和存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006254553A (ja) * | 2005-03-09 | 2006-09-21 | Toyota Motor Corp | 車両の制御装置 |
| JP2007118791A (ja) * | 2005-10-28 | 2007-05-17 | Advics:Kk | 車両用自動制動装置 |
| JP2010018239A (ja) * | 2008-07-14 | 2010-01-28 | Denso Corp | 車両制御装置 |
| WO2012098680A1 (ja) * | 2011-01-21 | 2012-07-26 | トヨタ自動車株式会社 | 車両制御装置 |
| WO2013125049A1 (ja) * | 2012-02-26 | 2013-08-29 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101304208B1 (ko) * | 2009-09-01 | 2013-09-05 | 주식회사 만도 | 회생 제동 시스템의 유압 제어 방법 |
| JP5510227B2 (ja) * | 2010-09-15 | 2014-06-04 | トヨタ自動車株式会社 | 車両制御装置 |
| GB2483720B (en) * | 2010-09-20 | 2017-10-25 | Jaguar Land Rover Ltd | Improvements relating to brake control |
| BR112013009834B1 (pt) * | 2010-10-21 | 2020-10-13 | Nissan Motor Co., Ltd. | dispositivo de controle de desaceleração rápida em veículo híbrido |
| DE102011003494A1 (de) * | 2011-02-02 | 2012-08-02 | Robert Bosch Gmbh | Verfahren zum Bremsen eines Fahrzeugs mit einem Hybrid-Bremssystem |
| CN104080683B (zh) * | 2012-02-03 | 2016-10-19 | 丰田自动车株式会社 | 减速因素推定装置以及驾驶辅助装置 |
| US8868311B2 (en) * | 2012-10-04 | 2014-10-21 | Robert Bosch Gmbh | Method to deal with slow initial brake response for adaptive cruise control |
| US9238412B2 (en) * | 2014-03-18 | 2016-01-19 | GM Global Technology Operations LLC | Normalizing deceleration of a vehicle having a regenerative braking system |
| KR101628148B1 (ko) * | 2014-08-27 | 2016-06-08 | 현대자동차 주식회사 | 하이브리드 차량의 회생 제동 장치 및 방법 |
| US9327732B1 (en) * | 2015-06-15 | 2016-05-03 | Ford Global Technologies, Llc | Method and assembly for changing thermal energy levels in a vehicle by adjusting engine braking |
| DE102016204136B4 (de) * | 2016-03-14 | 2018-07-12 | Ford Global Technologies, Llc | Verfahren und Vorrichtung zur automatisierten Längsbewegungssteuerung eines Kraftfahrzeugs |
| JP6493262B2 (ja) * | 2016-03-18 | 2019-04-03 | 株式会社アドヴィックス | 車両の制御装置 |
| KR102751064B1 (ko) * | 2016-12-15 | 2025-01-08 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
-
2016
- 2016-03-18 JP JP2016055752A patent/JP6493262B2/ja active Active
-
2017
- 2017-03-15 US US16/081,156 patent/US10836364B2/en active Active
- 2017-03-15 WO PCT/JP2017/010347 patent/WO2017159717A1/ja not_active Ceased
- 2017-03-15 CN CN201780017855.7A patent/CN109219548B/zh active Active
- 2017-03-15 DE DE112017001415.8T patent/DE112017001415B4/de active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006254553A (ja) * | 2005-03-09 | 2006-09-21 | Toyota Motor Corp | 車両の制御装置 |
| JP2007118791A (ja) * | 2005-10-28 | 2007-05-17 | Advics:Kk | 車両用自動制動装置 |
| JP2010018239A (ja) * | 2008-07-14 | 2010-01-28 | Denso Corp | 車両制御装置 |
| WO2012098680A1 (ja) * | 2011-01-21 | 2012-07-26 | トヨタ自動車株式会社 | 車両制御装置 |
| WO2013125049A1 (ja) * | 2012-02-26 | 2013-08-29 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022176984A (ja) * | 2019-02-20 | 2022-11-30 | トヨタ自動車株式会社 | 制動力制御装置 |
| JP7439869B2 (ja) | 2019-02-20 | 2024-02-28 | トヨタ自動車株式会社 | 制動力制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017159717A1 (ja) | 2017-09-21 |
| DE112017001415T5 (de) | 2018-12-06 |
| CN109219548B (zh) | 2022-03-22 |
| US20190023240A1 (en) | 2019-01-24 |
| JP6493262B2 (ja) | 2019-04-03 |
| DE112017001415B4 (de) | 2023-02-16 |
| CN109219548A (zh) | 2019-01-15 |
| US10836364B2 (en) | 2020-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6493262B2 (ja) | 車両の制御装置 | |
| KR101519729B1 (ko) | 차량의 변속시 회생제동 제어방법 | |
| CN107487324B (zh) | 控制电动汽车转矩的方法和装置 | |
| WO2022071500A1 (ja) | 制動制御装置 | |
| CN104956049B (zh) | 用于控制具有可变压缩比的内燃机的方法和装置 | |
| JP2016034818A (ja) | 車両用走行制御装置 | |
| KR20130098981A (ko) | 전기적으로 작동가능한 브레이크를 제어하는 방법 및 디바이스 그리고 전자식 브레이크 시스템 | |
| CN106476812A (zh) | 用于使得汽车驱动系统工作的方法和装置 | |
| EP3335950B1 (en) | Electric brake system | |
| JP2017061293A (ja) | 電動機を備えた車両固有のブレーキシステムを運転するための方法、および車両固有のブレーキシステムの少なくとも1つの電動機のための制御装置 | |
| US10717425B2 (en) | Braking force control system | |
| CN113954657A (zh) | 电动汽车及其模式切换方法、装置、存储介质 | |
| WO2017073132A1 (ja) | 車両試験装置および車両試験装置の車速偏差算出方法 | |
| WO2014122725A1 (ja) | 車両の制御装置 | |
| JP5775220B1 (ja) | フォークリフト及びフォークリフトの制御方法 | |
| JP5833889B2 (ja) | 車両の走行制御装置 | |
| JP7534193B2 (ja) | 車両制御装置 | |
| JP6323080B2 (ja) | 車両用制御装置 | |
| KR101940181B1 (ko) | 스마트 부스터 제동장치 및 이를 이용한 긴급제동 시 압력 제어방법 | |
| KR20200023783A (ko) | 차량의 변속 장치 및 변속 방법과, 차량의 전기 모터 제어 장치 | |
| JP6349191B2 (ja) | 車両制御装置 | |
| WO2025121124A1 (ja) | 制動制御装置及び制動制御方法 | |
| JP2015157576A (ja) | 車両制御装置および車両用ブレーキ制御装置 | |
| JP2019006254A (ja) | 走行制御装置 | |
| JP2010223312A (ja) | ソレノイドの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190218 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6493262 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |